基于多旋翼无人机飞行器平台的创新应用
系留多旋翼无人机及其应用
系留多旋翼无人机及其应用系留多旋翼无人机是一种能够在空中悬停并保持稳定的飞行器,通常由多个旋翼和一段绳索组成。
绳索一端连接着无人机,另一端则固定在地面或其他结构物上,使得无人机能够在特定区域内自由飞行,并可以长时间停留在空中。
这种设计可以大大延长无人机的飞行时间,提高其在特定任务中的作业效率。
系留多旋翼无人机的应用领域非常广泛,比如在军事方面,它可以用于侦察、监视和情报搜集等任务。
它可以携带各种传感器和摄像设备,对敌方阵地或设施进行监视,并及时传回情报,为作战指挥和决策提供有力支持。
它还可以用于搜救行动,通过携带红外线和热成像设备,可以在复杂地形中快速搜索到被困人员的位置。
在科学研究方面,系留多旋翼无人机也发挥着重要的作用。
例如在地质探测方面,它可以携带地震仪和地质勘探设备,对地下资源进行勘探和开发。
它还可以用于生态环境监测,通过携带各种传感器,对大气、水质、土壤等环境参数进行实时监测,及时了解环境变化,提供数据支持和科学依据。
气象探测是系留多旋翼无人机的又一大应用领域。
它可以携带各种气象探测设备,如风速仪、温湿度计等,对大气环境进行实时监测,为气象预报和灾害预警提供重要数据支持。
在灾害监测方面,系留多旋翼无人机也可以携带传感器,对地震、火灾、洪水等灾害进行监测和评估,为救援和灾害应急处理提供实时数据和信息。
系留多旋翼无人机还可以作为通信中继平台使用。
它可以携带通信设备,提供临时或紧急的通信覆盖,弥补通信基站的盲区,保障通信的连续性和稳定性。
在自然灾害或紧急救援情况下,它可以提供通信支持,与前线指挥中心进行实时沟通,协助救援行动的开展。
系留多旋翼无人机具有广阔的应用前景和市场潜力。
随着无人机技术的不断进步和发展,相信系留多旋翼无人机将会在各个领域发挥更大的作用,为人类的生产、生活和安全带来更多的便利和保障。
基于双STM32多旋翼无人机控制系统设计
基于双STM32多旋翼无人机控制系统设计摘要:随着我国经济建设的飞速发展,科学技术突飞猛进的飞速发展也是有目共睹的,本文分析了基于双STM32芯片控制系统的具体设计方案,主从控制器为两个STM32F107VCT6芯片,数据通信经过高速SPI接口,保证了数据控制的实时性。
同时,本文合并介绍了系统的硬件设计方案,双STM32多旋翼无人机控制系统的设计优良,可以为后续复杂的运算提供更多可行的操作平台,提高了系统的运行功能,以期为此后无人机控制系统的具体设计提供更多的借鉴依据。
关键词:双STM32;多旋翼;无人机;控制系统;设计引言在科学技术不断发达的进程中,多旋翼无人机自身具有的气动结构布局逐渐完善,飞控技术也得到较大进展,在无人机飞行控制的时候,关键是无人机控制的相关设计,也就是控制律。
无人机飞行轨迹控制和姿态控制属于无人机飞控系统的两个方面,只有加强控制系统才可以促使多旋翼无人机飞行轨迹得到有效控制,因此也可以充分说明姿态控制律设计是轨迹规划的主要基础。
飞控系统是多旋翼无人机的核心内容,而姿态控制系统则属于飞控系统的核心,因此多旋翼无人机飞行姿态控制律在设计的情况下,这也就成为关乎其控制结果的重要内容。
在新技术发展的基础上所出现的新控制理论和控制算法,新理论可以比较轻易的解决以往多旋翼无人机设计方面所具有的技术难题,有效解决以往固定翼无人机飞行控制理论问题。
1多旋翼无人机的特点多旋翼无人机主要指的是对称结构的旋翼飞行器,驱动力为无刷电机旋翼产生的升力,主要依靠旋翼不同的升力保持不同的飞行姿态。
四旋翼、六旋翼以及八旋翼均属于多旋翼无人机的样式,虽然旋翼个数各不相同,但其具备相同的飞行原理。
在实际飞行过程中,无人机围绕X、Y、Z三个方向进行转动与移动,分别具备俯仰运动、偏航运动以及滚转运动的方式。
以四旋翼无人机为例,分析其运动原理。
