摄影测量学 影像匹配50页PPT
合集下载
摄影测量学 影像匹配
2
vv min
仅仅认为影像灰度只存在偶然误差
n1 g1 ( x, y ) n2 g2 ( x, y )
v g1 ( x, y ) g2 ( x, y )
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
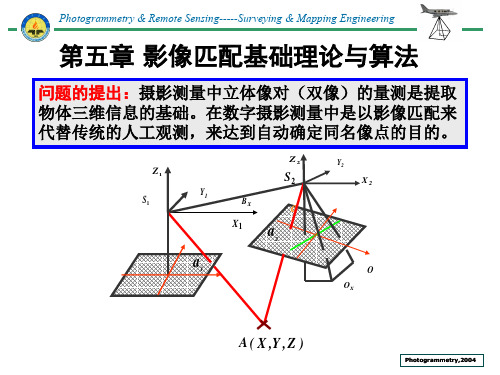
利用影像匹配获得的同名点进行相对定向
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
主要内容:
相关系数匹配的基本原理
核线几何关系解析
最小二乘法影像匹配的原理
单点最小二乘法影像匹配 最小二乘法影像匹配精度
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
最小二乘影像匹配的数学模型
“灰度差的平方和最小”
S 2 X Y ( x1 y1 ) 2 ( x 2 y 2 ) 2 .... ( x N y N ) 2 min
同时解决“多点”影像匹配或“多片”
影像匹配
引入“粗差检测”,从而大大地提
高影像匹配的可靠性
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
1、最小二乘影像匹配原理
影像灰度的系统变形:产生影像灰度分布之间的差异。
vv min
仅仅认为影像灰度只存在偶然误差
n1 g1 ( x, y ) n2 g2 ( x, y )
v g1 ( x, y ) g2 ( x, y )
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
利用影像匹配获得的同名点进行相对定向
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
主要内容:
相关系数匹配的基本原理
核线几何关系解析
最小二乘法影像匹配的原理
单点最小二乘法影像匹配 最小二乘法影像匹配精度
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
最小二乘影像匹配的数学模型
“灰度差的平方和最小”
S 2 X Y ( x1 y1 ) 2 ( x 2 y 2 ) 2 .... ( x N y N ) 2 min
同时解决“多点”影像匹配或“多片”
影像匹配
引入“粗差检测”,从而大大地提
高影像匹配的可靠性
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
1、最小二乘影像匹配原理
影像灰度的系统变形:产生影像灰度分布之间的差异。
摄影测量基础知识PPT课件
摄影测量的主要任务之一:把地面按中心投影规律获取 的摄影比例尺航摄像片转换成以测图比例尺表示的正射 投影地形图
.
28
三、航摄像片上特殊的点、线、面
将空间点、线作中心投影,在投影平 面P上得到一一对应的点、线,这种 经中心投影取得的一一对应的投影关 系称为透视变换
.
29
航摄像片中的重要点、线、面
Es S ho
例 尺
大比例尺 中比例尺
1:4000 ~1:6000 1:8000 ~1:12000 1:15000~1:20000 1:10000~1:35000
1:1000 1:2000, 1:5000 1:5000 1:10000
小比例尺
1:20000~1:30000 1:35000~1:55000
1:25000 1:50000
式中m为像片比例尺分母,f为摄影机主距,H为摄影高度或称航 高。
按照摄影测量要求,像片比例尺分母的相对误差一般不应超过5 %。因此,空中摄影测量飞行航高H的变换量也称航高差应限 制为:
.
15
另外,测量规范还规定同一航带内最大航高与最小航高 之差不得大于30m;摄影区域内实际航高与设计航高 之差不得大于50m。
的像对
p1
p2 p1
P2
S1
S2
S1
S2
理想像对
E 正直像对
.
E
19
7同名光线、同名像点、核线、核面
摄影基线
S1
同名像点
p1 l1
核面
S2
同名核线
p2 l2
A
.
