系统的稳定性nyquist判据以及bode判据
Bode 稳定性判定PPT课件
第五章 系统的稳定性
5.4 Bode稳定判据
三、Bode稳定判据
在Bode图上,当由0→+∞时,在开环对数幅频特性为正
值的频率范围内,开环对数相频特性对-180°线的正负穿越 次数的代数和为P/2。
P=2N 或 N=P/2
特别
P=0时,若 ωc<ωg,闭环系统稳定
ωc>ωg,闭环系统不稳定 ωc =ωg, 闭环系统临界稳定
谢谢您的指导
THANK YOU FOR 的内容可以在下载后随意修改,调整和打印。欢迎下载!
汇报人:XXXX 日期:20XX年XX月XX日
第五章 系统的稳定性
5.4 Bode稳定判据
(-1,j0)
ωc ωg
ωc ωg1 ωg2 ωg3
ωc:幅值穿越频率(剪切频率)
A(ωc)=1 L(ωc)=0
ωg:相位穿越频率
φ(ωg)= -180°
第五章 系统的稳定性
二、穿越的概念
(-1,j0)
5.4 Bode稳定判据
_+
开环对数幅频特性为正值的频率范围内, 其对数相频特性穿过-180°线
第五章 系统的稳定性
5.4 Bode稳定判据
5.4 Bode(伯德)稳定判据
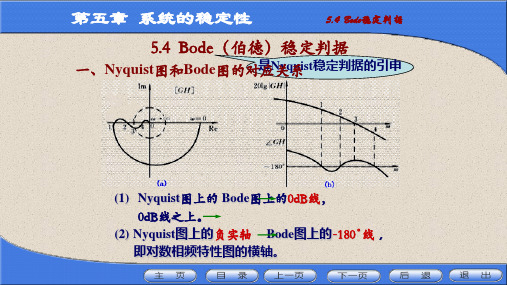
一、Nyquist图和Bode图的对是应N关yq系uist稳定判据的引申
(1) Nyquist图上的 Bode图上的0dB线, 0dB线之上。
(2) Nyquist图上的负实轴 Bode图上的-180°线, 即对数相频特性图的横轴。
系统的稳定性常见判据

定义:
无输入时的初态
系统在初始状态作用下
输入引起的初态
输出
收敛(回复平衡位置)
(响应) 发散(偏离越来越大)
系统稳定 系统不稳定
2. 系统稳定条件
线性定常系统:
anxo(n) (t )
an
1
x ( n1) o
(
t
)
a1
x o(
其中:
A1
an1an2 anan3 an1
A2
an1an4 anan5 an1
A3
an1an6 anan7 an1
B1
A1an3 an1 A2 A1
B2
A1an5 an1 A3 A1
B3
A1an7 an1 A4 A1
s0 F1
Routh 判据:Routh表中第一列各元符号改变的次数等于系统特
t
)
a0 xo(t )
xi(t )
自由响应
强迫响应
n
n
xo(t ) A1ie sit A2ie sit B(t )
i 1
i 1
系统的初态引 输入引起的 起的自由响应 自由响应
si:系统的特征根
2. 系统稳定条件
1) 当系统所有的特征根si(i=1,2,…,n)均具有负实部(位
于[s]平面的左半平面)
lt im
n i 1
A1i e si t
n i 1
A2i e si t
0
自由响应收敛,系统稳定
2) 若有任一sk具有正实部(位于[s]平面的右半平面)
lim e skt
t
ltim
第5章 系统的稳定性

s5 s4 s s
3
1
24
48
0
96
25
50 0
F (s) 2s 4 48s 2 50 0
取F(s)对s的导数得新方程:
2
0
8
24
0
F (s) 8s3 96s 0
用上式中的系数8和96代替0元 行,继续进行运算。
2
50
0
0
s1 s0
112 .7
50
改变符号一次
武汉理工大学材料学院 当解析点s按顺时针方向沿Ls变化一周时,向量F(s)将按顺时针方 向旋转N 周,即F(s)以原点为中心顺时针旋转N 周,这就等于曲线LF 顺时针包围原点N 次。若令Z 为包围于Ls内的F(s)的零点数,P 为包 围于Ls 内的F(s)的极点数,则有 N =Z-P
j
Im
(5.3.2)
武汉理工大学材料学院