四旋翼无人机相隔旋翼的旋转方向相同,但相邻旋翼的旋转方向相反,可以在飞行时抵消电机的反转力矩,避免出现悬浮自转问题,从而产生偏航运动。
基于现代多旋翼无人机的GPS模块创新设计
1 现代多旋翼无人机概述 1.1 背景与意义 UAV(unmanned aerial vehicle)即无人机,无人机是无
人驾驶飞行器的一种泛称,无人机实现了无人控制,在飞行时 依飞行器的动力装置所获得的升力来抵消飞行器自身的重量, 可通过遥控设备或自主飞行来实现复杂的空中飞行任务。在众 多的无人机类型中,四旋翼飞行器具有出色的性能,相较于固 定翼无人机而言,四旋翼无人机对于起飞条件的要求更低,可 实现垂直起降,其机械架构十分加单,具有负载能力强,可实 现垂直起飞和降落等优点。由于四旋翼飞行器在飞行控制、结 构设计、安装调试等方面的要求较高,因此当前四旋翼飞行器 的研究已成为学术界专家学者研究的热点问题之一。世界上首 架真正意义上的无人机由美国学者所研发并试飞成功。在20世 纪中期,随着自动控制技术和导航技术的逐渐发展,为无人机 的出现和研发奠定了基础,同时,多领域的应用需求使其有着 无与伦比的发展优势[1]。
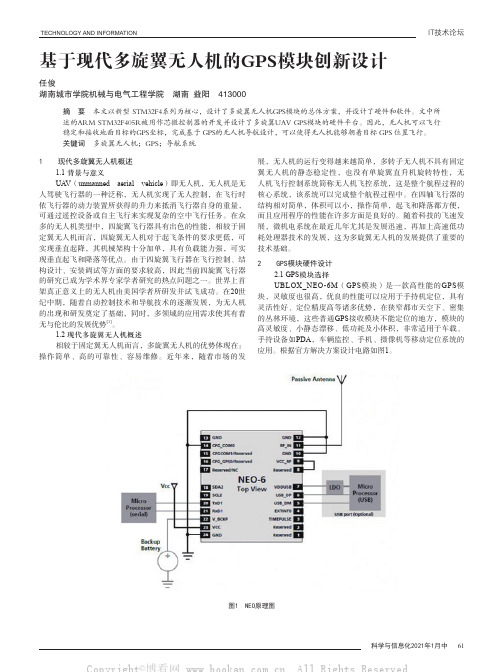
2 GPS模块硬件设计 2.1 GPS模块选择 UBLOX_NEO-6M(GPS模块)是一款高性能的GPS模
块,灵敏度也很高,优良的性能可以应用于手持机定位,具有 灵活性好、定位精度高等诸多优势,在狭窄都市天空下、密集 的丛林环境,这些普通GPS接收模块不能定位的地方,模块的 高灵敏度、小静态漂移、低功耗及小体积,非常适用于车载、 手持设备如PDA,车辆监控、手机、摄像机等移动定位系统的 应用。根据官方解决方案设计电路如图1。
图3 强磁传感器 (4)CAN总线通信硬件 所述TJA1050设计有先进的硅绝缘体上SOI技术和最新的EMC 技术,所以TJA1050具有优异的EMC性能[5]。该TJA1050T具有用 于选择,高速模式和静音模式的两种操作模式。对于CAN收发器 而言,正常模式是用于正常的CAN通讯。从TXD输入的数字位 流,可转换为相应的模拟总线信号,与此同时,监控总线可将模 拟总线信号转换为对应的数字位流,并在RXD引脚完成输出[6]。 TJA1050T正常工作在高速模式,TJA1050 提供一个专用的静音 模式,这个模式中发送器完全禁能。这样就保证了没有信号能够 从TXD引脚发送到CAN总线上,像TJA1040在待机模式一样,这 个静音模式可以建立一个Babbling Idiot保护[7]。如图4所示。
系留多旋翼无人机及其军事应用
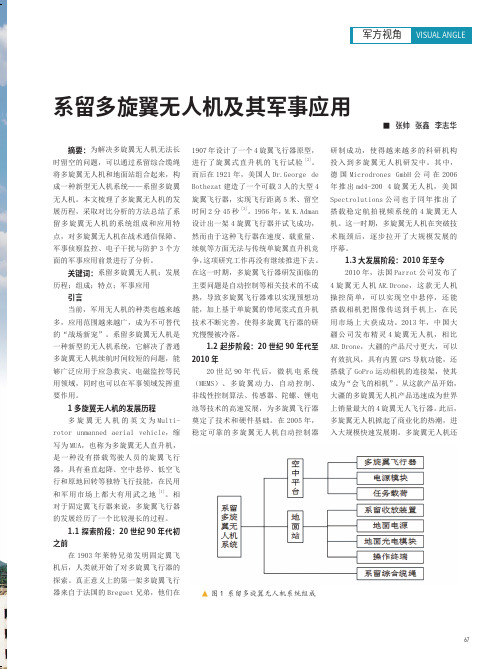
图1 系留多旋翼无人机系统组成开始广泛应用于军事领域,其军事效用也越来越广泛,成为各国军队青睐的无人机选型。
2 系留多旋翼无人机系统组成系留多旋翼无人机是通过系留综合缆绳将多旋翼无人机与地面设备组合起来的一种新型无人机系统,它采用地面电源直接供电,主要解决多旋翼无人机的持续供电问题,以使多旋翼无人机能够不受电能限制而长时间停留在空中。
系统组成主要包括三个部分:2.1空中平台空中平台部分以多旋翼飞行器机体搭载电源模块、任务载荷等组成。
飞行器机体可以根据所搭载负荷重量、体积等不同需求选择不同型号的多旋翼无人人机供电。
在使用过程中,主要由地面电源实现供电,备用电池在系留线缆供电出现故障时自动切换,从而保证无人机安全返航[4]。
任务载荷根据功能需求进行搭载,可搭载如侦察、监控、通信、测绘、环境监测等设备,既可以实现单一功能搭载,也可以多个功能复合搭载。
2.2 地面站地面站由系留收放装置、地面光电模块和操作终端组成。
系留收放装置内设置有自动控制绞盘,对比无人机升空/降落速度实现对综合缆绳的自动收放。
地面电源可以选择发电机、蓄电池组或者市电,向空中平台输送电力。
