第六章 6-4 6-5
第六章 图论方法

第八章图论方法§1 图论中图的概念在人们从事的各种活动中,为了反映事物之间的关系,常在纸上用点和线画出各种各样的示意图。
例如,为了反映某地区的铁路交通、公路网分布情况,画出铁路、公路交通图。
在这些图中以点表示城镇,用点与点之间的连线表示城镇之间的铁路或公路的沟通情况。
诸如此类的图还有电缆线分布图、供水道及下水道分布图、航空线图等等。
再如,在一场有5支球队参加的球类比赛中,比赛情况也可以用图表示出来,如图6-1,我们用点代表各个球队,某两个队比赛过一次,就在两个点之间画一条箭线。
从图中可以看出A队与其他各队都比赛过,只有一场败给C 队。
而B队和E队各比赛过两场,成绩都是一胜一负,等等。
图6-1从上述例子中可以看出,图的最基本要素是:点、以及点与点之间的一些连线。
通常用点表示我们所要研究的对象(如城市、运动队、状态等等),用线表示研究对象间的某种特定关系(如两个城市之间有铁路,两个运动队之间已经比赛过等)。
因此可以说,图是反映对象之间关系的一种工具。
如果两个对象之间有某种特定关系,那么就用一条线连接这两个点。
必须指出:上述图中点的相对位置如何,点与点之间连线的长短曲直,对于反映研究对象之间的关系并不很重要,因此,图论中的图与几何图、工程图本质上是不同的。
另外在许多情况下,我们要研究的“关系”只用一条线反映还是不够完全。
比如说比赛,我们关心的如果不只是两个队是否比赛过,还要了解比赛的胜负情况,我们可以用一条箭线(有向线)来表示,如果A队胜了B队,就表示为A→B。
如图6-1所示,从图中可以看出A队三胜一负,D队三场全负等。
类似的情况在生产和生活中也是常见的,例如交通运输中的“单行线”、部门之间的领导与被领导关系、一项生产活动中各工序之间的先后次序关系等等。
图论中把不带箭头的连线叫做边,把带箭头的连线叫做弧。
如果一个图是由点和边所构成的,则称之为无向图,记作G=(V,E),其中V表示图G中的所有点组成的点集合,E表示图G中所有边组成的边集合。
(完整版)第六章儿童语言的发展

第六章儿童语言的发展基础知识:1、语言产生的准备;语言理解的准备。
2、语音的发展;词义的发展。
3、句子的发展;语言技能的发展.基本理论:1、环境论.2、先天决定论.3、环境与主体相互作用论。
基本技能:1、掌握语言产生的准备、语言理解的准备、语音的发展、词义的发展.2、学会掌握句子的发展、语言技能的发展、环境与主体相互作用论。
第六章儿童语言的发展教学目标与要求:本章是儿童发展心理学的主要内容之一。
儿童是如何掌握如此复杂的语言结构和语用技能的,对于该问题的了解,可以给我们提供很多珍贵资料,如思维与语言的关系问题、儿童语言讲稿矣教材编写等方面提供很多帮助。
通过教学,使学生了解儿童获得语言的基本规律和特征,例如儿童年龄同语言发展的关系,儿童思维能力和语言发展的关系,儿童环境和语言发展的关系等。
再次基础上进一步学习儿童语言获得理论。
教学主要:以讲授和自学相结合。
儿童语言发展又称语言获得,指的是儿童对母语的产生和理解能力的获得。
主要指口头语言中的说话和听话。
言语是双向的活动过程,包括对语言的接受和发出.但是在儿童言语活动发生发展的过程中,两种过程并不完全是同步的,感知和理解语言先于语言表达的发生发展。
换句话说,儿童语音知觉发生发展在先,正确语音发生发展于后.语言发展是一个复杂的过程,所有生理发育正常的儿童都能在出生后四至五年内未经任何正式训练而顺利地获得听、说母语的能力,其发展的速度是其他复杂的心理过程和心理特征所不能比拟的。
研究儿童语言发展的理论意义和实际意义为:1、通过对儿童语言获得的研究可以为儿童心理发展的基本理论提供依据,为思维和语言关系这个理论问题提供资料;2、语言发展研究的结果还可为幼儿语言教材的编写和语言教学提供依据,并可用作诊断儿童个体语言发展速度和水平的指标。
第一节语言准备期语言准备期也称前语言期。
一般把儿童出生到能够说出的一个具有真正意义的词之前这一时期划为前语言时期。
具体可分为产生和理解两个方面的准备。
《学前儿童发展心理学》第六章-第三节 思维
用同样的方法帮助认识了“狗”,“猫”。
2、通过语言获得概念(成人讲解、科学概念) (1)什么是小鸟?
