习题课A(10月28日PPT)北航理论力学王琪
合集下载
理论力学习题答案 谢传峰、王琪 高等教育出版社
− F4 cos 450 ⋅ a − F6 cos 450 ⋅ a = 0 F1 ⋅ a + F6 cos 450 ⋅ a − F sin 450 ⋅ a = 0 F1 ⋅ a + F3 ⋅ a − F sin 450 ⋅ a = 0 F3 ⋅ a + F5 ⋅ a − F4 cos 450 ⋅ a = 0
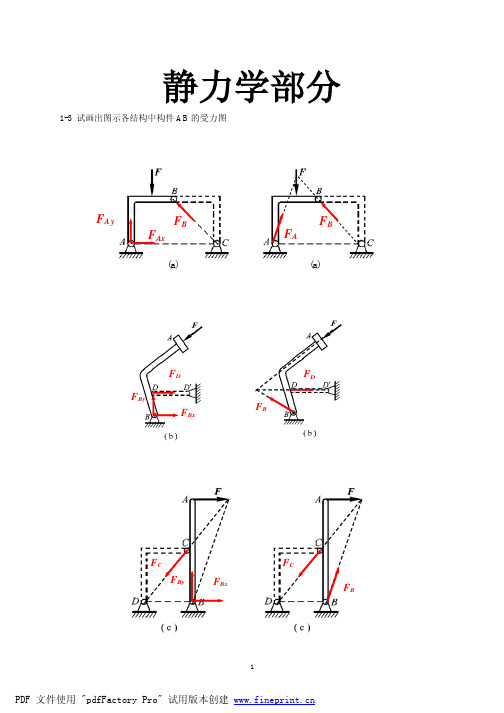
静力学部分
1-3 试画出图示各结构中构件 AB 的受力图
FA y FAx
FB
FA
FB
(a)
(a)
FD FBy FBx FB
FD
FC FBy FBx
FC FB
1
PDF 文件使用 "pdfFactory Pro" 试用版本创建
1-4 试画出两结构中构件 ABCD 的受力图
即棒料左侧脱离 V 型槽,与题意不符,故摩擦系数
8
PDF 文件使用 "pdfFactory Pro" 试用版本创建
2-33 均质杆 AB 长 40cm,其中 A 端靠在粗糙的铅直墙上,并用绳子 CD 保持平衡,如图所示。设
BC = 15cm, AD = 25cm ,平衡时 α 角的最小值为 45o 。试求均质杆与墙之间的静摩擦因数 f s 。
FBx
1-8 在四连杆机构的 ABCD 的铰链 B 和 C 上分别作用有力 F1 和 F2, 机构在图示位置平衡。 试求二力 F1 和 F2 之间的关系。 解:杆 AB,BC,CD 为二力杆,受力方向分别沿着各杆端点连线的方向。 解法 1(解析法) 假设各杆受压,分别选取销钉 B 和 C 为研究对象,受力如图所示: 由共点力系平衡方程,对 B 点有:
F4 = F1 =
2 F 2
北京航空航天大学理论力学课件-王琪-ch5A
O
vx = x &⎫ ⎪ vy = y &⎬ ⎪ vz = z &⎭
2015-10-28
x
加速度
x & & = a x = 0(m/s 2 )
y & & = a y = −10(m/s 2 )
曲率半径 v2 v2 20 ρ= = = m 0 an a cos 30 3
20
ax = & x& ⎫ ⎪ ay = & y &⎬ ⎪ az = & z& ⎭
2、P 点的速度和加速度
2015-10-28 8
理论力学
3、P点的运动轨迹
§5-1 点的运动学
y A P O
θቤተ መጻሕፍቲ ባይዱ
B
ϕ
x
l 2 ⎫ xp = R cosθ + L − R2 sin2 θ ⎪ L ⎬ R ⎪ y p = (L − l ) sinθ ⎭ L
消去上述方程中 参数θ可得 P 点 的轨迹方程。
z
&⎫ 解: v x = x ⎪ vy = y &⎬ ⎪ vz = z &⎭
u
v= x &2 + y &2 + z & = R2ω2 + u2 = const &2 = s
2 a= & x y z &2 + & &2 + & &2 = Rω
ωR
ax = & x& ⎫ ⎪ ay = & y &⎬ ⎪ az = & z& ⎭
T’
•曲率(curvature)
北航 王琪教授讲义
• 在实践的基础上创新
– 在解决问题的过程中“有问题可思考”,“有方法可推敲”, 善于提出自己的观点与方法,培养创新意识。
4
汇报的主要内容
• 目标与理念 • 内容与实践 • 体会与设想
5
内容与实践
1. 探究型课堂教学模式 2. 探究型实践教学平台 3. 科研与教学有机融合
6
1、探究型课堂教学模式 原有的课堂教学模式:
• 实验装置的来源:
– 购置和自制结合
27
数值仿真实验
• 实验目的:
– 应用数值仿真揭示力学现象 – 解决数值仿真中遇到的力学和数学问题 – 定性分析与定量分析的结合
• 实验内容:
