巨型浮吊起重船稳性安全的解耦控制方法
浮吊式起重机控制相关技术问题解析总结.doc

浮吊式起重机控制的相关技术问题分析1导言浮式起重机是重钢公司的瓶颈设备,是矿石质料进口通道的咽喉,该设备功用的好坏直接联系到公司的生计与开展,是全公司要改造的要点要害设备。
因为该设备有无足轻重的作用,在技能改造中既要领先,更要把安全牢靠摆在头号方位,因而在描绘中领先科技设备和操控技能成熟度是第一位的。
浮式起重机是一个杂乱的体系,它的操控触及很多工程技能疑问,是多技能体系运用的复合体。
为了改进浮吊功用,确保该体系在高频率、大运量的状况下正常作业,需对该浮吊的操控体系及相应的机械传动有些进行技能改造,改造后的操控体系应能习气设备年起卸矿石200 万吨的作业状况。
操控体系改造触及起升及抓斗闭合电机(2 ×2 ×110kW) 、旋转组织电机(2 ×2×30kW) 以及变幅组织电机(2 ×1×30kW) 合计 10 台电机的驱动及调速,完成牢靠的安全联锁和防误操作功用以及联合动作操控体系,还触及联动操作台的改造。
驱动体系能完成大规模的平稳调速及较快的速度晋升功用 (从发动到高速 2.5s) ,一起处置抓斗闭合与晋升电机间的受力平衡疑问,速度调节能习气抓斗和吊装两种作业方法。
操控体系要具有较高的安全牢靠性及齐备的防误操作功用;联动操作台要操作简略易把握,靠近原操作习气,且有较高的运用寿数,习气频频操作 ;整个体系能在高温高粉尘的恶劣环境下正常作业,习气正负百分之十的电网电压动摇。
因而,在体系功用完成上,有必定难度,以下就有关技能完成疑问作些评论。
2体系总体描绘思考(1)驱动体系描绘及选型为进步浮吊作业功率,既要进步驱动体系的速度呼应,又要削减毛病检修及惯例检修的周期和频率,选用变频调速方法能够极好的满意浮吊设备关于驱动体系的需求。
变频器有很宽的调速规模,能够设定加减速时刻 ;杰出的低速力矩特性使得电动机在发动和加快时能够取得大并且滑润的加快度 ;制动单元的接入又使得电动机在减速和泊车时能够取得满足的制动力矩。
浮吊(起重船)安全操作规程
浮动吊机安全操作规程
一、浮吊司机应具备特种作业人员操作证方可上岗操作。
二、浮吊司机在吊重作业前,应自觉遵守下列规定:
2.1检查卷扬机的制动系统是否灵活可靠,运转是否正常;
2.2检查钢丝绳与所起吊的重物是否安全可靠;所使用的钢丝绳是否有断丝、打结、损坏等现象;
2.3检查吊钩,滑轮、各受力支腿是否安全可靠;
2.4检查运转盘、吊臂伸缩、升降是否正常;
2.5正确判断重物的实际重量、高度、距离、半径范围后参照起重特性曲线表方可进行动作。
(注:在判断重物重量有异议时,应与有关人员商量)
2.6起吊重物时应设专人指挥、管理人员不能擅自离开;
2.7风级超过规定、水浪对浮吊有影响时应停止作业;
2.8配合吊物的有关人员应技术熟练、尽职尽责。
绑扎物体应牢固、使用的绳具应安全可靠。
附注:
在海上吊装过程中,风、浪、流对吊装影响较大,吊装作业时,必须谨慎对待。
施工前,必须做好索具的检查工作,坚决更换有损伤的索具,千万不可为降低成本而使用老化索具并引发重大事故。
浮吊性能是制定吊装方案的关键和前提,施工前做好浮吊参数的试验和收集。
设立安全标志:建立起船舶勘设安全标志的管理机制,落实船岸各方的责任,并将其纳入劳动安全管理制度的重要内容,规范和完善对它的管理。
应该有警告标志、禁止标志、命令标志等作业场所的安全标志,例如:“当心坠落”、“当心吊物”、“必须戴安全帽”、“必须戴防护眼镜”等。
加强对船舶勘设标志工作的日常检查工作。
安全标志的安全色与对比色明度要高、反差要大,要有明显的辨别度,图角、边框、衬底所规定的安全色、对比色要画全。
11700t多用途单舱大开口重吊船稳性分析
第46卷第4期2017年8月船海工程SHIP & OCEAN ENGINEERING Vol. 46 No. 4 Aug. 2017DOI: 10. 3963/j. issn. 1671-7953.2017.04. Oil11 700 t多用途单舱大开口重吊船稳性分析左文安\田明琦\张延辉2(1.中集船舶海洋工程设计研究院有限公司,上海201206;2.海洋石油工程股份有限公司,上海200335)摘要:针对11 700 t多用途单舱大开口重吊船存在的货舱开口大,横舱壁少,船舶自身的压载水调节无 法满足最大联吊时规范稳性衡准要求等问题。
