零点与极点计算和分析
搞懂极点和零点

搞懂极点和零点在我的学术⽣涯中,我注意到系统理论是最难教和最难学的课程之⼀。
这些极点和零点概念在课堂上都感觉很有意思,但是⼀旦学⽣想将它们与实验室中的物理电路联系起来,理论和实践之间就会出现鸿沟。
在这篇⽂章中,我将尝试找出关于极点和零点的物理感觉,使⽤运算放⼤器来控制它们在复平⾯中的位置,并利⽤电路的⾃然响应来说明极点/零点位置的影响。
单端⼝电路的⾃然响应我们来看图1中的⽆源线性单端⼝电路,它包括电阻、电容和电感。
精品翡翠源头直供,⼀件也是批发价,⽀持鉴定⼴告图1:(a)⽆源单端⼝电路(b)⾃然(或⽆源)开路响应vn(t)。
如果我们施加⼀个测试电流I(s),单端⼝电路将产⽣电压V(s),使得V(s)=Z(s)/(s),其中I(s)和V(s)是所施加电流和所产⽣电压的拉普拉斯变换,s是以sec-1为单位的复数频率。
阻抗Z(s)是s的有理函数形式,即分⼦多项式N(s)与分母多项式D(s)的⽐值:展开剩余91%公式N(s)=0的根被称为Z(s)的零点,表⽰为z1,z2,……;⽽公式D(s)=0的根被称为Z(s)的极点,表⽰为p1、p2、……。
极点和零点统称为根,也称为临界频率。
例如,阻抗:当s=0时,其值为零;当s=-3±j4时,它具有复共轭极点对。
可以⽤根来表达它,即:如果我们绘制|Z(s)|相对于s的幅度曲线,则可以直观理解零点和极点的含义。
所得到的曲线就好像在s平⾯上竖起的帐篷,在零点处接触s平⾯,⽽在极点处其⾼度变为⽆限。
图2:Z(s)=(10Ω)s/(s2+6s+25)的幅度图。
(通过在虚轴上计算|Z|获得的分布曲线图显⽰出单端⼝电路的交流响应。
)为了找到极点的物理感觉,我们在s接近极点pk时施加电流I(s),就可以⽤相当⼩的I(s)获得给定的电压V(s)。
s越接近极点pk,获得给定电压V(s)所需的电流I(s)越⼩。
在s→pk的极限状态下,即使电流为零,即开路,单端⼝电路也会获得⼀个⾮零的供电电压(见图1b)!这个电压称为⾃然响应或⽆源响应,因为单端⼝电路可利⽤储存在其电容和电感内部的能量来产⽣电压。
LDO极点零点研究

U2
U1
0, N 0, M 1 RC N M 0
900
1 RC
1
RC
, N
2 RC ,
1
RC
, 45 ,
0
M
,
N
M
1
2
450
N 1, 0 M
例: 求一阶低通滤波器的频率特性
+
+
R C
U1
_
U2 _
1 U2 H (s) Cs 1 U1 R Cs
M1
1 p1 R1C1
M2
1 p2 R2C2
N1
1 1 R1C1 R2C2
高通
M2
p1 1 R1C1
M1
低通
1 p2 R2C2
k N1 H ( j ) e j (1 1 2 ) R1C1 M 1M 2
e(t ) Em sin 0t
幅度该变
r(t ) Em H0 sin(0t 0 )
相位偏移
H ( j0 ) H0e
j0
若 0 换成 变量
H ( j) H ( j) e
系统频率 特性
j ( j )
幅频特性
相位特性
用几何法求系统频率特性
H ( j ) k ( j z j )
j
H (s)
k (s z j )
m
p1
p0
p2
z1
z0
(s pi )
i 1
j 1 n
z2
§5.1 由系统函数的极零点分布决定
零点与极点的关系PPT课件

零点与极点的相互影响
零点对极点的影响
在函数图像上,零点是函数值为0的 点,而极点是函数值无穷大的点,因 此零点的位置会影响极点的位置。
极点对零点的影响
极点的位置也会影响零点的位置,因 为函数值在极点附近会变得非常大或 非常小,从而影响函数的零点。
零点与极点的性质比较
01
零点的性质
零点是函数值为0的点,是函数图像与x轴的交点。
2023
PART 05
总结与展望
REPORTING
零点与极点的重要性和意义
