Yanshee课程2—舵机的回读与连续动作执行

Yanshee课程2—舵机回读与连续动作执行
课程目标:
从向前走路到跟着音乐跳舞,Yanshee机器人可以做出各种各样的动作。机器人是怎样做出这些动作的呢?本节课将从机器人运动的基本元件:舵机的工作原理讲起,向你介绍机器人是如何做出动作的。你将亲手操作Yanshee机器人,录制和编辑一组动作,在机器人上执行。并完成机器人各种动作编排的练习。最后你可以学会如何通过python来调用动作文件完成更加强大的机器人动作编程实践。
课程引入原因:
在前一节课我们学习了机器人的舵机是如何动起来的。对于机器人来说,舵机相当于它的“关节”。仅仅能够转动关节,还不能随心所欲的运动。一个复杂一点的动作,需要多个关节相互协调,共同完成。
人类完成这一切,依靠的是中枢的脑和遍布全身的神经。机器人也有类似的“神经系统”。对于Yanshee来说,它的“神经系统”是单片机、串行总线和数字舵机的处理器。这些系统共同作用,才能让Yanshee作出各种动作。这节课我们将陆续介绍这些重要的概念。
基础概念和术语介绍:
单片机:单片机是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统,在工业控制领域广泛应用。从上世纪80年代,由当时的4位、8位单片机,发展到现在的300M的高速单片机。
PWM信号:PWM是脉冲宽度调制的缩写,指的是一种宽度可变的脉冲波形。通过调整占空比(脉冲宽度占整个周期的比)实现对设备的控制。
占空比:在一个脉冲周期内,通电时间占总时间的比例。(下面是一个占空比示意图)
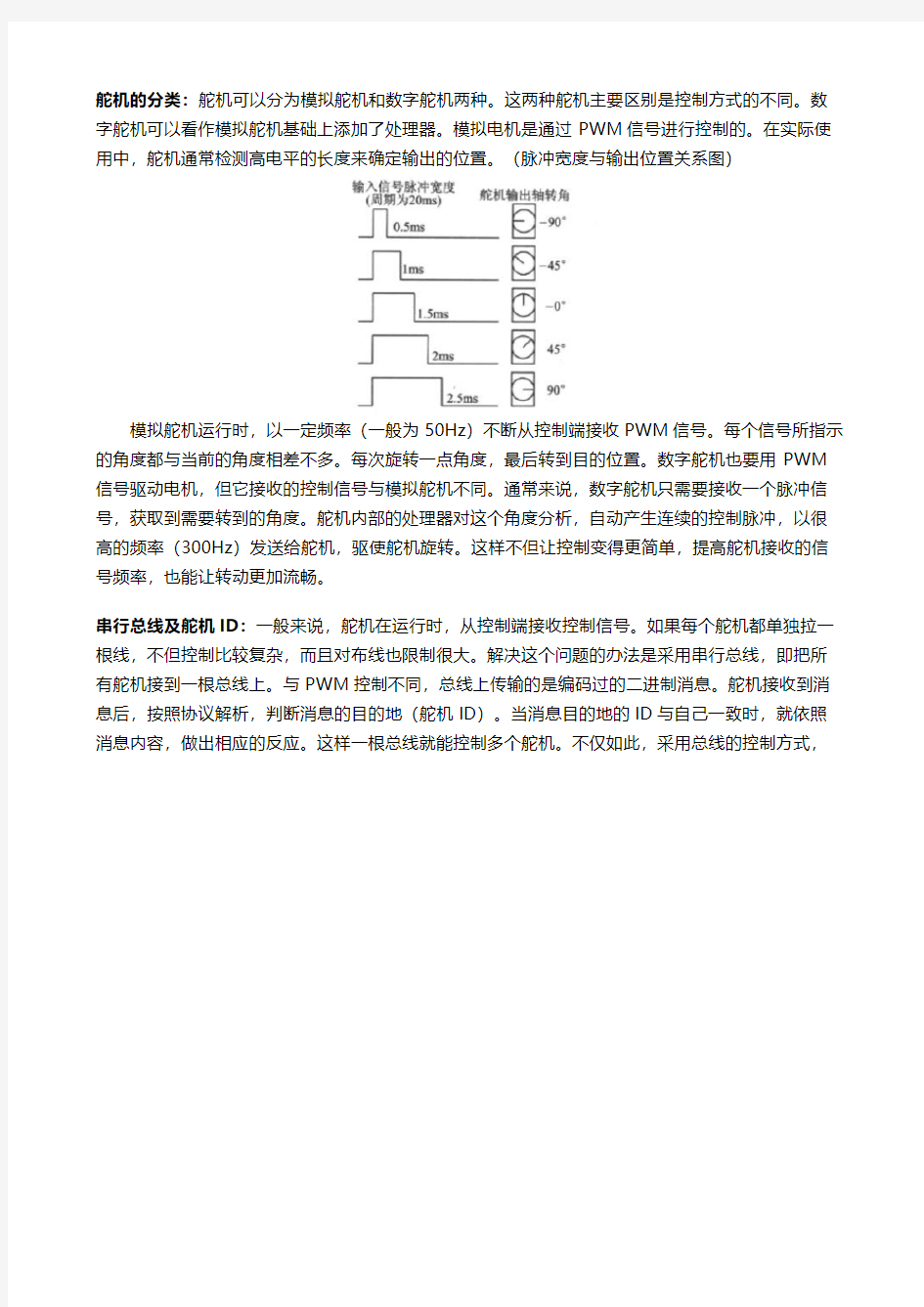
舵机的分类:舵机可以分为模拟舵机和数字舵机两种。这两种舵机主要区别是控制方式的不同。数字舵机可以看作模拟舵机基础上添加了处理器。模拟电机是通过PWM信号进行控制的。在实际使用中,舵机通常检测高电平的长度来确定输出的位置。(脉冲宽度与输出位置关系图)
模拟舵机运行时,以一定频率(一般为50Hz)不断从控制端接收PWM信号。每个信号所指示的角度都与当前的角度相差不多。每次旋转一点角度,最后转到目的位置。数字舵机也要用PWM 信号驱动电机,但它接收的控制信号与模拟舵机不同。通常来说,数字舵机只需要接收一个脉冲信号,获取到需要转到的角度。舵机内部的处理器对这个角度分析,自动产生连续的控制脉冲,以很高的频率(300Hz)发送给舵机,驱使舵机旋转。这样不但让控制变得更简单,提高舵机接收的信号频率,也能让转动更加流畅。
串行总线及舵机ID:一般来说,舵机在运行时,从控制端接收控制信号。如果每个舵机都单独拉一根线,不但控制比较复杂,而且对布线也限制很大。解决这个问题的办法是采用串行总线,即把所有舵机接到一根总线上。与PWM控制不同,总线上传输的是编码过的二进制消息。舵机接收到消息后,按照协议解析,判断消息的目的地(舵机ID)。当消息目的地的ID与自己一致时,就依照消息内容,做出相应的反应。这样一根总线就能控制多个舵机。不仅如此,采用总线的控制方式,
舵机也可以传输信号给控制端,这意味着控制端可以读取舵机的各种信息,舵机出现故障时也能及时上报,进行相应的处理。
舵机回读:总线的结构使舵机向控制端回传数据成为了可能。Yanshee的舵机就有这样的功能。当控制端发送特定指令给舵机时,舵机可以从内部的传感器读取当前的位置,并组装一条包含位置信息的消息传回控制端,控制端可以将这个位置信息记录下来以供以后使用。这个过程我们叫做回读。
舵机掉电:控制输入只需要输入一次指令,数字舵机就能稳定在固定位置。实际上在数字舵机内部,驱动电路会持续发送固定的PWM信号给舵机,将舵机锁在固定位置。如果驱动电路不给舵机发送PWM信号,舵机就会失去动力。表现出来就是舵机“变软”,人可以轻易用手掰动舵机转动。这种状态就是舵机的掉电状态。相对的,舵机“变硬”,难以掰动的状态称作上电状态。
舵机保护:尽管上电状态下,舵机很难掰动,但如果用户非常用力去掰它,或者在舵机上施加一个较大的负载,持续一段时间后,舵机会突然进入一种类似掉电的状态,不再响应各种控制。这实际上是触发了舵机的自我保护功能。电机工作时,会产生一定的热量,如果电流很大,产生热量超过了散热的能力,就会持续升温,烧坏舵机电路或结构。因此,数字舵机有一系列传感器监测舵机的工作状态,一旦发现舵机有过热风险,就会停止工作,防止舵机被损坏。Yanshee的舵机在自我保
护状态下,舵机上的LED会持续闪烁提醒用户,此时用户需要重启机器人,让舵机恢复正常工作状态。
环境准备:
硬件需求:Yanshee机器人一台、装有App的手机一部
软件需求:树莓派Rasbian系统、linux系统、python环境
工作原理:
Yanshee回读编程步骤及原理:像Yanshee这样的人形机器人,它的一个姿态可以由所有舵机的角度共同表示。因此,记录了一组全部舵机的角度,就相当于记录了机器人的姿态。我们可以随时向机器人发送指令,让舵机转到记录的角度,重现这个姿态。如果我们保存多个机器人的姿态,按照一定时间间隔执行起来,这就形成了一个机器人的连续动作。构成这个动作的逐个姿态,就像电影胶片的每一帧一样,因此我们把这些记录了一组舵机角度和执行时间的数据称作动作帧。一系列连续的动作帧,构成一个连贯的机器人的动作。
在Yanshee的App里,我们可以回读机器人的姿态,编辑自己的动作。在Home界面点击「回读
编程」按钮,进入回读编程界面
点击右上角按钮,连接机器人之后。点击左下角手动回读按钮(写有M字母)。会跳出选择肢体界面。
