交通流问题数学模型
现代交通工程中的交通流数学模型及其应用
现代交通工程中的交通流数学模型及其应用随着城市化进程的加快,交通问题也变得越来越突出。
解决交通问题是现代城市建设的重要组成部分,而交通工程中的交通流数学模型则成为了解决交通问题的关键之一。
本文将讨论现代交通工程中的交通流数学模型及其应用。
一、交通流数学模型的理论基础交通流数学模型是交通工程中应用较为广泛的模型之一,其理论基础主要包括宏观交通流模型和微观交通流模型。
1.宏观交通流模型宏观交通流模型是从全局上对交通流进行描述的,通过对交通流的整体性质进行研究,揭示其内在的规律性。
常见的宏观交通流模型有流量-密度-速度模型(Fundamental Diagram),其中流量代表单位时间内通过路段的车辆数,密度则表示在该路段上车辆的平均密集程度,速度则代表车辆在该路段上的行驶速度。
2.微观交通流模型微观交通流模型是对单个车辆在路段上的行驶状态进行描述的,通过对车辆间运动的交互作用进行研究,从而推断出交通流的总体属性。
常见的微观交通流模型有Car-Following模型和Lane-Changing模型。
二、交通流数学模型的应用领域交通流数学模型的应用领域非常广泛,涉及到交通规划、交通管理、交通控制、交通安全等多个方面。
1.交通规划交通规划是指对城市交通体系进行计划和设计的过程,交通流数学模型可以很好地模拟城市交通体系,从而评估不同规划方案对城市交通运行的影响,为决策提供科学依据。
2.交通管理交通管理是指对城市交通运行过程进行全面管理和协调的过程,交通流数学模型可以对城市交通运行状态进行实时监测和分析,从而调整交通信号配时、路段限行等管理措施,提高城市交通运行效率。
3.交通控制交通控制是指采取控制措施来调节和引导交通流的运行,交通流数学模型可以通过对交通流进行分析和预测,从而制定出合理的控制方案,提高交通流的运行效率。
4.交通安全交通安全是指保障交通运行安全,减少交通事故的发生,交通流数学模型可以分析交通流的运行状态,识别出交通事故易发路段和易发时段,从而提高交通安全水平。
交通流流体力学模型
交通流流体力学模型交通流流体力学模型是研究交通流动的数学模型,通过对交通流的运动规律和特性进行建模和分析,可以帮助我们更好地理解交通系统的运行机理,并提供科学的决策依据。
在交通流流体力学模型中,我们将交通流看作是一种流体,交通参与者(如车辆、行人等)相当于流体粒子,而道路网络则相当于容器。
通过对流体力学的研究方法和理论的运用,可以对交通流的运动进行建模和仿真,从而揭示交通流的行为模式和规律。
交通流流体力学模型主要包括两个方面的内容:宏观模型和微观模型。
宏观模型主要关注整体交通流的运动特性和性能,通过对交通流的密度、速度和流量等宏观指标的研究,来描述交通流的整体行为。
而微观模型则更加注重个体交通参与者的行为和决策过程,通过对车辆运动的微观规则和交互行为的建模,来模拟交通流的微观行为。
在交通流流体力学模型中,我们可以使用诸如流量-密度关系、速度-密度关系和流量-速度关系等基本规律来描述交通流的运动特性。
例如,根据流量-密度关系,当道路上的车辆密度增加时,流量也会增加,但当密度达到一定程度时,流量会出现饱和现象,即流量不再增加。
这种关系可以通过实测数据和统计分析得到,并用数学模型进行描述。
交通流流体力学模型还可以考虑一些特殊情况和因素的影响,如交通信号灯、交叉口的影响等。
通过对这些因素的建模和分析,可以预测交通流的运动状态,并为交通管理和规划提供科学依据。
例如,可以通过模型来优化信号灯的配时方案,以减少交通拥堵和提高交通效率。
交通流流体力学模型的研究对于交通管理和规划具有重要的意义。
通过对交通流动的建模和分析,可以帮助我们更好地理解交通系统的运行机理,为交通管理者提供科学的决策依据。