身上长着羽毛,在天中飞的动物。
(2)什么是人? 能制造并使用工具进行劳动的高级动物。
三、学前儿童掌握概念的特点
1、以掌握具体实物概念为主,向掌握抽象概 念的发展。
概念的结构
上级概念(内涵):反映事物的本 质特征
如何培养幼儿的数概念?
1、结合日常生活,指导幼儿学习通过对应或 数数的方式来比较物体的多少。
鼓励幼儿通过数数比较两样东西的多少。如数数 有多少个苹果,多少个梨,判断苹果和梨哪个多。
2. 利用游戏中的实际情景,引导幼儿理解数 概念。
结合游戏,为幼儿提供“按数取物”的机会, 如从球框里拿出几个球和小朋友一起玩等。
推理是人在头脑中根据已有的判断推导出新判断 的过程。是判断和判断之间的联系
讲卫生的小朋友不随地吐痰 小华比小贝高,小东比小贝矮
随地吐痰的小朋友不讲卫生 小华最高,小东最矮
2、学前儿童推理的特点
(1)抽象概括性差
年龄小的幼儿看到红积木、黄木球、火柴棍漂浮在 水上,不会概括出木头做的东西会浮的结论,而只会 说:“红的”、“小的”东西浮在水上。
2、幼儿认识数的序列的发展
数序指的是每一个自然数在自然数列中的位置以 及与相邻两数之间的大小关系。
3 ~ 4 岁:幼儿多数能按物点数 5 以内数量的物体, 但问起“ 4 个”和“ 5 个”哪个多时,相当多的幼儿 并不知道。
4 ~ 5 岁:幼儿大约有一半能比较 10 以内数的大小
5 ~ 6 岁:幼儿一般都能顺利地比较 10 以内数的大 小
这个父亲的做法如何?
(二)思维的具体形象性与活动的组织
第六章 儿童语言的发展
52
非语言策略 是儿童理解句子的一种策略,指儿 童在理解句中某些词时,常根据参 照物的特点和自己对事物的预期来 理解词义的策略。
53
四、语用技能的发展
语用技能是指交谈双方根据语言意 图和语言环境有效地使用语言工具 的一系列技能,包括说者和听者两 方面的技能 1.说话的语用技能的发展
2. 听话的语用技能的发展
儿童语言发展又称语言获得,指的是 儿童对母语的产生和理解能力的获得。 语言发展是从儿童在1岁左右说出第 一批真正能被理解的词开始。以词为 界划分为语言准备期和语言发展期。
3
第一节 语言准备期 ——前言语阶段
4
语言准备期也称前语言期,分产 生和理解两方面的准备。
5
一、语言产生的准备 ——语音的发展
二是由一个动宾结构和一个主谓结构套在一起,动宾结构 中的宾语充当主谓结构中主语的递系句。
三是句子中的主语或宾语中又包含主谓结构的句子。
44
(3)复合句(2-3岁)
是指两个或两个以上的意思关联比较密切 的单句合起来构成的句子。中国儿童2岁开 始说出为数极少的简单复句,4到5岁发展 较快。 有联合复句和主从复句。
27
使用范围缩小原因的解释
产生使用范围缩小现象的原因是儿 童对某类事物的基本属性尚未达到 适当的抽象概括水平。
28
2.形容词
儿童使用形容词发展过程的特点:
(1)从物体特征的描述到事件情境的 描述。 儿童最早使用的是描述物体特征的形 容词。其中颜色词出现较早,但各种 颜色词不同时出现,其顺序:红;黑、 白、绿、黄;蓝;紫、灰;棕。
8
出生1个月以后的婴儿,哭声逐渐带 有 条件反射 的性质,出现了 分化 的 哭声。不同刺激引起的哭声也明显 不同。2个月大的婴儿在舒服的时候, 能发出 ai、a、e、ei、ou、nei、ai 、 i等音。
第六章矿井提升系统