在选择肢体界面,点击机器人的肢体,该部分身体对应的舵机会掉电,方便用户掰动。再次点击已经掉电的肢体,将会使机器人在原来位置上电。当用户将机器人掰到一个合适的位置时,可以点击手动回读按钮,记录这个姿态。通过这种操作,用户可以记录多个。点击预览按钮,机器人将从头开始执行,把这些姿态穿起来,组成一个连贯的动作。
这样编辑出来的动作会有一个问题,就是执行的速度比较缓慢。这时候就需要用到编辑功能。点击
编辑按钮进入编辑模式。点击一个动作帧选中它,屏幕下方工具栏的按钮将会亮起。在工具栏里选择运行时长和间隔时长,可以调整动作帧执行的时间长短。运行时长表示动作开始到结束的时间长短,间隔时长表示运动结束之后,下一帧开始之前等待的时间长短。调整这些数据,可以控制动作
的速度和节奏,配合用户的需求。
用户可以点击保存按钮将动作保存到手机中。动作的每一个动作帧的角度信息和执行时间、间隔时间都会保存在一个文件里。在动作列表中,用户能看到保存的所有动作,打开以前的动作进行编
辑。点击列表中的分享按钮,用户还能将动作文件发送到Yanshee机器人上,用代码执行。
举例:通过python编程来实现相应的机器人动作文件调用。
下面我们仍然使用YansheeSDK编码接口来实现连续动作文件的执行。以下代码我们驱动了名为“Hit left”的动作文件。
代码说明:
我们通过RobotApi.ubtStartRobotAction(actionName,iRepeat)函数命令机器人执行动作文件,actionName为文件的名称,iRepeat为动作重复执行的次数,传0表示一直重复运行下去。可以用RobotApi.ubtStopRobotAction()函数停止正在执行的动作。更多的API使用说明,请参考相关SDK使用手册或者前面章节。
代码执行:保存文件为hitleft.py,在/home/pi下面执行 python hitleft.py 之后观察机器人动作效果。
高级实验:会做俯卧撑的Yanshee
自己通过回读编程编写一套做俯卧撑的动作,命名为push_up.hts. 然后拷贝到相应的机器人目录、mnt/1xrobot/res/hts下完成python代码调用,并执行。
拓展阅读:
通过本节的学习,我们学会了如何通过App来编辑一个合适的动作文件,然后如何通过python接口调用来完成相应的动作,这个过程在实际应用中用处很大。后续章节我们将通过各种输入环节包括:语音输入、视觉输入、传感器输入等等来驱动相应的机器人动作文件完成我们想要的综合应用场景。比如手掌游戏环节,我们会让机器人做蹲下、挥手等动作。摔倒管理环节我们会让机器人做出后撑地站起动作等等,总之,这节课是后续课程的重要基础。连续的机器人动作为人机交互体验起到了支撑性作用。
《太阳升起──动作补间动画》教学设计
《太阳升起──动作补间动画》教学设计【教材分析】 本节课是大连理工大学出版社《初中信息技术》八年级上册第一单元第三课《太阳升起──动作补间动画》,是教材中真正开始“动画”创作第一课,是继学生熟悉了Flash软件的界面组成、工具的简单使用以及元件创建之后的一节新授课,主要任务是讲解动作补间动画的使用方法和技巧。主要目的在于让学生了解Flash动画制作原理以及掌握Flash基本动画类型之一──动作补间动画,并通过作品的创作来培养学生学习兴趣,激发创作灵感,体验成功喜悦,为Flash动画的进一步学习打下良好基础。动作补间动画是Flash动画制作中最基本,也是最常用的动画类型,它是整个Flash程序学习过程中不可或缺的组成部分。因此,本课在教材中占有重要的一席之地。 【教学目标】 一、知识与技能 1.掌握帧、关键帧、帧频率等制作动作补间动画的基础知识; 2.掌握动作补间动画,根据实际需要调整图层之间的顺序。 二、过程与方法 1.通过“太阳升起”讲解如何制作动作补间动画,同时贯穿图层位置关系对动画效果的影响的讲解; 2.通过完善作品,让学生探究自然界中更多的运动,从而达到预期动画效果,以此,使学生对动作补间动画有更为深层次的了解。 三、情感态度价值观 1.通过“太阳升起”来激发学生学习Flash的积极性,并体验动画制作带来的乐趣; 2.在探究阶段,通过研读教材、共同探索,培养学生自主学习和团结协作的能力; 【教学重点、难点】 重点:帧、关键帧的理解、如何确定起始和结束关键帧。 难点:图层在FLASH中的运用及动作补间创建的条件。 【学情分析】
通过上两节课的学习,学生已经对Flash的操作界面有了一定的了解,并能在Flash 中绘制图形、创建图形元件等,但这些知识只是为制作动画做准备,学生还没有接触到真正的动画制作。本课知识学生会首次将静态的画面动起来,因此,教师在讲授新课之初将“太阳升起”最终动画效果展示给学生看就必定会让学生以极高的热情投入到本课的学习中,,针对所教学生基础好,创新能力强这一特点,在上本课前我让学生搭建出有个人特色的“舞台”,时刻准备欢迎新的演员出场。 【教学方法】 教法 任务驱动法:设置多个任务由易到难,深入学习动作补间动画操作方法。 启发教学法:问题的发现与解决都是在教师的启发下完成,突出了以学生为主体,教师是课堂引导者的作用。 学法 探究合作式学习:通过教师的启发,激发学生兴趣,使学生在探究的氛围中学习,从学习中培养探究意识、协作意识和团队精神。 教学资源准备 1.“日出”视频片断。 2.制作好本课的动画实例:“太阳升起、苹果落地、水汽蒸发”。
舵机工作原理
控制思想 该模块的程序框图如图4.5 所示。车模在行驶过程中不断采样赛道信息,并通过分析车模与赛道相对位置判断车模所处赛道路况,是弯道还是直道,弯道时是左转还是右转。直道时小车舵机状态保持不变,弯道时左转或右转,计算转弯半径。我们所用舵机的标准PWM 周期为20ms,转动角度最大为左右90度,PWM调制波如图7.2所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。可以推导出舵机转动角度与脉冲宽度的关系计算公式为: 注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。 当我们根据赛道弯度计算出转动角度以后便可以根据舵机的参数计算出脉冲宽度,控制舵机转动,舵机转角与PWM脉宽关系如表4-1所示。