(2)令s=z-1,代入特征方程得:
( z 1)3 14( z 1)s 2 40( z 1) 40K 0
即
z 3 11z 2 15z 40K 27 0
由Routh表和Routh判据得:
列Routh表如下:
s3
1
11
15
s2
40 K 27
4 2
解此辅助多项式可得:
s 1; s j5
这两对复根是原特征方程的根的一部分。
武汉理工大学材料学院
四、相对稳定性的检验
对于稳定的系统,应用Routh判据还可以检验系统 的相对稳定性。方法如下: (1)将s平面的虚轴向左移动某个数值,即令s=z- σ (σ 为正实数),代入系统特征方程,则得到关于z的特 征方程。
系统的稳定性nyquist判据以及bode判据46页PPT

1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周稳定性nyquist判据以及bode判据
1、合法而稳定的权力在使用得当时很 少遇到 抵抗。 ——塞 ·约翰 逊 2、权力会使人渐渐失去温厚善良的美 德。— —伯克
3、最大限度地行使权力总是令人反感 ;权力 不易确 定之处 始终存 在着危 险。— —塞·约翰逊 4、权力会奴化一切。——塔西佗
5、虽然权力是一头固执的熊,可是金 子可以 拉着它 的鼻子 走。— —莎士 比
10 系统的稳定性分析Nyquist稳定判据
根据米哈伊洛夫定理推论: arg DK ( j ) n 若闭环也稳定,当由0变化到时:
arg DB ( j ) n
2
2
从而:
argF ( j) argDB ( j) argDK ( j) 0
上式表明,若系统开环稳定,则当由0变化到时, F(j) 的相角变化量等于0 时,系统闭环也稳定。
注意到: F ( j) 1 G( j) H ( j) 即:
G( j ) H ( j ) F ( j ) 1
上式表明,在复平面上将F(j)的轨迹向左移动一 个单位,便得到G(j)H(j) 的轨迹。
Im
=
-1 0
=0
Re
1
G(j)H(j)
F(j)
7.4 乃奎斯特稳定性判据
7.4 乃奎斯特稳定性判据 Im
D(j)
Im
-p
j 0
'
-p
Re
由图易知,当由0变化到时, D(j)逆时针旋转 90°,即相角变化了 /2。 arg D ( j )
2
若特征根为正实根,则当由0变化到时:
arg D ( j )
2
7.4 乃奎斯特稳定性判据
代数稳定性判据判别系统的稳定性,要求必须知 道闭环系统的特征方程,而实际系统的特征方程是 难以写出来的,另外它很难判别系统稳定或不稳定 的程度,也很难知道系统中的各个参数对系统性能 的影响。
两种常用的频域稳定判据:Nyquist稳定判据(简称
乃氏判据)和对数频率稳定判据。
Nyquist判据根据开环幅相曲线判别闭环系统稳定性;
7.4 乃奎斯特稳定性判据
机械工程控制基础(第5章_系统的稳定性)

(5.2.3)
武科大城市学院
机电学部
比较式(5.2.2)与式(5.2.3)可看出根与系数有如下的关系:
n an1 si an i 1
n a n2 si s j an i j
i 1, j 2
an3 an
i jk
s s s
i
n
j k
(5.2.4)
i 1, j 2 , k 3
n a0 n 1 si i 1 an
武科大城市学院
机电学部
从式(5.2.4)可知,要使全部特征根 s1 , s2 , , sn 均具有负实部,就必 须满足以下两个条件,即系统稳定的必要条件: (1)特征方程的各项系数 ai (i 0,1, 2,, n 1, n) 都不等于零,因为若有一 系数为零,则必出现实部为零的特征根或实部有正有负的特征根,才 能满足式(5.2.4)中各式。 (2)特征方程的各项系数 ai的符号都相同,这样才能满足式(5.2.4)中各式。 按习惯,一般取 ai 为正值,因此,上述两个条件可归结为系统稳定 的一个必要条件,即