同时,交通流流体力学模型也可以用来评估交通政策和措施的效果,从而指导交通规划的制定和实施。
交通流流体力学模型是研究交通流动的重要工具和方法,通过对交通流的运动规律和特性进行建模和分析,可以帮助我们更好地理解交通系统的运行机理,并提供科学的决策依据。
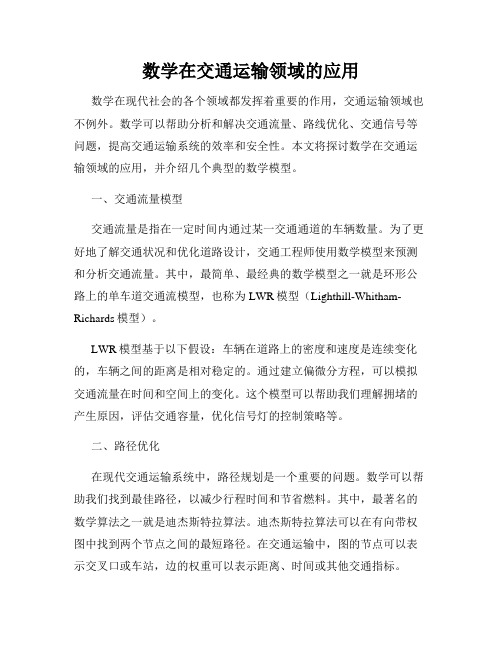
7交通流量、速度和密度之间的关系

极大流量 Qm 临界速度 Vm 即流量达到最大值时对应的速度 最佳密度 Km 即流量达到最大值时对应的密度
阻塞密度Kj 即车流密集到所有车辆无法移动时 的速度 畅行速度Vf 即车流密度趋于零,车辆可畅行无阻 时的平均速度
一、直线关系模型——车流密度适中
假定 V=a-bK 当K=0时,V值可达到理论最高速度,即畅行速度Vf, 即K=0,a=Vf 当密度达到最大值,K=Kj时,车速为0,
状态交通量最大qmkmvm2400二对数关系模型车流密度很大v三指数模型车流密度很小四广义速度密度模型n是大于零的实数当n1时为线性关系式第三节交通流量密度的关系数学模型qkqmkjkmk0q0k增大q增大kkmqqmk增大q减小kkjq0斜率最大车速最高不拥挤拥挤第四节速度交通流量的关系数学模型qvqmvfvmq0vvfk增大q增大v减小qqmvvmk增大q减小v减小不拥挤拥挤kkjq0v0
二、对数关系模型——车流密度很大
V
K V = V m ln( K
j
)
K
三、指数模型——车流密度很小
V
K
j
V =Vf (1-e
Km
)
K
模型缺点:当
K K j 时, V 0,需修正
四、广义速度-密度模型
K K
j n
V =Vf(1-
)
n是大于零的实数,当n=1时,为线性关系式
第三节 交通流量-密度的关系
数学模型
Q = KV = KV f ( 1 K K
j
)=Vf(K -
K K
2
)
j
Q Qm 斜率最大 车速最高
K增大, Q增大
K=Km Q=Qm K增大, Q减小
数学在交通科学中的应用
数学在交通科学中的应用在现代社会中,交通问题一直是重要的研究领域之一。
为了更好地解决城市交通拥堵、提高交通效率和保障道路安全,数学被广泛应用于交通科学中。
本文将探讨数学在交通科学中的应用,并介绍几个常见的数学模型和方法。
一、交通流模型交通流模型是交通工程中的核心元素之一,其目的是描述车辆在道路网络中的运行状态。
通过数学建模,我们可以更好地理解交通流特性、分析交通拥堵状况,并设计出相应的交通控制策略。
在交通流模型中,连续模型和离散模型是两种常见的数学方法。
连续模型使用偏微分方程来描述交通流的演化过程,其中最著名的是Lighthill-Whitham-Richards(LWR)模型和守恒-守恒模型。
离散模型则基于概率和统计方法,通过建立车辆之间的相互作用来描述交通流。
著名的离散模型包括Cellular Automaton(CA)模型和Microscopic Traffic Simulation(MTS)模型。
二、交通信号优化交通信号优化是提高交通效率的重要手段之一。
通过合理设置信号配时方案,可以减少交通拥堵、提高交通吞吐量,并优化交通流分配。
数学中的最短路径算法在交通信号优化中有广泛的应用。
例如,Dijkstra算法可以用于求解最短路径问题,从而确定交通信号的相位和配时。
此外,进化算法和遗传算法等优化算法也可以用于交通信号优化,通过不断迭代找到最优的信号配时方案。
三、交通网络设计交通网络设计是指根据交通需求和交通规划,合理设计道路网络结构和交通线路,以满足人们的出行需求。
图论是数学中研究网络结构的重要工具。
在交通网络设计中,图论可以帮助我们分析交通网络的拓扑特征、计算最优路径和最小生成树,并进行网络优化。