– 习题中的数值仿真算例 – 实际工程问题的数值仿真算例
28
数值仿真实验
非光滑质点动力学仿真: 数值 方法给出质点位置、速度和切 向加速度随时间的变化规律
θ 0 = 0 rad , θ 0 = 0 rad/s, f = 0 .1
O
θ
r
mg
θ (t ) θ (t ) θ (t )
t(s)
29
数值仿真实验
掌握应用定性分析 方法判断数值仿真 结果的正确性。
30
数值仿真实验 倒摆数值 仿真实验
A
1 2 1 mLθ + cθ + kθ − mgLsinθ = kbcost 3 2
实现4个结合
• 定性分析与定量分析结合 • 解析分析与数值分析结合 • 理论研究与实际应用结合 • 传授知识与能力培养结合
10
1、探究型课堂教学模式
定性分析与定量分析结合 解析分析与数值分析结合
11
1、探究型课堂教学模式
理论研究与实际应用结合
理论力学课后答案-谢传峰、王琪-动力学第九章、第十章
1 2
2l m dx(
x sin )2 0 2l
2 ml 2
2 sin2 3
O C
系统的动能 T T1 T2 。 取 900 为势能零点,则系统的势能为:
V mgl cos
则拉格朗日函数:
L T V 2 ml2 (2
2 sin2 ) mgl cos 3
x
楔块 B 的速度 vB ,以及 B 相对于 A 的相对速度
满足如下的矢量关系(方向如图所示):
vB vA vBr
系统的动能为:
vBr vA
T
1 2
m
Av
A
2
1 2
mBvB 2
P1 2g
x 2
P2 2g
[(x
s cos)2
(ssin)2 ]
1 2g
(P1
P2 )x 2
度
转动。物体的质心 G 在垂直于 O1O2 的直线上,O3G l 。设 O1O2 和 O3G 是物体过 O3
点的惯量主轴,转动惯量为 J1 和 J 2 ,物体对另一过 O3 点的惯量主轴的转动惯量为 J 3 ,试
求物体的动能表达式并建立物体的运动微分方程。 解:
以该物体为研究对象,有一个自由度,取 O3G 和 OC 的夹角 为广义坐标。若以框架 O1O2OC 为动系,则物体的相对运动是以角速度 绕轴 O1O2 的定轴转动,牵连运动是以角 速度
垂直于 O1O2 的平面
z’
O3
θ G
y’
坐标系 O3 x y z 的三个坐标轴为过 O3 点的三个惯量主轴,则系统的动能为:
T
北航理论力学王琪
2010-5-15 3
理论力学
笔记本电脑
问题的引出
硬盘自动保护装置
2010-5-15
4
理论力学
计算机硬盘结构示意图
问题的引出
定点运动刚体动力学问题:研究力与运动间的关系。 问题:用什么方法建立力与运动的关系?
2010-5-15 5
理论力学
§6-2 欧拉动力学方程
z
一、刚体定点运动的动量矩
Ox’y’z’为随体参考系 Oxyz 为惯性参考系 刚体对O点的动量矩:
2010-5-15
x
o
y
y'
整个刚体对O 点的动量矩:
LO = ∑ LOi
7
理论力学
§6-2 欧拉动力学方程
LOi = mi [( y 'i2 + z 'i2 )ω x ' − x'i y 'i ω y ' − x'i z 'i ω z ' ]i ' + mi [− x'i y 'i ω x ' + ( x'i2 + z 'i2 )ω y ' − y 'i z 'i ω z ' ] j ' + mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
+ ∑ mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
理论力学
笔记本电脑
问题的引出
硬盘自动保护装置
2010-5-15
4
理论力学
计算机硬盘结构示意图
问题的引出
定点运动刚体动力学问题:研究力与运动间的关系。 问题:用什么方法建立力与运动的关系?
