ROTORK电动阀总线控制调试详解
ROTORK开关阀的调试和接线

ROTORK调试和接线ROTORK开关阀的所有的设置步骤:第一步:先检查接线是否正确,以及现场阀门情况。
ROTORK开关阀一般情况接线方式:接电源:1,2,3;E:地线。
短接:4,36短接:5,34 (为点动:触点,即按钮按下接通;)短接,长信号(即按钮一直按下,只需将线接到5号端子上,34号端子空着不接线)不短接。
注:点动:如果铭牌是总线控制的当作开关型用就不需要短接。
如果要将总线型改为开关型,则必须将OD(远程控制源)设定成RE。
关阀:5,33开阀:5,355公共端反馈:①关到位:6、7;②开到位:8、9。
42,43(或42、44):接远程或者就地线。
(远程和就地,只需要接一组)可以旋动红设按钮(例如红色按钮打到就地,若再用万用表测量42、43,万用表有蜂鸣声,说明这一组是就地。
)10、11,12、13:接故障报警,这两组可任意接一组线(根据用户要求)。
第二步:先设定开关位置。
(具体如下)若果现场有电源线已接入并且供给电动头,可以在就地上电调试,其调试步骤与手动设定参数一致。
手动调试:先旋转手轮将关位置,设定好(LC=ON);在旋转手轮将开位置,设定好(LO=ON)。
在设定C1(关闭方向)=C(顺时针关闭)、C2(关闭方式)=CL(限位关)、C3(开阀方式)=OL(限位开),TC(关阀力矩值)=85-99%(关阀限位),TO(开阀力矩值)=85-99%(开阀限位)。
把红色的按钮打到就地,旋转黑色开关就可以进行动作了。
STOP为停止,长线条为远程,短线条为就地。
第三步:设定二级参数。
(具体如下)r3、r4根据客户需要设定状态。
用遥控板设定二级参数中的r3、r4这两对触点。
R3=CL,ON;R4=OP,ON。
第四步:检查是否调试正常。
(具体如下)所有参数设定完毕后用万用表指针短接一下34和33号端子,就可实现远程控制。
备注:(当阀门达到开则6、7或8、9这一组触点接通,万用表表笔接触到6、7或8、9有蜂鸣声,说明关或开已经准确。
ROTORK3代调试步骤
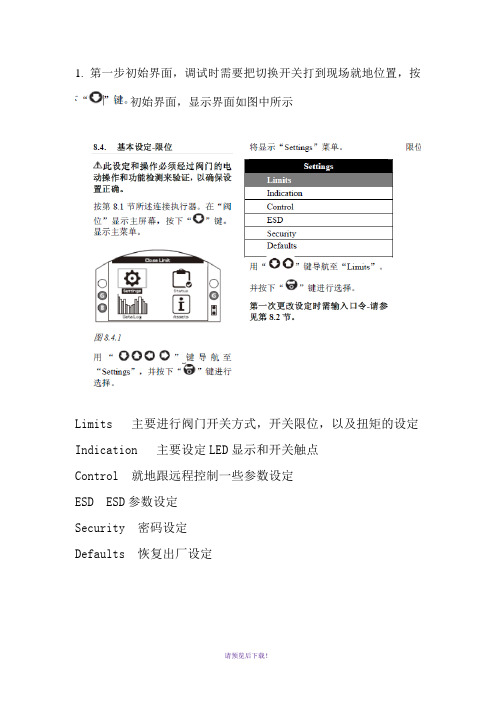
1. 第一步初始界面,调试时需要把切换开关打到现场就地位置,按初始界面,显示界面如图中所示Limits 主要进行阀门开关方式,开关限位,以及扭矩的设定Indication 主要设定LED显示和开关触点Control 就地跟远程控制一些参数设定ESD ESD参数设定Security 密码设定Defaults 恢复出厂设定2.阀位设定,选择图中Limits,按进入关限位调试界面,Direction 开关方向,默认ClockActiom 开关方式 Limit 限位 Torque 力矩Torque 开关阀力矩值的设定Set Limit 设定开关限位进入该界面后,按选择菜单,Direction 默认Clock,按下“”键以选择“ Close Settings”(关设定)中“Direction”方向)功能。
用或进行选择。
按下键进行确认。
Action 选项选择Limit按下“”键以选择界面,用或进行选择,按下键进行确认。
Torque 力矩值选择60%左右,这个跟阀门实际需要的扭矩为准,按下“”键以选择界面,用或进行增减,按下键进行确认。
Set Limit首先将电动头涡轮箱出的2个限位螺栓松出,按下遥控器“”键以选择界面,首先设定阀门关限位将执行器和阀门动作至全关位置后(可以手轮顺时针转动,手轮上有指示),手轮在往开方向回半圈到一圈,然后电动头涡轮箱上面的螺栓(靠近电动头)往里面拧,直到顶住后往外退出1-2圈,锁紧螺母,按下键进行确认关阀限位。