地面光电模块包括升压模块和光电图2地面固定式系留多旋翼无人机系统图3 车载移动式系留多旋翼无人机系统绍系留多旋翼无人机系统的特点。
3.1 长时留空,定点悬停普通多旋翼无人机发动机常采用电动机或燃油发动机,要依靠机载电池或者是燃油来提供动力,除了要为无人机飞行提供动力外,还需要给云台、相机等机载设备供电,这就会让普通多旋翼无人机出现续航时间短、动力不足等问题。
系留多旋翼无人机采用系留综合缆绳供电方式,不必加装重量较大的电池或者燃油发动机,既减轻了无人机自身重量,还可以利用地面电源实现不间断的持续供电,保证无人机全天24小时长时间留空。
相比固定翼无人机,系留多旋翼无人机还可通过惯性测量元件对三维角速度、三维加速度及三维速度的状态进行测量使多旋翼无人机进行稳定的悬停[5]。
模态解耦控制技术在多旋翼飞行器中的应用研究
模态解耦控制技术在多旋翼飞行器中的应用研究摘要:多旋翼飞行器在无人机领域得到了广泛应用。
然而,由于其非线性动力学和强耦合特性,导致飞行控制系统的设计与性能优化困难重重。
为了解决这一问题,模态解耦控制技术应运而生。
本文通过研究多旋翼飞行器的动力学特性,分析了模态解耦控制技术的原理和特点,并探讨了其在多旋翼飞行器中的应用现状及未来发展。
1. 引言多旋翼飞行器作为一种重要的无人机形式,在农业植保、航拍摄影、物流运输等领域发挥着重要的作用。
然而,多旋翼飞行器的飞行控制系统设计面临着非线性动力学和强耦合特性带来的困难。
传统的PID控制方法已经无法满足多旋翼飞行器高精度、高性能的控制要求,因此需引入更加先进的控制策略。
2. 多旋翼飞行器动力学建模多旋翼飞行器的控制涉及到多个自由度和动力学方程。
为了实现对其飞行姿态和位置的控制,需要对多旋翼飞行器进行准确的动力学建模。
通常,多旋翼飞行器的动力学模型可以分为刚体动力学和变桨动力学两个部分,并通过四元数描述姿态。
3. 模态解耦控制技术原理模态解耦控制技术是一种先进的控制策略,旨在解决多旋翼飞行器动力学方程中的强耦合问题。
它通过将系统的模态分解为不同的模态,并分别控制各个模态的输出,从而实现对系统的解耦和控制。
模态解耦控制技术可以极大地减小系统的复杂性,提高控制性能。
4. 模态解耦控制技术在多旋翼飞行器中的应用近年来,模态解耦控制技术在多旋翼飞行器中得到了广泛的应用。
一方面,模态解耦控制技术可以有效地减小飞行器的动力学耦合,提高飞行性能和稳定性。
另一方面,模态解耦控制技术还可以降低系统的复杂性,简化控制器设计。
在多旋翼飞行器的自动悬停、姿态控制、飞行轨迹规划等方面,模态解耦控制技术都取得了显著的效果。
5. 模态解耦控制技术在多旋翼飞行器中的挑战与展望尽管模态解耦控制技术在多旋翼飞行器中取得了一定的应用效果,但仍面临着一些挑战。
首先,多旋翼飞行器的动力学特性较为复杂,需要进一步优化解耦算法,提高控制精度和鲁棒性。
浅谈多旋翼无人机任务系统的优秀
浅谈多旋翼无人机任务系统的优秀1 多旋翼无人机定义概述我们常称无人飞行载具,为无人飞机系统,主要是利用无线电智能遥控设备,以及自带的掌握程序装置,对于不载人的飞机进行操控。
其中广义的无人机,包括狭义无人机以及航模。
多旋翼飞行器,主要由动力系统、主体、掌握系统组成,动力系统包括电机、动力、电子调速器、桨;主体部分包括机架、脚架、云台;掌握系统包括由遥控接收器、遥控组成的手动掌握;地面站,以及由主控、GPS、IMU、电子陀螺、LED显示屏组成的飞行掌握器。
其中四旋翼,是一种4输入6输出的欠驱动系统;通过PID、,鲁棒、模糊、非线性、自适应神经网络掌握。
近年来,对于系统的掌握功能的讨论趋势,为大荷载、自主飞行、智能传感器技术、自主掌握技术、多机编队协同掌握技术、微小型化等方向。
其中一些关键技术为,数学模型的建立、能源供应系统、飞行掌握算法、自主导航智能飞行。