例如,最小生成树算法可以用于确定交通网络中的主要道路和交通枢纽,从而提高整体的交通效率。
四、交通仿真模拟交通仿真模拟是利用计算机模拟交通实际情况,以评估交通控制策略的效果和验证交通管理方案的可行性。
江苏省考研交通工程复习资料交通流理论重要模型分析
江苏省考研交通工程复习资料交通流理论重要模型分析交通工程是一个与人们生活息息相关的学科领域。
在交通规划、交通流量管理以及交通安全等方面,交通工程师需要掌握交通流理论以便进行准确的分析和预测。
本文将对江苏省考研交通工程复习资料中的交通流理论重要模型进行分析,并探讨其应用。
一、交通流理论概述交通流理论是研究交通流动规律的一门学科,通过建立各种数学模型,以解决交通拥堵、交通信号控制、交通规划等问题。
其中,常用的交通流理论模型有流量-密度关系模型、速度-流量关系模型和速度-密度关系模型。
1.1 流量-密度关系模型流量-密度关系模型描述了道路上的车辆流量与车辆密度之间的关系。
常见的数学模型有线性模型、三角形模型和其他非线性模型。
通过实际数据的反复测量和分析,可以建立适合实际情况的交通流量-密度关系模型,并根据模型得出的结果进行交通规划和信号控制。
1.2 速度-流量关系模型速度-流量关系模型研究了车辆流量对道路上的车辆速度的影响。
在道路通行能力预测和交通控制中,速度-流量关系模型起到了重要作用。
常见的模型有Greenshields模型、Greenberg模型和Daganzo-Newell模型等。
这些模型可以帮助交通工程师对道路拥堵情况进行评估,并提出相应的交通管理措施。
1.3 速度-密度关系模型速度-密度关系模型研究了道路上的车辆密度对车辆速度的影响。
一般情况下,车辆密度越大,车辆速度越低。
常用的模型有Greenberg模型、Daganzo-Newell模型和Underwood模型等。
通过建立速度-密度关系模型,交通工程师可以预测并规划道路的通行能力,以减少交通拥堵。
二、交通流理论重要模型分析在江苏省考研交通工程复习资料中,有几个重要的交通流理论模型值得特别关注。
2.1 Greenshields模型Greenshields模型是速度-流量关系模型中的经典模型之一。
它假设车辆在道路上的速度与车流量呈负线性关系。
第3章 交通流模型

§1 调查地点对数据性质的影响
一、调查位置对数据性质的影响
✓由于出口道有流量驶 出,因此,qC≤qB; ✓不会发生交通拥挤, ✓该位置可以获得不拥 挤时的交通数据。 ✓可见,调查位置对数 据的影响不容忽视。
q1
Ch2 交通流特性
q2
7
京石高速公路北京段观测点测出的一条车道上的数据。可见: 在流量的很大范围内,速度下降很小。在0~1000辆/h时,速 度仅下降了4km/h。流量在大于1300辆/h后,速度下降加剧。 当流量较小时,数据点十分分散,这是因为此时车辆行驶自 由度大,司机可自由选择其车速,以其期望车速行驶。在这 种情况下,车辆的机动性能的差异就显现出来,表现出车辆 速度离散性较大。另外,当流量接近车道的通行能力时,交 通流变得不再稳定,数据离散性进一步加大。
k
q kuf e km
显然:当 k=km时,q=qm
qm kmuf /e kmum
umuf /e
Ch2 交通流特性
15
3. 不连续曲线模型
由大密度交通和小密度交通两种不同的u-k模型,导出两 种q-k曲线。
两条曲线不连续,常出现在瓶颈路段。实测的流量密度 关系是间断的,出现“反λ” ,两个分支分别用来定义自 由流和拥挤流。
Ch2 交通流特性
24
§5 三维模型
u k
Q max
流量/Q 2
00
Vmax q
Vm
Vmax Vm
速度/V 0 1
3 0
0 K m K max 0 Qmax