20
核面:摄影基线与同一地面点发出的两条 同名光线组成的面
核线:核面与左右像片面的交线为同名核 线
摄影测量学课件ppt
Z轴位于左主核面内 ( S1 S 2及 o1所在平面)
36
返回目录
单独法相对定向系统
37
第五章 双像解析摄影测量
相对定向元素为: 1 , 1 , 2 , 2 , 2 显然, 在 S1 XYZ 中,
X S1 YS1 Z S1 0
返回目录
§5-4 解析相对定向及模型坐标计算
摄影测量学
1
目
第一章
1-1 1-2 1-3
录
绪论
摄影测量的定义和任务 影像信息科学的形成与内涵 影像信息科学的组成
第二章
2-1 2-2 2-3 2-4 2-5
摄影的基本知识与影像误差处理
摄影原理与摄影机 黑白感光材料 摄影处理与像片晒印 航空摄影及摄影测量对摄影的基本要求 像片影像的误差及其处理
2
目
第三章 单张航摄像片解析
3-1 3-2 3-3 3-4 3-5 3-6 3-7 中心投影的基本知识 摄影测量常用坐标系 像片的内外方位元素 像点在不同坐标系中的变换 中心投影的构像方程(共线方程) 像点位移 单像空间后方交会
录
3
目
第四章 立体观察和立体量测
4-1 4-2 4-3 4-4 人眼的立体视觉 人造立体视觉 像对的立体观察 像对的立体量测
34
第五章 双像解析摄影测量
为什么BX不是相对定向元素?
返回目录
§5-4 解析相对定向及模型坐标计算
B 'Y BX
'
Z
Y
s2
a '2 BX
'
s2
B Z a2
'
s1
BZ X BY
a1
Am
35
A
36
返回目录
单独法相对定向系统
37
第五章 双像解析摄影测量
相对定向元素为: 1 , 1 , 2 , 2 , 2 显然, 在 S1 XYZ 中,
X S1 YS1 Z S1 0
返回目录
§5-4 解析相对定向及模型坐标计算
摄影测量学
1
目
第一章
1-1 1-2 1-3
录
绪论
摄影测量的定义和任务 影像信息科学的形成与内涵 影像信息科学的组成
第二章
2-1 2-2 2-3 2-4 2-5
摄影的基本知识与影像误差处理
摄影原理与摄影机 黑白感光材料 摄影处理与像片晒印 航空摄影及摄影测量对摄影的基本要求 像片影像的误差及其处理
2
目
第三章 单张航摄像片解析
3-1 3-2 3-3 3-4 3-5 3-6 3-7 中心投影的基本知识 摄影测量常用坐标系 像片的内外方位元素 像点在不同坐标系中的变换 中心投影的构像方程(共线方程) 像点位移 单像空间后方交会
录
3
目
第四章 立体观察和立体量测
4-1 4-2 4-3 4-4 人眼的立体视觉 人造立体视觉 像对的立体观察 像对的立体量测
34
第五章 双像解析摄影测量
为什么BX不是相对定向元素?
返回目录
§5-4 解析相对定向及模型坐标计算
B 'Y BX
'
Z
Y
s2
a '2 BX
'
s2
B Z a2
'
s1
BZ X BY
a1
Am
35
A
第3章 摄影测量基础知识ppt课件
表示像点在像平面内位置的 平面直角坐标系。
y y'
a
oy
x
x
o'
x'
?
2D
ppt精选版
S
y
a
o
x
Z G X G
3D O
A
54
Y G
3-4 摄影测量常用的坐标系统
z
y
像
x
空 s
间
直
y
角
ox
坐
标
a
系
a(x,y,-f)
ppt精选版
55
3-4 摄影测量常用的坐标系统
原点、轴向、作用
AE
ppt精选版
作图步骤: 1)找迹点T1 2)找主合点i 3)连T1i与SA,
交点为a
48
§3-3航摄像片上特殊的点、线、面
已知 E 平面上有 AB 直线,在像平面上作对应的像 ab
主合点
P
作图步骤:
中 心 投 影 作 图
S
i
T T1 v
a b
i1 v
1)找迹点T1 2)找合点i1 3)连T1i1与SA,
主灭点(K)
主迹点(V) 主合点(i)
像等角点(c) 地等角点(C) k
R
t
KW
ppt精选版
k
g
G S
i
ho
hc
o
Pg
c
ho
n
hc
VN
tC
O E 43
§3-3航摄像片上特殊的点、线、面
底点特性
S
p
t
V
αn
N
t
a
a0 A
E A0
y y'
a
oy
x
x
o'
x'
?