设定阀门开限位:将执行器和阀门动作至全开位置后(可以手轮逆时针转动,手轮上有指示),手轮在往关方向回半圈到一圈,然后电动头涡轮箱下面的螺栓(底部的)往里面拧,直到顶住后往外退出1-2圈,锁紧螺母,按下键进行确认开阀限位。
3.Indication主要设定LED显示和开关触点开关触点按下“”键以选择界面,用或进行增减,按下键进行确认。
LED 显示4.Control 就地跟远程控制一些参数设定就地参数设定 Maintained 保持远程控制参数设定5.Security 密码设定6.Defaults 恢复出厂设定(注:可编辑下载,若有不当之处,请指正,谢谢!)。
ROTORK电动阀设定步骤

ROTORK电动阀设定步骤第一步:了解阀门和执行器的类型和规格在进行设置之前,了解阀门和执行器的类型和规格对于正确设置非常重要。
需要了解阀门的类型(球阀、蝶阀、闸阀等)、阀门的尺寸和材料,以及执行器的类型和能力等。
第二步:安装执行器首先,确保所有的机械连接已正确安装和连接。
根据执行器的型号和规格,使用适当的支撑和固定装置将执行器安装在阀门上。
第三步:电气连接将执行器的电源线连接到适当的电源。
确保所有的电源线都正确连接,并按照电器图纸上的说明进行连接。
第四步:旋转限位开关设置执行器上通常有两个限位开关,分别对应阀门的全关和全开位置。
根据所需的阀门行程和位置,调整这两个限位开关的位置和角度。
第五步:调整初始位置在设置之前,必须将阀门和执行器手动操作至完全关闭的位置。
通过执行器上的手动操作功能,将阀门手动关闭。
第六步:配置执行器控制器根据系统需求和操作方式,设置执行器控制器的参数。
这些参数可能包括执行器的行程时间、阀门行程的反馈信号、启动和停止模式以及其他相关参数。
根据执行器和控制器的型号和规格,按照相关的操作手册进行配置。
第七步:测试和调整完成以上步骤后,进行测试和调整以确保阀门和执行器的正常工作。
执行器通常具有手动操作功能,可以通过手动操作来检查阀门的行程和操作。
在测试时可以进行一些常规动作,如打开、关闭和调节阀门,以确保执行器和阀门的正常运行。
第八步:记录设置参数在设置完毕后,将所有的设置参数记录下来。
这些设置参数将在以后的操作和维护中非常有用。
以上就是ROTORK电动阀设定的主要步骤。
每个具体的设置过程可能会有所不同,但总体来说,理解阀门和执行器的类型和规格,正确安装执行器,进行电气连接,设置旋转限位开关和初始位置,配置执行器控制器,测试和调整,以及记录设置参数是设置ROTORK电动阀的基本步骤。
ROTORK电动阀操作及维护说明

ROTORK电动阀操作及维护说明一. 电器操作就地控制将红色的旋扭打到就地位置,操作黑色旋扭就可开关,当需要停止时,将红色旋扭打到停止位置即可。
远程控制将红色旋扭打到远程位置就可以远程操作,此时就地的停止旋扭仍可以使其停止。
显示-----报警指示IQ的报警显示可以显示控制系统的问题,执行机构的问题,阀的组成问题,和电池报警指示。
分别有一个不同的图标来代表所出现的问题,依据此信息就可解决问题。
当有报警出现时,也可以利用帮助菜单来判断问题。
按遥控器上向下的箭头两次,帮助的屏幕就会出现。
常见的故障有:H1 电气操作系数不正确H2 检查电池电压H3 检查限位开关和执行机构的电源状态是否正确H4 检查输入信号H9 原因不确定主菜单:(按↓键,停留片刻后,按→就可观察如下参数)位置显示扭距和位置显示P PC Ir 密码改变密码通讯Cr 程序支C1 C2 C3 关反向关动作开动作Tc To 扭距关扭距开LC Lo 限位关限位开50 阀位显示说明:C1 关方向手动操作执行机构或阀确定正确的关闭反向。
进入菜单用+或—键显示确认的关闭反向。