2010-5-15 5
理论力学
§6-2 欧拉动力学方程
z
一、刚体定点运动的动量矩
Ox’y’z’为随体参考系 Oxyz 为惯性参考系 刚体对O点的动量矩:
2010-5-15
x
o
y
y'
整个刚体对O 点的动量矩:
LO = ∑ LOi
7
理论力学
§6-2 欧拉动力学方程
LOi = mi [( y 'i2 + z 'i2 )ω x ' − x'i y 'i ω y ' − x'i z 'i ω z ' ]i ' + mi [− x'i y 'i ω x ' + ( x'i2 + z 'i2 )ω y ' − y 'i z 'i ω z ' ] j ' + mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
+ ∑ mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
北航《理论力学(第二学期)》考题整理
A
(a)
B
A
(b)
B
A:情况(a)时 AB 杆的角加速度大; B:情况(b)时 AB 杆的角加速度大; C:条件不足,不能确定。 二、 填空题(第 8 小题 5 分,其余每空 4 分,共 65 分, 将计算的最简结果填写在 空格上) 1、定轴转动刚体绕 O 轴在铅垂面内运动,若其质量为 2m,对转轴的转动惯量为 J, 质心到转轴的距离 OC=b,根据系统的广义坐标 (如图 3 所示) , 建立其运动微分方 程。答:运动微分方程为: 2、匀 质 三 角 板 用 圆 柱 铰 链 与 铅 垂 的 AB 杆 和 CD 杆 连 接 , 如 图 4 所 示 。 已 知
=
O
。
已知图示瞬时刚体的角速度为 (方向由 O 点指向 A B 点) ,角加速度为 (方向由 O 点指向 B 点) 。求正
4
A
图7
北京航空航天大学交通科学与工程学院《理论力学(第二学期) 》复习资料
方体上顶点 B 速度 vB 和加速度 aB 。 答:
B 点速度的大小 vB = B 点加速度的大小 aB =
4、两个相同的均质杆 AC、BC(各质量均为 m 长为 L)由铰链 C 连接在图示平面内 运动,已知图示瞬时铰链 C 的速度大小为u,杆的角速度的大小为ω,方向如图 3A-D 所示,则该瞬时图 3_______所示情况,系统得动能最大。
AB=2L,CD=AC=L,各刚体的质量分别为 m1 , m2 , m3 ,若图示瞬时 AB 杆
3
北京航空航天大学交通科学与工程学院《理论力学(第二学期) 》复习资料
的角速度为 (方向如图)。该瞬时系统动量的大小 P=
。
B
O
m2
D
北航理论力学王琪
理论力学
上次课的主要内容
§3-1 刚体平面运动的运动学
研究刚体平面运动速度问题的几种方法: 1、基 点 法: v B = v A + v BA
y
ω
y'
vBA
B
vB β B vA vA
2、速度投影法: [v B ]AB = [v A ]AB
v M = v MP = ω × rPM 3、速度瞬心法:
A r0
上式在铅垂轴上投影: aBA cosθ = aB =
t n
上式在水平轴上投影:
t aBA sin
θ
t = aB
u L u
2
A
B
θ
α AB =
t aBA
u = 2 AB L cosθ
2
α BC
t aB u2 = = 2 tan θ BC L
u2 aB = α AB L = L cosθ
8
2009-12-11
α
ω
vr O ar
a
vr ω= R
u
v &r − ar α =ω &= = R R
v rB = v rO + v rBO v aB = v eB + v rB v aB = v e + v rO + v rBO
12
2、求圆盘最高点B的速度
A
vaB = u − vr − ωR = u − 2vr
2009-12-11
16
理论力学
§3-1 刚体平面运动的运动学
例:图示机构中,AB杆的A端以速度 u 匀速运动,求图示瞬时
DE杆的角速度。已知该瞬时,AB杆与水平线的夹角为450,套
筒D 位于AB杆的中点,DE杆水平。
北京航空航天大学理论力学课件-王琪-ch3A
M
2015-9-30 8 问题:如何解除多余的约束,使其变为静定问题。
静不定系统实例
B
F C
理论力学
3 A
M
§3-1 刚体系的平衡
B 2 B
M
F
2
C
A 方法一: A
M
F C F C F C
9
方法二:
B
方法三:?