2D
ppt精选版
S
y
a
o
x
Z G X G
3D O
A
54
Y G
3-4 摄影测量常用的坐标系统
z
y
像
x
空 s
间
直
y
角
ox
坐
标
a
系
a(x,y,-f)
ppt精选版
55
3-4 摄影测量常用的坐标系统
原点、轴向、作用
AE
ppt精选版
作图步骤: 1)找迹点T1 2)找主合点i 3)连T1i与SA,
交点为a
48
§3-3航摄像片上特殊的点、线、面
已知 E 平面上有 AB 直线,在像平面上作对应的像 ab
主合点
P
作图步骤:
中 心 投 影 作 图
S
i
T T1 v
a b
i1 v
1)找迹点T1 2)找合点i1 3)连T1i1与SA,
主灭点(K)
主迹点(V) 主合点(i)
像等角点(c) 地等角点(C) k
R
t
KW
ppt精选版
k
g
G S
i
ho
hc
o
Pg
c
ho
n
hc
VN
tC
O E 43
§3-3航摄像片上特殊的点、线、面
底点特性
S
p
t
V
αn
N
t
a
a0 A
E A0
第五章摄影测量解析基础PPT课件
y f a2 ( X X s ) b2 (Y Ys ) c2 (Z Zs ) a3( X X s ) b3(Y Ys ) c3(Z Zs )
第16页/共106页
第17页/共106页
二、基本关系式 共线条件方程式
x f a1( X X s ) b1(Y Ys ) c1(Z Zs ) a3( X X s ) b3(Y Ys ) c3(Z Zs )
q y1 y2
常用的仪器:steko 1818、HCT-1( 20 m )
PSK2( 1 m )等
第4页/共106页
上下视差(q)读数鼓
左右视差(p)读数鼓
x读数鼓 X手轮
Y手轮
上下视差环
Steko 1818 型立体坐标量测仪
第5页/共106页
左右视差手轮
立体坐标量测步骤
准备工作:标出像片坐标系,标出要量测的 像点位置(定向点、加密点、外业控制点)并 标明点号 像片归心:使像片坐标系的原点位于仪器坐 标系的已知位置(框标连线交点与旋转中心重合) 像片定向:像片平面坐标系与仪器坐标系的 轴系平行,记下仪器的X0、Y0、P0、Q0。
5.1 像点坐标量测 5.2 单像空间后方交会 5.3 立体像对的前方交会 5.4 立体像对的解析法相对定向 5.5 立体模型的解析法绝对定向 5.6 双像解析的光束法严密解
第1页/共106页
• 5.1 像点坐标量测 第2页/共106页
• 用于量测像点坐标的仪器称为立体坐标量测仪。分为普通立体坐标量测仪和 精密立体坐标量测仪。
y f a2 ( X X s ) b2 (Y Ys ) c2 (Z Zs ) a3( X X s ) b3(Y Ys ) c3(Z Zs )
已知值 : x0 , y0 , f , m, X, Y, Z(控制点)
第16页/共106页
第17页/共106页
二、基本关系式 共线条件方程式
x f a1( X X s ) b1(Y Ys ) c1(Z Zs ) a3( X X s ) b3(Y Ys ) c3(Z Zs )
q y1 y2
常用的仪器:steko 1818、HCT-1( 20 m )
PSK2( 1 m )等
第4页/共106页
上下视差(q)读数鼓
左右视差(p)读数鼓
x读数鼓 X手轮
Y手轮
上下视差环
Steko 1818 型立体坐标量测仪
第5页/共106页
左右视差手轮
立体坐标量测步骤