2 掌握系统改良进展阶段多旋翼无人飞行器的掌握系统,最初是由惯性导航系统,借助了微机电系统技术,形成了EMES惯性导航系统;经过对于EMES去噪声的讨论,有效的降低了其传感器数据噪音的问题,最终经过等速度单片机、非线性系统结构的讨论、应用,最终在2022年,制作出了性能相对稳定的多旋翼无人机自动掌握飞行器。
对其飞行器的评价,可从平安性、负载、敏捷性、维护、扩展性、稳定性几方面要素进行分析。
具有体积小、重量轻、噪音小、隐藏性强、多空间平台使用、垂直起降,以及飞行高度不高、机动强、执行任务力量强的特点;在结构方面,不仅平安性高、易于拆卸维护、螺旋桨小、本钱低、敏捷掌握的特点。
3 技术原理3.1系统组成无人多旋翼任务系统,总体技术方案框图如图1所示;如下图,无人多旋翼任务系统,由无人机、地面工作站构成。
无人机,由多旋翼无人机、任务载荷组成;地面工作站,由数据链通信单元、工业掌握电脑、飞行掌握摇杆等组成。
3.2系统技术原理3.2.1多旋翼无人机,通过对于螺旋桨微调的推力,实现稳定的飞行姿势掌握、维持。
系留多旋翼无人机及其应用
DOI:10.16660/ki.1674-098X.2020.02.057系留多旋翼无人机及其应用龙文彪(航天神舟飞行器有限公司 天津 300301)摘 要:系留多旋翼无人机是将普通多旋翼无人机与地面电源综合起来的一种新型无人机系统,有限解决了航时短的问题,越来越多地应用于通信、侦察及监控领域。
本文总结了系留多旋翼无人机的系统组成、性能优点及在通信和军事侦察方面的应用,系留多旋翼无人机在未来将发挥更大应用价值。
关键词:系留多旋翼 无人机 通信中继 侦查监控中图分类号:E926.3;E96 文献标识码:A 文章编号:1674-098X(2020)01(b)-0057-021 引言多旋翼无人机具有定点悬停、垂直起降、操控简单、成本低等优点,成为一款性能优异的空中平台,同时多旋翼无人机起降不受地形地貌及地面交通的影响,使用范围广,在民用及军用领域展现出巨大的应用潜力。
然而,多旋翼无人机受电池技术水平的限制,续航时间较短,大大限制了其应用范围。
系留多旋翼无人机采用地面供电,实现无人机连续不间断飞行,很好的解决了航时短这一问题。
系留多旋翼无人机是一种新型的无人机系统,将系留综合线缆与多旋翼无人机结合起来,无人机飞行过程中,采用地面电源直接供电,供电设备通过导线为无人机传输电能从而转变了机载锂电池供电模式,使得无人机不受电能限制,可长时间在空中悬停[1]。
根据应用场景和工作环境的不同,地面综合线缆系统可固定在不同的位置,系留无人机分为地面固定式、舰载移动式和车载移动式三种。
系留多旋翼无人机解决了普通多旋翼续航时间短的问题,并且可广泛地应用于应急救灾、无线电监控、军事通信等领域,成为无人机未来发展的一大趋势,现阶段国内外科研机构及无人机厂商纷纷投入到系留多旋翼无人机的研发之中。
2 系留多旋翼无人机系统组成系留无人机系统与普通多旋翼系统的区别在于飞行器平台系统和供电系统,飞行器平台系统作为空中设备的搭载平台,搭载任务载荷到目标区域上空用于通信中继或执行侦察等任务。
基于Pixhawk的多旋翼无人机避障 飞行系统研发
Dynamical Systems and Control 动力系统与控制, 2017, 6(3), 98-108 Published Online July 2017 in Hans. /journal/dsc https:///10.12677/dsc.2017.63013文章引用: 赵航, 王立峰. 基于pixahwk 的多旋翼无人机避障飞行系统研发[J]. 