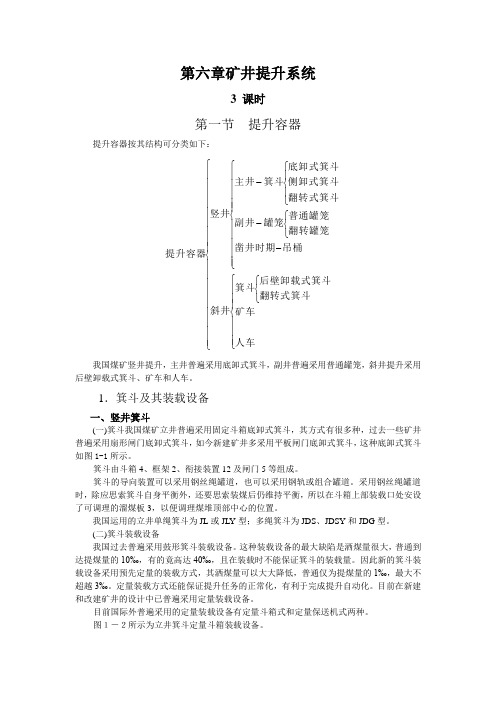
第六章矿井提升系统3 课时第一节 提升容器提升容器按其结构可分类如下:⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎧⎪⎪⎪⎩⎪⎪⎪⎨⎧⎩⎨⎧⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧-⎩⎨⎧-⎪⎩⎪⎨⎧-人车矿车翻转式箕斗后壁卸载式箕斗箕斗斜井吊桶凿井时期翻转罐笼普通罐笼罐笼副井翻转式箕斗侧卸式箕斗底卸式箕斗箕斗主井竖井提升容器 我国煤矿竖井提升,主井普遍采用底卸式箕斗,副井普遍采用普通罐笼,斜井提升采用后壁卸载式箕斗、矿车和人车。
1.箕斗及其装载设备一、竖井箕斗(一)箕斗我国煤矿立井普遍采用固定斗箱底卸式箕斗,其方式有很多种,过去一些矿井普遍采用扇形闸门底卸式箕斗,如今新建矿井多采用平板闸门底卸式箕斗,这种底卸式箕斗如图1-1所示。
箕斗由斗箱4、框架2、衔接装置12及闸门5等组成。
箕斗的导向装置可以采用钢丝绳罐道,也可以采用钢轨或组合罐道。
采用钢丝绳罐道时,除应思索箕斗自身平衡外,还要思索装煤后仍维持平衡,所以在斗箱上部装载口处安设了可调理的溜煤板3,以便调理煤堆顶部中心的位置。
我国运用的立井单绳箕斗为JL 或JL Y 型;多绳箕斗为JDS 、JDSY 和JDG 型。
(二)箕斗装载设备我国过去普遍采用鼓形箕斗装载设备。
这种装载设备的最大缺陷是洒煤量很大,普通到达提煤量的10‰,有的竟高达40‰,且在装载时不能保证箕斗的装载量。
因此新的箕斗装载设备采用预先定量的装载方式,其洒煤量可以大大降低,普通仅为提煤量的1‰,最大不超越3‰。
定量装载方式还能保证提升任务的正常化,有利于完成提升自动化。
目前在新建和改建矿井的设计中已普遍采用定量装载设备。
目前国际外普遍采用的定量装载设备有定量斗箱式和定量保送机式两种。
图1-2所示为立井箕斗定量斗箱装载设备。
图1-3所示为定量保送机装载设备表示图。
图1-l 单绳立井箕斗1—楔形绳环;2 —框架;3 —可调理溜煤板;4—斗箱;5—闸门;6—连杆;7—卸载滚轮;8—套管罐耳(用于绳罐道);9—钢轨罐道罐耳;10—改动弹簧;11—罩子;12—衔接装置图1-2 立井箕斗定量斗箱装载设备1一斗箱;2一控制缸;3一拉杆;4一闸门;5一溜槽;6一压磁测重装置;7一箕斗图1-3定量保送机装载设备表示图1-煤仓;2-保送机;3-活动过度溜槽;4-箕斗;5-中间溜槽;6-负荷传感器;7-煤仓闸门二、斜井箕斗斜井箕斗有后壁卸载式(简称后卸式)及翻转式两种方式。
第六章 市场调查 《市场营销心理学》

控制组 无 无 y
(4)有控制组的事前事后设计
项目
组别
实验组
控制组
事前测量的因变量
x0
y0
实验自变量
有
无
事后测量的因变量
x1
y1
实验自0
y0
6.7 市场营销预测
6.7.1 市场营销预测的产生与发展
6.7.2 定性与定量预测 (1)定性预测,是质的分析 定性预测适用于下列情况: 市场总体形式的演变(又卖方市场演变为买
图6-1 需求 调查 的90 种类
型
2)调查市场的确定
总人数100% 潜在市场100%
现实市场—40%
潜在市场——10% 有效市场—20%
10%
服务市场—
90%
渗透市场—
(a)总市场 (b)潜在市场
图6-2市场定界水平