密度/K
流量/Q
V K
qm
流量
2 00
Q
uf
um
uf um
速度
1 0
数学在交通运输领域的应用
数学在交通运输领域的应用数学在现代社会的各个领域都发挥着重要的作用,交通运输领域也不例外。
数学可以帮助分析和解决交通流量、路线优化、交通信号等问题,提高交通运输系统的效率和安全性。
本文将探讨数学在交通运输领域的应用,并介绍几个典型的数学模型。
一、交通流量模型交通流量是指在一定时间内通过某一交通通道的车辆数量。
为了更好地了解交通状况和优化道路设计,交通工程师使用数学模型来预测和分析交通流量。
其中,最简单、最经典的数学模型之一就是环形公路上的单车道交通流模型,也称为LWR模型(Lighthill-Whitham-Richards模型)。
LWR模型基于以下假设:车辆在道路上的密度和速度是连续变化的,车辆之间的距离是相对稳定的。
通过建立偏微分方程,可以模拟交通流量在时间和空间上的变化。
这个模型可以帮助我们理解拥堵的产生原因,评估交通容量,优化信号灯的控制策略等。
二、路径优化在现代交通运输系统中,路径规划是一个重要的问题。
数学可以帮助我们找到最佳路径,以减少行程时间和节省燃料。
其中,最著名的数学算法之一就是迪杰斯特拉算法。
迪杰斯特拉算法可以在有向带权图中找到两个节点之间的最短路径。
在交通运输中,图的节点可以表示交叉口或车站,边的权重可以表示距离、时间或其他交通指标。
通过应用迪杰斯特拉算法,交通规划师可以找到最佳路径,以避开交通拥堵,减少行程时间。
这对缓解城市拥堵和提高交通效率非常重要。
三、信号优化交通信号灯对交通流量的管理起着至关重要的作用。
数学可以帮助我们优化信号灯的控制策略,以最大程度地提高道路的通行能力。
在交通信号优化中,最常用的数学技术包括线性规划、动态规划和优化理论。
通过建立数学模型,可以考虑交通流量的变化、车辆的等待时间和道路的容量等因素,以确定最佳的信号灯控制策略。
除了上述三个典型的数学应用,还有其他一些数学模型用于解决交通运输领域的问题。
例如,排队论可以用于分析路口的车辆排队时间和服务能力,以评估路口的通行能力。
交通流问题数学模型的初级讨论

交通流问题数学模型的初级讨论材料科学与工程 01级 3010921002 郭杨 3010921074 柯小行一.一.摘要本篇用微观分析着眼于交通流运行中每一辆机动车的运动情况。
每一辆车被当作一个质点来处理。
这种处理方法的前提是已知每一辆车的位置,速度,和加速度。
本篇只讨论最简单的模型,即理想化为在一条平直公路上行驶的车辆,车辆之间不允许超车。
在t 〈=0的时候,所有车辆均以匀速行驶。
在t=0+时,领头的车开始偏离u0一段时间,这样就对原来稳定的状态产生了波动,使他们调节自身的速度来协调这种波动。
主要有以下两个方面: 1.1.对于连着的两辆车,在哪种情况下,前一辆车的偏离行为会导致后一辆车的过度补 偿行为?即后一辆车的调整是否超过了所需要的调整范围,从而产生了一种类似于钟摆式简谐运动的振动。
若这种振动的幅度不随时间衰减,就形成了车流问题的“局部稳定”。
2. 对于一列车辆,在哪种条件下,领头车辆引起的小小扰动会随着他的继续行驶而增 大,从而引起这一列中车辆之间的碰撞?这是车流问题中的渐进稳定性问题。
为了解决这两个问题,本篇将具体讨论解决时间滞后的不同方程。
二.背景现代社会的日常活动在极大程度上依赖于安全高效的交通流。
在过去的一些建模的例子中都有不同程度的讨论这个问题。
它能帮助降低交通阻塞和交通事故,从而实现更好的路况,设计出更好的交通灯体以及行之有效的交通法规。
本篇从简单的模型出发,分层逐步细化模型的讨论及求解,以期能对交通流问题作另一种特别的阐述。
三.建模及求解1.1.瞬时速度的控制取公路为x 轴,车辆运动的方向为x 正向。