E 来越小,系统最终趋于稳定; ( s )
若反馈的结果,加强了E(s)的作用(即正反馈),则使 Xo(s) 越来越 大,此时,此闭环系统是否稳定,则视 Xo( s ) 是收敛还是发散而定。
武科大城市学院
机电学部
第三,控制理论中所讨论的稳定性其实都是指自由振荡下的稳定性。
即讨论输入为零,系统仅存在有初始状态不为零时的稳定性,即
武科大城市学院
机电学部
5.2.2 系统稳定的充要条件
1. Routh表
(1)将系统的特征方程式(5.2.1)的系数按下列形式排成两行:
an
an1ห้องสมุดไป่ตู้
控制系统稳定性控制
控制系统稳定性控制控制系统的稳定性是指在系统输入和干扰的作用下,系统输出能够保持在一定范围内,并且不会发生剧烈的波动或不稳定的情况。
稳定性是控制系统设计和优化中的重要考虑因素,它直接关系到系统的性能和可靠性。
一、稳定性的基本概念在控制系统中,稳定性可以分为两类:绝对稳定性和相对稳定性。
绝对稳定性是指当系统的任何初始条件和参数变化都不会引起系统的输出超出一定范围,系统始终保持稳定。
相对稳定性是指系统在参数变化或干扰作用下,虽然会有一定的波动或震荡,但最终输出会趋于稳定。
二、稳定性判断的方法常用的判断控制系统稳定性的方法有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的状态方程或差分方程来判断系统的稳定性。
常用的判断方法有:极点位置判据、Nyquist稳定性判据、Hurwitz 稳定性判据等。
极点位置判据是指通过分析系统极点的位置来判断系统的稳定性。
当系统的所有极点的实部都小于零时,系统是稳定的。
Nyquist稳定性判据是将控制系统的开环传递函数绘制在复平面上,通过分析曲线的轨迹来判断系统的稳定性。
Hurwitz稳定性判据是通过分析系统特征方程的Jacobi矩阵行列式来判断系统的稳定性。
2. 频域方法频域方法是通过分析系统的频率响应来判断系统的稳定性。
常用的判断方法有:Bode稳定性判据、Nyquist稳定性判据等。
Bode稳定性判据是通过分析系统的频率响应曲线的相角和幅值来判断系统的稳定性。
当系统幅值曲线超过0dB的频率点相角为-180°时,系统是稳定的。
三、控制系统稳定性的控制方法为了保证控制系统的稳定性,通常采取以下方法进行控制:1. 增加稳定裕度稳定裕度是指系统在保持稳定的前提下,对参数变化或负载波动的容忍能力。
通过增加稳定裕度,可以提高系统的鲁棒性和可靠性。
常用的方法有:采用PID控制器、增加系统正反馈等。
2. 优化控制器参数优化控制器参数是通过对系统的传递函数进行分析和调节,使系统的性能指标达到最优。
控制系统稳定性分析
控制系统稳定性分析引言控制系统是一种通过控制输入信号以达到预期输出的系统。
在实际应用中,控制系统的稳定性是非常重要的,因为它直接关系到系统的可靠性和性能。
本文将介绍控制系统稳定性分析的基本概念、稳定性判据以及常见的稳定性分析方法。
基本概念在控制系统中,稳定性是指系统的输出在输入信号发生变化或扰动时,是否能够以某种方式趋向于稳定的状态,而不产生超调或振荡。
在进行稳定性分析之前,我们需要了解几个重要的概念。
稳定性定义对于一个连续时间的线性时不变系统,如果对于任意有界输入信号,系统的输出始终有界,则称该系统是稳定的。
换句话说,稳定系统的输出不会发散或趋向于无穷大。
极点(Pole)系统的极点是指其传递函数分母化简后得到的方程的根。