6.3 市场调查的心理学方法
6.3.1 市场调查的心理学方法概述
心理学的方法主要包括以下几种:
3)封闭式与开放式之比较
封闭问题的优点 (1)回答是标准的,结果有可比性 (2)回答较完整,回收率较高 (3)易于分析与编码,省时省钱 封闭问题的缺点 (1)导致搜集不相干、无价值的信息 (2)搜集的资料不标准,进行统计分析 (3)对回答者要求较高,要有较强的书面表达能力
4)问卷设计中应注意的问题
料
自我报告
(调查法)
问卷 记录表 态度量表
利克特量表
语义差别量 表
等级次序量 表
价值工具
慎独汇报
词语联想
屏蔽问卷
造句测验
讨论指南
画图测验
图片分类
墨迹测验
卡通画(TAT)
其他人格测量
工具
第六章 机械密封
按密封端面接 触状态
按弹簧元件的 运动状态
按密封端面数 目
14
按静环安装位 置
按密封流体在 密封端面引起 的卸载程度
按工作条件
按介质泄漏方 向
按弹性元件的 结构和布置
按用途
1) 按密封端面接触状态分类
密封 端面 接触 状态
接触式 非接触式 半接触式
流体压力与弹性元件压力下机 械密封,端面名义间隙小,多 在混合和边界润滑下运行。
d
2 2
d12
式中 p ——密封流体压力,指机械密封内外侧流体的压差。
(6-4)
p p1 p2 10
(6-5)
6.1.3 力学分析
载荷系数 K 指密封流体压力作用在补偿环上,使之对于非补偿环趋于闭合的有效作
用面积 Ae 与密封环带面积 A 之比。其物理本质是密封流体压力作用比压 pe 与密封流体压力 p 之比。
3
6.1.2机械密封的基本结构、工作原理*
1
2
冲洗液
3
4
5
D
6
B
C A
10 9
87
图6-1 机械密封结构原理
1—弹簧座;2—弹簧;3—旋转环(动环);4—压盖;5—静环密封圈;6—防转 销;7—静止环(静环);8—动环密封圈;9—轴(或轴套);10—紧定螺钉 A,B,C,D—密封部位(通道)
4
机械密封基本元件的作用*
Ae
4
d22 db2
(6-3)
式中,db 为滑移直径,也称为平衡直径,指密封流体压力作用在
补偿环辅助密封圈处的轴(或轴套)的直径。
密封流体压力作用比压 pe 单位密封面上承受的流体压力所施
加的使密封端面闭合的力。
6-5-数据结构——从概念到C++实现(第3版)-王红梅-清华大学出版社
Dijkstra算法——运行实例
v1
10
50
v0
v2
30 10
100
20
v4
v3
60
初始化:S={v0} dist(v, vi):<v0,v1>10 <v0,v2>∞ <v0,v3>30 <v0,v4>100
第一次迭代:S={v0, v1}
数 据 结
构
dist(v, vi):<v0,v1,v2>60 <v0,v3>30 <v0,v4>100
2.1 dist(v, vk) = min{dist(v, vj), (j=1..n)}; 2.2 S = S + {vk}; 2.3 dist(v, vj)=min{dist(v, vj), dist(v, vk) + w<vk, vj>};
V-S vi
数 据 结 构 ( 从 概 念 到 实 现 ) 清 华 大 学 出 版 社
Dijkstra算法——运行实例
v1
10
50
v0
v2
30 10
100
20
v4
v3
60
v1 10
当前的最短路径:
v0
∞
v2
30