显示C是顺时针为关,显示A是逆时针为关。
确定好反向后,按确认键。
C2 关动作进如菜单后,用+或—键来选择希望的选项。
Ct表示关闭是扭距作用,CL表示关的限位开关作用。
此参数是有阀的特点所决定的,我们的阀是蝶阀,参数应设为限位作用。
C3 开动作与关动作的意义是一样的。
Ot表示扭距,OL表示限位。
Tc关扭距值进入菜单后可用+—键输入期望的值,默认值是扭距率的40%。
To 开扭距值与关的意义一样,默认值为40%LC设定关极限手动将阀转到关的位置,后进入菜单,按确认键后,出现两个闪动的棒状光标,并且关闭的知识灯亮,表示此位置已被确认。
Lo 设定开极限与关极限的设定方法一样。
其他功能(一直压住向下的箭头直到Cr出现)位置显示扭距和位置显示P PC Ir 密码改变密码触点功能值形式Cr 触点S1 r1 r1 r1主参数触点S2 r2 r2 r3触点S3 r3 r3触点S4 r4 r4 r4控制模式ESD 过热保护连锁就地停就地维2线外部控制扭距组态动作形式旁路超弛超弛护控制控制连锁条件旁路A3 A4 A5 A可选功能外部指示触点CPT 远程控制远控源总线系统中断时间遥控器就地失电禁止OE OF Od OP OJ Or OS帮助屏H1 H2 H3 H4 H5 H6 H9默认值d1 d2返回到阀位显示说明:㈠指示的触点S1,S2,S3,S4的功能可以随意设定,但默认的功能如下:S1 CL 关的极限位指示常开S2 OP 开的极限位指示常开S3 CL 关的极限位指示常闭S4 OP 开的极限位指示常闭触点的功能设定:进入到此处菜单后,用+或—键找出所期望的功能后按确认后即可。
ROTORKIQ3调试步骤

ROTORKIQ3调试步骤调试ROTORKIQ3执行器可以按照以下步骤进行。
1.确保安全:在开始调试之前,首先确保你自身的安全,例如佩戴个人防护装备(安全鞋、安全帽、手套等)。
确保执行器周围没有危险物品,并将操作区域标记出来。
2.检查供电电源和电缆:确保供电电源的电压和频率与执行器的要求相匹配。
检查电缆连接是否牢固,并在需要时更换损坏的电缆。
3.连接控制信号:将控制器(PLC或远程终端单元)与执行器的控制信号接线端子相连。
确保线路连接正确并紧固。
4. 连接上位机:将工程师电脑或者调试终端连接到执行器的通讯接口(例如Modbus、Profibus、HART等)。
确认连接正常,并调整相关通讯参数。
5.参数配置:使用上位机软件或者调试终端软件以及执行器的操作界面,配置执行器的参数,例如控制方式(自动、手动、远程等)、控制信号范围、开度范围等。
6.执行器位置校准:在执行器安装在阀门或其他装置上之前,需要对其位置进行校准。
通过上位机软件或者操作界面选择执行器位置校准功能,并按照提示进行操作。
校准时,执行器会根据设定的开度值或者反馈信号自动调整位置,直至达到准确的位置。
7.设定预设开度:根据实际应用需求,通过上位机软件或者操作界面设定执行器的预设开度。
预设开度是指执行器在工作时所需达到的开度值,通常用于调整控制精度和防止过速或者过冲。
8.动作测试:对执行器进行动作测试,即手动发送控制信号,观察执行器的响应情况。
执行器应该根据控制信号快速、准确地调整到设定的位置。
9.自动控制测试:使用控制器的自动控制功能,通过发送控制信号模拟实际应用场景,观察执行器的响应情况。
确保执行器能够按照设定的开度值进行精确控制,并满足系统的要求。
10.故障诊断:在调试过程中,如果发现执行器无法正常工作或者存在问题,使用故障诊断功能进行故障排查。
根据上位机软件或者操作界面显示的故障信息,进行相应的处理和修复。
11.记录和报告:在执行器调试完成后,将所有的调试参数、测试结果以及故障排查记录保存并制作调试报告。