)(t x n 为T 时刻第n 辆车的位置。
)()(t xt v n n = 且 0)(u t v n = )0(≤t 为方便起见,取一个参考系,以0u 的速度为参考速度0)()(u t v t u n n -=这样 0)(=t u n )0(≤t 即为初始条件做第一个近似处理,假设第N 辆车的司机根据它与前一辆车的相对速度来调整自身车速,则有()212u u u-=λ , ()323u u u -=λ , … (1.1) ()11++-=n n n u u uλ , n=1,2,3,…N (1.2) 作为一个简单的模型,假设所有司机反应灵敏程度相同,即λ一致,是一个常数,据有关实验,(GENERAL MOTORS 所做的实验),λ介于14.0~3.0-s 之间,取137.0-=s λ一旦领头的车偏离0u 则由初始条件及通式(6.2)可依次算出),(t u n (n=1,2,3,…N)对于整个车流问题,我们关心的是它的稳定性,即领头车辆的扰动会不会引起放大,因此我们假设,sin )(1t t u ω=并展开成傅力叶级数,有 [])s i n (s i n )(222φωφλ-+=-t e u t u t其中u 为振幅,2φ为初相,且22/122cos )1(φλω≡+=-u (1.4) 由于∞→t 时,u u ≤2 由 (1.3) 有[]{})2sin()2sin()(2223φωωφλ-++=-t e t u t u t (1.5)同理 ,∞→t 23)(u t u ≤ ; 以此类推, 1,-≤∞→k k u u t由于 ,1<u 当k 与t 很大, )(t u k 将相当小因此有结论:任何由领头车辆产生的扰动,都不回随着车辆的运行而被放大, 这个结论从显示意义上来看显然是错误的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数学模型与数学实验课题设计交通流量问题论文院系:理学院班级:信息1103姓名:陈小宇学号:指导老师:党林立《数学建模与数学实验》课程设计任务书一.摘要本篇用微观分析着眼于交通流运行中每一辆机动车的运动情况。
每一辆车被当作一个质点来处理。
这种处理方法的前提是已知每一辆车的位置,速度,和加速度。
本篇只讨论最简单的模型,即理想化为在一条平直公路上行驶的车辆,车辆之间不允许超车。
在t〈=0的时候,所有车辆均以匀速行驶。
在t=0+时,领头的车开始偏离u0一段时间,这样就对原来稳定的状态产生了波动,使他们调节自身的速度来协调这种波动。
主要有以下两个方面:1. 1.对于连着的两辆车,在哪种情况下,前一辆车的偏离行为会导致后一辆车的过度补偿行为即后一辆车的调整是否超过了所需要的调整范围,从而产生了一种类似于钟摆式简谐运动的振动。
若这种振动的幅度不随时间衰减,就形成了车流问题的“局部稳定”。
2.对于一列车辆,在哪种条件下,领头车辆引起的小小扰动会随着他的继续行驶而增 大,从而引起这一列中车辆之间的碰撞这是车流问题中的渐进稳定性问题。
为了解决这两个问题,本篇将具体讨论解决时间滞后的不同方程。
二.背景现代社会的日常活动在极大程度上依赖于安全高效的交通流。
在过去的一些建模的例子中都有不同程度的讨论这个问题。
它能帮助降低交通阻塞和交通事故,从而实现更好的路况,设计出更好的交通灯体以及行之有效的交通法规。
本篇从简单的模型出发,分层逐步细化模型的讨论及求解,以期能对交通流问题作另一种特别的阐述。
三.建模及求解1. 瞬时速度的控制取公路为x 轴,车辆运动的方向为x 正向。
)(t x n 为T 时刻第n 辆车的位置。