极点的位置对系统的稳定性有很大的影响,不同的极点位置可能使得系统的稳定性不同。
范围稳定性(Range Stability)当输入信号有界时,系统的输出也保持有界,即系统是范围稳定的。
渐进稳定性(Asymptotic Stability)当输入信号趋向于有界时,系统的输出也趋向于有界,即系统是渐进稳定的。
稳定性判据稳定性判据是用来判断控制系统是否稳定的方法或准则。
常见的稳定性判据有:Routh-Hurwitz判据、Nyquist判据以及Bode稳定判据。
Routh-Hurwitz判据Routh-Hurwitz稳定性判据是一种基于极点位置的方法。
具体步骤如下:1.根据系统的传递函数确定极点。
2.构造Routh表。
3.根据Routh表的符号判断系统的稳定性。
Nyquist判据Nyquist稳定性判据是一种基于频率响应的方法。
具体步骤如下:1.根据系统的传递函数绘制频率响应曲线。
2.根据频率响应曲线的特征判断系统稳定性。
Bode稳定判据Bode稳定判据是一种基于系统的幅频特性和相频特性的方法。
具体步骤如下:1.根据系统的传递函数绘制Bode图。
2.根据Bode图的特征判断系统稳定性。
稳定性分析方法除了以上的稳定性判据外,还有一些常用的稳定性分析方法可以应用于控制系统的稳定性分析。
11系统的稳定性分析Bode稳定判据
1. 相角裕度γ
在频率特性上对应于幅值A(ω)=1(即L(ω)=0)的角频 率称为剪切频率(截止频率),以ωc表示,在剪切频 率处,相频特性距-180°线的相位差γ叫做相角裕 度。即
(c ) (180) 180 (c )
下图(a)表示的具有正相角裕度的系统不仅稳定,而 且还有相当的稳定储备,它可以在ωc的频率下,允 许相角再增加(迟后)γ度才达到临界稳定状态。
-180°线。
一、 乃奎斯特图与伯德图的对应关系
幅相曲线(-1,j0)点左侧
A
的负实轴
j
-1
BC D 0
0
对数幅频特性L(ω)>0(即零 分贝线以上的区域)
对数相频特性-180°线
L( )(dB)
0
截止 频率
c
()()
相位交 0
A B cD
界频率 -180
-270
一、 乃奎斯特图与伯德图的对应关系
7.7 控制系统的相对稳定性
根据稳定性判据可以判别一个系统是否稳定。 但是要使一个实际控制系统能够稳定可靠的工作,刚 好满足稳定性条件是不够的,还必须留有余地。
稳定裕度可以定量地确定一个系统的稳定程度。 它包括相位裕度和幅值裕度。
7.7 控制系统的相对稳定性
➢相对稳定性:若系统开环传递函数没有右半平面的 极点,且闭环系统是稳定的,那么乃氏曲线 G(jω)H(jω)离(-1, j0)点越远,则闭环系统的稳定程 度越高;反之,G(jω)H(jω)离(-1, j0)点越近,则闭 环系统的稳定程度越低;如果G(jω)H(jω)穿过(-1, j0) 点,则闭环系统处于临界稳定状态。 ➢稳定裕度:衡量闭环稳定系统稳定程度的指标,常 用的有相角裕度γ和幅值裕度 Kg。
自动控制原理第四章答案
自动控制原理第四章答案在自动控制原理的学习中,掌握第四章的知识是非常重要的。
本章主要介绍了控制系统的稳定性分析,包括了稳定性的概念、稳定性的判据以及稳定性的研究方法。
下面将对第四章的习题答案进行详细解析,希望能够帮助大家更好地理解和掌握这一部分的内容。
1. 试述控制系统的稳定性概念及其重要性。
控制系统的稳定性是指在一定的工作条件下,系统的输出能够有限地保持在某个范围内,不会发散或者不会无限增大。
稳定性是控制系统正常工作的基础,一个稳定的控制系统才能够实现预期的控制效果,否则就会出现失控的情况,甚至导致系统崩溃。
因此,稳定性是控制系统设计和分析中非常重要的一个指标。