采用NAPA软件对破舱稳性、港口吊装稳性及吊物丢失稳性等 进行分析,论证设置浮箱装置对稳性的作用。
结果表明,本船满足相关规范对稳性的强制要求,设置平衡浮箱 是改善稳性及提高调载效率的有效方法。
关键词:重吊船;稳性浮箱;单舱大开口;吊重丢失中图分类号:U661.2 文献标志码:A 文章编号:1671-7953(2017)04-0050-06重吊船属于多用途船中的一类,配置有超强 起重能力的吊机,可用于重大件、集装箱及杂货的 吊装运输。
该类船具有单舱大开口,最大单一货 舱装载可达上万t,开口长度达两柱间长的80%左右。
一般在同舷侧装有2台重吊,可联吊上千t 货物[1_2]。
货舱区采用双壳结构,双层底及两舷侧 布置压载水舱,同时采用浮筒装置抵抗吊装产生 的倾覆弯矩,保证吊装时的稳性要求。
图1为一 艘正在载货航行的多用途船。
由于其是单舱又是 大开口,因此设计的难度和复杂性相比一般的集 装箱要高,稳性问题较为复杂。
图1某多用途船在航行中11 700 t多用途重吊船左舷配备2台450 t克 令吊,该船主要技术参数为:总长143 m;垂线间长135.5 m;型宽24.4 m;型深14 m;设计吃水6.8 m;设计航速16. 2 kn;载重量11 700 t;货舱舱容19 700 m3。
浮吊船吊机PLC控制系统接入船舶网络方案设计
浮吊船吊机PLC控制系统接入船舶网络方案设计摘要:工程船舶中吊机和生活区都是分布在船舶的两端,吊机的控制系统由于条件限制很难接入到生活区的船舶网络。
文章通过分析船舶网络资源和各种网络连接方式,介绍一种适用于工程船舶的吊机接入船舶网络设计方案。
关键词:浮吊船;PLC;控制系统;网络浮吊船(Floating crane),又称起重船,是一种载有起重机的浮动平台,一般用于海洋工程,进行水上起重、吊装作业。
浮吊船一般分成两大类,一类是起重臂能够360度回转的全回转式浮吊船,另一类是吊臂固定在船上的一个方向的固定式浮吊船。
通常为实现对吊机的监控,会在吊机上配置上位机。
如果将吊机的控制系统接入船舶网络,就可以从生活区甚至陆地都可以对吊机运行状态进行监控,应用前景广泛。
1,浮吊船吊机控制系统概况在浮吊船中,一般使用PLC(可编程逻辑控制器)作为控制系统,随着PLC技术、计算机技术以及网络技术的不断发展,这种控制方式简单可靠。
可以很方便的将PLC控制系统和计算机网络连接在一起,在任意计算机中实时监控吊机的运行状态和各种运转参数。
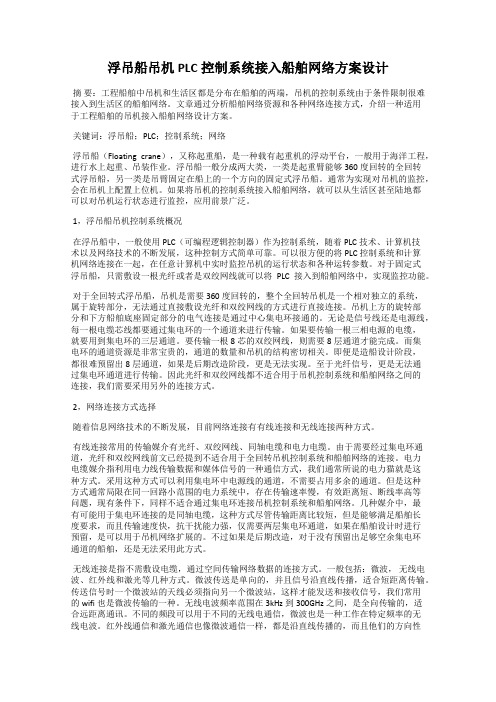
对于固定式浮吊船,只需敷设一根光纤或者是双绞网线就可以将PLC接入到船舶网络中,实现监控功能。
对于全回转式浮吊船,吊机是需要360度回转的,整个全回转吊机是一个相对独立的系统,属于旋转部分,无法通过直接敷设光纤和双绞网线的方式进行直接连接。
吊机上方的旋转部分和下方船舶底座固定部分的电气连接是通过中心集电环接通的。
无论是信号线还是电源线,每一根电缆芯线都要通过集电环的一个通道来进行传输。
如果要传输一根三相电源的电缆,就要用到集电环的三层通道。
要传输一根8芯的双绞网线,则需要8层通道才能完成。
而集电环的通道资源是非常宝贵的,通道的数量和吊机的结构密切相关。
即便是造船设计阶段,都很难预留出8层通道,如果是后期改造阶段,更是无法实现。
至于光纤信号,更是无法通过集电环通道进行传输。
因此光纤和双绞网线都不适合用于吊机控制系统和船舶网络之间的连接,我们需要采用另外的连接方式。
海上起重机的控制系统及其操作方法

海上起重机的控制系统及其操作方法海上起重机作为重要的海上运输装备,具有极高的使用价值和重要作用。
当海上需要进行货物装卸、海底管道铺设或海上工程建设时,海上起重机就成了不可或缺的工具。
而作为一种高度自动化的装备,其控制系统占据着非常重要的地位。
本文将详细探讨海上起重机的控制系统及其操作方法,希望能给读者带来启示。
一、海上起重机的控制系统概述海上起重机控制系统是指控制起重机各个部件运行的专用设备和程序。
其作用是控制起重机的电动机、传动装置、液压系统、机械拉杆、防倾翻、防撞保护、重物荷载以及操作人员等要素的协调工作,以实现海上起重机运行和操纵。