ROTORK电动执行机构接线与调试
一、接线 二、调试
ROTORK电动执行机构接线与调试
一、接线
以下以模拟量(4~20mA)控制的调节阀,顺时针关阀,开关阀为限位方 式为例,说明接线与调试步骤: 拉电后根据需要接线 确认动力电源已拉电,接线前用万用表确认不带电,进行接线: 必接线: 动力电源:1、2、3 内部 24V (-):4—41短接 内部 24V (+):5-39短接 模拟量指令:26+ 27- 模拟量反馈:22+ 23-
”标记与壳体上的“▲”标记正对。
ROTORK电动执行机构接线与调试
2、进入执行器的设定程序 正常操作:按键 注意:只有当屏幕出现两个“设定条”后,才能进行设置操作,不然只能 进行参数浏览。 详细说明: 进入设置模式--口令
ROTORK电动执行机构接线与调试
3、关阀方向设,
ROTORK电动执行机构接线与调试
9、设定开限位:LO 正常操作:在“LC”菜单下, 按 键,显示“LO”,手动 操作阀门至全开位置,再回打 1/2圈,按 键,开限位闪 烁保存。
ROTORK电动执行机构接线与调试
10、放回阀位显示 正常操作:按 键,直至显示阀位。 以下有四种方式可返回阀位显示状态
ROTORK电动执行机构接线与调试
5、开阀方式:C3 正常操作:在“C2”菜单下,按 键, 显示“C3”,按 或 使“C3”参 数显示为“OL”则为限位开,按 键,开阀方式闪烁保存。 详细说明: 执行器可被设定为力矩开 - 用于回座 阀; 限位开 - 非回座。
ROTORK电动执行机构接线与调试
6、关阀力矩设定:tC 正常操作:在“C3”菜单下,按 键, 显示“tC”,按 或 可修改力矩 值,按 键,关力矩闪烁保存。
ROTORK调试步骤
ROTORK执行器-AWT型设备简述ROTORK 执行器的马达具有较大的启动力矩,确保阀门在全关时能够及时打开,除非力矩超出范围或电压太低。
三相交流马达的参数等级为;380V。
热敏开关:为了保护马达,马达绕组中埋入三个热敏开关,开关接点接入马达控制回路,防止电动机升到很高的温度从而保护电动机。
马达温度高于140℃时,热敏开关动作,开关接点断开,电动机跳闸,当温度下降至120℃以后,热敏开关重新闭合,再次启动电动机。
限位开关、力矩开关和可选的位置反馈装置是控制单元的组成部分,阀门的开关位置测量是两个独立的系统,接入控制单元,限位开关:阀门的行程靠电子开关进行控制,两个可调的、往复的机械计数齿轮装置,带动限位开关,当阀门行进到极限位置时,断开电机控制回路。
力矩开关:力矩开关工作在蜗轮部分,力矩开关动作的数值能很容易地在拔盘上设定。
力矩开关作为一个过负荷保护,作用于阀门的整个行程,机械表盘位置指示器:阀门位置指示器是一个可调节的圆盘,带有”OPEN”和”CLOSE”字样,圆盘可以通过一个开关盖上的圆形玻璃观察在手动方式下,限位开关设定和紧急操作是可行的,当执行器在手动方式时,可以进行手动操作,马达驱动被隔离。
当马达启动时,手动操作自动被解除,电动操作期间,手轮是不转动的。
当执行器有特殊的操作要求时,紧急操作是可行的。
调试步骤:1.手动操作阀门至中间位置检查三相电源的转动方向与电动执行器标注的方向是否一致,如果方向是错误的,切断电源,更换U1 和W1 上的两根电源线。
2.手动进行信息传动,分别校对开行程、关行程、开力矩、关力矩,如果与热力配电柜及DCS处显示状态不一至,检查并且改正控制回路3.设定限位开关操作执行器直到阀门到达全关位置,考虑阀门过度转动的可能,关位要留有一定的余度,调节关方向固定螺母,使关限位开关刚好压上即关限位开关动作。
操作执行器直到阀门全开,转回一圈或多于一圈,留有阀门过开的余度,调节开方向固定螺母,使开限位开关刚好压上即开限位开关动作。