在具体操作中PWM调制波的周期可以设置在20ms左右一定范围内,比如设置为10ms 或是30ms均可以使舵机正常转动,但是设置周期较长时,系统延迟时间较多,舵机转向会出现滞后,导致赛车冲出跑道;设置周期如果过短,系统输出PWM 调制波不稳定,舵机转动也会受影响,不能实现赛车的精确转向。经过反复测试,最终把输出PWM 调制波周期设定为13ms (用计数器实现)。 运行电机的转速以及舵机的转角,在软件上都是通过对PWM 波占空比进行设置来相应控制的。前面提到,舵机转角控制需要将两个
八位寄存器合成为一个十六位寄存器。程序中的舵机位置信号,当PWM调制波周期设为13ms时,因为总线频率为24MHz,用时钟SB,可计算得到16进制参数为9870H,舵机中间位置时占空比16进制参数为1680H,要分配给PWM6和7,分配时这2个端口的赋值必须是16进制,那么PWM模块初始化赋值为 PWMPER6= 0x98,PWMPER7= 0x70,PWMDTY6= 0x16,PWMDTY7= 0x80,因此这就牵涉到如何将1个十进制数分配为2个十六进制数问题。有2种方案,一种是除法取余,另一种是移位操作,前者编译生成的代码比后者要多,所以采用移位操作来实现,即取高位时与0xFF00先作“&”计算,然后将所得到的数向右移8位(>>8),即可取得高8位;同理,取低8位时只要与0x00FF作“&”计算即可(算法)。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
测量船作业安全操作规程(正式)
编订:__________________ 单位:__________________ 时间:__________________ 测量船作业安全操作规程 (正式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-2622-53 测量船作业安全操作规程(正式) 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 为加强测量船舶驾驶及轮机的安全管理,避免和减少事故的发生,在事故发生后将损失降到最低限度,根据有关规定,制订如下测量船安全操作规程。 一、开船前设备检查 1、开航前检查舵机是否正常。 2、检查航行灯具是否正常发光。 3、检查燃润料是否带足。 4、消防设备是否正常。 5、救生设备是否正常。 6、系泊缆绳是否正常。 7、测量机电设备是否能正常运转。 二、航行途中 1、机驾人员严禁酒后上岗。 2、在船人员必须穿戴好救生衣
3、机驾人员必须持证上岗。 4、航行途中必须加强瞭望。及时掌握航标、航道、航行信号,水文、气象、来往船舶动态和周围环境,结合本船操纵性能采取一切有效措施确保航行安全。 5、正确使用和操纵助航设备,并掌握在使用中发生故障的应急措施。 6、严格按照设备说明书的规定及机电设备的操作规程进行操作管理,确保各项设备技术状况良好,运转情况正常。 7. 严格遵守环境保护法及港章有关规定,认真做好机舱油类和污水处理,防止污染水域。 8、值班机驾员应当坚守岗位,认真操作,严格执行《中华人民共和国内河避碰规则》和其它有关航行规章制度。 9. 船舶驾机人员必须按规定认真填写航行日志及轮机日志,保证记录的真实性完整 10、舶驻港期间认真做好值班工作,做好船舶及仪器清洁,使船舶有良好的船容船貌。
舵机控制程序
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,
获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制信号是PWM信号,利用占
空比的变化改变舵机的位置。一般舵机的控制要求如图1所示。 图1 舵机的控制要求 单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放 器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV 以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波
电路的精度难以达到舵机的控制精度要求。 也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。 具体的设计过程: 例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为 20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在
船上关键性设备操作规程编写须知