2. 什么是控制系统的稳定性判据?试述Routh-Hurwitz准则的基本思想。
控制系统的稳定性判据是用来判断系统的稳定性的方法和标准。
Routh-Hurwitz准则是一种常用的稳定性判据,其基本思想是通过构造一个特殊的矩阵,来判断系统的特征方程的根的实部是否都小于零,从而确定系统的稳定性。
通过计算特征方程的系数,可以得到一个关于这些系数的表达式,通过这个表达式的符号来判断系统的稳定性。
3. 试述根轨迹法的基本原理及应用条件。
根轨迹法是一种图解法,通过绘制系统的特征方程在复平面上的根轨迹图来判断系统的稳定性。
其基本原理是根据系统的传递函数,找出特征方程的根,并根据这些根在复平面上的分布情况来判断系统的稳定性。
根轨迹法的应用条件是系统的传递函数必须是一个真分式,即分子次数小于分母次数,且分母的所有根必须是实数或者成对共轭的复数。
4. 试述Nyquist稳定性判据的基本原理及应用条件。
Nyquist稳定性判据是一种基于系统的开环频率特性曲线(Nyquist曲线)来判断系统稳定性的方法。
其基本原理是通过绘制系统的开环频率特性曲线,然后根据曲线的形状和特征来判断系统的稳定性。
Nyquist稳定性判据的应用条件是系统必须是线性时不变系统,并且系统的传递函数必须是一个真分式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s
N=0 P=1 Z=P-2N=1 闭环系统有1个右 半平面的特征根
具有单位反馈的非最小相位系统 G(s) K /(Ts 1)
试分析闭环系统的稳定性。
P=? N=?
右半侧极点数为1 P=1 逆时针绕(-1,j0) 圈数与K有关
j Im
解:(1)绘制奈氏曲线
G( j) K /( jT 1) K 1 jT 1 T 2 2
Gs H(s)
2
(s 1)(2s 1)
G j H ( j)
2
2
arctan arctan 2
( j 1)(2 j 1) 1 2 1 42
系统是否稳定?
P=? N=?
右半侧极点数为0 P=0
逆时针绕(-1,j0) 圈数为0圈 N=0 P=N 系统稳定 Z=P-N =0 系统没有特 征根在复平面右半侧
A(0) 20,(0) 0
A() 0,() 270
系统是否稳定? P=? N=?
右半侧极点数为0 P=0
逆时针绕(-1,j0) 圈数为-1圈 N=-1
Z=P-2N =2 系统有两个 特征根在复平面右半侧
s
Nyquist稳定判据
Nyquist稳定判据
3
s
第 三 节 乃 奎 斯 特 稳 定 判 据
例2 设单位反馈系统,其开环传递函数
G(s) K s 2 (Ts 1)
试用奈氏判据判断系统稳定性。 解:开环幅相大致曲线如图所示
0
1 0
曲线顺时针包围(-1,j0)点一圈, N= -1 。P=0,Z= P-2N =2 。
闭环系统不稳定。
用在 (,1) 区间,奈氏曲线的正、负穿越 的次数来确定 N
半正负穿越 若对数相频特性曲线自-180°线向上,为半 次正穿越;反之,为半次负穿越。
当开环传递函数包括积分环节时,在对数相频特性上要补画
0 0 这一段频率变化范围的相角变化曲线。 G( j0 )H ( j0 ) 90o
例如
G(s)H (s)
K
s 2 (Ts 1)
N N 1 , Z P 2N 2
Z P 2N
若Z=0,则闭环系统稳定, 则闭环系统不稳定
Z 0 Z为闭环特征方程正实部根的个数。
例:如图5-17所示的四种开环Bode曲线,试用Nyquist稳 定性判据, 判断系统的稳定性。
已知P=0,在L(ω)≥0的范围内,
N 1 N 1 N N N 0
M P 2N 2
故系统不稳定。
s
第 三 节 乃 奎 斯 特 稳 定 判 据
