计算机仿真技术对双螺杆动态模拟的研究
一种新型锥形双螺杆齿形的优化设计及动态仿真模拟

一种新型锥形双螺杆齿形的优化设计及动态仿真模拟GUO Yang【摘要】:研究锥形双螺杆的齿型啮合精度,进而提高塑料连接管道的装配精度,提高其生产效率.通过对其齿形的优化设计,选取一种简单且加工精度较高的锥形双螺杆模型,运用三维UG软件对其螺杆转子进行建模,利用C++Builder编程软件进行转子的二维动态模拟啮合运动,分析其工作原理,从而为加工高精度锥形双螺杆提供理论依据.【期刊名称】《辽宁师专学报(自然科学版)》【年(卷),期】2018(020)004【总页数】3页(P87-89)【关键词】锥形双螺杆;齿形;动态模拟【作者】GUO Yang【作者单位】【正文语种】中文【中图分类】TQ315锥形双螺杆挤出机已经成为UPVC干混粉料挤出成型加工的主要机型,大量应用在板材、异性材、管材等制品[1].此类型挤出机的核心部件是一对相互啮合运转的锥形双螺杆,其啮合时从同一对齿轮啮合进入和材料输出时所形成的啮合间隙是否相等直接影响产品的质量与生产效率.对于啮合间隙的设计需要保证转子运动不发生干涉,同时又要避免由于间隙过小发生咬死现象.通过分析螺杆法向截面齿廓,其齿侧可近似看成由多个折点链接所组成,用三折直线代替渐开线,寻找优化约束函数与约束条件,并用计算机程序进行优化计算,最终确定法向截面齿廓侧齿的折点个数,并通过建立理论动态模型,模拟锥双螺杆的法线二维转动,从而可直观测出其双螺杆转子间隙运动情况,为加工高精度的锥双螺杆转子提供必要的理论依据.1 优化设计问题提出本优化设计基于锥双螺杆在符合精度设计要求的前提下,其母线易加工且逼近螺旋面精度,符合设计要求,加工效率高,进而使啮合和齿型更加合理,提高产品产量和质量.(1)理论最大挤出量.理论最大挤出量等于无螺杆头部压力下,单位时间内螺杆转数、一个C型小室(啮合型双螺杆挤出机)体积与螺纹头数三者的乘积[2],即:其中m为螺纹头数,n为螺杆转数,V为一个C形小室的体积.(2)双螺杆实际挤出量.双螺杆实际挤出量为Q实,则有其中η为输送系数,取0.35~0.5;q为(0.5~0.65)Qmax所以目标函数为(3)螺杆C型小室体积V的确定.螺杆啮合所形成的C形腔室的体积可以看成从任意某一长度的空料棒材的体积减去相同长度的锥双螺杆的体积.经推导如下:其中:R是螺杆的外径(与机筒内半径相等),H为一对锥双螺杆组成的C形腔室的深度,B为外径沿轴线方向的螺棱宽.2 齿形约束条件(1)α、β和δ的约束.图1为螺杆UG三维建模图,图2为图1轴向横截面法向图.如图1所示为折线齿形代替渐开线齿形,图中所示折点的位置确定为本文研究的核心所在.折线与垂直方向的夹角分别为α,β和δ,其角度的大小决定了齿形中折点的位置,所以首先应确定α、β和δ的范围.满足双螺杆能够正常啮合,三个角小于180°时的组合情况下求解螺杆的折点的方法称为角度组合法.具体分析满足一定范围的角度组合的转子所形成的折点,并判定最大值是否在控制公差范围之内.而C形小室的体积值V的表达式中含有α和β,所以对于C形小室的最大体积问题就转化为求解α和β值的问题.通过上述体积V所包含的α,β和δ,再加上角度范围的限制,我们可以组成约束函数的一部分.(2)齿形折点满足的条件.(ⅰ)优化后,折点所形成的齿廓在螺杆啮合过程中避免干涉的产生;(ⅱ)折点位置的改变会引起C形小室体积的变化,而折点的位置应满足使挤出量V最大.由α,β和δ的约束条件及齿形折点满足的条件最终组成约束函数.按本文提出的方案进行优化分析时,由于优化目标中等式约束与不等式非线性约束共存,故采用序列二次规划算法(Sequential Quadratic Programming,简称SQP),即将原问题转化为一系列二次规划问题并利用C++Builder软件进行求解.例如,我们取右旋螺杆上的参数为下齿高25mm,螺杆外径为160mm,螺杆内径为110mm,经查表得知径向间隙为0.5mm,轴向间隙为1.8mm,齿顶宽为26.5mm,头数为2头,导程为69mm,螺棱角为4.2°.其优化结果为α=10°,β=21°,X=14,Y=12(其中X,Y分别表示折点在平面坐标中对应的值).3 锥双螺杆三维建模本文研究的问题为折点的螺杆轴向齿廓,即可近似看成由两种参数不同的阿基米德线所组成的端截面,通过UG进行仿真模拟建模,其端截面如图3所示,啮合立体图如图4所示.4 转子二维动态模拟演示锥双螺杆各端截面齿廓逐渐啮合,组成了螺旋转子的啮合运动.每个端面的啮合过程近似看成相同.利用计算机C++Builder编程技术[3]将转子的端面齿廓坐标,通过分散点连接,从而可以连续地显示轴截面齿廓的瞬时位置,进而实现锥双螺杆转子任意轴截面内齿廓啮合的动态模拟.通过编程软件模拟转子二维运动,可观测出与上述UG立体建模所形成的端截面完全吻合.我们可以从仿真软件中,直观地考察和分析两转子齿廓的啮合情况.通过上述的方程应用C++Builder求取N个点(N的值越大,点数越多),然后我们输入螺杆的外径和根径,通过外径和根径的取值范围来限定阿基米德螺旋线的范围,从而把在满足大于根径且小于外径的点分别逐一连接,这样就形成了端截面.此方法的好处在于使演示结果更加直观形象,其界面演示如图5所示[4].5 结语本文分析了目前广泛使用的一类锥双螺杆的结构特征,并从提高生产PVC效率和是否产生干涉为问题出发点,确定了由齿形角度决定的优化参数及其公式推导与优化算法,推导出求解的数学模型,并对螺杆的啮合进行三维UG建模,编制了动态仿真运动程序模拟齿型横截面啮合运动,从而研究其动态模拟运动提供充分的理论依据.【相关文献】[1]张友根.我国注塑机的特点及发展方向[J].上海塑料,2004,(3):4-8.[2]尤志斌.同向双螺杆熔体输送段螺杆设计参数的研究[D].北京:北京化工大学,2008. [3]汪顺亮,朱复华.挤出过程计算机模拟[M].北京:机械工业出版社,2005.[4]洪国胜,张建原,洪月里.C++Builder程序轻设计轻松上手[M].北京:清华大学出版社,2001.。
非等温条件下啮合同向双螺杆挤出过程数值模拟分析
