哈工大自动控制原理06自控试题及答案
2006年哈尔滨工程大学416自动控制原理考研真题及详解【圣才出品】

2006年哈尔滨工程大学416自动控制原理考研真题及详解自动控制原理试题 416一、(15分)控制系统的结构图如下:求)(/)(s R s C (化简结构图要有步骤,若用信号流图法要画出信号流图)前向通道,3211G G G P =;412G G P =;回路, 1211H G G L -=; 122412H G H G G L =;2323H G G L -=;3214G G G L -=;415G G L -=;G 1 G 2G 3 H 2H 1G 4--R (s)C (s)+-RCG 1 G 2 G 3 G 4 -H 1 -H 2-1特征式, 41321232214211211G G G G G H G G H H G G G H G G +++-+=∆;;12=∆;4132123221421121413211)()(G G G G G H G G H H G G G H G G G G G G G s R s C +++-++=; 点评:本题可以应用方框图简化计算所求的传递函数,必定有求和点与分支点交换位置,计算过程过于烦琐。
可以应用消元法,参考以下解法。
C G X H G R G X 121111--=;C H G X G X 22122-=;1423X G X G C +=;消去21,X X ,计算闭环传递函数)(/)(s R s C ,由前2个等式得到C H G G H G G G R H G G G G X 121222112121211++-+=;C H G G G H G G R H G G G X 12112211211111+-++=;代入第3式,整理后,得到4132123221421121413211)()(G G G G G H G G H H G G G H G G G G G G G s R s C +++-++=;11=∆G 1 G 2G 3 H 2H 1G 4 --R (s) C (s)+-X 1(s)X 2(s)H 2G 4 H 11/G 3G 4/G 3G 3 G 1 G 2--R (s) C (s)--+4132123221421121413211)()(G G G G G H G G H H G G G H G G G G G G G s R s C +++-++=;二、(20分)设系统如图所示,C (s)-G 1 G 4G 2G 3H 2H 1/G 3G 2G 3G 4H 1/G 3 --R (s) C (s)+ -+-R (s)C (s)(1) 已知G 1(s )的单位阶跃响应为t2e 1--,试求G 1(s );(2) 当21)(1+=s s G ,且)(10)(t t r =时,试求 ① 系统的稳态输出)(∞c ;② 系统的峰值时间p t ,超调量%p σ,及稳态误差ss e 。
自动控制原理题目(含答案)

自动控制原理题目(含答案)自动控制原理题目(含答案)《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量与反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。
7、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H (s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T愈大则系统的快速性愈差。
18、应用频域分析法,穿越频率越大,则对应时域指标t越小,即快速性越好s19最小相位系统是指S右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、补偿校正与复合校正四种。
(完整word版)自动控制原理试卷包含答案

自动控制原理试卷一. 是非题(5分):(1)系统的稳态误差有系统的开环放大倍数k 和类型决定的( );(2)系统的频率特性是系统输入为正弦信号时的输出( );(3)开环传递函数为)0(2>k s k 的单位负反馈系统能跟深速度输入信号( );(4)传递函数中的是有量纲的,其单位为 ( );(5)闭环系统的极点均为稳定的实极点,则阶跃响应是无 调的( );二. 是非题(5分):(1)为了使系统的过度过程比较平稳要求系统的相角裕量大于零( );(2)Bode 图的横坐标是按角频率均匀分度的,按其对数值标产生的( );(3)对于最小相位系统,根据对数幅频特性就能画出相频特性( );(4)单位闭环负反馈系统的开环传递函数为)()()(s D s N s G =,劳斯稳定判据是根据)(s D 的系数判闭环 系统的稳定性( );奈奎斯特稳定判据是根据)(s G 的幅相频率特性曲线判闭环系统的稳定性 ( )。