)()(t x t v n n 且0)(u t v n )0( t 为方便起见,取一个参考系,以0u 的速度为参考速度0)()(u t v t u n n 这样0)( t u n )0( t 即为初始条件做第一个近似处理,假设第N 辆车的司机根据它与前一辆车的相对速度来调整自身车速, 则有212u u u , 323u u u ,…11 n n n u u u ,n=1,2,3,…N 作为一个简单的模型,假设所有司机反应灵敏程度相同,即 一致,是一个常数,据有关实验,(GENERALMOTORS 所做的实验), 介于14.0~3.0 s 之间,取137.0 s一旦领头的车偏离0u 则由初始条件及通式可依次算出),(t u n (n=1,2,3,…N)对于整个车流问题,我们关心的是它的稳定性,即领头车辆的扰动会不会引起放大,因此我们假设,sin )(1t t u 并展开成傅力叶级数,有其中u 为振幅,2 为初相,且22/122cos )1(u 由于 t 时,u u 2由有)2sin()2sin()(2223 t e t u t u t同理, t 23)(u t u ;以此类推,1, k k u u t 由于,1 u 当k 与t 很大,)(t u k 将相当小因此有结论:任何由领头车辆产生的扰动,都不回随着车辆的运行而被放大,这个结论从显示意义上来看显然是错误的。
2.考虑滞后时间的速度控制以上建模失败的原因是:1司机的反应时间被忽略了,因为司机不可能在前车改变速度的同时就观察到相对速度的变化;(2)观察到变化的同时作出反应(踩油门或刹车); (3)作出反应的同时完成所需的动作。
因此,修改(1,2)式)()()(11T t u T t u t u n n n (t>1)n=1,2,…….N -1 根据实验数据,滞后时间T 在s 2.2~0.1范围内, 另有辅助条件,即初始条件,0)( t u n T n t )1( n=1,2,3,…N -1在大多数情况下,领头车辆的运动状态为已知量 定义kTk sk xk st k dt t u e dt t u e s U )()()(1011由于0)(1 t u k 对于kT t 有xkTk k st kT st k k st s sU dt t u e s et u dt t u e 01111)()(|)()( 以及)1()()(Tk k st k st dt T t u e dt T t u eTk k sT k T t s s U e d u e )2()()()(由于,0)(1 t u e k sk()的不定积分存在,在()两边同乘以st e ,并在(0, )上积分,有 )()()(11s U e s U e s sU n sTn sT n 或sT n n ses U s U)()(1 在t t u sin )(1 的情况下,可得022sins tdt e st且由()()得2212)()(s se se s U s u sT sT此处)(s U k 是)(t u k 的拉普拉斯变换,不能从手册中找到,并且得到的结果预计也回很复杂,而很难得出有用的结论,因此,考虑用初等的方法解决。
3.对滞后时间的近似处理 对()()进行泰勒展开...)()(!21)()()()(2t u T t u T t u T t u k k k k 若T 不大,可以保留前两项得出近似解)()()1(11t u T t u u u T n n n n对于t u sin 1 这个一阶普通微分方程,在n=1时的通解为 t B t A e C t u T t cos sin )(22)1/(22)12()1()1(222222222 T T TT A对于n>2可类似求得,结构与()相似 当1. T 时,可由上看出车辆运动情况的振幅将不随 的增加而放大,12 T T 时,也是一样,得出结论:()式的第一个近似可以知,若1 T ,车辆的运动状况将局部渐近稳定。