海上起重机的控制系统主要分为三个部分:发动机(即电机),控制器和控制柜。
其中,电机驱动起重机的运动,控制器提供控制信号,控制柜则是控制整个系统的终端设备。
二、海上起重机控制系统的工作原理(一) PLC控制PLC控制是海上起重机最重要的控制手段之一。
PLC (Programmable Logic Controller)即可编程逻辑控制器,是一种由数字和模拟输入输出模块、运行控制程序、存储记忆单元、CPU、通讯接口等组成的工业控制设备。
PLC控制器内部存储着一种称为逻辑程序的程序集,在逻辑程序指导下,PLC应用电气设备与工具协调工作。
PLC的优点是解除人机操作员对于整个过程的手工操作控制,实现自动化集成控制。
(二) 磁暴控制磁暴控制技术是利用电磁力作用于导电锻件以实现机械化运动的技术。
它通过对锻件导电体内的电荷调节,以使其对磁场产生的作用产生瞬时性的反向电流,从而实现平衡和运动控制。
磁暴控制技术是一种新型的综合控制技术,具有多重优点,如控制精度高、反应速度快、耗能少等。
(三) 直接电控制海上起重机的大多数控制任务都是通过电机的电控制方式来达到,直接电控制是此种方式中的一种。
它通过电机的正反转和速度的调节来实现海上起重机的运作。
三、海上起重机控制系统的操作方法(一) 手动控制手动控制是按钮、开关、摇杆和脚踏等设备对海上起重机的控制方式。
保证船舶适度的稳性的措施
保证船舶适度的稳性的措施船舶稳性是指船舶在静态和动态条件下保持平衡和稳定的能力。
这是船舶设计的重要因素之一。
保证船舶适度的稳性对于船舶的安全和航行效率至关重要。
以下是保证船舶适度的稳性的措施。
1. 船舶操作船舶稳性与船舶操作密切相关。
船舶在航行时要合理控制舵,控制货物的位置和负载等,以保证船舶适度的稳性。
船员应该经过专业培训,有足够的经验和技能来操作船舶。
2. 负载计算负载的计算对于船舶的稳性至关重要。
在运输货物时,必须确保船舶的总载重不超过其设计吨位。
船舶在装载货物时,船舶的设计要求必须被考虑在内。
此外,货物应该被合理地分配在船舶上,避免船舶重心过高或过低,从而影响船舶的稳性。
3. 转向惯性转向惯性是指船舶在转向过程中的惯性力。
转向惯性会对船舶的稳性产生影响。
解决这个问题的方法是通过良好的船舶设计和建造,使船舶具有适当的弯曲和剪切,以平衡转向惯性的力量。
4. 稳性试验船舶稳性试验是为了确定船舶的稳性特征。
这个试验可以帮助设计师和船舶经营者确保船舶适度的稳性。
稳性试验包括静态稳性试验和动态稳性试验。
其中静态稳性试验是在船舶处于稳定状态,不受外力干扰的情况下进行的。
动态稳性试验是为了检查船舶在波浪中的动态稳定性能。
5. 船舶维护船舶维护是保证船舶适度的稳性的关键。
船舶的船体结构,船舶设备和船舶的各个部分经常需要进行定期检查和维护。
维护可以预防故障和损坏,并在必要时进行修理或更换。
船舶的设备维护可以确保设备正常工作,以避免在运行过程中出现不良后果。
6. 泊船泊船是指停靠在码头或锚地。
在停靠时,需要考虑船舶与码头或锚的角度和距离。
船舶停靠时必须采取适当的措施以确保船舶适度的稳定。
必要时,可以使用锚或辅助锚来保持船舶的稳定。
7. 静荷库静荷库是一种可用于提高船舶稳性的设备。
静荷库可以通过吸收和分散液体负载的作用,可以控制船舶的稳定性和减少船舶的颠簸和摆动。
以上是保证船舶适度的稳性的措施。
这些措施对于确保船舶的安全和航行效率至关重要。
5000t起重船稳性衡准研究及NAPA宏命令应用

文献标志码:A
Stability of 5 000 t Floating Crane Barge with the Application of NAPA Macro
YAN Yan $ WANG Wenjie
(StateKeyLaboratoryofNavigationandSafetyTechnology$ShanghaiShipand ShippingResearchWnstitute$Shanghai200135$China)
规则(2011)》门校核。
该船属于工程船,其完整稳性衡准通常由各船级社自行规定 ,船宽与吃水的比值B/〃通常大于2.5,横