三. 填空计算题(15分):(1)如图所示:RC 网络,其输出)(t u c 与输入)(t u r 的微分方程描述为 ,假定在零初始条件下,系统的传递函数)(s φ= ,该系统在)(1)(t t u r =作用时,有)(t u c = 。
(2)系统结构如图,该系统是 反馈系统,是 阶系统,是 型系统,若要使系统的放大系数为1,调节时间为0.1秒(取%σ的误差带),0k 应为 ,t k 应为 。
(3)如果单位负反馈系统的开环传递函数是))(()()(b s a s c s k s G +++=,该系统是 阶系统,是 型系统,该系统的稳态位置误差系数为 ,稳态速度误差系数为 ,稳态加速度误差系数为速度误差系数为 。
四. 是非简答题(5分):(1)已知某系统的开环传递函数在右半s 平面的极点数为,试叙述Nyquist 稳定判据的结论。
(2)试叙述系统稳定的充分必要条件。
(3)系统的稳定性不仅与系统结构有关,而且与输入信号有关,该结论是否正确。
哈工大自动控制原理06自控试题及答案
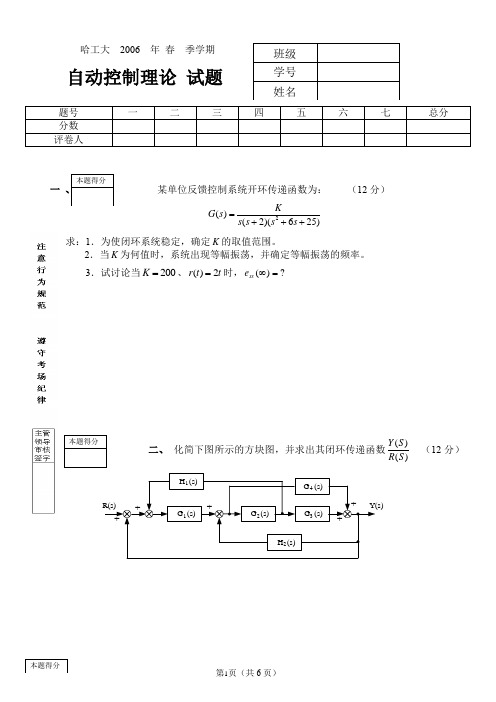
第1页(共6页)哈工大 2006 年 春 季学期自动控制理论 试题一某单位反馈控制系统开环传递函数为: (12分)2()(2)(625)KG s s s s s =+++ 求:1.为使闭环系统稳定,确定K 的取值范围。
2.当K 为何值时,系统出现等幅振荡,并确定等幅振荡的频率。
3.试讨论当200K =、()2r t t =时,?)(=∞ss e二、 化简下图所示的方块图,并求出其闭环传递函数)()(S R S Y (12分)三、系统结构图如下: (12分)求:1、当)(1)(t t r =时,系统的超调量?P σ=,及调节时间?s t =(02.0=∆),2、当输入信号分别为)(1)(t t r =;()r t t =;21()2r t t =时,其()?ss e ∞=四、系统结构图如下:(12分)求:1)试绘出以T 为变量的根轨迹的大致图形。
(如有渐近线;分离点、会合点;出射角、入射角;与虚轴的交点等问题应计算之)2)为使系统稳定,T 的取值范围。
3)系统临界稳定时T 的数值,并指出临界稳定时的振荡频率。
第3页(共6页)技术指标要求:相角稳定裕量:050≥γ;剪切频率:13≥C ω秒-1,=200V K 秒-1,试求?)(=s G C (注:系统的固有特性、校正特性及校正后的特性均应画在给出的对数坐标纸上。
)六、某非线性系统的结构图如下: (8分)-)2)(1(++s s s K)(t r )(t x )(t y )(t C ka其中:1=a ,1k =;试确定系统处于临界稳定状态时,线性部分的?=K 及振荡频率?=ω (提示:死区非线性的描述函数 122()[1(sin 1())]a a a N X k X X Xπ-=-+-) 本题得分第5页(共6页)七、回答下列各问: (12分)1.在下述图中,各控制系统的开环幅相频率特性如图所示,P 为各开环传递函数在s 平面右半部的极点数,试判断各闭环系统的稳定性(如不稳定需指出有几个不稳定的根)。
自动控制理论_哈尔滨工业大学中国大学mooc课后章节答案期末考试题库2023年

自动控制理论_哈尔滨工业大学中国大学mooc课后章节答案期末考试题库2023年1.对于惯性环节【图片】,下列说法错误的是()。
参考答案:其微分方程为。
2.负反馈系统的开环极点为-1、-4(两重极点),开环零点为-2;若该系统具有一对实部为-3.75的共轭复极点,那么该系统的另外一个极点为()。
参考答案:-1.53.某单位负反馈控制系统的开环传递函数为【图片】,若使该系统在单位斜坡信号作用下的稳态误差小于0.2 ,那么K的范围应为()。
参考答案:44.传递函数为【图片】,在阶跃输入下,输出响应的形式为()。
参考答案:单调上升5.系统的开环传递函数是指()。
参考答案:所指定的闭环回路主反馈点断开后,反馈信号和偏差信号之比6.设单位反馈系统的开环传递函数为【图片】,当K由0增大时,闭环系统()。
参考答案:由不稳定到稳定7.控制系统的稳态响应是指【图片】时()。
参考答案:系统对某一输入信号的固定响应8.系统的开环传递函数为【图片】,当增大K时,闭环系统阶跃响应的超调量(),调整时间()。
(调整时间近似取【图片】)参考答案:增加;不变9.已知单位反馈系统的开环传递函数为【图片】,其闭环系统稳定的条件是()。
参考答案:K>1510.控制系统如图所示,若使系统在斜坡输入下的稳态误差为零,【图片】应取为()。
(定义误差e(t)=r(t)-c(t))【图片】参考答案:1/K11.已知单位反馈系统的开环传递函数为【图片】,当输入信号为【图片】时,闭环系统输出的稳态误差为()。