准备工作:标出像片坐标系,标出要量测的 像点位置(定向点、加密点、外业控制点)并 标明点号 像片归心:使像片坐标系的原点位于仪器坐 标系的已知位置(框标连线交点与旋转中心重合) 像片定向:像片平面坐标系与仪器坐标系的 轴系平行,记下仪器的X0、Y0、P0、Q0。
5.1 像点坐标量测 5.2 单像空间后方交会 5.3 立体像对的前方交会 5.4 立体像对的解析法相对定向 5.5 立体模型的解析法绝对定向 5.6 双像解析的光束法严密解
第1页/共106页
• 5.1 像点坐标量测 第2页/共106页
• 用于量测像点坐标的仪器称为立体坐标量测仪。分为普通立体坐标量测仪和 精密立体坐标量测仪。
y f a2 ( X X s ) b2 (Y Ys ) c2 (Z Zs ) a3( X X s ) b3(Y Ys ) c3(Z Zs )
已知值 : x0 , y0 , f , m, X, Y, Z(控制点)
《摄影测量学中》课件

环境保护与监测
利用摄影测量技术可以对环境进行实时监测和评估,但需要解决大面积、快速获取和处 理数据的问题。
灾害救援与应急响应
在灾害救援和应急响应中,摄影测量能够快速获取灾区影像,为救援工作提供决策支持 ,但需要提高数据传输和处理的效率。
提高摄影测量学的精度与效率的方法
01
优化数据处理算法
02
采用高性能计算技术
古建筑测绘
通过摄影测量对古建筑进行精确测绘,为文化遗 产保护和修复提供数据支持。
文物考古调查
利用航空摄影测量技术对文物遗址进行调查和监 测,提高考古工作的效率和准确性。
历史地理研究
通过遥感影像和地理信息系统技术,研究历史时 期的文化遗产分布和演变。
自然灾害监测与评估中的应用
地震灾害监测
利用卫星遥感影像对地震灾害进行快速响应,监测灾区范围、房 屋倒塌和道路损坏等情况。
通过改进和优化数据处理算法,提高 摄影测量数据的处理速度和精度。
利用高性能计算技术,如云计算、并 行计算等,提高数据处理和分析的效 率。
03
加强数据融合与信息 提取
通过数据融合和信息提取技术,将不 同来源、不同类型的数据融合处理, 提高目标识别的准确性和可靠性。
THANKS 感谢观看
摄影测量学的基本概念
摄影测量学定义
01
摄影测量学是一门通过分析摄影影像获取地球表面信息、测绘
成果的科学。
摄影测量学发展历程
02
从模拟摄影测量到数字摄影测量的演变,以及数字摄影测量技
术的优势和应用。
摄影测量学与其他学科的关系
03
与地理信息系统、遥感、计算机科学等学科的交叉融合。
摄影测量学的基本原理
土地资源调查中的应用
利用摄影测量技术可以对环境进行实时监测和评估,但需要解决大面积、快速获取和处 理数据的问题。
灾害救援与应急响应
在灾害救援和应急响应中,摄影测量能够快速获取灾区影像,为救援工作提供决策支持 ,但需要提高数据传输和处理的效率。
提高摄影测量学的精度与效率的方法
01
优化数据处理算法
02
采用高性能计算技术
古建筑测绘
通过摄影测量对古建筑进行精确测绘,为文化遗 产保护和修复提供数据支持。
文物考古调查
利用航空摄影测量技术对文物遗址进行调查和监 测,提高考古工作的效率和准确性。
历史地理研究
通过遥感影像和地理信息系统技术,研究历史时 期的文化遗产分布和演变。
自然灾害监测与评估中的应用
地震灾害监测
利用卫星遥感影像对地震灾害进行快速响应,监测灾区范围、房 屋倒塌和道路损坏等情况。
通过改进和优化数据处理算法,提高 摄影测量数据的处理速度和精度。
利用高性能计算技术,如云计算、并 行计算等,提高数据处理和分析的效 率。