若保留更多项则可以得到更精确的结果,保留T 中的四次项,由()式有)()()()1(22211112t u T t u T t u u u T u T n n n n n n如前所述,影响稳定性的一个因素来自()式的补充解。
用表达补充解的特征指数是()的解:(221T )2 +(1- )T =0的两个根为:1 (2 )=222)(2)1()1(TT T T () 显然1 T 将导致失稳。
但12 T 是否成立将影响到1 T 。
对于112 T ,车辆运动的形式将逐步衰减(类似于阻尼振动)。
对于n=1及u 1=sin t 1212)( e C t u t 222 e C t+t A sin + cos 2B t ()且222222)1()211(T T ()从()可得,若21 T ,领头车辆的扰动将不会被放大对应于式()的结果,使T 的取值范围大幅度减小有结论:由()近似的模型控制的车流,在T <12 时局部渐进稳定。
关于T 的准则可能会因为更高次项的影响而改变。
因此我们不寻求一个对高次项的影响的评价,而是由初始模型()()直接分析。
4.局部及渐进稳定性对于T=0,寻求一个辅助解)]()([)(212T t u T t u t u ()并以指数形式出现 u c 2(t)=Ve t (V, 是常数) () 当且仅当所有的补充解都以()形式出现且0 时,()是局部稳定的对于0)(1 T t u ,()要求 是方程()的一个解 (z e T z ) (T z ) 作图得<T <1/e,有两个实根 2.T =1/e ,有一个实根 3.T >1/e,无实根若()的一些实根是复数,则由领头车辆所引起的扰动仍将被衰减,前提是Re( )>0下面讨论这将对T 产生什么限制 使z=x+iy 由()得x=(T )e x cosy,y=(T )e x siny () 若y=0,就还原为(),即实数解 若0 y 等价yctgy x ,T yy x ln sin ln的第一个方程表现为附图的抛物线(虚线围成的),第二个方程则用实线表示,在 y 的范围内,虚线和实线在x=0处及2T ,所以有实部为负数的根,从图中也可明显看出,对于 y ,()的所有根的实部都为负数,也就是说,在实线和虚线中所有交点都在x=0以下,相对应的T 的值大于2 ,因此,对于()所有指数解,必须使2T ,对于e T 1 ,在 y 的范围内虚线和实线并不想交,但是在x>0且 y 时相交,因此()在 y 的范围内无虚根综合,对实数和复数范围内的分析有结论: 系统()在368.01 eT ,的条件下局部稳定,(以上分析等价于sT se 中零点的位置)回到()的特解,再考虑t t u sin )(1 ,t>0的情况,期待一个特解,以t C B t u p cos sin )(2 形式出现,由降系数的方法得到: C=22sin 1cos 1DT D其中T D sin 2122因此)sin(1)(22 t Dt u p (t>T)类似得可得,...4,3),( n t u n 的相应的特解形式为)sin(1n n t D因此,除非12 D 或TT T sin 21 ,领头车辆的钟摆式的扰动将随着它的行驶而放大,若12 D 对于所有 ()系统是渐近稳定的,由于2/0 x ,1sin limxx有结论:若2/10 t 系统将渐近稳定。
四.模型评价对于137.0 s 和T=可以得到555.0 T 比稍大考虑到()是一个相对粗糙的近似,所得到的结果也并不是绝对的,即使稍微超出边界条件也是允许的,总之,以上的分析讨论的确证实:在高速公路上发生车祸的可能性要比我们大多数人想象的要大,因此,高速公路上常设置有明显醒目的柱子,以提示人们注意安全。