参考答案:0.212.求取控制系统的时域响应的方法有()。
参考答案:求取系统的输出,并求其拉氏反变换_求得其微分方程的通解和特解之和_求得暂态分量和稳态分量之和_求得零输入响应和零状态响应之和13.减小或消除系统稳态误差的方法主要有()。
参考答案:增大系统的开环增益_引入适当的前馈环节_在前向通道中串联积分环节14.如果一个线性系统是稳定,那么()。
《自动控制原理》试题及答案(word版可编辑修改)

《自动控制原理》试题及答案(word版可编辑修改)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(《自动控制原理》试题及答案(word版可编辑修改))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为《自动控制原理》试题及答案(word版可编辑修改)的全部内容。
《自动控制原理》试题及答案1、若某串联校正装置的传递函数为(10s+1)/(100s+1),则该校正装置属于(B )。
3分2、在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是(A)3分3、在系统中串联PD调节器,以下那一种说法是错误的(D) 3分A是一种相位超前校正装置B能影响系统开环幅频特性的高频段C使系统的稳定性能得到改善D使系统的稳态精度得到改善4、用超前校正装置改善系统时,主要是利用超前校正装置的(A )3分5、I型系统开环对数幅频特性的低频段斜率为(B )9分6、设微分环节的频率特性为G(jω),当频率ω从0变化至∞时,其极坐标平面上的奈氏曲线是() 9分7、关于线性系统稳定性的判定,下列观点正确的是 ( )。
9分8、若两个系统的根轨迹相同,则有相同的( ) 9分9、关于系统零极点位置对系统性能的影响,下列观点中正确的是() 7分10、高阶系统的主导闭环极点越靠近虚轴,则系统的( ) 2分11、若某最小相位系统的相角裕度γ〉0,则下列说法正确的是( )。
2分12、某环节的传递函数是G(s)=5s+3+2/s,则该环节可看成由(D )环节组成。
2分13、主导极点的特点是(A )2分14、设积分环节的传递函数为G(s)=K/s,则其频率特性幅值A(ω)=()2分15、某环节的传递函数为K/(Ts+1),它的对数幅频率特性随K值增加而()2分16、某系统的传递函数是G(s)=1/(2s+1),则该可看成由(C )环节串联而成2分17、若系统的开环传递函数在s右半平面上没有零点和极点,则该系统称作(B)2分18、某校正环节传递函数G(s)=(100s+1)/(10s+1),则其频率特性的奈氏图终点坐标为( D)2分19、一般为使系统有较好的稳定性,希望相位裕量为( C)2分20、最小相位系统的开环增益越大,其()2分21、一阶微分环节G(s)=1+Ts,当频率ω=1/T时,则相频特性∠G(jω)为( )2分22、ω从0变化到+∞时,延迟环节频率特性极坐标图为( )2分23、开环传递函数为G(s)H(s)=(s+3)/(s+2)(s+5),则实轴上的根轨迹为(B)2分24、开环传递函数为G(s)H(s)=K/(s*s*s(s+4)),则实轴上的根轨迹为( )2分25、某单位反馈系统的开环传递函数为:G(s)=K/(s(s+1)(s+5)),当k=(C )时,闭环系统临界稳定.2分26、若系统增加合适的开环零点,则下列说法不正确的是(B ) 2分27、当二阶系统的根分布在根平面的虚轴上时,系统的阻尼比为(B)3分28、控制系统的稳态误差ess反映了系统的(A)2分29、当二阶系统特征方程的根为具有负实部的复数根时,系统的阻尼比为(C)3分30、二阶系统当0<ζ〈1时,如果增加ζ,则输出响应的最大超调量将(B )3分。
自动控制原理试卷含答案4套完整(免费)
课程名称: 自动控制理论 (A/B 卷 闭卷)试卷A一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
哈工大-自动控制原理试题库
s(s 3)2
1、绘制该系统以根轨迹增益 Kr 为变量的根轨迹(求出:渐近线、分离点、 与虚轴的交点等);(8 分)
2、确定使系统满足 0 1的开环增益 K 的取值范围。(7 分)
六、(共 22 分)某最小相位系统的开环对数幅频特性曲线 L0 () 如图 5 所示:
中采用
;在频域分析中采用
。
4、传递函数是指在 初始条件下、线性定常控制系统的
与
之比。
5、设系统的开环传递函数为
K ( s 1) s2 (Ts 1)
,则其开环幅频特性
为
,相频特性为
。
6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅
值 穿 越 频 率 c 对 应 时 域 性 能 指 标
三、(8 分)写出下图所示系统的传递函数 C(s) (结构图化简,梅逊公式均
R(s)
可)。
7
四、(共 20 分)设系统闭环传递函数
(s)
C(s) R(s)
T
2s2
1 2Ts
1
,试求:
1、 0.2 ;T 0.08s ; 0.8 ;T 0.08s 时单位阶跃响应的超调量 % 、
调节时间 ts 及峰值时间 t p 。(7 分) 2、 0.4 ;T 0.04s 和 0.4 ;T 0.16s 时单位阶跃响应的超调量 % 、
A、 K (2 s) s(s 1)
B
、
K (s 1) s(s 5)
C
、K s(s2-s 1)
D、 K (1 s) s(2 s)
8、若系统增加合适的开环零点,则下列说法不正确的是 ( )。
哈工大自动化试题及答案
哈工大自动化试题及答案一、选择题(每题2分,共20分)1. 自动化系统中,下列哪个不是控制系统的基本组成部分?A. 传感器B. 执行器C. 变频器D. 操作员答案:D2. 在自动化技术中,PID控制器的“P”代表什么?A. 比例(Proportional)B. 积分(Integral)C. 微分(Derivative)D. 优先级(Priority)答案:A3. 自动化设备在运行过程中,通常需要进行哪些类型的维护?A. 定期维护B. 预防性维护C. 应急维护D. 所有以上选项答案:D4. 在自动化系统中,传感器的主要作用是什么?A. 执行操作B. 检测物理量C. 供电D. 数据存储答案:B5. 以下哪个不是自动化系统中常用的输入设备?A. 按钮B. 触摸屏C. 打印机D. 扫描仪答案:C6. 自动化系统中的执行器通常用于实现什么功能?A. 数据处理B. 驱动机械部件C. 存储数据D. 显示信息答案:B7. 在自动化技术中,什么是开环控制系统?A. 系统没有反馈环节B. 系统有反馈环节C. 系统使用PID控制器D. 系统使用变频驱动器答案:A8. 自动化系统中的PLC代表什么?A. 可编程逻辑控制器B. 电源线控制器C. 个人学习计算机D. 打印逻辑控制器答案:A9. 在自动化系统中,以下哪个设备通常用于数据采集?A. 变频器B. 传感器C. 执行器D. 显示器答案:B10. 自动化系统中的SCADA系统主要用于什么?A. 视频监控B. 数据采集与监控C. 机器学习D. 网络通信答案:B二、填空题(每题2分,共20分)11. 自动化系统中的DCS指的是_________控制系统。
答案:分布式控制系统12. 在自动化技术中,闭环控制系统也被称为_________控制系统。
答案:反馈13. 自动化设备的性能可以通过其_________和稳定性来衡量。
答案:响应速度14. 一个典型的自动化生产线包括输入、处理、_________和输出四个基本环节。
《自动控制原理》第六章习题答案
119第六章习题及解答6-1 试求下列函数的z 变换T ta t e =)()1(()()223e t t e t=- 21)()3(ss s E +=)2)(1(3)()4(+++=s s s s s E解 (1)∑∞=---=-==0111)(n nnaz z azza z E(2)[]322)1()1(-+=z z z T t Z由移位定理:[]333323333232)()()1()1(TTTTTTte z ez zeT ze ze zeT et Z -----+=-+=(3)22111)(ssss s E +=+=2)1(1)(-+-=z Tz z z z E (4)21)(210++++=s c s c sc s E21)1(3lim212)2(3lim23)2)(1(3lim221100=++=-=-=++==+++=-→-→→s s s c s s s c s s s c s s s2211223+++-=s s s)(22)1(23)(2TT e z ze z z z z z E ---+---=6-2 试分别用部分分式法、幂级数法和反演积分法求下列函数的z 反变换。
120()()()()11012E z z z z =-- 211213)()2(---+-+-=z zz z E 解 (1))2)(1(10)(--=z z zz E① 部分分式法)12(10210110)()2(10)1(10)(210110)2)(1(10)(-=⨯+⨯-=-+--=-+--=---=nnnT e z zz z z E z z z z zz E② 幂级数法:用长除法可得+-+-+-=+++=+-=--=---)3(70)2(30)(10)(7030102310)2)(1(10)(*3212T t T t T t t e z z z z z z z z z z E δδδ③ 