03
加强数据融合与信息 提取
通过数据融合和信息提取技术,将不 同来源、不同类型的数据融合处理, 提高目标识别的准确性和可靠性。
THANKS 感谢观看
摄影测量学的基本概念
摄影测量学定义
01
摄影测量学是一门通过分析摄影影像获取地球表面信息、测绘
成果的科学。
摄影测量学发展历程
02
从模拟摄影测量到数字摄影测量的演变,以及数字摄影测量技
术的优势和应用。
摄影测量学与其他学科的关系
03
与地理信息系统、遥感、计算机科学等学科的交叉融合。
摄影测量学的基本原理
土地资源调查中的应用
摄影测量学ppt课件
3.特征匹配
5
7-5 基于特征的影像匹配
一、点特征提取算法
点特征:明显的点,如角点、圆点 提取点特征的算子------兴趣算子或有利算子
1. Moravec 算子
---------利用灰度方差提取点特征。
通过逐像元量测与其邻元的灰度差,搜索相邻 像元之间具有高反差的点。
6
1)计算各像元的有利值IV,按四个方向计算相邻像元 间灰度差平方和,取最小的为该像元的有利值
影像分割:将
一维影像由若干影像段(特征段)组成。
影像分割成若 干子区域,每 个子区域都具 有一定的均匀
特征段由三个特征点组成。一个灰度梯
度变化最大的点 Z ,两个“突出点”
(灰度很小) S1, S2
性质对应于某
利用特征提取算子,提取特征(依次提
一物体或物体 的一部分。 S2
取三个特征点),将一行影像分割为若
Z
S1
22
2. 匹配窗口的构成
传统的影像匹配中,以影像窗口中心为匹配点。
跨接法的匹配窗口将两个窗口连接起来构成一个匹配窗口。
其中一个特征可以是已经匹配的特征 Fb,也可以是待匹配的
特征 ;另一个是待匹配的特征。
S2
S2
Z
Z
S1
S1
Fb Fe
Fb
Fe
这种窗口是随着影像的纹理结构而变化的。
23
1跨)待接匹法配匹的配特窗征始口终的位特于点边缘,不是窗口的中心;
配的特征
Fb 1 2
3 45
①构成目标窗口 Fb Fe
②确定 Fe 的备选特征 1,3 ③组成右影像的特征窗口 Fb 1; Fb 3
④右影像窗口重采样----以目标窗口为基准,使之于目标窗 口的大小一致,消除几何变形 ⑤相关匹配-----计算 Fb Fe与 Fb 1; Fb 3的相关系数, 取最大相关系数为匹配窗口,进而确定匹配的特征
《摄影测量基础知识》课件
摄影测量基本原理包括相对定 向、绝对定向、影像立体模型 构建、影像测量及精度分析。
摄影测量的数据获取
摄影测量的设备 摄影测量的数据处理流程
摄影测量中的摄影参数
航空及卫星遥感影像、数字相机、扫描影像仪等。
包括相对定向、绝对定向、立体模型构建、三维 测量以及误差分析和精度评价。
包括焦距、主距、透镜畸变、像点坐标等。
摄影测量的数据处理
数据处理方法
数字摄影测量使用计算机对影像 进行处理,包括同名点测量、影 像匹配、立体三角测量、DEM生 成等。
错误分析和精度评价
摄影测量中的误差来源包括影像 畸变、摄影量测误差和DEM精度 误差等,需要进行错误分析和精 度评价。
摄影测量的应用
摄影测量在地图制图、建筑设计、 环境监测、城市规划等领域上都 有广泛的应用。
摄影测量基础知识
本PPT课件将介绍摄影测量的基础知识,包括定义、基础原理、数据处理、应 用以及未来趋势和影响。
什么是摄影测量
1 定义
2 作用
摄影测量是一种基于摄影 的测量方法,用于从影像 中测量物体的坐标、形状、 大小和位置等特征。