摇角按照国际海事组织(International Maritime Organization, IMO)《2008 IS CODE》20中给出的计算公式
计算所得结果
大,最大复原力臂下的对应角
阎岩! 王文杰
(上海船舶运输科学研究所航运技术与安全国家重点实验室,上海200135)
摘 要:对入级中国船级社的某5 000 t浮式非自航起重船在作业、避风和拖航状态下的稳性衡准的不同点进行分
析,并按照法规的要求分别进行校核。由于国际海事组织《2008 ISCODE》中给出的船舶横摇角计算公式在拖航工
1。
0
5
10
15^- 20
25
30
35
40
45
50
55
60
图1 5 000 t起重船总布置图
2起重船稳性衡准分析
2.1起重船在作业状态下的稳性衡准分析 《国内航行海船法定检验技术规则(2011)》第7章第3. 10. 6节规定起重船作业状态稳性应满足以下
求。 1)初稳性高度?gm满足
吊车 吊钩 稳定控制算法

吊车吊钩稳定控制算法吊车(或称起重机)是一种用于提升、搬运和放置重物的机械设备,而吊钩是吊车的重要组成部分,用于连接和搬运货物。
在吊运过程中,稳定控制算法对于确保吊钩悬吊物体的平稳、安全运行至关重要。
以下是关于吊车吊钩稳定控制算法的基本介绍:一、吊车吊钩的稳定控制算法概述1.1 目标与挑战吊车吊钩的稳定控制算法的主要目标是确保在悬吊和运动过程中吊钩携带的物体能够保持平稳、不摇晃,同时避免悬吊物体的旋转或倾斜。
这既关系到吊钩自身的结构稳定性,也关系到整个吊车系统的工作效率和安全性。
面临的挑战包括悬吊物体的不确定性、风力的影响、吊钩运动时的动力学特性等。
因此,吊车吊钩的稳定控制算法需要考虑这些复杂的因素,以提供可靠、高效、安全的悬吊操作。
1.2 控制要素稳定控制算法通常需要考虑以下控制要素:吊钩位置控制:控制吊钩的位置,确保悬吊物体的高度和位置稳定。
悬吊物体的摆动控制:通过调整吊钩和悬吊物体的相对位置,减小或消除悬吊物体的摆动。
动力学控制:考虑吊车运动和吊钩下悬吊物体的动力学特性,以实现平稳运动。
外部环境因素补偿:考虑外部因素,如风力等,通过传感器监测并实施补偿措施。
二、吊车吊钩稳定控制算法的实现方法2.1 传感器技术应用吊钩的稳定控制通常离不开先进的传感器技术,如:载荷传感器:用于测量悬吊物体的质量,帮助调整吊钩位置和控制悬吊物体的平稳悬吊。
倾斜传感器:用于检测悬吊物体的倾斜角度,以便调整吊钩位置,防止物体的旋转或倾斜。
位置传感器:用于测量吊钩的位置,实现位置控制。
2.2 控制算法吊车吊钩的稳定控制算法可以采用不同的方法,如:PID控制:使用比例、积分、微分三个控制参数,根据系统反馈调整吊钩的位置和运动。
模型预测控制(MPC):基于对系统动力学的建模,通过预测未来一定时间内的系统行为,进行优化控制。
强化学习算法:通过机器学习的方式,让系统根据环境反馈不断优化控制策略,适应各种复杂情境。
三、吊车吊钩稳定控制算法的应用领域3.1 建筑施工在建筑施工中,吊车吊钩用于吊装建筑材料、设备等,稳定控制算法的应用可以提高施工效率,降低事故风险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t d t e t a d lo rn e s1 h d pien u a ewok d c u l gfe b c o — u e mah mai lmo e fca ev se .T ea a tv e r n t r e o pi e d a kc n c l n to to a e n a pid t e l et ed c u ln fse n n u f gmo e n so rn rlmeh d h sb e p l or ai h e o p ig o lwi ga d lfi v me t fca e e z n
C nቤተ መጻሕፍቲ ባይዱ 】 O to
O 引言
起 重船 不仅 是港 口船 舶 装卸 的重 要 工 具 , 而
且在 海 上作 业 、 造船 工程 、 梁 建 筑 、 下救 捞 以 桥 水
物 系统 的动 力响 应 问题 有耦合 关 系存在 。 综 合人 工神经 网络 在有 限的 时间 内以任 意 精 度 迫 近 任 意 函 数 、 态 建 模 和 系 统 控 制 。经 过 动