2015-9-30
A
M
B
理论力学
二、刚化原理
§3-1 刚体系的平衡
变形体在某一力系作用下处于平衡,若将处于平衡状 态时的变形体换成刚体(刚化),则平衡状态不变。 F F (a) F (b) 应用该原理,可将刚体平衡的基本理论与方法用于 研究刚体系的平衡问题。
按空间分布形式可分为201593025理论力学32桁架桁架的节点工程上把几根直杆连接的地方称为节点工程上把几根直杆连接的地方称为节点201593026理论力学32桁架榫接木桁架节点201593027理论力学32桁架钢桁架节点铆接焊接201593028理论力学32桁架钢筋混凝土桁架节点刚接201593029理论力学32桁架假设1
15
理论力学
例 已知 R, L, W1, G, W2。 求:圆筒保持平衡的条件。
L
§3-3 刚体系的平衡
问题:有几个力作用在圆筒上? 若研究圆筒,有几个未知量? 解:1、取两个球为研究对象 FC
G
R
FB
W1
R
θ
W2
O
θ
W2
W1
FA
L − 2R 几何关系: cos θ = 2R
2015-9-30
∑ F = 0 ,→ F ∑M = 0
FB
√
F3
2015-9-30 8 问题:如何解除多余的约束,使其变为静定问题。
静不定系统实例
B
F C
理论力学
3 A
M
§3-1 刚体系的平衡
B 2 B
M
F
2
C
A 方法一: A
M
F C F C F C
9
方法二:
B
方法三:?
2015-9-30
A
M
B
理论力学
二、刚化原理
§3-1 刚体系的平衡
变形体在某一力系作用下处于平衡,若将处于平衡状 态时的变形体换成刚体(刚化),则平衡状态不变。 F F (a) F (b) 应用该原理,可将刚体平衡的基本理论与方法用于 研究刚体系的平衡问题。
按空间分布形式可分为201593025理论力学32桁架桁架的节点工程上把几根直杆连接的地方称为节点工程上把几根直杆连接的地方称为节点201593026理论力学32桁架榫接木桁架节点201593027理论力学32桁架钢桁架节点铆接焊接201593028理论力学32桁架钢筋混凝土桁架节点刚接201593029理论力学32桁架假设1
15
理论力学
例 已知 R, L, W1, G, W2。 求:圆筒保持平衡的条件。
L
§3-3 刚体系的平衡
问题:有几个力作用在圆筒上? 若研究圆筒,有几个未知量? 解:1、取两个球为研究对象 FC
G
R
FB
W1
R
θ
W2
O
θ
W2
W1
FA
L − 2R 几何关系: cos θ = 2R
2015-9-30
∑ F = 0 ,→ F ∑M = 0
FB
√
F3
理论力学高等教育出版社谢传峰王琪第十一章课件
2 v0 Tmax G (1 ) gl
[注]①减小绳子拉力途径:减小跑车速度或者增加绳子长度。 ②拉力Tmax由两部分组成, 一部分等于物体重量,称为静拉力 一部分由加速度引起,称为附加动拉力。全部拉力称为动拉力。
10
2.第二类:已知作用在质点上的力,求质点的运动(积分问题) 已知的作用力可能是常力, 也可能是变力。变力可能是时间、 位置、速度或者同时是上述几种变量的函数。 解题步骤如下: ①正确选择研究对象。 ②正确进行受力分析,画出受力图。判断力是什么性质的力 (应放在一般位置上进行分析,对变力建立力的表达式)。 ③正确进行运动分析。 (除应分析质点的运动特征外,还要确定 出其运动初始条件)。
1.第一类:已知质点的运动,求作用在质点上的力(微分问题)
解题步骤和要点:
①正确选择研究对象(一般选择联系已知量和待求量的质点)。
②正确进行受力分析,画出受力图(应在一般位置上进行分析)。
③正确进行运动分析(分析质点运动的特征量)。
④选择并列出适当形式的质点运动微分方程(建立坐标系)。 ⑤求解未知量。
11
④选择并列出适当的质点运动微分方程。
⑤求解未知量。应根据力的函数形式决定如何积分,并利用运
动的初始条件,求出质点的运动。 如力是常量或是时间及速度函数时, dv 可直接分离变量 dt 积分 。 如力是位置的函数,需进行变量置换
dv dv v , 再分离变量积分。 dt ds
12
[例2] 煤矿用填充机进行填充, 为保证充 填材料抛到距离为S=5米,H=1.5米的顶 板A处。求 (1)充填材料需有多大的初速 度v0 ? (2)初速 v0 与水平的夹角a0? 解:属于已知力为常量的第二类问题。 选择填充材料M为研究对象,受力如图所示,M作斜抛运动。