摄影测量可用于制作高精 度地图、评估路网、监测 建筑物变形、计算土地利 用、测量水体面积等众多 领域。
3 应用
摄影测量广泛应用于地理 信息、测绘、城市规划、 环境监测、农业等领域。
摄影测量的基础知识
光学基础知识
摄影测量需要了解光学基础知 识,例如相机的光学结构、感 光几何基础知 识,例如坐标和距离的计算、 三角形成像原理、投影变换等。
摄影测量的基本原理
1
最新进展
数字化、智能化、自动化、精确化是摄
未来趋势
2
影测量技术的最新趋势,立体匹配和对 象提取等技术将得到更广泛的应用。
摄影测量学ppt课件
三维景观图
编辑课件
25
三峡景观图:三条航带 、175张航空影像
编辑课件
26
摄影测量:分类
按距离远近
航天摄影测量 航空摄影测量 地面摄影测量 近景摄影测量 显微摄影测量
按用途
地 形摄影测量 非地形摄影测量
模拟摄影测量
按处理手段 解析摄影测量
数字摄影测量
编辑课件
27
航空摄影测量
编辑课件
28
航天摄影测量
因为航摄仪是用来从空中对地面进行大面积摄影的,所 摄取的影像又必须能满足量测和判读的要求,因此,无论航 摄仪的结构或是摄影物镜的光学质量都与普通相机有重大的
区别。其像幅均为23X23cm,并备有四种不同焦距的物镜
筒,其中焦距为153mm的物镜筒有两个。
编辑课件
13
ADS40 数字航摄仪
编辑课件
14
36
§1.2 摄影测量与遥感的发展历程
准确恢复两张影像的位置关系
快速确定两张影像上的同名点
A
a1 a2
S1
S2
编辑课件
37
摄影测量学的三个发展阶段
模拟摄影测量(1851-1970)
解析摄影测量(1950-1980)
数字摄影测量(1970-现在)
编辑课件
38
编辑课件
39
摄影测量学的起源
❖ 1839年,法国人达盖尔发明摄影术为摄影测量提供了基本手段 ❖ 1851年,法国陆军上校劳赛达提出交会摄影测量并测绘了万森城堡
各种类型 传感器
被摄物体 影像
通过量测和 解译过程
自然物体及其环境的可靠信息
DEM
DLG编辑课件
DRG
DOM 7
摄影测量与遥感-ppt.
1、利用立体像对两张像片的 相对方位元素,计算模型点 的三维坐标;
2、利用立体像对两张像片 的外方位元素,计算地面点 的地面坐标。
o1 a1
o2 a2
S1
S2
AA
Z
Y
B
S
BX
Z Y X aP1
Z
Y
S
X
BZ
BY
Z
P2
a
X X
Y
Z
Z
Y X A X Y
X NX BX X BX N X
XT XT
XS XS
) b1(YT ) b3(YT
YS YS
) c1( ZT ) c3( ZT
ZS ZS
) )
y
f
a2(
XT
XS
)
b2 (YT
YS
) c2(
ZT
ZS
)
a3( XT X S ) b3(YT YS ) c3( ZT ZS )
(X(TX,Y,YT ,,ZZT ) A
③立体量测观察系统
3、分像方法
②互补色法
3、分像方法
③偏振光法
3、分像方法
④交替光阑法 (闪闭法、光闸法)
量测的内容:
像点坐标量测、左右视差量测、上下视差量测。借助于有测
量标志的量测工具或仪器进行。
测标
测标的作用
测标的种类
1、什么叫单像空间后方交会 利用地面控制点及其在片像上的像点,确定像
匹配方法基 基于 于特 灰征 度的 的影 影像 像匹 匹配 配((小影区像域特内征影为像匹灰配度基分础布) 为匹配基础)
匹配点确定的基础:匹配测度。基于不同的理论可以定义各 种不同的匹配测度,因而形成了各种影像匹配方法