非等温条件下啮合同向双螺杆挤出过程数值模拟分析赵玉莲;李鑫;安琪;黄志刚【摘要】采用SolidWorks建立啮合同向双螺杆三维物理模型,通过改变螺杆挤出机加工聚乳酸时的转速,在非等温的模拟条件下,通过polyflow软件对其进行相应的模拟分析,对比不同转速对聚乳酸加工时产生的影响.结果表明:在非等温条件下,温度在挤出方向上线性增加,并且温度在Z轴截面上沿径向向外逐渐增大.通过对比不同转速下的流场分析,发现随着转速的增大,螺槽内出现较大的温差,当转速达到240 r/min时,聚合物出现部分降解,对生产加工产生影响;对剪切速率场和黏度场的对比分析也进一步验证了两者的相关性.【期刊名称】《食品与机械》【年(卷),期】2019(035)004【总页数】4页(P76-79)【关键词】同向双螺杆挤出机;非等温;转速;剪切速率;黏度;数值分析【作者】赵玉莲;李鑫;安琪;黄志刚【作者单位】北京工商大学材料与机械工程学院,北京 100048;塑料卫生与安全质量评价技术北京市重点实验室,北京 100048;北京工商大学材料与机械工程学院,北京 100048;塑料卫生与安全质量评价技术北京市重点实验室,北京 100048;北京工商大学材料与机械工程学院,北京 100048;塑料卫生与安全质量评价技术北京市重点实验室,北京 100048;北京工商大学材料与机械工程学院,北京 100048;塑料卫生与安全质量评价技术北京市重点实验室,北京 100048【正文语种】中文聚乳酸(PLA)是一种以乳酸为原料且具有良好的生物降解性和生物相容性的环境友好型高分子材料,近年来的研究和应用[1]越来越广泛。
啮合同向双螺杆挤出机作为PLA加工设备之一,被广泛应用于PLA的加工过程中[2]。
而螺杆挤出机的加工工艺[3]参数的变化也影响着聚乳酸产品的质量,基于此对流道的分析就尤为重要,然而由于螺纹流道中真实流动情况复杂,因此多普遍采用数值法[4-6]进行分析求解。
基于计算流体力学的双螺杆泵的数值模拟外文翻译论文

基于计算流体力学的双螺杆泵的数值模拟由于其在单相或多相操作可靠性和优良的性能,双螺杆泵是广泛应用于石油化工、航运、能源和食品工业正排量机械。
图1中给出了一个双螺杆泵的典型布置图,显示转子同步定时齿轮和封闭的外壳。
越来越高的要求对于高性能螺杆泵设计改进需要越来越高的要求。
最近的在制造技术的发展,可以准确地生产新颖的设计。
但在螺杆泵设计方面的改进,充分了解泵内的过程是必需的。
到目前为止,大多数模型的性能分析的基础是热力室建模。
双螺杆泵的结构和成分许多以前的研究报告了双螺杆泵的工作过程建模和实验研究工作的报告。
文学资源的数量是大的,因此,只有最相关的将在下面列出李[ 1 ]介绍了各种螺杆泵的结构、齿形的产生及性能计算。
冯c.et.al [ 2 ]建立模型后的流量和压力的产生多相双螺杆泵内和模拟的热力学性能和不同气体体积分数的泵所输送的行为,唐张[ 3 ]模拟基于CFD的静态网格流场动力学提出了泄漏模型的双螺杆泵,他们还优化了齿廓。
泾渭[ 4 ]讨论了双螺杆齿形设计基于CFD的模拟机和静态网格流场。
D. Mewes [ 5 ]提出了根据质量和能量的多相泵性能计算模型在泵室的保护,并通过实验验证。
阿沛帕蒂尔[ 6 ]和埃文陈[ 7 ]研究了不同工作条件下的稳态和暂态特性。
他们讨论了密封液粘度和气体空隙率的影响关于双螺杆泵性能的研究。
K.雷比格尔[ 8 ]提出了一个模型螺杆泵,并对泵性能进行了数值计算和实验分析在非常高的气体体积分数(99% - 90%),他还进行了实验,以可视化泄漏流动的径向间隙[ 9 ]。
文献资源的引用提供了一个很好的理解的工作过程中,但指出,改善是可能的,特别是多相泵的新应用。
然而,大多数的电流的方法是基于热力学室忽视动能的数学模型,简化了主、漏流分析(10)(11).一些人指的是稳态计算流体动力学假设移动流域静态网格,近似压力梯度和泄漏速度场可以获采用静态网格得,然而,这样的结果不考虑的速度场的主要流动和忽视的工作过程中的螺杆泵的瞬态特性.由于采用静态网格的计算流体力学模拟的限制,一些重要的参数不能得到,如质量流量,转子转矩和压力波动, 所以,一个多相泵压力场在静态网格结果明显会有所不同,因此功率计算不准确;此外,压力流量损失无法计算.因此,如功率损耗,间隙变化的影响,包括空化和多相流的任何动态行为的现象不能使用这样的静态网格分析.螺杆泵工作域在动转子与固定套管之间。
基于ansys workbench的双螺杆膨胀机转子静力学分析
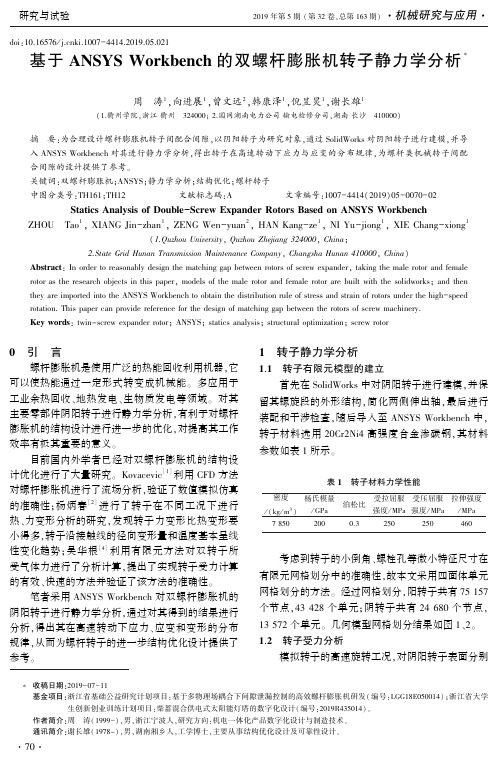
doi:10.16576/j.cnki.1007-4414.2019.05.021基于ANSYSWorkbench的双螺杆膨胀机转子静力学分析∗周㊀涛1ꎬ向进展1ꎬ曾文远2ꎬ韩康泽1ꎬ倪昱炅1ꎬ谢长雄1(1.衢州学院ꎬ浙江衢州㊀324000ꎻ2.国网湖南电力公司输电检修分司ꎬ湖南长沙㊀410000)摘㊀要:为合理设计螺杆膨胀机转子间配合间隙ꎬ以阴阳转子为研究对象ꎬ通过SolidWorks对阴阳转子进行建模ꎬ并导入ANSYSWorkbench对其进行静力学分析ꎬ得出转子在高速转动下应力与应变的分布规律ꎬ为螺杆类机械转子间配合间隙的设计提供了参考ꎮ关键词:双螺杆膨胀机ꎻANSYSꎻ静力学分析ꎻ结构优化ꎻ螺杆转子中图分类号:TH161ꎻTH12㊀㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀㊀文章编号:1007-4414(2019)05-0070-02StaticsAnalysisofDouble-ScrewExpanderRotorsBasedonANSYSWorkbenchZHOU㊀Tao1ꎬXIANGJin-zhan1ꎬZENGWen-yuan2ꎬHANKang-ze1ꎬNIYu-jiong1ꎬXIEChang-xiong1(1.QuzhouUniversityꎬQuzhouZhejiang324000ꎬChinaꎻ2.StateGridHunanTransmissionMaintenanceCompanyꎬChangshaHunan410000ꎬChina)Abstract:InordertoreasonablydesignthematchinggapbetweenrotorsofscrewexpanderꎬtakingthemalerotorandfemalerotorastheresearchobjectsinthispaperꎬmodelsofthemalerotorandfemalerotorarebuiltwiththesolidworksꎻandthentheyareimportedintotheANSYSWorkbenchtoobtainthedistributionruleofstressandstrainofrotorsunderthehigh-speedrotation.Thispapercanprovidereferenceforthedesignofmatchinggapbetweentherotorsofscrewmachinery.Keywords:twin-screwexpanderrotorꎻANSYSꎻstaticsanalysisꎻstructuraloptimizationꎻscrewrotor0㊀引㊀言螺杆膨胀机是使用广泛的热能回收利用机器ꎬ它可以使热能通过一定形式转变成机械能ꎮ多应用于工业余热回收㊁地热发电㊁生物质发电等领域ꎮ对其主要零部件阴阳转子进行静力学分析ꎬ有利于对螺杆膨胀机的结构设计进行进一步的优化ꎬ对提高其工作效率有极其重要的意义ꎮ目前国内外学者已经对双螺杆膨胀机的结构设计优化进行了大量研究ꎮKovacevic[1]利用CFD方法对螺杆膨胀机进行了流场分析ꎬ验证了数值模拟仿真的准确性ꎻ杨炳春[2]进行了转子在不同工况下进行热㊁力变形分析的研究ꎬ发现转子力变形比热变形要小得多ꎬ转子沿接触线的径向变形量和温度基本呈线性变化趋势ꎻ吴华根[4]利用有限元方法对双转子所受气体力进行了分析计算ꎬ提出了实现转子受力计算的有效㊁快速的方法并验证了该方法的准确性ꎮ笔者采用ANSYSWorkbench对双螺杆膨胀机的阴阳转子进行静力学分析ꎬ通过对其得到的结果进行分析ꎬ得出其在高速转动下应力㊁应变和变形的分布规律ꎬ从而为螺杆转子的进一步结构优化设计提供了参考ꎮ1㊀转子静力学分析1.1㊀转子有限元模型的建立首先在SolidWorks中对阴阳转子进行建模ꎬ并保留其螺旋段的外形结构ꎬ简化两侧伸出轴ꎬ最后进行装配和干涉检查ꎬ随后导入至ANSYSWorkbench中ꎬ转子材料选用20Cr2Ni4高强度合金渗碳钢ꎬ其材料参数如表1所示ꎮ表1㊀转子材料力学性能密度/(kg/m3)杨氏模量/GPa泊松比受拉屈服强度/MPa受压屈服强度/MPa拉伸强度/MPa78502000.3250250460考虑到转子的小倒角㊁螺栓孔等微小特征尺寸在有限元网格划分中的准确性ꎬ故本文采用四面体单元网格划分的方法ꎮ经过网格划分ꎬ阳转子共有75157个节点ꎬ43428个单元ꎻ阴转子共有24680个节点ꎬ13572个单元ꎮ几何模型网格划分结果如图1㊁2ꎮ1.2㊀转子受力分析模拟转子的高速旋转工况ꎬ对阴阳转子表面分别07 研究与试验㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年第5期(第32卷ꎬ总第163期) 机械研究与应用∗收稿日期:2019-07-11基金项目:浙江省基础公益研究计划项目:基于多物理场耦合下间隙泄漏控制的高效螺杆膨胀机研发(编号:LGG18E050014)ꎻ浙江省大学生创新创业训练计划项目:柴蓄混合供电式太阳能灯塔的数字化设计(编号:2019R435014)ꎮ作者简介:周㊀涛(1999-)ꎬ男ꎬ浙江宁波人ꎬ研究方向:机电一体化产品数字化设计与制造技术ꎮ通讯简介:谢长雄(1978-)ꎬ男ꎬ湖南湘乡人ꎬ工学博士ꎬ主要从事结构优化设计及可靠性设计ꎮ施加不同的角速度载荷ꎻ对阴阳转子的伸出轴段施加位移约束ꎬ并设置X㊁Y㊁Z分量为0ꎬ即如图3㊁图4所示ꎮ已知阳转子的转速为3000r/minꎬ阴转子的转速为2000r/minꎮ图1㊀阳转子网格划分图㊀㊀㊀图2㊀阴转子网格划分图图3㊀阳转子载荷及约束㊀㊀㊀图4㊀阴转子载荷及约束㊀㊀在所有约束条件设置完毕后ꎬ对转子模型进行等效应力㊁等效应变和总变形分析ꎬ如图5㊁图6所示ꎮ图5㊀阳转子应力应变图图6㊀阴转子应力应变图2㊀结果分析如上所述中应力云图中所示ꎬ其中应力较大的区域位于阳转子表面区域ꎬ其应力值为3.76~14.92MPaꎻ对于阴转子ꎬ它的应力主要集中在转子表面ꎬ并在表面与转轴的接合处存在应力集中点ꎬ其应力为3.33~5.53MPaꎬ远小于其最大屈服极限ꎬ不会发生危险ꎮ阴阳转子的应变分布规律与应力分布相似ꎬ最大应变值为阳转子在表面与转轴的接合处ꎬ达到了0.13μmꎻ对于阴转子ꎬ它的整体应变量都较低ꎬ转子表面大部分应变量为1.70ˑ10-7~1.96ˑ10-5mmꎬ在转轴与转子表面螺旋内侧则相对较高ꎬ最高达到了3.9047ˑ10-5mmꎬ均符合安全要求ꎮ转子变形云图如图5㊁图6所示ꎬ对比来看ꎬ阳转子的变形量大于阴转子ꎬ并且双转子的最大变形量均在表面与转轴的接合处ꎮ阳转子的最大变形量位于转子表面并靠近于转轴接合处的地方ꎬ其变形量为5.14μmꎬ阴转子的最大变形量值为1.48μmꎮ经过分析ꎬ其主要原因可能是转子主轴与旋转轴接合处的刚度不足ꎬ从而导致了扭转变形的发生ꎬ在实际工作中可能会造成一定的安全隐患ꎬ因此提高转子刚度或优化转子的转轴结构是其主要的解决方法ꎮ3㊀结㊀论通过对双螺杆膨胀机阴阳转子进行基于ANSYSWorkbench的静力学分析得到:双转子的最大应力均远小于它的最大屈服极限ꎻ阴阳转子的应变分布规律与应力分布相似ꎬ且均符合安全要求ꎻ双转子的最大变形量均在表面与转轴的接合处ꎬ且阳转子形变量更大ꎬ原因是阳转子主轴与旋转轴结合处的刚度不足ꎬ从而导致了扭转变形的发生ꎮ参考文献:[1]㊀AhmedKovacevicꎬNikolaStosicꎬLanKSmith.Numericalsimulationoffluidflowandsolidstructureinscrewcompressors[R].ASMEIn ̄ternationalMechanicalEngineeringCongressꎬNewOrleansꎬ17-22Novꎬ2002.