船上关键性设备操作规程编写须知 Ship key equipment operation procedures editing instruction 1.目的Objective 本须知旨在规范船舶关键性设备操作规程的编写。 This notice is written for regulate the vessel key equipment operating rules 2.适用范围Applicable scope 本须知适用船上关键性设备操作规程的编制管理。 This notice applies to the editing administration rules of key equipment on board the operational. 3.职责Obligation 船舶各设备主管人员及适任人员负责主管设备操作规程的编写,部门长负责审核,船长批准后交机务部备案。 Each vessel equipment supervisor and eligibility personnel responsible competent for writing equipment operating rules, minister is responsible for auditing, long after the approval by the captain, it should be sent to maintenance department for recording, 4.船舶应编写“操作规程”的设备至少包括如下(如有): The equipments what vessels shall write "operating rules" for are including at least as follows (if any) : 4.1.四机一炉:主机、副机、锚机、舵机包括应急舵、锅炉(废气/燃油/热油炉); Four engines and one boiler: main engine, vice machine, windlass, steering gear includes emergency helm, boiler (gas/fuel/hot oil furnace); 4.2.另有:绞缆机、分油机、空压机、舷梯、救生艇机、救生艇架、本船独特的机械设备 等; In addition: mooring winch, oil purifier, air compressor, the ramp, lifeboat machine, lifeboat frame, this ship unique mechanical equipments, etc 4.3.通导设备、蓄电池充放电; Communication and guide apparatus, storage battery charging and discharging 4.4.应急设备:应急发电机、配电(并车)操作、应急消防泵、大型固定灭火系统等;Emergency equipment: emergency generator, distribution (and engine) operation and emergency fire pump, large fire extinguishing system, etc; 4.5.防污设备:生活污水处理装置、油污水处理装置及焚烧炉等。 Anti-pollution equipment: sewage treatment plant, oil the sewage treatment equipment and incineration installation, etc 5.操作规程编写时的注意事项: The attention notices in operation rules: 5.1.编写前应认真研读设备的说明书,它是编写的依据。 The compiler should studied the specification carefully before compilation as which is the basic of compilation. 5.2.设备说明上有操作规程的,应予以沿用,但须注意安装环境、管系、附件等对设备的影 响。 Equipment illustrate with the operational rules should be used, but must pay attention to influence of the installation environment, tube system, accessories, etc. to the equipment. 5.3.编写时,还应注明:设备的特殊性(如有的话)规定;遥控主副机的机旁操纵试验方 法;控制程序试验及报警的方法。对防污染设备还须规定其具体排放条件和排放标准。When compile, still clearly indicate: equipment particularity (if any) regulation; remote main/vice engine manipulating test method; control program test and alarm method. For pollution prevention equipment also shall be required concrete discharge conditions and emission standard. 6.编写操作规程时,可依照下列次序的内容 When edit operation procedures, who should in accordance with the following sequence: 6.1.使用条件(指外部条件而言):如主机操作,必须接到驾驶台(船长)通知、舷梯收 放应船舶靠妥后进行。 Service conditions(depend on external condition): such as main engine which must receive bridge (captain) notice or the gangway ladder must be settled after vessel berthed.