零点与极点在数学、物理和工程领域中具有广泛的应用,是解决复杂问题的关键。 零点与极点的概念和性质在数学分析、复变函数、信号处理等领域中占有重要地位。
零点和极点的分析有助于深入理解函数的性质、系统的稳定性和信号的传播等。
未来研究方向和展望
02
极点的性质
极点是函数值无穷大的点,是函数图像上凹凸性改变的点。
03
零点和极点的关系
在函数图像上,零点和极点可以重合,也可以不重合。如果重合,则该
点既是函数的零点也是函数的极点;如果不重合,则该点只可能是零点
或只可能是极点。
2023
PART 03
零点与极点的应用
REPORTING
在信号处理中的应用
2023
PART 04
零点与极点的实际案例
REPORTING
信号处理中的零点与极点案例
总结词
信号处理中的零点与极点案例展示了零点与极点在信号处理中的实际应用和影响。
详细描述
在信号处理中,零点和极点是影响信号频域特性的重要因素。零点可以改变信号的相位,而极点则影响信号的幅 度。通过在信号处理过程中合理地设计零点和极点,可以实现信号的滤波、均衡、调制和解调等操作,从而提高 信号的质量和性能。
分析零点,极点,偶极子对系统性能的影响
一. 高阶系统暂态性能分析
1.1.当闭环系统的零极点都位于 s 平面的左半部分时,则闭 环系统是稳定的。但当闭环极点距离虚轴的距离不同时,对系 统的暂态性能影响不同 高阶系统闭环传递函数:
高阶系统单位阶跃响应:
高阶系统单位阶跃响应:
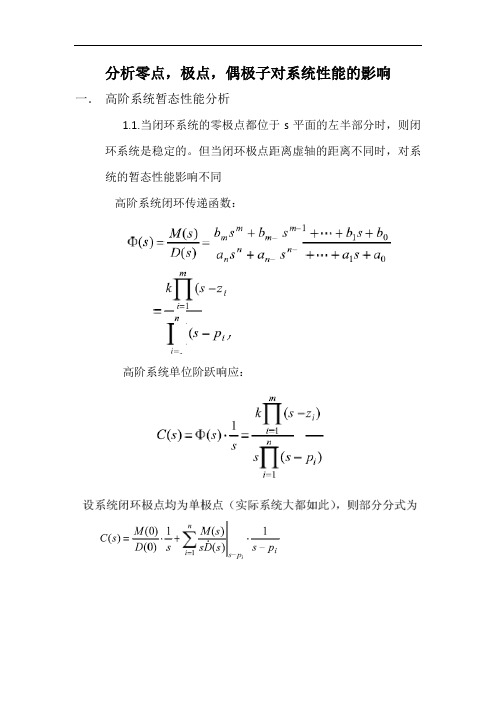
1.2 设闭环传递函数 原闭环传递函数 1.1 φ s = 5/(s ∗ s + 2 ∗ s + 2)(s + 3) 增加零点传递函数 1.2 φ1 s = 5(s + 1)/(s ∗ s + 2 ∗ s + 2)(s + 3) 增加极点传递函数 1.3 φ2 s = 5/(s ∗ s + 2 ∗ s + 2)(s + 10)(s + 3) 增加偶极子传递函数 1.4 φ3 s = 5(s + 0.95)/(s ∗ s + 2 ∗ s + 2)(s + 1)(s + 3) 1.3 系统单位阶跃响应曲线如图 1-1 所示 实线������(������ ) 虚线 -----------------������1(������ ) 点画线 ������2(s ) 1.4 1.3 1.2����� ������������ 主要取决这些极点所对应的分量。
增加较远的零点图 1-2 1.4.2 增加极点 对比图 1-1 中������(������ ) ,������2(������ ) 对应的响应曲线,发现二者十分接近, 其暂态性能指标 ������������ 2 = 2.85������������ 2 = 3.66������������2 = 4.45 与������1(������ ) 的性能指标几乎相等。增加的极点为 s=-10,离虚轴较远,对系 统的暂态性能较小。 增加极点的距离虚轴的距离不同对系统的动态性 能影响也不同。图 1-3 增加的极点为 s=-1,离虚轴较近,对系统的暂态 性能影响较大。其动态性能指标如下
关于零点和极点的讨论

关于零点和极点的讨论
一、传递函数中的零点和极点的物理意义:
零点:当系统输入幅度不为零且输入频率使系统输出为零时,此输入频率值即为零点。
极点:当系统输入幅度不为零且输入频率使系统输出为无穷大(系统稳定破坏,发生振荡)时,此频率值即为极点。
二、每一个极点之处,增益衰减-3db,并移相-45度。
极点之后每十倍频,增益下降20db.零点与极点相反;每一个零点之处,增益增加3db,并移相45度。
零点之后,每十倍频,增益增加20db。
闭环增益A0:a/1+ab=1/b(当a很大时),其中a为开环增益,b为反馈因子,可以理解为反馈
量和输出量的比值,当开环增益趋近于无穷大时,闭环增益就是反馈因子的倒数。
