球坐标距离公式_球心角公式及其应用
笛卡尔坐标转换为球坐标
笛卡尔坐标转换为球坐标在几何学和物理学中,坐标系统是描述空间中的点和物体位置的重要工具。
笛卡尔坐标系和球坐标系是两种常用的坐标系统,它们之间可通过一组转换公式相互转换。
本文将介绍如何将笛卡尔坐标转换为球坐标,并给出详细的转换公式。
笛卡尔坐标系笛卡尔坐标系是平面几何学中最为常见的坐标系统,它使用直角坐标表示点的位置。
笛卡尔坐标系中的点由三个数值组成,分别表示在三个相互垂直的坐标轴上的投影距离。
这三个坐标轴通常被标记为x,y和z。
假设一个点P在笛卡尔坐标系中的坐标为(x, y, z),其中x表示与x轴正方向的距离,y表示与y轴正方向的距离,z表示与z轴正方向的距离。
这样,我们可以使用一组数值来准确地表示点在空间中的位置。
球坐标系球坐标系则是一种描述空间中点位置的极坐标系。
在球坐标系中,点的位置由三个值表示:极径r,极角θ和方位角φ。
极径r表示点到原点(球心)的距离,极角θ表示点在x-y平面上与x轴之间的夹角,方位角φ表示点在z轴上与正半轴之间的夹角。
极径r通常为非负数,极角θ的值范围为[0, π],方位角φ的值范围为[0, 2π)。
球坐标系与笛卡尔坐标系之间的转换关系可以通过一组简单的数学公式来实现。
笛卡尔坐标转换为球坐标将笛卡尔坐标系中的点坐标(x, y, z)转换为球坐标系中的坐标(r, θ, φ)的公式如下:1.计算极径r的值:r = √(x² + y² + z²)2.计算极角θ的值:θ = arccos(z / r)3.计算方位角φ的值:φ = atan2(y, x)这三个公式通过对笛卡尔坐标系中的点坐标进行数学运算,可以有效地将其转换为球坐标系中的坐标。
需要注意的是,在进行转换时要确保原点和待转换点在同一参考系中。
此外,当z轴坐标为0时,极角θ取值为0或π,而当x和y均为0时,方位角φ不唯一。
示例假设有一个点P在笛卡尔坐标系中的坐标为(3, 4, 5),我们可以使用上述公式将其转换为球坐标系中的坐标。
球坐标系_精品文档
球坐标系概述球坐标系是一种三维坐标系,使用球半径、极角和方位角来描述点在球面上的位置。
相比于直角坐标系,球坐标系更适用于描述球体上的位置和方向,尤其在天文学、地理学和航空航天等领域中得到广泛应用。
本文将介绍球坐标系的定义、转换公式和应用。
定义球坐标系由球心、极轴、极面和方位角组成。
球心是球坐标系的原点,极轴是从球心到球面上的点的连线,极面是与极轴垂直的平面。
球坐标系需要两个角度和一个距离来确定点的位置。
极角(θ)是从极轴与参考平面的交点到点的连线与参考平面的夹角,范围为0到π。
方位角(φ)是从参考方向到点的连线与参考平面的交线所成的角度,范围为0到2π。
球半径(r)则是从球心到点的距离。
转换公式将直角坐标系(x,y,z)转换为球坐标系(r,θ,φ)的公式如下:r = √(x^2 + y^2 + z^2)θ = arccos(z / √(x^2 + y^2 + z^2))φ = arctan(y / x)将球坐标系(r,θ,φ)转换为直角坐标系(x,y,z)的公式如下:x = r * sin(θ) * cos(φ)y = r * sin(θ) * sin(φ)z = r * cos(θ)应用球坐标系在许多领域中具有广泛应用。
天文学中,球坐标系用于描述星体的位置和方向。
通过观测星体的极角和方位角,天文学家可以确定恒星的位置和行星的轨道。
地理学中,球坐标系用于描述地球上的位置和方向。
通过使用经度和纬度来确定地理位置,人们可以准确地定位地点并导航。
航空航天领域中,球坐标系用于导航和控制飞行器。
通过使用航向角和仰角,导航员可以确定飞机的朝向和高度,从而精确地控制飞行器。
此外,球坐标系还在计算机图形学和物理学中得到广泛应用。
在计算机图形学中,球坐标系可用于描述三维物体的位置和旋转。
在物理学中,球坐标系可用于描述电场、磁场和其他物理现象的特征。