Nyquist稳定判据
s
第 三 节 乃 奎 斯 特 稳 定 判 据
Nyquist稳定判据
s
第 三 节 乃 奎 斯 特 稳 定 判 据
Nyquist稳定判据
s
第 三 节 乃 奎 斯 特 稳 定 判 据
Nyquist稳定判据
sNyquist稳定判据
Nyquist稳定判据 定义P为开环传递函数在复平面右侧的极点个数。
闭环系统稳定的充要条件是,当 从0变到
﹢∞时,在[GH]平面上系统的开环频率特性逆 时针包围(-1,j0)点N 圈 ,
计算Z=P-2N,若Z=0 说明闭环特征根不在复平 面右半侧,则系统稳定
若Z≠0,说明闭环系统有Z个特征根在复平面右 半侧,系统不稳定。
系统闭环不稳定。
1/T
0
1 0
0 0
0 180
Bode图上的稳定性判据可定义为 一个反馈控制系统, 其闭环特征方程正实部根的个数
为Z,可以根据开环传递函数s右半平面极点的个数P和 开环对数幅频特性大于0dB的所有频率范围内,对数相
频曲线与-π线的正负穿越之差N = N+-N-来确定, 即
例:已知系统开环传递函数
G(s)H (s)
20
(s 1)(2s 1)(5s 1)
应用Nyquist判据判别闭环系统的稳定性
解:G( j)H ( j)
20
( j 1)( j2 1)( j5 1)
A()
20
(1 2 )(1 42 )(1 252 )
() arctg arctg 2 arctg5
自动控制原理
对比
• 劳斯判据 闭环传递函数
• nyquist判据 开环传递函数判断对应的闭 环系统的稳定性
Nyquist 稳定判据
• 利用系统的开环传递函数绘制的nyquist图,判断相应的闭 环系统的稳定性。
复习 一般系统nyquist图的画法
Gs H(s)
2
(s 1)(2s 1)
G j H ( j)
K
0
0
Re
K>1曲线包围 (-1,j0)一圈 N=1 P=N K<1,曲线不包围 (-1,j0),N=0 P≠N,系统不稳定 K=1曲线穿过(-1,j0)系统临界稳定。
G j H ( jw)
2
jw( jw 1)(2 jw 1)
稳定吗?
补画一条半径为无穷大,逆时针方向绕行 90o 的
圆弧,这样可得完整的 0 部分奈氏曲线。
Bode图上的稳定性判据
L)
Im
(-) (+) (-1,j0)
CB
A
Re
)
-
(-)
(+)
N N N 11 0
s
正负穿越的概念
正负穿越
在系统频率特性的Bode图上,在开环对数 频率特性为正值的频率范围内,沿着ω增加 的方向,对数相频特性曲线自下而上穿越- 180°线称为正穿越;反之,沿着ω增加的 方向,对数相频特性曲线自上而下穿越- 180°线为负穿越。
N N N
()
()
() 1
若轨迹终止于(-1,j0) 左侧负轴上,则为半次 穿越
1 () 2
() 1
s
s
Nyquist曲线
例
一个单位反馈系统,开环传递函数为
G(s) K s2 (Ts 1)
试用Nyquist判据判定系统的稳定性。
解 系统的开环幅相曲线如图所示。
Im
(-1,j0)
从Nyquist曲线上看到,曲线顺时 针包围(-1,j0)点一圈, 即N= -1, 而开环传递函数在s右半平面的极 点数P=0,因此闭环特征方程正 Re 实部根的个数
2)(2 j 1) 1 2 1 42
系统是否 稳定?
sNyquist稳定判据
Nyquist稳定判据 定义P为开环传递函数在复平面右侧的极点个数。
闭环系统,当 从-∞变到﹢∞时,在[GH]平
面上系统的开环频率特性逆时针包围(-1,j0 )点N 圈 , 1)若N=P,则该闭环系统稳定 2)若N≠P, 则该闭环系统不稳定,闭环系统在 复平面右侧的根的个数由Z=P-N来确定。