动力系统与控制, 2017, 6(3): 98-108.Study on Obstacle Avoidance Flight System of Multi-Rotor UAV Based on PixhawkHang Zhao, Lifeng WangField Bus Technology & Automation Lab, North China University of Technology, BeijingReceived: May 2nd , 2017; accepted: Jun. 10th , 2017; published: Jun. 13th, 2017AbstractAutonomous obstacle avoidance is an important guarantee for the successful completion of the mission, and it reflects the intelligence and security of the aircraft. This article aims to study the obstacle avoidance technology of multi-rotor UAV based on the cross type quadrotor and Pixhawkwhich is the open source flight control system. A simple and efficient obstacle avoidance system is developed. The flight test shows that the obstacle avoidance system can realize the obstacle avoidance of UAV.KeywordsPixhawk, Quadrotor, Obstacle Avoidance基于Pixhawk 的多旋翼无人机避障 飞行系统研发赵 航,王立峰北方工业大学现场总线技术及自动化实验室,北京收稿日期:2017年5月2日;录用日期:2017年6月10日;发布日期:2017年6月13日摘 要飞行器的自主避障是顺利完成飞行任务的重要保证,同时在很大程度上体现了飞行器的智能性和安全性。
多旋翼无人机的发展及应用免费范文
多旋翼无人机的发展及应用在2010年之前,固定翼模型飞机和模型直升机是航拍和航模运动领域的主力军。
但在近几年,因优良的操控性能,多旋翼飞行器异军突起,迅速成为航拍和航模运动领域的新星,并得到越来越多相关行业的关注。
当前,围绕多旋翼飞行器相关创意、技术、产品、应用和投资的新闻层出不穷,而随着产品的火爆,多旋翼技术的发展更是迅猛,已成为微小型无人机的主流。
多旋翼为何在沉寂数十年之后迅速走红,在未来又有哪些新的发展趋势?本文将针对这些问题进行论述。
早期的多旋翼飞行器人类总是在不断探索中进步。
18世纪后期蒙哥费尔热气球的成功升空,开创了人类飞行的新时代。
1903年世界上第一架重于空气、有动力、可控飞机的诞生,则拉开了人类近代航空发展史的序幕。
1907年,法国Breguet兄弟制造了最早的四旋翼直升机,不过它只飞了几英尺高,且飞行稳定性很差、无法控制。
1922年,美国人Dr.George de Bothezat试验了名叫Flying Octopus的四旋翼飞行器,其最大飞行高度有5米,留空时间2分45秒。
但是该飞行器的稳定性依然不好,未能满足美国军方的要求。
1956年,柯蒂斯-怀特公司为美国陆军设计了VZ-7四旋翼飞行器,并交付给军方两架原型机。
虽然这款飞机的飞行相对稳定,却依然没有达到军方对飞行高度和速度的要求,故该计划没有进一步推进。
此后50年过去了,尽管通过世界各国科学家的不断探索,四旋翼直升机在技术上有了一些进步,但还是不能满足军事方面的要求。
从20世纪初到20世纪中期,直升机的发展进入探索期,包括多旋翼在内的各种试验性机型相继问世。
最终,单旋翼带尾桨式直升机成为至今最流行的形式。
到20世纪后期,传统构型的直升机技术问题基本解决,进入了航空实用期。
其应用领域不断扩展,数量迅速增加。
而多旋翼构型则被慢慢冷落。
此后十几年,有关多旋翼直升机的技术都没有什么进展。