动作补间动画制作
《补间动画制作》学案 设计教师:陈树君 (二)动作补间动画 说明:前两节课我们已经学习了补间动画的其中一种:形状补间动画,今天我们开始学习补间动画的另外一种:动作补间动画。 一、补间动画的概念 1、补间动画 补间动画只需要确定开始和结束帧的图形,然后由Flash软件自动生成它们之间的画面。也就是说制作补间动画只需要完成第一帧和最后一帧的画面即可。 补间动画分成两种,一种是形状补间动画,一种是动作补间动画。 2、形状补间动画 在Flash软件中,在开始和结束帧中绘制不同形状的图形,然后由Flash软件自动生成它们之间形状变化画面的动画,叫做形状补间动画。 3、动作补间动画 在Flash软件中,先确定开始和结束帧画面中对象的位置、大小,然后由Flash软件自动生成它们之间的画面的动画,叫做动作补间动画。 二、形状补间和动作补间动画的区别 1、形状补间动画时间轴上帧格为浅绿色;动作补间动画时间轴上帧格为浅紫色。 2、制作动作补间动画,画面中的对象必须先转换为元件。 三、动手实践 1、基础练习:制作一个球呈V形移动 第一步:启动Flash,新建一个Flash文档。 第二步:在舞台的左上角绘制一个球的图形。 第三步:选定整个球图形,然后执行修改菜单中的转换为元件命令,把它转为元件。 第四步:右击25帧,插入关键帧,并把图形移到舞台的下部居中。 第五步:右击50帧,插入关键帧,关把图形移到舞台的右上角。 第六步:右击第1帧,单击创建补间动画命令,在第1-25帧之间创建补间动画。 第七步:类似的,右击第25帧,在第25-50帧之间创建补间动画。 第八步:播放动画,看球是否呈V形移动,满意后保存起来。
动作补间动画教案
第三节制作补间动画第一课时动作补间动画 一、教材分析 本课是重庆大学出版社出版的初中信息技术(八年级下册)二单元第三节《动画中的图形与文字》的内容,在前面的课时中,学生已经认识了F l a s h的界面,学会了绘制简单图形及库、元件的使用,但是没有让元件在舞台上真正地动起来。本课教材通过具体的实例让学生学会对图层制作动作补间动画来得到一般性思路及操作步骤,为将来学习形状补间动画及遮罩动画打下知识与方法上的基础。 二、学情分析 从知识上讲,通过前段时间的课堂学习,学生已对动画的原理有了初步的了解,认识了解F l a s h的界面,能够制作逐帧动画,从方法上讲,大多数学生对动画的制作从什么地方入手、有哪些步骤还比较模糊,但是他们都希望让自己的元件在舞台上真正地动起来,体验一下技术带来的动感艺术。 三、教学目标 知识与技能: 1.让学生学会使用工具箱中的选择工具、文本工具、矩形工具制作图形元件; 2.让学生学会制作动作补间动画,学会设置“缩放、旋转、缓动”等选项,做出各种动画效果。过程与方法 通过制作“闪烁的星星”和“贺词”补间动画,让学生学会分析和分解运动过程,理解制作补间动画的一般性思路,掌握动作补间动画的制作方法。 情感态度与价值观 1.让学生通过F l a s h技术手段,做出各种动画效果,从而来正确表达自己的个性化想法,培养学生发现美,创造美的能力。 2.通过教师的引导和小组合作排除学生的畏难情绪,培养学生团队与协作精神 3.通过制作《感恩母亲节贺卡》,让学生进一步体味母爱的无私、伟大,给学生一个表达感恩母亲节的有效途径,激发学生常怀有一颗感恩之心。 四、教学的重点和难点: 重点:如何恰当、合理运用Flash 的补间动画设计简单对象动画过程的制作方法 难点:制作补间动画的一般性思路,如何利用动画设计来开发学生的表达能力,创造力
51控制舵机程序大全
#include
#include
气球飘飘——设置动作补间动画
气球飘飘——设置动作补间动画 一、教学目标 1、知识与技能 (1)、学会制作动作补间动画。 (2)、掌握元件渐隐效果的设置。 (3)、了解形状补间动画与动作补间动画之间的区别。 (4)、巩固元件操作的基本方法。 (1)、通过学习“气球飘飘”的动作补间动画,理解动作补间动画的原理,掌握动作补间动画制作的基本方法。 (2)、通过比较形状补间、动作补间这两种基础动画,初步理解Flash动画制作的原理,能制作一些简单的动画。 (3)、通过学习文字渐隐效果的动画,进一步掌握文字操作的基本方法,加深对动作补间动画制作的了解。 3、情感、态度与价值观 (1)、激发学生学习动画制作的兴趣,培养学生善于分析问题、触类旁通、举一反三的自学能力,培养学生动手操作的实践能力。 (2)、激发学生的想象和创作欲望、培养学生敢于探索新事物、不断进取的精神,促进学生相互学习与合作交流。 (3)、培养学生尊重他人劳动成果、尊重他人知识产权的意识。 二、学情分析 1、教学重点:制作物体的动作补间动画。 2、教学难点:两种基础动画制作方法的异同,触类旁通制作其他动画。 3、教学对象分析:通过前段时间的学习,学生对Flash软件中常用的概念有了进一步的了解,对动画的制作产生了浓厚的兴趣,具备了制作简单动画的能力。 4、教材分析:本课主要的学习内容是制作动作补间动画,在学习过程中使学生理解动作补间动画的原理及与形状补间动画的异同点,在不同的动画设计中灵活选用。本课以“气球飘飘”这一情景引入,在学生在动手操作、实践的探究过程中,掌握Flash软件的另外一种制作动画的基本方法——动作补间。 5、教学资源:多媒体电脑室、课件、素材、评价表 6、教学设计思想及内容结构:
舵机控制C程序