环路增益:T=a*b
三、对运放来说:闭环增益(1/b)的传递函数的零点是环路增益(ab) 传递函数的极点;闭环增益的传递函数的极点是环路增益传递函数的零点;而我们在反馈的时候,是希望在相位下降到180度之前,环路增益大于一,所以我们需要消除一个环路增益函数的极点(即闭环增益零点),以免发生震荡。
零点极点的计算公式

零点极点的计算公式
计算零点和极点是在控制系统和信号处理中非常重要的任务。
零点和极点是系统的特征,它们对系统的稳定性和动态响应有着重
要的影响。
在控制系统理论中,可以使用传递函数来表示系统的动
态特性。
传递函数通常表示为H(s),其中s是复变量。
零点和极点
可以从传递函数中直接确定。
对于一个一般的传递函数H(s),可以表示为H(s) = N(s)/D(s),其中N(s)和D(s)分别是分子和分母多项式。
零点是使得传递函数为
零的s值,即N(s)=0的解。
极点是使得传递函数的分母为零的s值,即D(s)=0的解。
计算零点和极点的具体公式取决于传递函数的形式。
对于一阶
系统和二阶系统,可以直接从传递函数的表达式中找到零点和极点。
对于高阶系统,通常需要使用数值方法或者计算工具来找到零点和
极点。
总的来说,计算零点和极点的公式可以通过传递函数的分子和
分母多项式来确定,具体的计算方法取决于系统的阶数和形式。
在
实际工程中,通常会使用计算工具来进行零点和极点的计算,以便更准确地分析系统的特性和性能。
第五章S域分析,极点与零点

p1
j ω1
0
h(t)
σ
0
−α
p2
− jω1
−αt
t
ω1 H (s) = 2 2 ( S + α ) + ω1
h(t ) = e sinω1t.u(t )
(2) 几种典型的极点分布 ) 几种典型的极点分布—— (g)共轭极点在右半平面 共轭极点在右半平面 共轭极点在 jω h(t) jω1 p1
(1)一阶系统 )
s − z1 H ( s) = K s − p1 s H ( s) = K s − p1
♦ 一零点,一在实轴的 一零点,
极点
♦ 一在原点的零点,一 一在原点的零点,
在实轴的极点
♦ 只有无穷远处的零点
k H (s) = s − p1
一在实轴的极点
例:求一高阶系统的频率特性
+ U1 — C R + U2 —
e(t )
τ
e(t)
t
R
C
v0 (t )
T
(1)求e(t)的拉氏变换 ) 的拉氏变换
1 1 (1 − e ) −sτ −snT E (s) = (1 − e )∑ e = −sT s s (1 − e ) n=0
∞
− sτ
(2)求系统函数 )求系统函数H(s)
H (s) = 1 Cs R+ 1 Cs
激励E(s)的极点影响
♦ 激励 激励E(s)的极点也可能是复数 的极点也可能是复数 ♦ 增幅,在稳定系统的作 增幅,
用下稳下来,或与系统 用下稳下来, 某零点相抵消 ♦ 等幅,稳态 等幅,
♦ 衰减趋势,暂态 衰减趋势,
Re[ pk ] > 0 Re[ pk ] = 0 Re[ pk ] < 0
滤波器设计中的滤波器阻带和通带的零点和极点位置分析

滤波器设计中的滤波器阻带和通带的零点和极点位置分析在滤波器设计中,滤波器的阻带和通带是两个重要的概念。
阻带是指滤波器在频率范围内对信号进行衰减的区域,而通带则是指滤波器在频率范围内对信号进行通过的区域。
为了理解滤波器的性能和工作原理,了解阻带和通带中的零点和极点位置是至关重要的。
一、零点和极点的概念在滤波器设计中,零点和极点是描述滤波器特性的重要参数。
零点(Zero)是指滤波器频率响应函数中使得函数值为零的点,极点(Pole)则是指滤波器频率响应函数中使得函数值趋于无穷大的点。
零点和极点位置的分布直接决定了滤波器的特性。
二、阻带和通带的零点和极点位置分析1. 零点和极点位置对通带的影响通带的设计是为了使得滤波器在该频率范围内对信号进行传输而非衰减。