<v0,v1>10 <v0,v2>∞
100
<v0,v3>30
数 据 结
构
v4
v3
<v0,v4>100
( 从 概
念
dist[n] 0 10 ∞ 30 100
到 实
现
v1
10
50
第六章 土地质量评价
第六章土地质量评价第一节概述一、土地评价的研究进展土地评价:指当土地用于特定目的时,对土地进行的质量鉴定。
包括土地质量诊断、分类或分等、土地制图、数量统计等。
土地评价分为定性评价和定量评价,前者一般只表示土地的相对适宜性;后者以数值指标来规定土地间的质量差别。
案例:国内外土地持续利用评价研究进展二、土地评价的原则1、综合性原则2、差异性原则3、多学科活动协同研究4、要针对特定的土地利用方式5、评价要切合当地的自然、经济和社会条件6、土地利用的持续性是评价的基础7、评价要在几种用途之间进行比较三、土地评价类型第二节土地自然适宜性评价一、土地适宜性评价的概念及分类土地特性或土地质量与作物或土地利用方式的生理、生态要求匹配过程,称为土地适宜性评价。
土地适宜性评价按评价的方法可以分为定性的、定量的,以及定性和定量相结合的土地适宜性评价;按评价的目的可以分为当前的、潜在的土地适宜性评价;按评价的对象可以分为单宜性(如橡胶)、双宜性(如苹果、板栗)、多宜性(如农林牧多种用途)土地适宜性评价。
二、土地适宜性评价的理论依据土地适宜性评价是以土地质量评价为基础的。
其评价因子用土地特性,但由于土地特性都具有各自的量纲,使得土地特性之间以及与土地质量之间的比较很困难,因此,使用土地特性作评价因子,首先必须进行标准化处理,消除其量纲。
实际上标准化处理的过程是通过土地质量评价将土地特性转化成土地质量,只不过土地质量仍使用土地特性的名称。
三、土地适宜性的分类方法联合国粮农组织(FAO)于1976年推出《土地评价纲要》,其土地适宜性分类系统采用土地适宜性纲、土地适宜性级、土地适宜性亚级、土地适宜性单元四级分类制。
1、土地适宜性纲2、土地适宜性级3、土地适宜性亚级4、土地适宜性单元FAO《土地评价纲要》土地适宜性评价系统中国土地适宜性评价系统中国科学院、国家自然资源综合考察委员会于1983年参照FAO拟定,采用五级分类:⏹第一级,把全国划分为九个土地潜力区;⏹第二级,在土地潜力区范围内给出8个土地适宜类;⏹第三级,在土地适宜类范围内划分出不同的土地质量等级;⏹第四级,在土地质量等范围内划分土地限制类型;⏹第五级,确定土地资源单位,即具体的土地资源类型。
6 第六章 对映异构
1、掌握偏振光、旋光性、比旋光度、摩尔比旋光度的概念。 2、理解对称元素和对称操作,识别指定结构中的对称元素, 掌握手性和手性碳的概念。 3、掌握费歇尔投影规则和使用费歇尔投影式的原则, 以及费歇尔投影式、纽曼投影式与锯架式的转换。 4、掌握含一个手性碳化合物的对映异构现象,对映异构体、 外消旋体。 5、掌握含二个手性碳化合物的立体异构,非对映异构体、 内消旋体,画出上述异构体的纽曼投影式。 6、理解丙二烯型、螺环和有位阻联苯的对映异构的特征。 7、构型标记法,R/S标定法,D/L系。 8、理解对映异构体混合物的化学拆分基本原理。
返回教学内容
第三节
含一个手性碳原子化合物的对映异构
一.对映体(Enantiomers) 乳酸是含一个手性碳原子的典型代表:
COOH COOH
H CH3 OH H3C OH
H
-
