变位齿轮传动
变位齿轮中变为传动的高度变位和角变位

变位齿轮中变为传动的高度变位和角变位【摘要】变位齿轮是一种重要的传动装置,通过其结构中的高度变位和角变位实现传动的功能。
高度变位是指齿轮轴心之间的距离随着旋转变化,而角变位则是指齿轮轴线之间的夹角随着旋转变化。
这两种变位方式共同作用于传动系统中,实现了传动装置的灵活性和精准度。
高度和角变位的应用广泛,包括汽车变速箱、机器人等领域。
相较于其他传动装置,变位齿轮具有结构简单、传动平稳、传动效率高等优点。
变位齿轮在工业生产中具有重要的应用价值。
变位齿轮通过高度和角变位的方式实现传动功能,广泛应用于各个领域,为工业生产提供了便利和效率。
【关键词】变位齿轮、传动、高度变位、角变位、结构、原理、应用、优点、总结1. 引言1.1 引言变位齿轮是一种常用的传动元件,具有高度变位和角变位的特性。
高度变位是指齿轮轮齿的变化,而角变位则是指齿轮轴线的变化。
这种变位设计可以实现齿轮传动的平稳性和可靠性。
在实际应用中,高度和角变位的组合可以满足不同的传动需求,提高传动效率和传动精度。
本文将从变位齿轮的结构、高度变位原理、角变位原理、高度和角变位的应用以及变位齿轮的优点等方面进行探讨。
通过对这些内容的分析和讨论,可以更好地理解变位齿轮的工作原理和应用特点。
在工程设计和制造中,变位齿轮起着重要的作用,可以实现复杂传动系统的正常运转。
通过本文的介绍,希望读者能够对变位齿轮的相关知识有更深入的了解,为工程实践提供参考和指导。
2. 正文2.1 变位齿轮的结构变位齿轮是一种特殊的齿轮机构,其结构与普通直齿轮不同。
在变位齿轮中,齿数和模数不等的两个齿轮啮合,使得齿轮轴线的相交点在啮合中心线之上或之下,这就是变位齿轮特有的压力角变化的结构特点。
变位齿轮的结构包括两个部分:主动轮和被动轮。
主动轮齿数多,模数小,被动轮齿数少,模数大。
两者之间通过啮合连接,实现了高度和角度的变位传动。
主动轮和被动轮之间的啮合能够传递动力并实现传动的效果。
在变位齿轮的结构中,齿轮的牙廓形状也是非常重要的。
变位齿轮传动类型