[2]㊀杨炳春ꎬ李建风ꎬ邢子文ꎬ等.无油螺杆空气压缩机转子变形分析[J].压缩机技术ꎬ2005ꎬ189(1):8-11.[3]㊀李红华.双螺杆挤出机传动箱体的有限元模态分析及结构优化设计[D].南京:南京农业大学ꎬ2012.[4]㊀吴华根ꎬ罗江锋ꎬ关丽莹ꎬ等.螺杆空压机转子受力有限元计算研究[J].流体机械ꎬ2014ꎬ42(2):43-46.[5]㊀曹㊀峰ꎬ邢子文ꎬ束鹏程.双螺杆转子的受力分析[J].应用力学学报ꎬ2002ꎬ19(1):90-93.[6]㊀刘广彬ꎬ赵远扬ꎬ杨启超ꎬ等.螺杆膨胀机转子型线特性研究[J].制冷与空调ꎬ2014(6):25-27.[7]㊀魏㊀静ꎬ孙旭建ꎬ孙㊀伟.双螺杆转子结构特性流固耦合数值模拟[J].中国机械工程ꎬ2012ꎬ23(18):2228-2233.[8]㊀吴慧媛ꎬ何雪明ꎬ戴㊀进.基于CFD的双螺杆压缩机的三维动态仿真研究分析[J].中国机械工程ꎬ2013ꎬ24(24):3366-3370.17 机械研究与应用 2019年第5期(第32卷ꎬ总第163期)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀研究与试验。
双螺杆真空泵转子型线设计与仿真研究
双螺杆真空泵转子型线设计与仿真研究一、概要本文主要研究了双螺杆真空泵转子型线的设计与仿真。
双螺杆真空泵是一种高效的真空设备,其转子型线对于泵的性能有着重要影响。
本文首先分析了双螺杆真空泵的工作原理和结构特点,然后提出了几种典型的转子型线设计,并对它们进行了仿真分析。
通过对仿真结果的分析比较,得出了各自型线的优缺点,为进一步优化设计提供了依据。
分析双螺杆真空泵的工作原理和结构特点,为转子型线设计提供理论支持。
随着科学技术的发展,真空技术在各领域的应用越来越广泛。
双螺杆真空泵作为一种高效、清洁的真空设备,在许多领域得到了广泛应用。
传统的双螺杆真空泵在设计过程中存在一定的局限性,如漏气量大、效率低等问题。
对双螺杆真空泵转子型线进行优化设计具有重要意义。
许多研究者对双螺杆真空泵转子型线进行了深入研究。
通过改进转子型线设计,可以有效减小泄漏量、提高泵的运行效率。
本文将对双螺杆真空泵转子型线设计进行研究,以期达到更好的设计效果。
1.1 研究背景与意义随着科学技术的不断发展,各个行业对于高效、优质、高性能流体设备的需求越来越高,这就对泵类设备的性能提出了更高的要求。
双螺杆真空泵作为一种新型的流体机械,具有结构简单、操作维护方便、运行效率高、适用范围广等优点,在许多领域如科研、化工、制药、食品加工等方面得到了广泛的应用。
在双螺杆真空泵的研究与应用过程中,转子型线的设计与优化一直是人们关注的焦点。
合理的转子型线可以有效提高双螺杆真空泵的性能,延长使用寿命,开展双螺杆真空泵转子型线设计与仿真研究具有重要的理论意义和实际应用价值。
1.2 国内外研究现状及发展趋势随着科学技术不断发展,双螺杆真空泵转子型线设计在国内外都受到了广泛的关注与研究。
许多知名企业和研究机构对双螺杆真空泵转子型线设计进行了深入的研究,取得了一系列重要的理论成果和应用实践经验。
这些研究成果不仅推动了双螺杆真空泵技术的发展,也为其他领域的研究提供了有益的借鉴。
基于MATLAB的双摇杆机构运动分析与仿真模板
本科生毕业设计基于MATLAB的双摇杆机构运动分析与仿真Based on the MATLAB double rocker organization movement analysis and simulation基于MATLAB/SIMULINK的双摇杆机构运动学分析与仿真邹凯旋云南农业大学工程技术学院,昆明黑龙潭650201摘要平面连杆机构的应用十分广泛,它的分析及设计一直是机构学研究的一个重要课题。
MATLAB的Simulink是一个对动态系统建模和仿真分析的软件包,为信号与系统仿真实验提供了很好的平台。
借助其强大的模拟仿真分析功能可以方便的实现机构性能分析和动态仿真,降低分析的难度,有效提高设计工作效率、产品开发质量、降低开发成本。
本设计课题以MATLAB的simulink\simMechanics 动态模拟仿真工具为平台,对双摇杆机构进行运动分析。
结果表明该仿真方法能方便、准确的得到机构的运动、动力数据,能为机构的选择、优化设计提供参考依据。
应用此工具可很好地对机械系统的各种运动进行分析,构造出平面连杆机构的数学模型。
通过对此数学模型分析,分离出可独立求解的机构模型,并用相应的机构分析方法对它进行求解,建立了平面连杆机构运动学分析专家系统。
系统可完成部分平面连杆机构的运动学分析及动画仿真,从而为机械系统的建模仿真提供一个强大而方便的工具。
关键词:连杆机构;动态仿真;SimMechanics;数学模型Based on the MATLAB double rocker organizationmovement analysis and simulationZou kaixuanFaculty of Engineering and Technology Yunan Agricultural University,HeilongtanKunming 650201ABSTRACTPlanar linkage mechanism used widely, its analysis and design of the study of institutions has been an important subject. MATLAB Simulink is a dynamic system modeling and simulation software package, for signal and system simulation results provide a good platform. With its powerful simulation