对于理想的滤波器而言,通带内的频率响应函数值始终为1,因此在通带内不存在零点和极点。
2. 零点和极点位置对阻带的影响阻带的设计是为了使滤波器在该频率范围内对信号进行衰减。
在阻带内,滤波器的频率响应函数逐渐趋近于零。
a. 零点位置对阻带的影响在阻带中,零点的位置对滤波器的衰减特性有着直接的影响。
当零点位置位于阻带范围内时,可以有效地抵消频率响应函数的分母项,使得滤波器的衰减更加明显。
因此,合理选择零点位置可以改善滤波器的衰减性能。
b. 极点位置对阻带的影响极点位置也对滤波器的衰减特性有一定的影响。
当极点位置位于阻带范围内时,会导致频率响应函数的分母项出现零点,从而使得滤波器的衰减性能减弱。
因此,在设计阻带时应尽量避免极点位置位于阻带范围内。
三、总结滤波器的阻带和通带零点和极点位置的分析对于滤波器设计具有重要的指导意义。
合理选择零点和极点的位置可以改善滤波器的性能,使其更好地满足实际需求。
因此,在滤波器设计过程中,需要仔细分析滤波器的阻带和通带,以确定零点和极点的位置,并据此进行优化设计。
通过对滤波器的阻带和通带的零点和极点位置的分析,可以更好地理解滤波器的工作原理,为滤波器设计提供有效的参考依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于放大器极、零点与频率响应的初步实验1.极零点的复杂性与必要性一个简单单级共源差分对就包含四个极点和四个零点,如下图所示:图1 简单单级共源全差分运放极零点及频率、相位响应示意图上图为简单共源全差分运放的极零点以及频率响应的示意图,可以看到,运放共有四个极点,均为负实极点,共有四个零点,其中三个为负实零点,一个为正实零点。
后面将要详细讨论各个极零点对运放的频率响应的影响。
正在设计中的折叠共源共栅运算放大器的整体极零点方针则包括了更多的极零点(有量级上的增长),如下图所示:图2 folded-cascode with gain-boosting and bandgap all-poles details图3 folded-cascode with gain-boosting and bandgap all-zeros details从上述两张图可以看到,面对这样数量的极零点数量(各有46个),精确的计算是不可能的,只能依靠计算机仿真。
但是手算可以估计几个主要极零点的大致位置,从而预期放大器的频率特性。
同时从以上图中也可以看到,详细分析极零点情况也是很有必要的。
可以看到46个极点中基本都为左半平面极点(负极点)而仿真器特别标出有一个正极点(RHP )。
由于一般放大器的极点均应为LHP ,于是可以预期这个右半平面极点可能是一个设计上的缺陷所在。
(具体原因现在还不明,可能存在问题的方面:1。
推测是主放大器的CMFB 的补偿或者频率响应不合适。
2。
推测是两个辅助放大器的带宽或频率响应或补偿电容值不合适)其次可以从极零点的对应中看到存在众多的极零点对(一般是由电流镜产生),这些极零点对产生极零相消效应,减少了所需要考虑的极零点的个数。
另外可以看到46个零点中45个为负零点,一个为正零点,这个正零点即是需要考虑的对放大器稳定性产生直接影响的零点。
以上只是根据仿真结果进行的一些粗略的分析,进一步的学习和研究还需要进行一系列实验。
1. 单极点传输函数——RC 低通电路首先看一个最简单的单极点系统——RC 低通电路,其中阻值为1k ,电容为1p ,传输函数为:sRCs H +=11)( 则预计极点p0=1/(2πRC )=1.592e8 Hz ,仿真得到结果与此相同。
而从输出点的频率响应图中可以得到以下几个结论:图4 一阶RC 积分电路1)-3dB 带宽点(截止频率)就是传输函数极点,此极点对应相位约为-45°。
2)相位响应从0°移向高频时的90°,即单极点产生+90°相移。