变位齿轮传动类型
变位齿轮传动是一种常见的机械传动方式,它通过变位齿轮的转动来实现传递动力和转矩的目的。
变位齿轮传动可以分为内啮合和外啮合两种类型,下面将详细介绍这两种类型的特点和应用。
一、内啮合变位齿轮传动
内啮合变位齿轮传动是指变位齿轮的啮合齿轮是内齿轮,也就是说,变位齿轮的齿轮齿数比啮合齿轮的齿轮齿数小。
内啮合变位齿轮传动具有以下特点:
1.传动效率高:内啮合变位齿轮传动的传动效率比外啮合变位齿轮传动高,因为内啮合齿轮的齿数较少,摩擦损失较小。
2.结构紧凑:内啮合变位齿轮传动的结构比较紧凑,适用于空间有限的场合。
3.噪音小:内啮合变位齿轮传动的噪音比外啮合变位齿轮传动小,因为内啮合齿轮的齿数较少,啮合时的冲击力较小。
内啮合变位齿轮传动广泛应用于各种机械设备中,如工程机械、农业
机械、纺织机械等。
二、外啮合变位齿轮传动
外啮合变位齿轮传动是指变位齿轮的啮合齿轮是外齿轮,也就是说,
变位齿轮的齿轮齿数比啮合齿轮的齿轮齿数大。
外啮合变位齿轮传动
具有以下特点:
1.传动扭矩大:外啮合变位齿轮传动的传动扭矩比内啮合变位齿轮传动大,因为外啮合齿轮的齿数较多,承载能力较强。
2.结构简单:外啮合变位齿轮传动的结构比较简单,易于制造和维修。
3.适用范围广:外啮合变位齿轮传动适用于各种传动比较大的场合,如汽车变速箱、船舶传动等。
总之,变位齿轮传动是一种常见的机械传动方式,它具有传动效率高、结构紧凑、噪音小等优点,广泛应用于各种机械设备中。
在选择变位
齿轮传动时,应根据具体的传动要求和工作环境来选择内啮合或外啮
合类型。
机械设计(6.14.1)--变位齿轮传动的强度计算
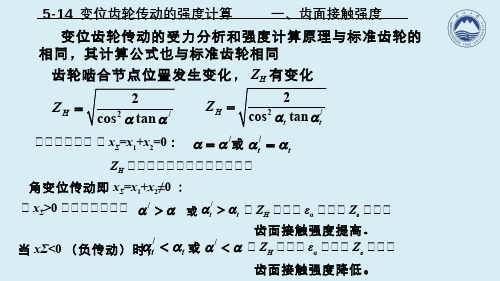
变位齿轮传动的受力分析和强度计算原理与标准齿轮的相同,其计算公式也与标准齿轮相同
齿轮啮合节点位置发生变化,Z H 有变化
2/
2cos tan H Z a a =2/2cos tan H t t Z a a =/a a =/t t a a =高高高高高高 高x Σ=x 1+x 2=0:
Z H 高高高高高高高高高高高高高
或/a a >/t t a a >/a a </t t
a a <高x Σ>0高高高高高高高高Z H 高高高εα高高高Z ε高高高
高Z H 高高高εα高高高Z ε高高高或齿面接触强度提高。
当xΣ<0(负传动)时,或齿面接触强度降低。
角变位传动即x Σ=x 1+x 2≠0 :
二、齿根弯曲强度齿根弯曲强度:
变位使齿形变化,齿根厚度和齿根圆角半径变化,引起计算系数Y Fa 和Y sa 的变化,影响齿根弯曲强度。
正变位齿轮的齿厚增大,Y Fa 减小,
齿根圆角半径减小,Y sa 增大。
正变位齿轮的齿根弯曲强度可有提高。
负变位使齿根弯曲强度降低。
变位使端面重合度系数εa 变化,Y ε也发生变化。
机械原理高级篇4章_变位齿轮传动
r2'
o2
'
2.中心距
•一对齿轮啮合传动时, 中心距等于两节圆半径 之和。 •一对无侧隙标准齿轮传 动,其分度圆与节圆重 合,啮合角等于分度圆 压力角 •标准中心距(标准齿轮 无侧隙传动中心距)
' 1 ' 2
o1
' r1
c
r2'
' 1
s e s e
' 2
o2
m 2 r ar ( z1 z2 ) 1 r 1 r 2 2
上的齿距为pi,则 该比值称为模数
di
mi
• 模数—— 人为地把 pi / 规定为一些简单的有理数,
pi
z
一个齿轮在不同直径的圆周上,其模数的大小是不同的。
p i 。
• 分度圆——— 是齿轮上一个人为地约定的轮齿计 算的基准圆,规定分度圆上的模数和压力角为标准值。
国标压力角的标准值为=20° 模数的标准系列见GB1357-87,参见表4-2。 分度圆上的参数分别用d、r、m、p、e及表示。 m越大,P愈大,轮齿愈大,抗弯强度也愈高。
• 齿轮插刀
切削运动
进给运动
范成运动 范成运动
用齿条刀具加工齿轮
用标准齿条刀具加工标准齿轮必须使刀具 的分度线与被加工齿轮的分度圆相切并作纯滚 动。
标准齿条刀的齿廓,它与齿条的齿廓基本 相同,只是齿顶增加了c*m的高度。在齿条刀 中线上的齿厚与齿距之比等于0.5(即齿厚等于 齿槽宽)。与以半径为ρ的圆弧相切并平行于齿 条刀中线的直线刀刃称为刀顶线,它是用于切 制被切齿轮齿根圆的。半径为ρ的圆角刀刃,是 切出齿根部分非渐开线的过渡曲线。
切制圆柱外齿轮轮齿时,齿条刀是逐渐切 入齿轮坯的,切入的终点位置不同,切出 的齿轮轮齿尺寸就不同。
变位齿轮传动

正角度变位齿轮传动 负角度变位齿轮传动
3、高度变位齿轮传动
分析: a’=a,d’=d,α ’=α ,X1+X2=0 X1=X2=0,标准齿轮传动 X1=-X2≠0,高度变位齿轮传动 说明: (1)标准齿轮传动可以看成是高度变位齿轮传动的一 种特例
(2)高度变位齿轮传动时,两齿轮的啮合线 和节点 位置不变,节 圆 与分度圆 重合,啮合角 等于压力角。 (3)高变位齿轮传动与标准齿轮传动相比,主要是分度圆上的 齿厚、齿槽宽、齿顶高 与齿根高 发生了变化,而齿高 等则不变。 (4)采用高变位齿轮传动,通常小齿轮 采用正变位,大齿轮 采 用 负变位,且两变位系数大小相等,符号相反。(x1>0,X2<0)
一、变位齿轮的局限性
1、用范成法加工标准齿轮,当齿数过少时,会产
生根切缺陷;
2、一对相互啮合的标准齿轮,大小齿 轮的强度和寿命不一致;
3、标准齿轮不适用于非标准中心距的场合; 4、标准齿轮磨损后,不能再按标准齿轮的 要求进行修复。
10.7 变位齿轮传动
变位齿轮的概念
二、变位齿轮的加工
三、变位齿轮的有关概念 1、径向变位量:
:径向变位系数 >0,正变位齿轮 =0, 标准齿轮 <0,负变位齿轮
正变位齿轮 标准齿轮 负变位齿轮
分度圆
2、变位齿轮类型的判断
刀具由轮坯中心向外移 刀具中线与轮坯分度圆相离
s=e
正变位齿轮
刀具中线与轮坯分度圆相切
刀具由轮坯中心向内移
s>e
标准齿轮
刀具中线与轮坯分度圆相交
s<e
负变位齿轮
四、变位齿轮特点及变化
(
变位齿轮详解(精品)