结论球坐标系是一种三维坐标系,适用于描述球体上的位置和方向。
通过使用球半径、极角和方位角,可以准确地确定点的位置。
解析几何中的球面坐标与球面坐标方程
解析几何中的球面坐标与球面坐标方程球面坐标是解析几何中的一种常见的坐标系,用于描述三维空间中的球面曲线。
球面坐标系由径向距离、两个角度和一个方位角组成,可以通过球面坐标方程来表示。
本文将详细介绍球面坐标的定义、转换公式以及常见的球面坐标方程。
一、球面坐标的定义在球面坐标系中,点的位置由径向距离r、仰角θ和方位角ϕ确定。
其中,径向距离r表示点到球心的距离,仰角θ表示点与正半轴的夹角,方位角ϕ表示点在平面上的方位角度数。
球面坐标可以用三维数学向量来表示,记作(r,θ,ϕ)。
二、球面坐标的转换公式1. 球面坐标与直角坐标的转换公式将球面坐标(r,θ,ϕ)转换为直角坐标(x,y,z)的公式如下:x = r * sinθ * cosϕy = r * sinθ * sinϕz = r * cosθ将直角坐标(x,y,z)转换为球面坐标(r,θ,ϕ)的公式如下:r = √(x² + y² + z²)θ = arccos(z / √(x² + y² + z²))ϕ = arctan(y / x)2. 球面坐标与柱面坐标的转换公式将球面坐标(r,θ,ϕ)转换为柱面坐标(r,ϕ,z)的公式如下:z = r * cosθ将柱面坐标(r,ϕ,z)转换为球面坐标(r,θ,ϕ)的公式如下:r = √(z² + r²)θ = arctan(r / z)ϕ = ϕ三、球面坐标方程的表示球面坐标方程是通过给定的径向距离r、仰角θ和方位角ϕ来描述球面上的点的方程。
球面坐标方程的形式是r=f(θ,ϕ),其中f是一个函数。
常见的球面坐标方程有以下几种:1. 简单球面坐标方程当θ和ϕ的取值范围确定时,球面坐标方程可以简化为一个具体的表达式。
例如,单位球面的球心位于原点,半径为1,其坐标方程为r=1,表示球面上所有点的径向距离均为1.2. 球面方程球面方程是一种常见的球面坐标方程形式,表示为r²=a²+b²+c²,其中a、b、c为常数。
一般方程球心坐标公式
一般方程球心坐标公式球面是三维空间中的一种几何体,它可以由球心和半径两个参数来完整描述。
在球面上的任意一点,都可以由球心和该点到球心的距离(即半径)确定。
在数学上,我们通常使用球心坐标来描述球面上的点,这个坐标系的中心就是球心,而每个点则由两个角度和一个距离来定义。
下面是一般方程球心坐标公式:一般方程球心坐标公式(通常简称为一般方程)是描述球面上的点的坐标系中经常使用的公式。
这个公式在三维空间中可以用来表示任意一点的坐标,因此在数学、物理学、工程学和计算机图形学等领域中都有着广泛的应用。
一般方程球心坐标公式的公式如下:$$(x - x_0)^2 + (y - y_0)^2 + (z - z_0)^2 = R^2$$其中 $x_0,y_0,z_0$ 是球心的三维坐标,$R$ 是球的半径。
这个公式的推导是基于勾股定理的。
如下图所示,我们假设一个球面上的任意一点 $P$,它的坐标是 $(x,y,z)$,球心的坐标是$(x_0,y_0,z_0)$,半径为 $R$。
从球心到点 $P$ 的线段可以表示为向量$\overrightarrow{OP}$,那么根据勾股定理,我们可以得到:$$\begin{aligned} (\overrightarrow{OP})^2 &= (x - x_0)^2 + (y - y_0)^2 +(z - z_0)^2 \\ &= R^2 \end{aligned} $$因此,一般方程就是把勾股定理应用到球面上得到的。
一般方程球心坐标公式的性质:1. 球面上的任意一点 $P$ 都满足一般方程,同时任意满足一般方程的点 $P$ 都在球面上。
2. 如果一个平面和球面都满足一般方程,那么这个平面和球面的交线就是圆。