构造相同,构型相反,互为物象关系叫对映异构体 (简称对映体) 其中一个是右旋体: []20D = + 3.8º 一对乳酸: 另一个是左旋体: []20D = - 3.8º
H
CH3
HO CH 3
H
投影
使用费歇尔投影式时应注意的操作: 1.不能离开纸面翻转——否则会改变原来的构型。 2.在纸面上转动180º ,不改变原来构型。 3.在纸面上旋转90º 或90º 的奇数倍,则改变原来构型。 4.把其中一个基团固定,其他三个基团按顺时钟方向 或反时 钟方向改变相对位置,则构型不变。 5.任何两个基团互相调换位置,则改变原来构型。
(Enantiotropy or Enantiomorphism) (旋光异构)
(Conformers or rotational isomers)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所以,超前校正的传递函数为: αT1s +1 2s +1 Gc1(s) = = T1s +1 0.2s +1
(5)校核 串联滞后—超前校正元件的传递函数为:
Gc (s) = Gc1 (s)Gc2 (s) =
βT2s +1 αT1s +1 10s +1 2s +1
=
T2s +1 T1s +1 100s +1 0.2s +1 得出校正后系统的开环传递函数为:
R(s)
_
k s (Ts + 1)
C(ห้องสมุดไป่ตู้)
系统的闭环传递函数
k k k /T GB (s) = = 2 = 2 1 s(Ts +1) + k Ts + s + k s + T s + k / T
ω = 2 2 s + 2ζωn s + ωn
2 n
由此得到: 由此得到:ωn = k / T , ζ = 1/ 2 kT 或 k = ωn / 2ζ , T = 1/ 2ζωn
所谓“希望特性”是指满足给定性能指标的系统 开环渐进幅频特性L(w),由于这种特性只通过幅频特 性来表示,而不考虑相频特性,故“希望特性”只适 用于最小相位系统。 下面我们典型1型二阶系统为例,看看期望串联校 正如何实现。
一、期望对数频率特性
1、二阶期望特性(1型二阶系统的参考模型) 1型二阶系统的开环揣函数 k G (s) = s (Ts + 1) 从系统的开环传递函数可见,它相当于有一个 放大环节、一个积分环节以及一个惯性环节组成。 它对应的闭环系统为:
可见PID是一滞后—超前元件。
在控制系统中,当采用具有相位滞后—超 前特性的控制器作为系统的校正装置时,这 种校正形式便称为滞后—超前校正。 在实际应用中,一般采用近似PID的形 式,它的传递函数为:
Gc (s) =
αT1s +1 βT2s +1
T1s +1 T2s +1
(α >1,β <1,αT1 < βT2 )
二、滞后—超前校正举例:
滞后—超前校正的步骤见P230 例6-5 某控制 系统的不可变的部分的开 环传递函数为:
k Go ( s) = s( s + 1)(0.5s + 1)
要求系统具有如下性能指标: ①开环增益K=10s-1 ②相位裕度r>500 ③幅值裕度kg(dB)>10(dB) 试确定串联滞后—超前校正装置的参数
滞后- §6-4 滞后-超前校正参数的确定
滞后- 一、滞后-超前校正及元件的特性