舵机控制C程序 #include
信息技术 冀教版八年级全一册第一单元教案设计:第二课 创建补间动画
第二课创建补间动画 Flash除了可以创建逐帧动画外,还可以创建补间动画。补间动画又包括形状补间动画和动作补间动画。本课安排了制作“魔幻变形”的动画和制作“孩子捕蝴蝶”的动画两个活动,通过这两个活动,使学生掌握形状补间动画和动作补间动画的制作过程和方法。 本课建议课时1课时。 1.了解形状补间动画: “形状补间动画”是补间动画的一种。在改变一个矢量图形的形状、颜色、位置,或一个矢量图变形成为另一个矢量图的过程中,可以使用形状补间动画。在形状补间动画中,只需创建起始和结束两个关键帧,中间帧则由Flash通过计算机自动完成。在创建形状补间动画时,如果需要对组、实例或位图图像应用形状补间,则必须首先将这些元素进行分离,如果对文本应用于形状补间,则必须首先将文本进行两次分离(有的中文版译为“打散”)处理,使其转换成矢量图。 2.绘制图形——混色器面板的使用: 在第一课中,初步训练了图形的绘制,能够给绘制的图形填充纯色,如果想要填充线性或者放射状颜色,必须懂得混色器面板的使用。关于混色器面板的使用在阅读参考资料“使用“混色器”控制面板设置笔触颜色和填充样式”。3.创建形状补间动画: 在时间轴面板上动画开始播放的地方创建一个空白关键帧或选择一个关键帧并绘制图形,一般一帧中以一个对象为好,在动画结束处创建或选择一个关键帧并绘制另外的图形,再单击开始帧,在“属性”面板上单击“补间”旁边的小三角,在弹出的菜单中选择“形状”,此时,可以看到时间轴上发生了变化——淡绿色背景和箭头,一个形状补间动画即创建完成。如果出现虚线,看看前后两个关键帧上是否存在非矢量图或别的元素,将其删除即可。 4.使用“形状提示” 制作形状补间动画时,有时两个图形变化差异比较大,使用“添加形状提示”会改变这一情况。在“起始形状”和“结束形状”中添加相对应的“参考点”,使Flash在计算变形过渡时依一定的规则进行,从而较有效地控制变形过程。
船舶设备操作规程
《船舶设备操作规程》 轮 公司 人员批准。 轮船舶设备操作规程目录
SOM-MILAN-001 主机操作规程 备车程序 一 运行前的检查: 1 检查膨胀水箱水位及水质;检查淡水冷却系统相关阀门(寒冷气温时注意正确转换暖 缸阀);启动淡水循环泵并检查压力和运转情况。 2 检查主机海水冷却系统及中间轴承冷却水相关阀门是否在相应位置,主海水泵预备 妥。 3 检查滑油循环油柜油位。调速器油位,增压器轴承油位,减速齿轮箱油位,中间轴承 油位。检查滑油系统相关阀门的位置,启动滑油泵,检查滑油压力,并作适当调节。 (低温环境,滑油加温维持40°C)。 4 检查主机燃油日用柜油位和油质并放残,确认燃油系统进出口阀门开关正确,检查滤 器通透性(必要时驱气)。 5 检查燃油调节机构连接和灵活性。并确认各缸油门刻度均在“0”位。 6 保持启动空气瓶压力在以上,空气瓶放残。打开进气道放残考克放残并关闭。 7 确认主机齿轮箱离合器处于脱排状态,示功阀全开。主机及飞轮附近无障碍物。 二待机准备: 1 确保滑油泵预润滑5分钟以上。 2 ,把操纵手柄扳至STOP停车位置,合上盘车机,盘车正常后脱开。将盘车杆插在盘车 杆支架里 3 在与驾驶台对时钟,对车钟后,启动空气管阀门打开1/3,控制空气管阀门打开,操 纵手柄在STOP停车位置,按下启动操作阀按扭,执行吹车,检查有无杂物冲出,确认正常后关闭示功考克。 4 接通控制箱的保护和报警电路,确认报警灯闪亮。 5 启动燃油燃油供应单元,正确设定油泵的工作选择开关,粘度计各参数。 6 确认主机各系统温度压力均正常。主机海水泵可在主机进入工作状态后启动。 三启动: 1 全开启动空气阀。 2 机旁启动,把操纵手柄扳至START启动位置,压下启动操作阀按钮启动主机成功后松 开启动操作阀按钮,操纵手柄扳至运转位置,主机在惰速下运转。 集控室启动,把操纵手柄扳至运行位,按下启动按钮,主机启动,在惰速下运转。 检查主机各系统运转工况,确认一切正常后,关闭启动空气阀。 3 在得到驾驶台确认后,进行正倒车合排试验。 4 确认一切正常后,转至驾驶台控制,由驾驶台进行正倒车合排试验。如一切正常,则 主机就处于备车怠速状态。
舵机控制型机器人设计要点
课程设计项目说明书 舵机控制型机器人设计 学院机械工程学院 专业班级2013级机械创新班 姓名吴泽群王志波谢嘉恒袁土良指导教师王苗苗 提交日期 2016年4 月1日
华南理工大学广州学院 任务书 兹发给2013级机械创新班学生吴泽群王志波谢嘉恒袁土良 《产品设计项目》课程任务书,内容如下: 1. 题目:舵机控制型机器人设计 2.应完成的项目: 1.设计舵机机器人并实现运动 2.撰写机器人说明书 3.参考资料以及说明: [1] 孙桓.机械原理[M].北京.第六版;高等教育出版社,2001 [2] 张铁,李琳,李杞仪.创新思维与设计[M].国防工业出版社,2005 [3] 周蔼如.林伟健.C++程序设计基础[M].电子工业出版社.北京.2012.7 [4] 唐增宏.常建娥.机械设计课程设计[M].华中科技大学出版社.武汉.2006.4 [5] 李琳.李杞仪.机械原理[M].中国轻工业出版社.北京.2009.8 [6] 何庭蕙.黄小清.陆丽芳.工程力学[M].华南理工大学.广州.2007.1 4.本任务书于2016 年2 月27 日发出,应于2016 年4月2 日前完 成,然后提交给指导教师进行评定。 指导教师(导师组)签发2016年月日