3)在高于极点频率时,幅度响应呈现-20dB/十倍频程的特性。
图5 一阶RC 电路极点与频率响应(R=1k C=1p )2. 单极点单零点系统——CR 高通电路简单的一阶CR 电路,阻值/容值不变,传输函数为sRCsRC s H +=1)( 预计系统存在单极点p0=1/2πRC ,单零点z0=0,仿真得到单极点 1.592e8 Hz ,单零点8.835e-6 Hz ,极点位置同RC 电路,零点位置可以理解为一个无限趋近于零的值。
从频率响应曲线中同样有以下结论:图6 一阶CR 电路图7 一阶CR 电路幅频、相频响应 (C=1p R=1k )1)频率为0Hz (零点)时幅度为0(换算为dB 时为负无穷大,故零点只能用一个ε小数表示),-3dB 带宽(下截频)即为极点所在,对应相位45°。
2)相位响应从90°移向高频时的0°,即单极单零系统产生-90°相移。
(可以这样理解,零点使系统已经从极低频的180°相移并稳定到90°,然后单极点最终产生-90°相移,使相位最终稳定在0°)3)零点频率之上,极点频率之下,幅度响应为+20dB/十倍频,极点频率之上为0dB 。
结合单极点系统-20dB/十倍频的幅度响应特性可知,零点产生+20dB/十倍频的特性,并且极零点对幅度响应的影响可以叠加。
(证明:1lg(*20||sRCsRC dB Av += 极低频时,极点不起作用,即1>>sRC从而)lg(*20)1lg(*20)lg(*20||sRC dB sRC dB sRC dB Av ≈+−=于是|Av|=20dB*lg(s) +C (即低频时为+20dB/十倍频)高频时,sRC>>1,从而11≈+sRCsRC ,于是|Av|=0。
) 3. 两阶RC 系统以上看到的一阶RC/CR 电路均为最简单的非线性系统。
R 和C 的任意组合将可能产生极为复杂的系统,分析其传输函数将是一个求解高阶线性方程组的过程,使得精确的手算分析基本不可能。
但是对于实际应用的单极或多极放大器来说,其RC 拓扑结构有其特殊性,一般都是π形电容结构,如下图:这相当于一个两级放大器的电容电阻负载图。
其中两纵向电容为两级放大器的容性负载,横向电容为包括Cgd 结电容和补偿电容在内的密勒电容。
而且一般来说横向电容的值远大于两纵向电容。
这将可能使两个极点的位置相隔较远,从而可能可以采用某种近似来估算。
因此研究这样一个系统有实际意义。
(注意一个单纯这样的网络只图8 π形RC 网络 是一个微分器高通网络,适合放大器的两级π模型还应该加上一个压控电流源。
首先考察没有横向电容,仅有两个纵向电容的情况。
原理图如下:图9 两阶RC 网络这个原理图同上述π网络稍有不同。
注意到如果R2不是横向连接的话系统将为单极点系统(两个C 并联为一个电容)。
为了使实验结果更加清晰,对这两个电容做了量级上的处理,即两纵向电容值分别为1u 和1p ,电阻值均为1k 。
这样做的理由是使两个极点分离得比较远。
仿真得到系统包含两个极点1.592e2 Hz 以及1.592e8 Hz ,正好分别是和。
对于这个系统尚可用手算精确求得极点所在。
运用KVL 和KCL ,最后求解极点方程:111)2(−C R π122)2(−C R π01)1(221111212212=++++C R C R C R C C R C C s s 在C1>>C2的假设下,这个方程的解可以近似得到为1/R1C1和1/R2C2,与仿真结果相同。
但是应该看到,在两级时间常数相近的情况下,无法运用以上近似。
该传输函数的频率响应图如下:图10 两阶RC 系统幅频、相频响应图从上图中可以得到以下结论:1)低频时幅度为0,相位也为0°;-3dB 带宽为159Hz ,即为第一极点所在(称为主极点),主极点对应相位为-45°;主极点之后的一段幅度响应呈现-20dB/十倍频特性。
这些结论同前面得到的结论类似。