究其原因,主要有3个问题:首先是系统本身不稳定,导致飞行员的负担太重;其次是发动机技术不能满足要求,油门反应速度慢;第三是其运动主要依赖于螺旋桨速度的及时改变,而这种方式不宜推广到大尺寸机型上。
多旋翼无人机测绘技术在矿山测量中的应用
100测绘技术M apping technology多旋翼无人机测绘技术在矿山测量中的应用王驩裕,周孙辉(江西省赣核测绘地理信息有限公司,浙江 宁波 315000)摘 要:UAV技术是以 UAV航控平台为基础、以软件技术为基础的一种新型技术,它打破了常规的遥感技术、大型飞行器航摄技术,并被普遍用于新时代的工程测量。
在矿山的测量中,多旋翼飞行器绘制技术的使用证明,其成图速度快、效率高、精度高、成本低,与全站仪的测定方法比较,两者的测定效果几乎相同,所获得的 X的中偏差为±0.20m,Y的中偏差为±0.16m,高程的中偏差为±0.18m,平面的中偏差为±0.27m,精度可以达到1/2000大比例尺地形图测量的精度,证明多旋翼飞行器绘制技术可达到矿山大比例尺地形图测量的精度。
关键词:多旋翼无人机;矿山测量;精度中图分类号:TD17 文献标识码:A 文章编号:1002-5065(2023)23-0100-3The application of multi rotor unmanned aerial vehicle surveying technology in mining surveyingWANG Huan-yu,ZHOU Sun-hui(Jiangxi Ganhe Surveying and Mapping Geographic Information Co., Ltd,Ningbo 315000,China)Abstract: UAV technology is a new type of technology based on UAV flight control platform and software technology. It breaks the conventional remote sensing technology and large-scale aerial photography technology, and is widely used in engineering surveying in the new era. In the measurement of mines, the use of multi rotor aircraft drawing technology has been proven to have fast mapping speed, high efficiency, high accuracy, and low cost. Compared with the total station measurement method, the measurement results of the two are almost the same. The obtained X has a median deviation of ±0.20m, Y has a median deviation of ±0.16m, the elevation has a median deviation of ±0.18m, and the plane has a median deviation of ±0.27m. The accuracy can reach the accuracy of 1/2000 large-scale topographic map measurement, Prove that the multi rotor aircraft drawing technology can achieve the accuracy of large-scale topographic map measurement in mines.Keywords: multi rotor unmanned aerial vehicle; Mine surveying; accuracy收稿日期:2023-10作者简介:王驩裕,男,生于1996年,浙江宁波人,本科,学士,助理工程师,研究方向:测绘。