3. 如果一个直线和球面都满足一般方程,那么这个直线和球面的交点就是一个点。
4. 一般方程球心坐标的坐标系具有球面的对称性。
总结一般方程球心坐标公式是描述三维空间中球面上的任意一点的坐标系,它的公式是基于勾股定理推导而来。
球坐标距离公式、球心角公式及其应用
球坐标系是一种常用的欧几里得坐标系,用来描述球面上点的位置。
在球坐标系中,点的坐标由球心到点的距离r、经度θ和纬度φ三个参数表示。
在球坐标系中,可以使用以下公式来计算两点之间的距离和球心角:
距离公式:d = arccos(sinφ1sinφ2 + cosφ1cosφ2*cos(θ1-θ2))
球心角公式:θ = arctan((sin(θ2-θ1)cosφ2)/(cosφ1sinφ2-sinφ1cosφ2cos(θ2-θ1)))
其中,d为两点之间的距离,θ为球心角。
球坐标距离公式和球心角公式常用来计算地理坐标系中的两点之间的距离和方位角,例如地图上两个城市之间的距离和方位角等。
这些公式也可以用来计算天体物理学中天体间的距离和方位角。
球坐标距离公式和球心角公式的应用不仅局限于地理和天文学,还可以用于其他领域,例如机器人导航、空间探测和卫星定位等。
通过这些公式,我们可以准确计算出两个点之间的距离和方位角,从而实现机器人的自主导航、空间探测器的轨道计算和卫星的定位等功能。
球的方程与性质

球的方程与性质球是一种经典的几何体,具有很多独特的性质和方程。
在本文中,我们将探讨球的方程以及与之相关的性质。
通过理解这些概念,我们可以更好地应用它们解决实际问题。
1. 球的方程球可以用方程表示。
常见的球方程是标准方程和一般方程。
标准方程:如果我们知道球的中心坐标和半径,我们可以使用标准方程来表示球。
对于球心在原点的球来说,其标准方程为:x^2 + y^2 + z^2 = r^2其中 (x, y, z) 是球面上的任意一点,r 是球的半径。
一般方程:如果球心不在原点,我们可以使用一般方程来表示球。
一般方程形式为:(x - a)^2 + (y - b)^2 + (z - c)^2 = r^2其中 (a, b, c) 是球心的坐标,r 是球的半径。
通过了解球的方程,我们可以更准确地描述球面上的各个点。
2. 球的性质球具有许多独特的性质,下面我们来讨论其中的一些。
2.1 球面积和体积球的面积和体积是球的重要特性。
球的表面积可以通过以下公式计算:S = 4πr^2其中 S 是球的表面积,r 是球的半径。
球的体积可以通过以下公式计算:V = (4/3)πr^3其中 V 是球的体积,r 是球的半径。
这些公式是计算球面积和体积的基本工具,对于解决与球有关的问题非常有用。
2.2 球与其他几何体的关系球与其他几何体之间存在一些特殊的关系。
球与平面的交点可以形成三种不同的情况:无交点、一个交点和两个交点。
这些交点的情况取决于球心与平面的位置关系。
球与直线的关系也有几种不同情况。
当直线与球没有交点时,我们称之为相离。
当直线与球相切于球面上一点时,我们称之为相切。
当直线与球相交于两个不同的点时,我们称之为相交。
通过研究球与其他几何体的关系,我们可以更好地理解球的性质及其在空间几何中的应用。
3. 实际应用球体在现实生活中有许多应用,下面我们来看几个例子。
3.1 球体的碰撞在物理学中,球体的碰撞是一个重要的研究领域。
例如,当一个球体在碰撞过程中改变速度和方向时,我们需要使用球体碰撞的物理原理来分析和计算。
高中数学第一章坐标系第4节第2课时球坐标系课件新人教a选修4_4

x=rsin φ cos θ , y=rsin φ sin θ , 求出r、θ、φ z=rcos φ
代入点的球坐标即可;也可以利用r2=x2+y2+z2,
tan
θ
=
y x
,cos
φ
=
z r
.特别注意由直角坐标求球坐标
时,θ 和φ的取值应首先看清点所在的象限,准确取
值,才能无误.