2)由于经过设计,使两个极点分离较远,因此在频率f 满足p0<<f<<p1时,相位响应为-90°的平台,这是由于主极点的相位移动作用产生。
3)幅度响应曲线存在明显的拐点。
第二极点处(次极点)对应相位为-135°,即在-90°平台的基础上再次移动-45°,在幅度响应对应次极点处向上移动3dB,可以看到近似为幅度响应曲线的拐点所在。
该拐点对应的相位点无明显特征。
4)次极点之后的幅度响应呈现-40dB/十倍频的特征,可以证明为两个极点对幅度响应的效果的叠加。
对相位响应,在经过一定的相移之后相位响应稳定于-180°可以预期每个极点将使相位响应最终相移-90°。
根据上述得到的幅频、相频响应曲线可以进行一些推测和思考。
1)由于极点对幅度响应的影响表现为-20dB/dec,因此对一个实际的放大器来说,如果知道了低频增益Av和主极点,如果在主极点和第二极点之间不存在其他极零点的影响(关键是主极点和次极点之间不存在一个正零点),那么知道了Av和主极点,就可以对放大器的单位增益带宽做一个预期,如采用-20dB/dec或-6dB/octave估算。
但从根本上这样估算的理由是放大器的带宽增益积是一个常数。
2)值得注意的是放大器的单位增益带宽点不是也不应该是次极点,与相位的对应(关系到相位裕度)也没有直接的关系。
相关实验将在后面说明。
3)回想相位裕度的定义是放大器在单位增益带宽处对应的相位值同-180°(-180°还是0°需要看低频相位)的差。
因此,如果放大器的单位增益带宽恰好就是次极点的所在,那么相位裕度为45°,正好够了闭环稳定性的下限。
考虑到实际中45°的取值是绝对不够的,应该提供更大的相位裕度如65°,则单位增益带宽点应该在次极点之内。
——这也是单位增益带宽不应该是次极点的理由。
同时可以推论,次极点实际决定了放大器的最大带宽。
因此,如果AC仿真的带宽范围是从低频到单位增益带宽处,应该看到-20dB/dec才是理想情况(实际中可能包含极零点对,这样的响应很难得到)。
4)进一步推论:由于单极点系统相位最终将停留在90°,故单极点系统总是闭环稳定的,即相位裕度至少为90°。
4.单级共源、电阻负载、有输入阻抗的单管放大器频率响应左图是一个单级共源放大器,为了将问题简单化,没有采用实际中使用的有源负载或者二极管负载。
这样可以减少负载管结电容的影响。
Rs为信号源内阻,在计算放大器频率响应时,一般会用到密勒定理,即对于连接输入和输出的电容(相当于反馈电容,本例中为Cgd)Cf来说,当考虑输入端时间常数时,等效为输入端并联一个电容为Cm=(1+|Av|)Cf的电容,同时可以取消反馈电容;而考虑输出端时间常数时,等效为在输出端并联一个电容为f M C Av C )||11(−=的电容。
这样可以化为两个简单的一阶RC 系统进行估算,将问题简化。
不过应该注意的是两个等效(输入端和输出端)不能同时使用,即当估算输入端时间常数时,输出端仅应并联实际的负载电容,不应再考虑Cm=(1-1/Av )Cf 电容的影响。
而且应注意密勒定理仅能用来快速估算输入、输出时间常数,而将会漏掉一个零点,即密勒定理只考虑了极点情况而没有考虑零点情况。
但在实际应用中,密勒定理仍有实际价值,因为对放大器的频率响应常常更关心极点的情况。
首先采用密勒定理估算放大器的极点情况。
采用analogLib n33模型仿真。
输入nmos 管为8u/0.4u ,Rs=100k ,负载电阻RL=5k 。
低频增益|Av|=6.2,mos 管跨导gm=1.33485m 。
其中由仿真得到输入电容Cgs=11.3661f ,Cdb=1.09277a ,Cgd=3.0496f ,Cgb=1.04188f 。
仿真得到两个极点,分别为:p0=4.61588e7 Hz ,p1=1.15656e10 Hz ,得到一个零点为z0=6.82626e10 Hz 。