[注]①减小绳子拉力途径:减小跑车速度或者增加绳子长度。 ②拉力Tmax由两部分组成, 一部分等于物体重量,称为静拉力 一部分由加速度引起,称为附加动拉力。全部拉力称为动拉力。
10
2.第二类:已知作用在质点上的力,求质点的运动(积分问题) 已知的作用力可能是常力, 也可能是变力。变力可能是时间、 位置、速度或者同时是上述几种变量的函数。 解题步骤如下: ①正确选择研究对象。 ②正确进行受力分析,画出受力图。判断力是什么性质的力 (应放在一般位置上进行分析,对变力建立力的表达式)。 ③正确进行运动分析。 (除应分析质点的运动特征外,还要确定 出其运动初始条件)。
1.第一类:已知质点的运动,求作用在质点上的力(微分问题)
解题步骤和要点:
①正确选择研究对象(一般选择联系已知量和待求量的质点)。
②正确进行受力分析,画出受力图(应在一般位置上进行分析)。
③正确进行运动分析(分析质点运动的特征量)。
④选择并列出适当形式的质点运动微分方程(建立坐标系)。 ⑤求解未知量。
11
④选择并列出适当的质点运动微分方程。
⑤求解未知量。应根据力的函数形式决定如何积分,并利用运
动的初始条件,求出质点的运动。 如力是常量或是时间及速度函数时, dv 可直接分离变量 dt 积分 。 如力是位置的函数,需进行变量置换
dv dv v , 再分离变量积分。 dt ds
12
[例2] 煤矿用填充机进行填充, 为保证充 填材料抛到距离为S=5米,H=1.5米的顶 板A处。求 (1)充填材料需有多大的初速 度v0 ? (2)初速 v0 与水平的夹角a0? 解:属于已知力为常量的第二类问题。 选择填充材料M为研究对象,受力如图所示,M作斜抛运动。
北京航空航天大学本科理论力学习题课动.ppt
dvr dvr dR dt dR dt
dR dt
vr
cos
mvr
cos
dvr dR
mR 2
cos
vrdvr R2dR
v2 r
2R2
C
22
aa 0, ae 2R, aC 2 vr
x': 0 ae arx' aC cos450 y': 0 0 ary' aC sin 450
ar
a2 rx '
a2 ry '
12
习题1-10:求滑块A的加速度绳索的拉力。
v0
s FvA
FN
mg
ma F FN mg
x : mx F cos mg
x
(
x2
2R4x R2)2
mx Fx
15
y’
方法三:求滑块的速度
动点:滑块A
vr
动系:ox’y’,x’轴平行于绳
速度分析
θ
运动分析
va v x’ e
绝对运动: 直线运动 相对运动: 直线运动 牵连运动: 定轴转动
va ve vr ve x vr ( )R
y : 0 ve vr sin x : x va vr cos
动点:圆盘中心O 动系:AB杆
A
AB
运动分析: 绝对运动: 直线运动
v r 300 n ae
相对运动: 直线运动 AB 牵连运动: 定轴转动
y'
aa
o ve Rar va
aB et
速度分析
vr 0,
va ve vr va ve
AB
ve OA
va 2R
加速度分析 aa aet aen ar aC
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BUAA
习题课I
2009-10-28 1
BUAA
对于刚体: •主矢 •主矩
平衡条件
基本原理与定理
{F1 , F2 , L , Fn } = {FR , M O }
FR = ∑Fi = ∑Fi '
i =1 n n
M O = ∑ M i = ∑ ri × Fi
n
i =1
n
FR = 0, M O = 0
1
2
C
D
设:杆1的长度为L
2009-10-28
dL < 0
28
BUAA
C D
E
C D 设:CD杆的长度为L dL > 0
2009-10-28 29
BUAA
思考题:系统如图所示。若人重W < > 板重P且人有足够大的 力量。下列两种情况中,哪个系统能在图示位置维持平衡?
(a)
(b)
A:图(a)
2009-10-28
z
F1
o
FR
F2
y
⎧ ∑ M l1 = 0 ⎪ ⎨ ∑ M l2 = 0 ⎪ ⎩ ∑ M l3 = 0
确定三根轴的位置
4
x
2009-10-28
Fn
BUAA
题8:给出空间平行力系平衡方程的三矩式
z
FR
Fi
y
o
x
MO
⎧∑ M x = 0 ⎪ ⎨∑ M y = 0 ⎪ ⎩∑ M L = 0
如何确定L轴?