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多旋翼无人机以其垂直起降无过多起降场地要求的优点,以及留空平稳的特点,在实际应用中已经成为众多特殊场合的无人机应用平台的首选;而基于多旋翼无人机平台的众多创新方案也在不断地从实际需求中得以实现。
以下就针对于现在社会发展的实际需求而提出的创新应用方案:
一、基于多旋翼无人机平台的全自动植保无人机
植保无人机现阶段的发展已经成为仅次于航拍无人机被人们所熟知,而在整个植保无人机的发展局势来看,自动化、智能化已经成为植保无人机的主要方向;现在市场上众多的植保机因为无法满足其基于GPS定位导航精度的要求,而无法依靠飞行器地面站的数字化指令进行航线准确飞行,现在的民用GPS定位精度在0.5~1.2米,这虽然比起单条航线来说并没有什么,但是在整个农作物作业来说将会影响到整个植保作业的药物均匀度;所以大部分都是以人手操控遥控器进行植保作业,这无疑将植保无人机的应用难度和事故率更加扩大。
而且在植保作业的区域内,不同的病虫害类型、不同的损害程度不能及时的掌握,就可能导致因不能及时准确的发现和制定方案,以错过最佳的预防时机。
基于以上的问题现在以往的植保无人机的解决方案是:
以人手持RDK进行地形测量,实时建立地形图作为植保无人机地面站的航迹地图从而进行更精准的航迹飞行,从而将人从飞行过程中解脱出来,更一步提高植保效率和精度;
在病虫害的考察和规划中,还是以专业的农业技术人员亲身进行调查研究。
在天气状况的检测中,以其每个种植基地为基础建立固定的气象台实时测量。
以上解决方案的不足之处现阶段创新应用方案为:
以多旋翼无人机为平台挂载无人机RDK设备,并以4G数学网络进行实时的地形测量数据的传输,在数据处理终端实时化处理,并及时发送到无人机操控平台,形成精准的航迹地形图,解决人为地测量效率和处理工作量;已达到自动化、智能化植保作业。
以多旋翼无人机为平台挂载无人机光谱仪测量设备及气象感应器,及时的通过无人机飞行进行植被光谱数据采集,以第一时间分析植被受害程度和受害种类,和当地气象情况的分析,使其能第一时间制定飞行计划。
总结就是,以无人机来解决无人机的问题,而跟好的为植保作业服务,让植保更智能化。
二、基于多旋翼无人机平台的警用特种排爆装备
现阶段多旋翼无人机在特种装备的发展过程中以其姿态平稳的特性在实时空中监视、空中特殊情况预警起着至关重要的地位,而进一步的发展多旋翼无人机平台在警用特殊装备中可以进行排爆及为现场和的快速应用。
在多旋翼排爆无人机的创新方案中,我们以异型折叠式四旋翼为载体,以便其满足进入不同场合,不同空间限制领域,所能改变其形状特性进入到任务领域;以此为平台我们建立起可视化机械排爆系统,即为实时的应用机械爪进行危险物的危险区域的转移及危险设备的拆除,实现危险最低化,人员财产安全最大化的目标,将成为警用特殊装备领域的一大利器。
固定翼无人机以其特有的长航时,安全性高的特殊性,现阶段在警用特殊场合成为代替人力、节约时间和资源的一大利器,在现阶段高速公路巡查成为很多交通部门的头等难题,而解决这个问题的主要就是可以短时间内实时的传输路况和行车的安全状况。
因此我们提出的固定翼警用路况巡查无人机平台,它是以固定翼无人机为平台。
在此基础上建立起来的可是实时传输图像的高清图传设备,以及实时抓拍功能,其可以满足在巡查路况的同时能够记录拍摄的POS信息,以第一时间记录违规车辆的车牌信息,及所在区域的地理位置和违规时间;让交警部门能第一时间掌握所有路况信息,达到智能信息化。