评语: 总评成绩: 指导教师签字: 年月日
目录 摘要 (1) 第一章绪论 (2) 1.1机器人的定义及应用范围 (2) 1.2舵机对机器人的驱动控制 (2) 第二章舵机模块 (3) 2.1舵机 (3) 2.2舵机组成 (3) 2.3舵机工作原理 (4) 第三章总体方案设计与分析 (6) 3.1 机器人达到的目标动作 (6) 3.2 设计原则 (6) 3.3 智能机器人的体系结构 (6) 3.4 控制系统硬件设计 (6) 3.4.1中央控制模块 (7) 3.4.2舵机驱动模块 (7) 3.5机器人腿部整体结构 (8) 第四章程序设计 (9) 4.1程序流程图 (9) 4.2主要中断程序 (9) 4.3主程序 (11) 参考文献 (13) 附录 (14) 一.程序 (14) 二.硬件图 (17)
电动舵机及电动液压舵机安全操作规程
电动舵机及电动液压舵机安全操作规程 第一条起动前的准备 1、检查舵机机械传动部分有无障碍物,减速装置滑油量 是否充足,各连接、紧固螺栓是否正常。 2、检查各电器设备是否正常,电源是否供电,舵角指示 器与实际角度是否相符。 第二条起动与运行 1、当确认正常后,供电起动运转,检查电机组及变流机的运转是否平稳,有无振动和异响,察看直流电机铜头火花是否在允许的范围内,供电电压是否符合电机要求。 2、工作中,应检查舵机系统有无震动和异响,注意电机组轴承及火花情况,在加减负荷时,注意其工作参数是否正常。 3、检查伞齿轮转动情况,缓冲弹簧及导滑轮使用是否良好,润滑油量是否足够,齿轮箱是否有漏油现象。 第三条停止运转 舵机使用完毕后,应将舵放在中央位置,停止电机供电,保持其系统的清洁,消除运转中出现的缺陷。 第四条试舵 1、停航检修或厂修后,应在舵机间操纵控制手柄做左右30°转舵试验,此时主要注意电机组执行电机、离合器的工作是否正常、可靠。负荷变化时电流、电压指示器是否正常,有无异响。 2、与驾驶台共同进行驾驶台远操机构的转舵试验,核对舵
角、判定远操机构、追随机构的可靠、准确性。检查行程开关是灵敏、可靠(蓄电池供电的备用舵电机,只作上述短时间的试验、校对,并只准在特殊情况下段时间使用)。待一切正常后,方可投入运转。 电动液压舵机安全操作规程 第一条起动前的准备 1、检查舵机机械部分工作表面是否有障碍物,向摩擦件 加注滑油,检查连接件固定螺栓是否牢固。 2、用手转动油泵,查看油泵运动件是否有卡阻现象,各系统阀门是否在正确位置,液压油是否够,检查密封处的密封情况是否良好,工作油是否充分。 3、检查电器设备是否正常,电源是否供电,舵角指示器是否与实际相符。 第二条起动与运行 1、确认上述正常后起动及运行,运行中注意液压油压力 指示是否正常,释放系统中的气体。 2、经常检查舵机工作时有无异响、噪声、机械撞击声、工作油压、滑油压力是否正常,油温应保持在45℃左右,检查电机和油泵的温升情况。 3、注意电机电压是否正常及电器设备动作是否可靠灵敏。 4、做好各摩擦件的润滑,注意油柜滑油的补充,防止油泵吸空。
PWM控制舵机 C程序
#include "reg52.h" sbit control_signal=P0^0; sbit turn_left=P3^0; sbit turn_right=P3^1; unsigned char PWM_ON=15 ;//定义高电平时间 /******************************************************************/ /* 延时函数 */ /******************************************************************/ void delay(unsigned int cnt) { while(--cnt); } void display() { if(PWM_ON>=5&&PWM_ON<=7) P1=0xFD; //1灯亮,舵机接近或到达右转极限位置if(PWM_ON>7&&PWM_ON<=10) P1=0xFB; //2灯亮 if(PWM_ON>10&&PWM_ON<=13) P1=0xF7; //3灯亮 if(PWM_ON>13&&PWM_ON<=16) P1=0xEF; //4灯亮,舵机到达中间位置 if(PWM_ON>16&&PWM_ON<=19) P1=0xDF; //5灯亮 if(PWM_ON>19&&PWM_ON<=22) P1=0xBF; //6灯亮 if(PWM_ON>22&&PWM_ON<=25) P1=0x7F; //7灯亮,舵机接近或到达左转极限位置} /******************************************************************/ /* 主函数 */ /******************************************************************/ void main() { //bit Flag; TMOD |=0x01; //定时器设置 0.1ms in 11.0592M crystal TH0=(65536-78)/256; TL0=(65536-78)%256; //定时0.1mS ET0=1;//定时器中断打开 EA=1;//总中断 //IE= 0x82; //打开中断 TR0=1; // PWM_ON=15 //的取值范围是6-25 while(1) { if(turn_left==0) { delay(1000); if(turn_left==0) { while(!turn_left){}