从前面的学习的PID控制器中我们看到: 从前面的学习的PID控制器中我们看到: PID控制器中我们看到 • 第一项是比例环节,主要为了保证系统的稳态精度; 第一项是比例环节,主要为了保证系统的稳态精度; • 第二项积分环节,主要是为系统增加一个无差度,提 第二项积分环节,主要是为系统增加一个无差度, 高系统的稳态性能;但积分环节的加入使相位滞后90 高系统的稳态性能;但积分环节的加入使相位滞后900, 可见PID控制器由滞后特性; PID控制器由滞后特性 可见PID控制器由滞后特性; • 第三项是微分环节,主要为了增加系统的阻尼比,提 第三项是微分环节,主要为了增加系统的阻尼比, 高系统的稳定性,又由于微分环节使相位超前的作用, 高系统的稳定性,又由于微分环节使相位超前的作用, 提高了系统的相对稳定性和响应速度。可见PID PID控制器 提高了系统的相对稳定性和响应速度。可见PID控制器 又具有超前特性。 又具有超前特性。
[-20]
2ω n
γ = 65 .5 0
ω1 = 2ωn
ωc = k =
ωn 2ζ
[-40]
ω
可见,此时的系统的性能是 比较好的,因此将 ζ = 0.707 时的1邢二阶系统称为“二阶 最佳模型”
由于1型二阶系统,可以保证阶跃输入时,系统 没有误差 (ess = 0) ,并且保证一定精度的条件下,能 跟踪斜坡信号,加上典型1型二阶系统参考模型的性 能指标和结构参数间的关系比较简单,因此在系统的 设计中广泛使用,另外,虽然一般系统均为高阶系统, 但在分析中我们往往抓住对系统动态特性影响较大的 主导极点,也就是说通常可以将高阶系统简化为一个 二阶系统来研究。 例:某单位反馈系统的开环传递函数为
× 100% 4
调整时间: 调整时间: ts =
3
ζω n
或
ζω n
(0 < ζ < 0.8)
ζ 闭环频域指标与参数 ωn , 间的关系
谐振峰值: 谐振峰值: Mr =
ζ = 0.1
1 2ζ 1− ζ
2 2
(0 < ζ ≤ 0.707) (0 < ζ ≤ 0.707)
谐振频率: 谐振频率: ωr = ωn 1− 2ζ
可见,1型二阶系统是一个典型的二阶系统,于 二阶系统的标准传递函数形式比较可得到1型二 阶系统的k,T与二阶系统的 ωn ,ζ 之间的关 系。 0 在前面的学习中我们知道, < ζ < 1时,系 统的单位阶跃响应具有衰减振荡特性,其时域 指标与参数间的关系为
超调量 σ % = e
−πζ / 1−ζ 2
从图中得到:
ω co = 2 .43 rad / s ω go = 1 .4 rad / s γ o = − 28 o < 50 o
kg 0 = − 10 .5 dB
可见,系统指标不满足要求,且系统时不稳 定的。所以需校正。 确定Wc (2)确定Wc 若wc取得过大,则要补偿的超前角过大,实 现困难;若wc取得过小,则对系统的快速性不利, 对完全复现输入信号也可能不利。一般当系统对 wc无特殊要求时,可选wc等于wgo,
所以,滞后校正装置的传递函数为:
Gc1(s) =
βT2s +1 10s +1
T2s +1 = 100s +1
(4)确定超前校正参数 因为在wc处有 w
20 lg Go ( jωc )Gc ( jωc ) = 0 则 20lg G c ( jωc ) = −20 lg Go ( jωc ) = −11 dB
③上述各校正部分能发挥各自长处的关键是 参数的选取,若参数选择适当,那么,滞 后—超前校正即可提高系统的动态性能又 可提高系统的稳态性能。