analysis function is realized the performance analysis and the dynamic simulation institutions, reduce the difficulties of analysis, effectively improve the design work efficiency and product development quality, reduce development costs. This design task to MATLAB simulink \ simMechanics dynamic simulation tools as the platform, on the double rocker organization motion analysis. The results show that the simulation method can conveniently, accurately to get the kinematic and dynamic data organization, for the choice of institutions, optimum design to provide the reference. This tool can application is mechanical system analysis of all kinds of sports, constructed the mathematical model of the planar linkage mechanism. Through mathematical model to analysis, separating out can be independent of solving mechanism model, and the corresponding institutions analysis method to solve it, a planar linkage mechanism kinematic analysis of the expert system. System can finish part of planar linkage mechanism kinematic analysis and animated simulation, thus for mechanical system modeling simulation provide a strong and convenient tool.Key words: linkage;Dynamic Simulation;SimMechanics;mathematical model目录摘要 (Ⅰ)ABSTRACT (Ⅱ)目录 (Ⅳ)图目录 (Ⅴ)公式目录 (Ⅴ)前言 (1)一、概述 (1)1. 双摇杆机构的相关知识 (1)2. 双摇杆机构的运动学分析传统方法 (1)3. 用软件进行机构运动学分析的现状和趋势 (2)4. 使用MATLAB/SIMULINK的优势 (2)5. MATLAB/SIMLINK的特点 (3)二、设计任务分析 (3)1. 设计内容和任务 (3)2. 实现技术路线 (4)3. 关键问题和难点分析 (5)三、程序设计与实现 (5)1. 系统组成 (6)2. 程序设计与实现 (6)3. 基于运动学的模型建立 (7)4. 参数化设计 (9)5. 仿真结果 (14)四、设计结果分析 (15)1. 软件的使用方法 (15)2. 存在的缺点和今后改进的方向 (16)五、设计心得 (16)参考文献 (18)致谢 (19)图目录图1-1双摇杆机构 (1)图1-2鹤式起重机 (1)图2-1实现的流程图 (5)图2-2双摇杆机构运动简图 (5)图3-1 Simulink界面 (6)图3-2new model (7)图3-3SimMechanics (7)图3-4 bodies (7)图3-5Joints (8)图3-6Sensors Actuators (8)图3-7双摇杆机构仿真模型图 (9)图3-8Ground模块 (9)图3-9evolute模块 (10)图3-10bodyAB模块 (10)图3-11bodyBC模块 (11)图3-12bodyCD模块 (11)图3-13Joint Seneor模块 (12)图3-14Joint Initial Condition模块 (12)图3-15Scope模块 (12)图3-16机械环境模块 (13)图3-17命令窗口参数输入 (14)图3-18仿真结果的动画显示 (14)图3-19位置图、速度图、加速度图 (15)一、概述1.双摇杆机构的相关知识在双摇杆机构中,两摇杆均可作主动件。
双螺杆泵型线分析及仿真研究
双螺杆泵型线分析及仿真研究双螺杆泵是一种用于输送高粘度流体的泵,具有稳定的性能和高效的输送能力。
在双螺杆泵的工作过程中,螺杆的型线对其性能有着重要影响。
因此,在设计和研究双螺杆泵时,对其型线的分析和仿真显得尤为重要。
首先,双螺杆泵的型线分析可以通过几何学方法进行。
通过对螺杆的几何特征进行建模,并考虑螺杆之间的间隙,可以得到螺杆的型线。
双螺杆泵常采用等螺距、等径向压力分布、等螺旋线的型线,这可以通过几何方法计算得到。
型线的形状对泵的性能有重要影响,因此,在型线的选择和分析中要考虑到流体的特性和输送要求。
其次,双螺杆泵的型线分析还可以通过计算流体动力学方法进行。
计算流体动力学方法可以模拟流体在螺杆间隙中的流动过程,并分析流动的压力、速度、流量等参数。
基于计算流体动力学的仿真模拟可以帮助研究人员更全面地了解双螺杆泵的性能,并进行参数优化和改进设计。
在双螺杆泵型线仿真研究中,可以通过建立相应的数学模型进行计算。
常见的数学模型包括基于黏性流体的雷诺平均Navier-Stokes方程模型和基于非黏性流体的复杂位移型模型等。
通过数值求解这些数学模型,可以获得双螺杆泵在各种工况下的性能参数,并进行性能分析和优化设计。