2.设点M的直角坐标为 42, 46,- 22,求它的球坐标. 解:由变换公式得
在△AOB中,AB=OB=OA=R,∴∠AOB=π3 .
π 故飞机经过A、B两地的大圆,航线最短,其路程为 3 R.
我们根据A、B两地的球坐标找到纬度和经度,当飞 机沿着过A、B两地的大圆飞行时,飞机最快,求所飞行 的路程实际上是要求我们求出过A、B两地的球面距离.
3.
用两平行面去截球,如图,在两个截面圆上有两个点,
A、B两个城市,它们的球坐标分别为A(R,
π 4
,
π 6
),
B(R,
π 4
,
2π 3
),飞机沿球的大圆圆弧飞行时,航线最
短,求最短的路程.
[精讲详析] 本题考查球坐标系的应用以及球面上 的最短距离问题.解答本题需要搞清球的大圆的圆心 角及求法.
如图所示,因为A(R,π4 ,π6 ),B(R,π4 ,2π3 ),
π
π
轴,φ0< 2 时它在上半空间,φ0> 2 时它在下半空
间,φ0=π2 时它是xOy平面(如图所示).
已知点M的球坐标为5,5π6 ,43π ,求它的直角坐标.
[精讲详析] 本题考查球坐标与直角坐标的变换关
系,解答本题需要先搞清球坐标(5,
5π 6
球坐标系
球坐标系
球坐标系
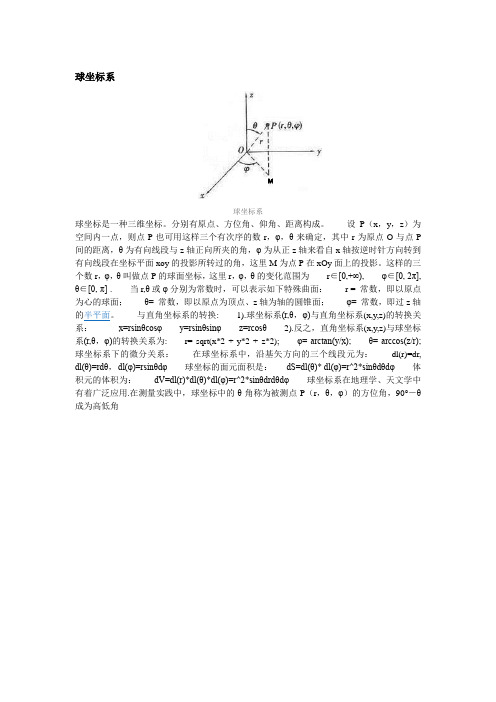
球坐标是一种三维坐标。
分别有原点、方位角、仰角、距离构成。
设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,φ,θ来确定,其中r为原点O与点P 间的距离,θ为有向线段与z轴正向所夹的角,φ为从正z轴来看自x轴按逆时针方向转到有向线段在坐标平面xoy的投影所转过的角,这里M为点P在xOy面上的投影。
这样的三个数r,φ,θ叫做点P的球面坐标,这里r,φ,θ的变化范围为r∈[0,+∞),φ∈[0, 2π],θ∈[0, π] .当r,θ或φ分别为常数时,可以表示如下特殊曲面:r = 常数,即以原点为心的球面;θ= 常数,即以原点为顶点、z轴为轴的圆锥面;φ= 常数,即过z轴的半平面。
与直角坐标系的转换:1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系:x=rsinθcosφy=rsinθsinφz=rcosθ2).反之,直角坐标系(x,y,z)与球坐标系(r,θ,φ)的转换关系为:r= sqrt(x*2 + y*2 + z*2);φ= arctan(y/x);θ= arccos(z/r);球坐标系下的微分关系:在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr, dl(θ)=rdθ,dl(φ)=rsinθdφ球坐标的面元面积是:dS=dl(θ)* dl(φ)=r^2*sinθdθdφ体积元的体积为:dV=dl(r)*dl(θ)*dl(φ)=r^2*sinθdrdθdφ球坐标系在地理学、天文学中有着广泛应用.在测量实践中,球坐标中的θ角称为被测点P(r,θ,φ)的方位角,90°-θ成为高低角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
π 2
≤θ≤ π 2
,- π≤$≤π;(
% 称为经度, θ
称 为 纬 度)
, 因此:
" " x1=r1cosθ1cos&1 x2=r2cosθ2cos(2 y1=r1cosθ1sin’1 , y2=r2cosθ2sin)2 代入( 1) 并化简可得