2009-10-28
F1
D:力螺旋
F2
3
BUAA
题5:空间汇交力系的平衡方程独立的充分必要条件:
⎧ ∑ Fx = 0 ⎪ ⎨∑ Fy = 0 ⎪ ⎩ ∑ Fz = 0
A:三个轴正交; B:三轴不共面; C:三轴相交不共面; D:三轴的单位向量不相关
题6:空间汇交力系的平衡方程能否用取矩式给出? 题7:给出空间汇交力系的平衡方程的三矩式:
a f< b a f≥ b
fWA 则 WB ≤ (1 − f b a)
则 WB 可以任意大
ϕ < ϕmax
b
b
FR ϕ
< a = tan β
ϕm
a
β WA
ϕ ≤ ϕ max < β
2009-10-28
23
BUAA
a 几何解释: f = b
tan ϕ m = f
ϕ ≤ ϕmax
b a
ϕm
β
a = tan β = b
2009-10-28
l3
FR = 0
6
BUAA
题10:系统如图所示,指出正确的受力图。
2009-10-28
7
BUA-28
8
BUAA
题12:系统如图所示,不计所有摩擦,指出其中的平衡系统。
2009-10-28
9
BUAA
题13:确定支座A的约束力方向(不计构件自重和所有摩擦) C B A
2009-10-28 18
BUAA
题23:作业习题分析:已知P,M,D,求平衡时的摩擦系数 方法一 M P
FN 1 FS 1 FN 2
平衡条件
FS 2
无滑动临界条件
∑ ∑ ∑
2
Fx = 0 Fy = 0 M
o
F S 1 = fF N 1 F S 2 = fF N 2
f1 <1 f2 >1
= 0
af
B:图(b)
C:图(a)和(b)
30
BUAA
例: 求图示结构中, CB 杆上C 端的约束力和杆1的内力. 已知:M, P, AE=EC=CD=DB=DH=EG=L,P作用在销钉C上
A
E 1
C
D
B
F1
FGA
G FGH
M
P
H
FCy C
解题思路: G 1、研究销钉G 2、研究结构右半部分 3、研究整体
2009-10-28
A
=0
WB
不滑动条件:F ≤ fFN
2009-10-28
FN a − Fb − WA a = 0
b FN = F + WA a
22
BUAA
b WB (1 − f ) ≤ fWA a
b (1)当 (1− f ) > 0 a b (2)当 (1− f ) ≤ 0 a
a 几何解释: f < b
tan ϕ m = f
0
P C
B
AC tan(450 − ϕ m ) = BC tan(450 + ϕ m )
1− tanϕm 1+ tanϕm AC = BC 1+ tanϕm 1− tanϕm
2009-10-28
1− tanϕm BC =± 1+ tanϕm AC
< 450 +
tan ϕm1 ≈ 0.224
20
三力汇交有: 0 < ϕm
M F
C
M1
B
F1
A
应用二力平衡原理(二力构件)
10
2009-10-28
BUAA
题14:确定支座A的约束力方向(不计构件自重和所有摩擦)
C A
M1
C B
M2
M1
B
A
M1 > M 2
2009-10-28
11
BUAA
题15:确定支座A的约束力方向。不计构件自重和所有摩擦
A
M
M
O
B
2009-10-28
结论:L 轴与 OZ 轴为异面直线
2009-10-28
5
BUAA
题9:四面体上作用有一空间任意力系,对该四面体六根轴 的取矩方程成立是否是平衡的充分条件。
MO
FR
l1
o
l2
⎧ ∑ M l1 = 0 ⎪ ⎨∑ M l2 = 0 ⎪ M =0 ⎩ ∑ l3
Mo = 0
⎧ ∑ M l4 = 0 {F1 , F2 , L , Fn } = {FR , M o } ⎪ ⎨ ∑ M l5 = 0 平衡条件: FR = 0 M o = 0 ⎪ ⎩ ∑ M l6 = 0
+ bf + c = 0
f2 > 1
若取
2009-10-28
FN 1 < 0
19
BUAA
方法二 d D O A
ϕm ϕm
M d= = 3.75cm P AC = R cos450 + d
BC = R cos450 − d
CD tan(45 − ϕ m ) = AC CD tan(450 + ϕ m ) = BC
2009-10-28
a
FB
25
BUAA
O
题26: 下图中的系统是否是静定结构?
B
D
B
D
C A G
2009-10-28
C E 瞬态机构 A G 静定结构 E
26
BUAA
题27: 下图中的系统是否是静定结构?