此外,还可以利用计算机辅助设计和仿真软件进行双螺杆泵型线的仿真研究。
借助现代计算机软件的强大计算和可视化功能,可以更便捷地进行双螺杆泵的型线仿真研究。
通过改变泵的参数和型线,可以直观地观察到不同参数对泵性能的影响,从而为优化设计提供依据。
总之,双螺杆泵型线的分析和仿真研究对于设计和改进双螺杆泵具有重要意义。
在双螺杆泵的设计和生产过程中,通过对型线的分析和仿真研究,可以优化双螺杆泵的性能,提高其输送能力和工作效率,满足不同应用领域的需求。
双螺杆挤出机的传动系统研究的开题报告
双螺杆挤出机的传动系统研究的开题报告一、选题的背景和意义双螺杆挤出机作为一种重要的高分子材料加工设备,其应用范围非常广泛,包括塑料、橡胶、化纤、食品、医药等领域,成为现代化生产的重要组成部分。
在双螺杆挤出机中,传动系统对于整个设备的性能和工作效率具有重要作用。
为了提高传动系统的精度和稳定性,保证设备正常运行,对其进行深入的研究和优化非常必要。
二、研究的主要内容和思路本研究的主要内容是双螺杆挤出机传动系统的分析和研究。
采用先进的动力学分析方法和计算机仿真技术,对双螺杆挤出机的传动系统进行建模和仿真,分析其动力学特性和传动机理,并进行优化设计。
1. 传动系统建模:根据双螺杆挤出机的结构特点,利用计算机辅助设计软件进行建模。
选择合适的材料和零部件,考虑传动系统的刚度和稳定性,建立传动系统的数学模型。
2. 仿真分析:根据建立的数学模型,利用ANSYS等先进的有限元分析和动力学仿真软件,对传动系统进行仿真分析。
分析传动系统的负载特性、动态响应和传动效率等。
3. 传动系统优化:根据仿真分析结果,对传动系统进行优化设计。
采用先进的材料和工艺,优化传动系统的结构和布局,提高传动效率和精度,保证设备的正常运行。
三、预期成果和实现途径本研究预期的成果为:深入研究双螺杆挤出机传动系统的动力学特性和传动机理,优化传动系统的结构和布局,提高传动效率和稳定性,为设备的正常运行提供技术支持。
同时,通过本研究的成果,可以为双螺杆挤出机的设计和生产提供参考和依据。
实现途径主要包括:(1)采用先进的动力学分析方法和计算机仿真技术,进行传动系统的建模和仿真;(2)利用先进的材料和工艺,对传动系统进行优化设计;(3)通过实验验证和比较分析,验证传动系统的优化效果和性能提升。
四、研究的难点和挑战双螺杆挤出机传动系统研究中的难点和挑战主要有以下几点:(1)传动系统的复杂度较高,需要建立准确的数学模型;(2)传动系统的运动学和动力学分析较为困难,需要采用先进的计算机仿真技术;(3)传动系统的优化设计需要考虑多个因素和约束,需要综合考虑各种因素和进行平衡;(4)传动系统的实验验证和效果分析需要具备较强的实验技能和数据分析能力。
双螺杆压缩机CFD仿真分析及实验验证
双螺杆压缩机CFD仿真分析及实验验证龙骥;何雪明;姜振钢【摘要】针对双螺杆压缩机流体域形状复杂并随时间变化的特点,运用STAR CCM+软件进行计算流体动力学(CFD)分析,并搭建试验平台验证分析结果的准确性.通过对比仿真监测点和与之相对应的试验实测点的压力,两者在压力值和压力波动周期等方面具有较好的一致性,验证了CFD分析结果的可信度.【期刊名称】《食品与机械》【年(卷),期】2018(034)009【总页数】6页(P106-110,146)【关键词】双螺杆压缩机;CFD;实验验证【作者】龙骥;何雪明;姜振钢【作者单位】江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院,江苏无锡 214122;江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院,江苏无锡 214122;江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院,江苏无锡 214122【正文语种】中文双螺杆压缩机具有可靠性高,操作维护方便、动力平衡好等优点,被广泛应用于制冷[1]、食品[2-3]等工业部门日常生产过程中,如易拉罐、饮料瓶的清洗和原料搅拌、发酵等[4-5]。
双螺杆压缩机具有2个结构特殊的转子,转子与机壳构成了一个复杂的空间,转子带动腔体内部的空气转动并完成压缩。
其内部的气体流场是一个典型的三维非稳态流场[6],此外,内部流体的流场特性还受到吸、排气孔口的形状[7]、位置以及主机机壳结构等其他因素的影响,通过一般方法研究压缩机内部的特性,如流速、温度等,具有一定的难度,而采用CFD方法对双螺杆压缩机进行仿真分析,可以有效地提高设计效率。
CFD计算将原本连续的物理量场用有限个离散点的变量值代替,按照一定规则建立离散点变量之间的关系方程并求解出场变量的近似解[8-9],为解决通常双螺杆压缩机流体域采用非结构化网格计算无法获得一个完全守恒解决方案的问题,网格划分时采用多个软件对流体域进行混合处理的方式,而且该法可以克服以往Fluent动网格计算时易出错和为方便计算进行人为放大阴阳转子间间隙的问题,提高了仿真结果的可信度[10]。
双螺杆泵流场动力特性的数值模拟
双螺杆泵流场动力特性的数值模拟唐倩;张元勋;高瞻【摘要】提出一种新型高效、密封性能更优越的渐开线修形双螺杆泵,并基于有限容积方法与摆线型双螺杆泵进行对比,建立两种泵的数值仿真模型,分析其压力场、速度场等的基本规律及特性曲线,得出了双螺杆泵流道的容积效率.研究表明:流道压力随密封腔逐级增大,且同级压力由于泄漏作用呈减小趋势;流道螺槽内存在涡流现象,啮合区混合强烈,在转子与泵套壁面接触区域及啮合区存在负轴向速度,为主要泄漏区域;渐开线修形双螺杆泵容积效率相对较高,密封性能更优越.研究结果为螺杆泵开发以及性能预估提供了理论指导和依据.【期刊名称】《中国机械工程》【年(卷),期】2010(021)012【总页数】5页(P1453-1457)【关键词】双螺杆泵;渐开线;修形;流场;数值模拟;涡流【作者】唐倩;张元勋;高瞻【作者单位】重庆大学机械传动国家重点实验室,重庆,400044;重庆大学机械传动国家重点实验室,重庆,400044;重庆中冶赛迪工程技术股份有限公司,重庆,400013【正文语种】中文【中图分类】TB1260 引言双螺杆泵以其节能环保、平稳可靠等优点,广泛应用于石油、环保等支柱产业。