§6-5 用希望对数频率特性确定校正参数
在受控对象、控制元件和控制方案均确定的情况 下,理论设计工作实际就是计算和选择校正装置,使 系统的性能符合性能指标的要求。 对于一个控制系统,如果根据对系统提出的性能 指标按“三频段”的概念,先建立一个期望的、符合 性能指标的开环频率特性,然后把它与未校正系统的 开环频率特性进行比较,最后得出应在未校正系统中 加入的串联校正装置的特性和参数,这种方法称为期 望串联校正法。
可见校正后,系统的各项指标都满足了性能 指标的要求
通过Matlab观察校正前后的阶跃响应图
num=[10]; % 未校正前的传递函数分子 den=conv([1 1 0],[0.5 1]); %未校正前传递函数分母 num1=conv([10 1],[2 1]); %校正装置传递函数的分子 den1=conv([100 1],[0.2 1]); %校正装置传递函数的分母 num2=conv(num,num1); %校正后系统传递函数分子 den2=conv(den,den1); %校正后系统传递函数分母 [numb,denb]=cloop(num,den); [num2b,den2b]=cloop(num2,den2); subplot(2,1,1) step(numb,denb) subplot(2,1,2) step(num2b,den2b)
又因为滞后—超前校正的最大幅值为:
Lm = 20lg β = 20lg 0.1 = −20 (dB)
过横坐标为Wc,纵坐标为-11dB的点,作 +20dB/dec直线与0dB线以及与Lm线分别相交于
1 α T = 0 . 5 ⇒ α T1 = 2 1 1 = 5 ⇒ T1 = 0 . 2 T1
γ = tg
−1
2ζ 1+ 4ζ 2 − 2ζ 2
曲线为: 当 ζ = 0.707 时,开环对数频率特性 曲线为:
L(ω)
此时: σ % = 4 .3 %, t s = 4 .2 / ω n 此时: M r = 1, ω r = 0 , ω b = ω n
ω c = 0 .707 ω n , ω1 =
(6- 32)
近似PID控制器的有源网络可采用教材中图 6-22所示的电路来实现。
滞后—超前校正环节的频率特性为: jαT1ω +1 jβT2ω +1 Gc ( jω) = (α >1,β <1,αT1 < βT2 ) jTω +1 jT2ω +1 1 滞后—超前环节的Bode图 滞后 超前环节的Bode图 超前环节的Bode
G(s) = Go (s)Gc (s) 10 (10s +1) (2s +1) = s(s +1)(0.5s +1) (100s +1) (0.2s +1)
num=[10]; % 未校正前的传递函数分子 den=conv([1 1 0],[0.5 1]); %未校正前传递函数分母 bode(num,den); %未校正前系统的Bode图 num1=conv([10 1],[2 1]); %校正装置传递函数的分子 den1=conv([100 1],[0.2 1]); %校正装置传递函数的分母 num2=conv(num,num1); %校正后系统传递函数分子 den2=conv(den,den1); %校正后系统传递函数分母 hold on bode(num1,den1); bode(num2,den2)