RotoRK_型号为IQ或IQM阀门说明书(参考用的阀门调试说明)
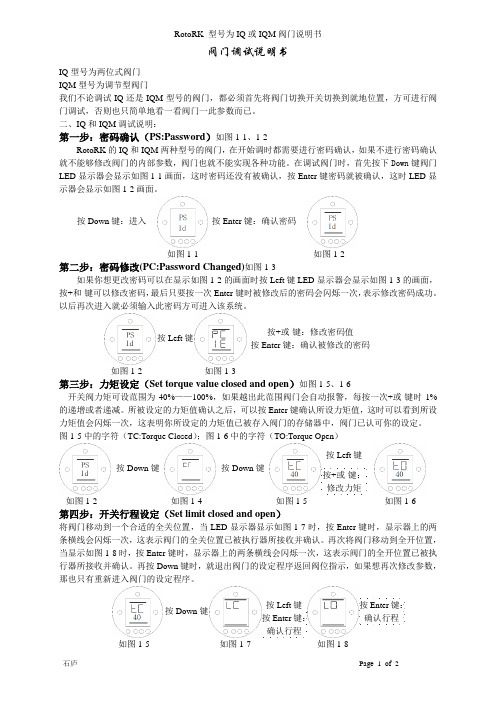
如图1-3按Left 键 按+或-键:修改密码值 按Enter 键:确认被修改的密码按Enter 键:确认密码 按Down 键:进入 按Down 键 按Down 键 按Left 键键: 按阀门调试说明书IQ 型号为两位式阀门IQM 型号为调节型阀门我们不论调试IQ 还是IQM 型号的阀门,都必须首先将阀门切换开关切换到就地位置,方可进行阀门调试,否则也只简单地看一看阀门一此参数而已。
二、IQ 和IQM 调试说明:第一步:密码确认(PS:Password )如图1-1、1-2RotoRK 的IQ 和IQM 两种型号的阀门,在开始调时都需要进行密码确认,如果不进行密码确认就不能够修改阀门的内部参数,阀门也就不能实现各种功能。
在调试阀门时,首先按下Down 键阀门LED 显示器会显示如图1-1画面,这时密码还没有被确认,按Enter 键密码就被确认,这时LED 显示器会显示如图1-2画面。
第二步:密码修改(PC:Password Changed)如图1-3如果你想更改密码可以在显示如图1-2的画面时按Left 键LED 显示器会显示如图1-3的画面,按+和-键可以修改密码,最后只要按一次Enter 键时被修改后的密码会闪烁一次,表示修改密码成功。
以后再次进入就必须输入此密码方可进入该系统。
第三步:力矩设定(Set torque value closed and open )如图1-5、1-6开关阀力矩可设范围为40%——100%,如果越出此范围阀门会自动报警,每按一次+或-键时1%的递增或者递减。
所被设定的力矩值确认之后,可以按Enter 键确认所设力矩值,这时可以看到所设力矩值会闪烁一次,这表明你所设定的力矩值已被存入阀门的存储器中,阀门已认可你的设定。
图1-5中的字符(TC:Torque Closed );图1-6中的字符(TO:Torque Open )第四步:开关行程设定(Set limit closed and open )将阀门移动到一个合适的全关位置,当LED 显示器显示如图1-7时,按Enter 键时,显示器上的两条横线会闪烁一次,这表示阀门的全关位置已被执行器所接收并确认。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ROTORK电动阀总线控制现场调试详细记录2005年8月陕京二线管道工程
中油龙慧:郎志永
Pakscan IIE 总线系统是rotork电动阀专用的通讯系统,他由总线控制器和电动执行机构中的专用通讯卡(FCU)组成。
下图冗余总线控制器
下图普通总线控制器
阀门执行机构通讯卡(FCU)
环形通讯网络,最大通讯速率为2400(默认为1200),最大节点数为240个(默认为60个,如果增加则需要厂家重新下载总线控制器的程序。
)Loop 20mA 15V
网络示意图
详细接线图:A=26(阀头接线端子);B=27;C=28;SCR=29
在控制器中只需要配置环路的波特率和FCU的数量。
(可以给FCU地址一个相应的标签名,即阀号。
)
总线控制器可以自动检测断点位置,回路情况,动作电动阀,每一台FCU 的状态检测等。
现场电动阀如果不用辅助触点则只需要配置波特率和站地址。
(注意,必须在和总线控制器断开连接的情况下才可以配置,可以不拆线给总线控制器断电,否则配置无效)
每一台通讯控制器提供两个modbus RTU半双工端口,1个232端口,1个485端口。
也可以选择modbus tcp端口代替这两个端口。