目前所有对螺杆泵螺杆传动系统的研究均是围绕螺杆转子型线的修正和转子力学性能展开的,而对于螺杆内部流场的流道特性、系统的动态特性等关键技术的研究还未见报道。
泵内流体的流动状态具有复杂、非定常、不可压缩、黏性等特性,直接影响螺杆泵的性能,由于双螺杆泵几何结构及流动特性复杂,很难采用数学解析求解,因而如采用试验方法来验证几何设计的合理性,会耗费大量的人力和资金[1-7]。
本文以自主设计的渐开线修形双螺杆泵为研究对象,基于有限容积法,对螺杆泵内部流场的速度、压力进行流体动力学分析,得出双螺杆泵内部流场主要特征和分布规律,进而研究其结构改进及性能改善的方法,为双螺杆泵的设计提供理论依据。
1 双螺杆泵结构设计及仿真模型1.1 螺杆的结构设计由双螺杆泵工作原理知,相互啮合的两根螺杆的啮合线将螺旋槽分割成互不相通的腔体,其齿廓曲线一般采用外长摆线;而仅有外长摆线时,齿顶处的夹角小于90o,齿顶处的螺旋线与主螺杆的螺旋面相啮合,主要起密封作用,因此齿顶的锐角在主螺杆、从螺杆相互啮合传递力矩时必然会很快磨损,从而破坏螺杆泵的密封性[8-9]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1卷 第3期石河子大学学报(自然科学版) Vol.1 No.3 1997年9月Journal of Shihezi University(Nat ural Science)Sep.1997计算机仿真技术对双螺杆动态模拟的研究孙建新1 王增民2(1机械电气工程系 2山西兴安化学材料厂)提要 利用计算机仿真技术对双螺杆进行动态模拟仿真研究,讨论了双螺杆在啮合运行过程中的关键技术及本动态模拟软件实现过程中的几个重要问题。
关键词 双螺杆 啮合 动态模拟 软件中图分类号:S220.21 概述各种双螺杆机是现代部分可塑性物料的混炼造粒加工业、连续反应加工业和挤出成型加工业的关键设备,而其中的两根螺杆又是该类设备最为关键的核心部件。
双螺杆部件在实际应用中,按结构分为整体式和组合式(积木式),按形式可分为平行式和锥形式的,按工作时的旋转方向还可分为同向旋转和异向旋转的。
由于双螺杆机工作时,两根螺杆在机体内是要进行啮合旋转的,即一根螺杆上的螺棱和螺槽要分别与另一根螺杆上的螺槽和螺棱相互啮合,以便对被加工的物料能进行强烈的搅拌和捏合,使之能充分的塑化和反应,并强制向前输送。
所以,两根螺杆的工作表面受力状况很复杂,有的表面温度还很高;并且在两根螺杆啮合运行过程中,其空间结构的位置变化状况也十分复杂,因而螺杆的结构设计难度很大,设计计算量十分繁重,对加工的尺寸精度和表面质量要求很高,最终的加工费用十分昂贵。
而可塑性物料的加工部门,为了能在一台双螺杆设备上加工尽可能多品种的物料和产品,一般均采用组合式螺杆结构的双螺杆机。
因为这种结构的两根螺杆是由芯轴和装于芯轴上的众多螺纹元件所组成的,它们能根据各种物料的不同性能和对产品的要求,可进行任意结构形式的组装,以满足实际工艺的不同要求。
但这种结构的双螺杆零部件,无论是设计,还是机械加工,其难度都是最大的,因而其加工费用也是最高的。
目前的设计和加工状况是,每当设计完一套双螺杆零部件后,一般是先根据其施工图的要求,作出芯轴和各种螺纹元件的实际模型,按实际要求进行组装,然后模拟啮合试验情况,检查啮合状况、顶底间隙和侧面间隙,再把有关信息反馈于设计部门,设计部门根据模拟啮合试验情况,对设计不合适的地方进行修改和完善。
如此反复进行,直到对模拟试验满意后,才进行机械加工。
即使如此,但由于模型的原因,往往会产生实际加工出的双螺杆设备不能满足设计和化工工艺要求的情况,轻者是相互啮合的一对螺杆之间的啮合间收稿日期:1997-07-15隙不合适,重者则是两根螺杆出现互为干涉的现象,从而无法正常工作。
这样既延长了设计和机械加工的周期,浪费了企业大量的人力和物力,又增加了制造成本,同时还不能很好地满足生产要求。
在这种情况下,利用计算机仿真技术对双螺杆进行动态模拟仿真研究具有十分重大的意义。
2 动态模拟观察面和间隙变化计量面的选择2.1 双螺杆的基本结构简介目前使用的双螺杆都是多段、多头和不同螺距的相互啮合型螺杆。
对于同向旋转的双螺杆来说,两根螺杆上相应部位的螺纹元件,除了螺纹起点相对内花键的位置不同外,其余结构要素是完全相同的;而对于反向旋转的双螺杆来说,两根螺杆上相应部位的螺纹元件,除了螺纹起点相对内花键的位置,以及螺纹的螺旋方向不同外,其余结构要素是完全相同的。
但不论何种类型的双螺杆,其两根螺杆相互啮合的侧面间隙,一般均要求在0.25~1.0m m 之间,一根螺杆上螺纹的螺顶与另一根螺杆上螺槽的螺底的啮合间隙,一般均要求在0.5~1.1mm 之间。
故对每条螺纹线的起始点相对于内花键的位置要求和牙形尺寸要求都很精确。
不然的话,在啮合运行过程中,不是啮合间隙不合适,就是产生相互干涉现象,结果使双螺杆设备不能正常工作。
2.2 对模拟部位、模拟观察面和间隙变化计量面的选择双螺杆啮合旋转时,其轴向视图(从垂直于两根螺杆中心线所构成的平面方向观察)是由两根螺杆及其空间啮合区叠加后而形成的,其中有的啮合点就无法观察到,即使能看到的众多啮合点也不是在其实际位置,这样的轴向视图是不能反映双螺杆的实际啮合状态的。
如果采用轴向剖面图,那么只有通过轴向剖面的啮合点可以反映出来,而其它更多的啮合点却无法反映出来,故这种情况也是不能反映实际状态的。
如若采用轴侧图,倒是可以反映两根螺杆的实际啮合状况,但由于同一时刻的全部啮合点处于空间立体位置,直观、形象,便于视觉观察。
但是,利用计算机自动测量其啮合间隙的原理十分复杂,量化结果不准确,所以,这种方法并不实用。
图1 动态模拟观察面和间隙变化计量面设想在无间隙啮合情况下,把螺纹元件一个导程的结构要素在一个运行周期(注:对单头螺纹来说,为螺杆转一圈;对双头螺纹来说,为螺杆转半圈;对三头螺纹来说,为螺杆转三分之一圈;以此类推。