F
A
题28: 确定上图结构中铰链B约束力的方向
2009-10-28
B
27
BUAA
题29:确定杆1和杆2是受拉力还是受压力
BUAA
a
A
a
WA
O
题24:已知 WA, a,b,f。 求平衡时, WBmax
b
WB
21
2009-10-28
BUAA
a
A
a
WA
O
FN
b O
FOy
WB
F
解:1、研究圆盘
FO x W R − FR = 0 B
∑M
O
=0
F Ay
A
F = WB
2、研究板
FAx
F
WA
FN
WB (1 − f
∑M
b ) ≤ fWA a
D
B
FCx FGH
H
31
FB
BUAA
解: 1、研究整体
FAy
A
E
C
D
B
∑M
A
= 0 → FB
FAx
1 G
M
P
H B
2、研究分离体
FB
∑M = 0 → F ∑F = 0 → F ∑F = 0 → F
C x y
GH
FCy C
D
Cx Cy
FCx FGH
H
FB
F1
FGA
G FGH
3、研究销钉G
F1 = FGH
12
BUAA
题16:确定铰链A、B处约束力的方向 (不计构件自重和所有摩擦)。
先研究AD杆
A
D
F
再研究整体 B
L 2009-10-28 L L
C
13
BUAA
题17:确定支座A、B处约束力的方向 G E E C E G
M
D
H
M
C C
FB
D B
A A B
A
FA
应用:三力平衡定理、力偶的性质、刚化原理
i =1
i =1
两个力系等效条件: 两个力系的主矢相等、主矩也相等
2
2009-10-28
BUAA
题1: 空间平行力系简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题2: 一对平行不共线的力简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题3: 两个平面汇交力系构成的平面力系简化的最简结果 可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题4: 图中的两个力构成的力系简 化的最简结果可能是: A:平衡力系、B:力偶、 C:合力、
习题课I
2009-10-28 1
BUAA
对于刚体: •主矢 •主矩
平衡条件
基本原理与定理
{F1 , F2 , L , Fn } = {FR , M O }
FR = ∑Fi = ∑Fi '
i =1 n n
M O = ∑ M i = ∑ ri × Fi
n
i =1
n
FR = 0, M O = 0
1
2
C
D
设:杆1的长度为L
2009-10-28
dL < 0
28
BUAA
C D
E
C D 设:CD杆的长度为L dL > 0
2009-10-28 29
BUAA
思考题:系统如图所示。若人重W < > 板重P且人有足够大的 力量。下列两种情况中,哪个系统能在图示位置维持平衡?
(a)
(b)
A:图(a)
2009-10-28
z
F1
o
FR
F2
y
⎧ ∑ M l1 = 0 ⎪ ⎨ ∑ M l2 = 0 ⎪ ⎩ ∑ M l3 = 0
确定三根轴的位置
4
x
2009-10-28
Fn
BUAA
题8:给出空间平行力系平衡方程的三矩式
z
FR
Fi
y
o
x
MO
⎧∑ M x = 0 ⎪ ⎨∑ M y = 0 ⎪ ⎩∑ M L = 0
如何确定L轴?
2009-10-28
F1
D:力螺旋
F2
3
BUAA
题5:空间汇交力系的平衡方程独立的充分必要条件:
⎧ ∑ Fx = 0 ⎪ ⎨∑ Fy = 0 ⎪ ⎩ ∑ Fz = 0
A:三个轴正交; B:三轴不共面; C:三轴相交不共面; D:三轴的单位向量不相关
题6:空间汇交力系的平衡方程能否用取矩式给出? 题7:给出空间汇交力系的平衡方程的三矩式:
a f< b a f≥ b
fWA 则 WB ≤ (1 − f b a)
则 WB 可以任意大
ϕ < ϕmax
b
b
FR ϕ
< a = tan β
ϕm
a
β WA
ϕ ≤ ϕ max < β
2009-10-28
23
BUAA
a 几何解释: f = b
tan ϕ m = f
ϕ ≤ ϕmax
b a
ϕm
β
a = tan β = b
2009-10-28
l3
FR = 0
6
BUAA
题10:系统如图所示,指出正确的受力图。
2009-10-28
7
BUA-28
8
BUAA
题12:系统如图所示,不计所有摩擦,指出其中的平衡系统。
2009-10-28
9
BUAA
题13:确定支座A的约束力方向(不计构件自重和所有摩擦) C B A
2009-10-28 18
BUAA
题23:作业习题分析:已知P,M,D,求平衡时的摩擦系数 方法一 M P
FN 1 FS 1 FN 2
平衡条件
FS 2
无滑动临界条件
∑ ∑ ∑
2
Fx = 0 Fy = 0 M
o
F S 1 = fF N 1 F S 2 = fF N 2
f1 <1 f2 >1
= 0
af
B:图(b)
C:图(a)和(b)