反演积分法[][])()12(10)()12(10210110)(210110lim)(Re 10210lim)(Re 0*221111nT t t e nT e z zzz E s z z z z E s n nnnnnz z n nz z n --=-=⨯+⨯-=⨯=-=⋅-=-=⋅∑∞=→→-→→-δ(2) 2221)1()13(12)13(213)(-+-=+-+-=+-+-=--z z z z z z z zz zz E① 部分分式法∑∑∞=∞=---=-⎥⎦⎤⎢⎣⎡--=⨯--=----=----=--=0*222)()32()(32)()(132)(13)1(2)(13)1(2)1(31)(n n nT t n nT t nT Tt e t t Tt e z z z z z E z z z z zz E δδ121② 幂级数法:用长除法可得--------=-----=+-+-=---)3(9)2(7)(5)(3)(9753123)(*32122T t T t T t t t e zzzz z z z z E δδδδ③ 反演积分法[][]12111)3(lim!11)(Re )(-→→-⋅+-=⋅=n s z n zz zdzd z z E s nT e[]32)1(3lim 11--=++-=-→n nzz n n ns∑∞=---=*)()32()(n nT t n t e δ6-3 试确定下列函数的终值()()()11112E z Tzz =--- )208.0416.0)(1(792.0)()2(22+--=z z z zz E解 (1)∞=--=---→21111)1()1(lim zTz z e z ss(2)1208.0416.01792.0208.0416.0792.0lim)()1(lim 2211=+-=+-=-=→→z z zz E z e z z ss6-4 已知差分方程为c k c k c k ()()()-+++=4120初始条件:c(0)=0,c(1)=1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈工大2006年春季学期
自动控制理论试题
一、某
单位反馈控制系统开环传递函数为:(12分)
2
()(2)(625)
K
G s s s s s =
+++ 求:1.为使闭环系统稳定,确定K 的取值范围。
2.当K 为何值时,系统出现等幅振荡,并确定等幅振荡的频率。
3.试讨论当200K =、()2r t t =时,?)(=∞ss e
二、化简下图所示的方块图,并求出其闭环传递函数
)
()
(S R S Y (
12分)
求:1、当)(1)(t t r =时,系统的超调量?P σ=,及调节时间?s t =(02.0=∆),
2、当输入信号分别为)(1)(t t r =;()r t t =;21
()2
r t t =时,其()?ss e ∞=
四、系统结构图如下:(12分)
求:1)试绘出以T 为变量的根轨迹的大致图形。
(如有渐近线;
分离点、会合点;出射角、入射角;
与虚轴的交点等问题应计算之)
2)为使系统稳定,T 的取值范围。
3)系统临界稳定时T 的数值,并指出临界稳定时的振荡频率。
技术指标要求:相角稳定裕量:050≥γ;剪切频率:13≥C ω秒-1,=200V K 秒-1,试求?)(=s G C (注:系统的固有特性、校正特性及校正后的特性均应画在给出的对数坐标纸上。
)
六、某非线性系统的结构图如下:(8分)
其中:1
=a ,1k =;试确定系统处于临界稳定状态时,线性部分的?=K 及振荡频率?=ω
(
提示:死区非线性的描述函数1
2
()[1(sin a N X k X π
-=-
+)
七、回答下列各问:(12分)
1.在下述图中,各控制系统的开环幅相频率特性如图所示,P 为各开环传递函数在s 平面右半部的极点数,试判断各闭环系统的稳定性(如不稳定需指出有几个不稳定的根)。
(4分)
P =
P=0
P=1
P=0
2.图示电路的传递函数可为)a 亦可为)b ,何者对?请说明原因。
(2分)
( )
)a 2
12123()1()()1c r U s U s TT s T T T s =++++)b 12
()1
()(1)(1)c r U s U s T s T s =++ 其中:1
11T R C =222T R C =312T R C =
(提示:
()1(r s RCs
Ts +)
3.某单位反馈控制系统的开环传递函数为()(0.21)
K
G s s s =
+,其频率特性如图所示,试求()r t t =时,
()?ss e ∞=(需给出计算过程)(1分)
4.结合所学自动控制理论知识,写出五句内容正确的话。
(可以是定义、概念;可以是结论;可以是C ()r t c u。