)内的啮合点有选择的投影到垂直于螺杆中心线的端面,则这些啮合点形成一个封闭的啮合图形,再根据这个封闭的啮合图形和啮合间隙(侧面间隙和顶底间隙)值,绘制出有间隙啮合的封闭图形。
在双螺杆运转过程中的任意一时刻,通过对两个位置相对固定的端面封闭图形进行分析可知:在纵向座标相同情况下,其横向最小间距即为此刻的间隙值。
通过计量一个运行周期内间隙变化的瞬时值,就可以得到双螺杆在整个运行过程中啮合间隙变化的定量结果,故就选轴向端面为动态模拟观察面和间隙变化计量面,如图1223 第3期孙建新等:计算机仿真技术对双螺杆动态模拟的研究所示。
2.3 轴向坐标向端面坐标转换通常,对双螺杆中的螺纹元件进行机械加工时,需要的是螺纹元件的轴向牙形坐标。
所以,在设计出的施工图上,也仅有轴向牙形的坐标。
而要对螺纹元件的螺纹结构要素进行计算机动态模拟时,又需要轴向牙形的端面坐标,这就需要把螺纹元件的轴向牙形坐标转换为端面坐标。
转换的方法是利用轴向点集的平面方程及其法向量,结合螺旋曲面方程进行推导变换,即可得出如下的转换公式:x d =(D i 2)2-y 3d y d =D i 2・sin 2 L・x 其中:y d 为螺杆端面纵坐标;D i 为螺杆外径;x d 为螺杆的端面横坐标;L 为螺杆的螺纹导程;x 为螺杆轴向横坐标。
3 动态模拟软件设计的具体过程3.1 软件实现的支持环境为了实现利用计算机对双螺杆的啮合旋转状况进行动态模拟,并能够获得所需要的一系列动态模拟结果,在此选用C 语言作为编程语言。
为了使该软件具有较好的移植性和功能的可扩充性,在图形操作与处理问题上,采用了开放的图形管理机制和通用的图形转换接口。
3.2 双螺杆动态模拟软件应具有的功能作为一个双螺杆的动态模拟软件,作者认为它一方面应能检验双螺杆的螺纹元件的设计思想和可靠性;另一方面,应能通过对双螺杆进行动态模拟啮合试验后,向设计部门反馈有关的信息。
所以,该动态模拟软件应具有以下的功能:1)能直观的反映出双螺杆的整个啮合旋转过程;并能反映出在一个运行周期内,两根螺杆啮合位置在啮合区内的变化情况和啮合间隙的变化情况,如图2所示。
图2 啮合区内和啮合间隙的变化情况图3 相关参数之间的函数关系224石河子大学学报(自然科学版)第1卷 2)能使双螺杆以任意的速度啮合旋转;能准确计量出在某一速度要求下一个运行周期的大小;能准确测量出双螺杆在一个运行周期内以一定速度运行时,其啮合间隙变化的瞬时值,并能自动计算出间隙变化的最大值和最小值。
3)在双螺杆以某一速度啮合旋转一个运行周期后,能自动显示并打印出2)中所计量出的各项结果数值;能把2)中所计量出的各项结果数值,以坐标曲线图的形式,在屏幕上显示出相关参数之间的函数关系,并能将该坐标曲线图从打印机上打印输出,如图3所示。
3.3 双螺杆动态模拟软件实现过程中的几个重要问题和关键技术3.3.1 动态原理该软件要求能使双螺杆零部件的静态图形可动态地绕其中心以任意速度旋转运行,也就是说,能把静态图形变为动态图形。
根据CAD-Com puter Aided Design 原理,需要把组成图形的点集坐标,利用点的平移矩阵S N 、旋转矩阵S 及其逆矩阵S S 进行复合变换,以求出新位置上组成图形的点集坐标,然后把组成图形的点集坐标用光滑的曲线连接成封闭图形,就得到双螺杆以某一速度啮合旋转后在新一位置上的图形。
1)三个矩阵是S N =100010x 0y 01 S =-cos sin 0-sin cos 0001 S S =100010-x 0-y 012)新一位置上点的坐标计算公式x =x 1・cos -y 1・sin +x 0・(1+cos )+y 0・siny =x 1・sin +y 1・cos +y 0・(1+cos )-x 0・sin其中:(x ,y )为新位置点的坐标;(x 1,y 1)为旧位置点的坐标;(x 0,y 0)为旋转中心位置的坐标; 为图形微转角。
3.3.2 动画处理技术在动画过程中,设备运行涉及背景图形的变化。
如图旋转到下一位置后,如何恢复背景,这是一个动画技术问题。
传统的动画处理技术有:擦画方式、托动方式、保存背景恢复背景方式和与或方式等。
作者通过对第3种方式进行改进,采用了新的技术来实现这一操作过程,使用中取得了理想的动画效果。
其技术原理如下:根据可转换活动页原理,系统在图形运行前,先根据该图形的参数,为其在计算机的内存中开辟一个图形的缓冲区,用于保存其所要覆盖的背景图形。
用函数void far setac-tiv epage (int pag )设置活动页或内存区域,活动图形页可以是当前显示页面,也可以是非显示页面。
当用函数v oid far setactiv epage ()选定某一页为活动页后,其后所有的图形输出都是针对这一页的。
视频内存有了多个图形页后,程序就可以将图形输出到那一个非显示屏幕页上,然后通过调用函数void far setvisvalpag ()来改变可见面,以便快速显示关闭图形页面中的画面。
本软件的实施过程中,使用2个页面,当一个可见页面用于显示时,另一个关闭页面用于绘图。
当新的画面生成后,就把两页面进行转换,原作为显示的页面再用来绘制新的图形。
若将画面的显示顺序作以下安排,那就是:第1页用左显示动画过程的第1、3、5225 第3期孙建新等:计算机仿真技术对双螺杆动态模拟的研究……,第2页用右显示动画过程的第2、4、6……,如此交替显示下去。
利用页面转换技术进行图象的动态显示,图形的擦除和重画过程都是在“后台”进行的,屏幕上出现的仅是整幅画面的瞬间切换,从根本上解决了图形的闪烁问题,其动态特性十分平滑;并且上述操作大部分是基于内存拷贝操作,减少了与或操作和擦画操作等所用的时间,提高了图形的旋转运行速度,动画效果良好。
3.3.3 双螺杆啮合旋转过程中瞬间啮合间隙的计量从理论上讲,双螺杆的瞬间啮合间隙是指在其运行过程中的某一瞬间表示双螺杆的两图形上在纵向坐标相同情况下的最小横向间距,但是,因为实际的瞬间图形是由有限个点连接而成的光滑封闭曲线,组成图形的这有限个点毕竟是分散的,而两根螺杆在啮合旋转时,根据啮合原理,表示双螺杆的两图形在相位上必须有严格的要求。