舵机及转向控制原理
舵机及转向控制原理 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用丁船舶上实现其转向功能,由丁可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1、图2所示。
舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
变速齿轮组 诃调电位器小型宜流电机 fff 图4舵机的组成示意图 图5舵机组成 舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有 两种规格,一是4.8V, 一是6.0V,分别对应不同的转矩标准,即输出力矩不同, 6.0V 对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANW曲某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
输出转轴 电源线知 地线GND 控制线 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号, 控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘 转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进 行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到 目标停止。其工作流程为:控制信号T控制电路板T电机转动T齿轮组减速T舵盘转动T位置反馈电位计T控制电路板反馈。流,才可发挥舵机应有的性能。 舵机的控制信号周期为20MS的脉宽调制(PWM信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0—180度,呈线性变化。也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。舵机内部有一个基准电路,产生周期为20MS宽度1.5MS的基准信号,有一个比出较器,将外加信号与基准信号相比较,判断出方向和大小,从而生产电机的转动信号。由此可见,舵机是一种位置伺服驱动器,转动范围不能超过180度,适用丁那些需要不断变化并可以保持的驱动器中,比如说机器人的关 节、飞机的舵面等。
电动舵机安全操作规程(新编版)
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 电动舵机安全操作规程(新编 版) Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
电动舵机安全操作规程(新编版) 第一条起动前的准备 1、检查舵机机械传动部分有无障碍物,减速装置滑油量是否充足,各连接、紧固螺栓是否正常。 2、检查各电器设备是否正常,电源是否供电,舵角指示器与实际角度是否相符。 第二条起动与运行 1、当确认正常后,供电起动运转,检查电机组及变流机的运转是否平稳,有无振动和异响,察看直流电机铜头火花是否在允许的范围内,供电电压是否符合电机要求。 2、工作中,应检查舵机系统有无震动和异响,注意电机组轴承及火花情况,在加减负荷时,注意其工作参数是否正常。 3、检查伞齿轮转动情况,缓冲弹簧及导滑轮使用是否良好,润
滑油量是否足够,齿轮箱是否有漏油现象。 第三条停止运转 舵机使用完毕后,应将舵放在中央位置,停止电机供电,保持其系统的清洁,消除运转中出现的缺陷。 第四条试舵 1、停航检修或厂修后,应在舵机间操纵控制手柄做左右30°转舵试验,此时主要注意电机组执行电机、离合器的工作是否正常、可靠。负荷变化时电流、电压指示器是否正常,有无异响。 2、与驾驶台共同进行驾驶台远操机构的转舵试验,核对舵角、判定远操机构、追随机构的可靠、准确性。检查行程开关是灵敏、可靠(蓄电池供电的备用舵电机,只作上述短时间的试验、校对,并只准在特殊情况下段时间使用)。待一切正常后,方可投入运转。 云博创意设计 MzYunBo Creative Design Co., Ltd.
舵机控制
利用单片机PWM信号进行舵机控制(图) 基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加以灵 活应用。 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。 图1舵机的控制要求 舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图1所示。 单片机实现舵机转角控制 可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。 也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设