图1
z1=r1sinθ1
z2=r2sinθ2
( 3)
L= ( x2 - x1) +( y2 - y1) +(z2 - z1 ) ;
点 P 的直角坐标( x,y,z) 与点 P 的球坐标( γ,!,θ) 之间的关系[1]是
( 2)
"x=γcosθcos" y=γcosθsin# ( 显然: x2+y2+z2=r2)( 参照图 1)
z=γsinθ
其中: r≥0,-
( 设地球半径 R=6370 千米)
解: 在用本文所选的球坐标计算地理问题时需注意: 东经和北纬的度数为正, 西经和南纬的度数为负。
本题中, 可取 θ1=39.9°,.1=116.4°; θ2=25.1°,/2=102.4° 代入球心角公式( 8) 得: φ=arccos[cosθ1cosθ2cos(02- 11)+sinθ1sinθ2]≈arccos0.9462=0.3298 弧度, ∴S=Rφ=6370×0.3298≈2101 千米
关键词: 球坐标; 空间直角坐标; 地理坐标( 经度、纬度) ; 球心解公式
中图分类号: O175.1
文献标识码: A
文章编号: 1008- 9020( 2007) 02- 083- 01
众所周知, 空间直角坐标系下两点 M1(x1,y1,z1)与 M2(x2,y2,z2)的距离是:
( 1)
!2
2
2
( 3) 和( 4) 对比, 可得
( 5)
cosφ= x1 x2 +y1 y2 +z1 z2
r1 r2
( 6) cosφ=cosθ1cosθ2cos( !2- !1 )+sinθ1sinθ2 ;
( 7)
φ=arccos x1 x2 +y1 y2 +z1 z2
r1 r2
( 8) φ=arccos[cosθ1cosθ2cos(,2- -1)+sinθ1sinθ2]
图2
(7)是向量分析中常用的两向量夹角公式。( 8) 可看作球坐标“球心角公式”。
例 1 北 京 在 东 经 116.4°, 北 纬 39.9°; 昆 明 在 东 经 102.4°, 北 纬 25.1°; 求 从 北 京 到 昆 明 的 球 面 距 离( 大 圆 劣 弧 弧 长) 。
L= !r12+r22- 2(x1x2+y1y2+z1z2)
( 4)
L= !r12+r22- 2r1r2[cosθ1cosθ2cos(*2- +1)+sinθ1sinθ2]
(4)就是球坐标下的两点距离公式, 简称“球坐标距离公式”。
设#O$M 1 与#O$M 2 所 夹 的 角 为 φ, |O#$M 1|=r1,|O#$M 2|=r2( 参 照 图 2) , 对 ΔOM1M2 使 用 余 弦 定 理 得 : L= !r12+r22- 2r1r2cosφ ; 分 别 与
第 12 卷第 2 期( 2007)
甘肃高师学报
Vol.12 No.2( 2007)
球坐标距离公式、球心角公式及其应用
彭康青
李迎祥
( 陇南师范高等专科学校, 甘肃成县 742500)( 甘肃省文县城关中学, 甘肃文县 746400)
摘 要: 推出球坐标下两点的距离公式和球心角公式并给出它们的几点应用。
答: 北京到昆明的球面距离约为 2101 千米。
参考文献: [1]杨大淳.解析几何.北京师范大学出版社, 1987.
责任编辑: 蒲向明
收稿日期: 2007- 01- 20 作者简介: 彭康青( 1968—) , 女, 甘肃康县人, 陇南师范高等专科学校数学系副教授。
83