30
BUAA
例: 求图示结构中, CB 杆上C 端的约束力和杆1的内力. 已知:M, P, AE=EC=CD=DB=DH=EG=L,P作用在销钉C上
A
E 1
C
D
B
F1
FGA
G FGH
M
P
H
FCy C
解题思路: G 1、研究销钉G 2、研究结构右半部分 3、研究整体
2009-10-28
A
=0
WB
不滑动条件:F ≤ fFN
2009-10-28
FN a − Fb − WA a = 0
b FN = F + WA a
22
BUAA
b WB (1 − f ) ≤ fWA a
b (1)当 (1− f ) > 0 a b (2)当 (1− f ) ≤ 0 a
a 几何解释: f < b
tan ϕ m = f
0
P C
B
AC tan(450 − ϕ m ) = BC tan(450 + ϕ m )
1− tanϕm 1+ tanϕm AC = BC 1+ tanϕm 1− tanϕm
2009-10-28
1− tanϕm BC =± 1+ tanϕm AC
< 450 +
tan ϕm1 ≈ 0.224
20
三力汇交有: 0 < ϕm
M F
C
M1
B
F1
A
应用二力平衡原理(二力构件)
10
2009-10-28
BUAA
题14:确定支座A的约束力方向(不计构件自重和所有摩擦)
C A
M1
C B
M2
M1
B
A
M1 > M 2
2009-10-28
11
BUAA
题15:确定支座A的约束力方向。不计构件自重和所有摩擦
A
M
M
O
B
2009-10-28
结论:L 轴与 OZ 轴为异面直线
2009-10-28
5
BUAA
题9:四面体上作用有一空间任意力系,对该四面体六根轴 的取矩方程成立是否是平衡的充分条件。
MO
FR
l1
o
l2
⎧ ∑ M l1 = 0 ⎪ ⎨∑ M l2 = 0 ⎪ M =0 ⎩ ∑ l3
Mo = 0
⎧ ∑ M l4 = 0 {F1 , F2 , L , Fn } = {FR , M o } ⎪ ⎨ ∑ M l5 = 0 平衡条件: FR = 0 M o = 0 ⎪ ⎩ ∑ M l6 = 0
+ bf + c = 0
f2 > 1
若取
2009-10-28
FN 1 < 0
19
BUAA
方法二 d D O A
ϕm ϕm
M d= = 3.75cm P AC = R cos450 + d
BC = R cos450 − d
CD tan(45 − ϕ m ) = AC CD tan(450 + ϕ m ) = BC
2009-10-28
a
FB
25
BUAA
O
题26: 下图中的系统是否是静定结构?
B
D
B
D
C A G
2009-10-28
C E 瞬态机构 A G 静定结构 E
26
BUAA
题27: 下图中的系统是否是静定结构?
F
A
题28: 确定上图结构中铰链B约束力的方向
2009-10-28
B
27
BUAA
题29:确定杆1和杆2是受拉力还是受压力
BUAA
a
A
a
WA
O
题24:已知 WA, a,b,f。 求平衡时, WBmax
b
WB
21
2009-10-28
BUAA
a
A
a
WA
O
FN
b O
FOy
WB
F
解:1、研究圆盘
FO x W R − FR = 0 B
∑M
O
=0
F Ay
A
F = WB
2、研究板
FAx
F
WA
FN
WB (1 − f
∑M
b ) ≤ fWA a
D
B
FCx FGH
H
31
FB
BUAA
解: 1、研究整体
FAy
A
E
C
D
B
∑M
A
= 0 → FB
FAx
1 G
M
P
H B
2、研究分离体
FB
∑M = 0 → F ∑F = 0 → F ∑F = 0 → F
C x y
GH
FCy C
D
Cx Cy
FCx FGH
H
FB
F1
FGA
G FGH
3、研究销钉G
F1 = FGH
12
BUAA
题16:确定铰链A、B处约束力的方向 (不计构件自重和所有摩擦)。
先研究AD杆
A
D
F
再研究整体 B
L 2009-10-28 L L
C
13
BUAA
题17:确定支座A、B处约束力的方向 G E E C E G
M
D
H
M
C C
FB
D B
A A B
A
FA
应用:三力平衡定理、力偶的性质、刚化原理
i =1
i =1
两个力系等效条件: 两个力系的主矢相等、主矩也相等
2
2009-10-28
BUAA
题1: 空间平行力系简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题2: 一对平行不共线的力简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题3: 两个平面汇交力系构成的平面力系简化的最简结果 可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题4: 图中的两个力构成的力系简 化的最简结果可能是: A:平衡力系、B:力偶、 C:合力、