Ab ta t I iw fn n l e rsr n o p ig p o lmso c ri g i o sig, se n sr c n ve o o —i a to g c u l r b e c u rn n h it n n n lwi g a d l f n v me t fte lf n r rlt e t h ulo in o tn rn e s l hs n u f g mo e nso h i i g am eai o t e h l fga tf ai g ca e v se ,t i i t v l p p rp t o wad an ua ewok d c u ln o to tae y b sa ls i g mo e n t - a e u sfr r e r ln t r e o p i g c n rlsrtg y et bihn v me tat i
及锚泊定位 电机 , 将起重船起重过程 的船 舶重心控 制在稳定 区域 内 , 而使起重船 的操控 安全高 从
效 。仿真结果表明 , 起重机 的回转和变幅运动的动态解耦控制效果 良好。 关键词 起重船 ; 稳心 ; 耦控制 ; 解 神经网络 ; 反馈控 制
中 图分 类 号 :M3 12 文 献 标 识 码 : 文章 编 号 : 0 -2 1 2 1 )30 1 - T 0. A 1 87 8 ( 02 0 -040 0 4
及 各种 海洋 工程 中均具 有广泛 的 应用 。起重 船在
第卷 总1 (P SN ROE C IMCN) 第4 ( ) 4 薯6 7 第期 7 6 L I—OFL TC AHE E OO一 E R I X P
I爆'机 ‘I1 万朱龟 j
巨型浮 吊起重船稳性安全 的解耦控制方法 木
施振华 , 卫前 , 张 李 华
青岛远 洋船 员职业学院, 山东青岛(60 1 26 7 )
De o pl n r lM e ho o t b lt n a e y o a tFl a i g Cr ne Ve s l c u i Co t o t d f r S a iiy a d S f t f Gi n o tn a s e ng
S iZh n u h e h a,Zh n ii n,a d L a a g Weqa n iHu
摘 要 针 对巨型起 重船起 重臂相对船体 进行起 吊 、 回转 、 幅运 动存在非线 性强耦 合等 问 变 题, 在建 立了起重船运动姿态数学模 型的基础 上 , 出一种神 经网络解 耦控制 策略 。应 用神经 网 提
络 自适应解耦反馈控制方法 , 实现起 重机 回转 、 变幅 的解耦 , 最终控 制起 吊执 行 电机 、 船舶 压载泵
a d fn l o to h i i g e e uie moo ,s i als u n oig p sto tr n a y c nr lt e l n x c t tr h p b a tp mp a d mo rn o i n moo . i l t f v l i T e g a i e tro r n e s li i ig p o e s i c nr l d wi i tbe rgo h r vt c n e fca e v se n l n rc s s o tol t n a sa l e in,S h t y t f e h O ta t e v se a ec n rle aey a d ef ciey h i lto e u ts o h tt ed n mi h e s lc n b o told sf l n fe t l .T esmuain rs l h wsta h y a c v d c u l g c n rlo r n n se n n u f g mo e nsh sg o fe t e o pi o to fc a e i lwig a d lfi v me t a o d efc. n n Ke r s Cr n e s l sa ii e tr d c u ln o to ; e r ewok;e d a k y wo d a e v s e ; tb l y c n e ; e o p i g c nr l n u a n t r fe b c t l