a a ym
a″
ym (x1 x2 )m ym
(X1+ X2)m a′ ym
y x1 x2 y
O2
O2
△y为齿顶降低系数 ,
其值恒大于零。
h (2ha* c* y)m
ha (ha* X y)m
hf (ha* c* x)m 变位齿轮齿高比标准齿轮少 ym
2 无侧隙啮合方程
O1
xmtgα
a
b
rb
xm
s’ 分度圆 基圆
刀具节线 刀具分度线
ab c
P 设计:潘存云
S=πm/2
N1 α B2
xm
α
c
h* a
m
xm xm
xmtg
xm
h* a
m
xm
N
p
xm
正变位齿轮 x>0
标准齿轮 x=0
负变位齿轮 x<0
ha hf
z 17 正变位提高强度
凑中心距
• 变位后
s m 2xmtg
2
e m 2xmtg
2
1。变位齿轮的加工方法,模 数,压力角,分度圆,基圆都 与标准齿轮一样。
2。几何尺寸有所变化。
3。中心距一般不是两分度圆 半径之和,除非它们分别等值 正,负变化。
a=m(z1+z2)/2
a, a=m(z1+z2)/2
齿条与齿的切点变化, 齿间出现侧隙
x1 m
c* m c* m
好的传动形式
4)两轮齿数不受 Z1 Z2 2Zmin 的限制。
5)正传动的重叠系数有所下降。
O
r1 r1
O
1rb1
B2 N1
r1
变位齿轮传动

变位齿轮传动}(..等'' II卞奋朴孕技术联盟t' 1959年设"L户if性研究委员会.1960年成L f "P W性及质狱控制专门小:'It. If于197一年在n4-fl开一第一)111 ,11称性学术讨沦会F1本将i I I f性壮tffl·广r川到K-NI I-AY部门取得很人成功.大大地提高一‟It产Iii:的…II锥瓜,使JtRA III 靠性产品,例如扩…车、彩电、照相14L…收录机、电冰箱等.杨销到全世界.带来巨大的经济效益。
英闲于一,62年出版i(可祥性Ii微电i-学》《Rrliabilit. 1nd %lirnwlmtn)f,il· s)杂.态法州ICI 立通讯研究所也存1962年成;: f`nf靠性中心”.进11数据的收集与分析,并F 1963年出版J‟( III 7I'性》杂志、.NNINC'L f技术委T'会(IF.(二)J 1965年设}'c户II Yr性技术委员会.1977年又改名为.!fSf性与可维修性技术委ft会它对可命性方面的定义川语. 1ST)方法、可弃性竹理、数据收塑苏.进行了iii际间的协fled i'.作我1*14.1可靠性科学的研究与应川I.作1'以了高度+(K 19H6年I月25 11原机械1- 业部发布的(关于加强机电产0011可靠件下作的晒知》加速(4I Iq机.t!产品可靠性工作的推广和应川:9411年,原机械电子「业部印发的一加强机电产品设计!作的规定“中u}1确指出:叮克性、适应性、经济性哭件统筹作为4kNl1L电产品没计的原则如今.可靠性的观点lit方法L'成为质ht保id ,安全性保证、产品ii {l防预等不可缺少的依据和手段.也是我国I { `"技术人员掌捉现代设计方法听必须掌捉的重要内容之上式表明。
变位齿轮公式

变位齿轮公式变位齿轮传动的设计步骤设计变位齿轮时,根据不同的已知条件,可采用不同的设计步骤。
(1)已知z1、z2、m、α、ha*和c*时,其设计步骤为:1)选择传动类型,若z1+z2 < 2zmin,必须采用正传动,否则可考虑其它传动类型;2)选择两齿轮的变位系数;3)计算两齿轮的几何尺寸;4)验算重合度及轮齿强度。
(2)已知z1、z2、m、a'、α、ha*和c*时,其设计步骤为:1)计算啮合角α'cosα'=(a/a')cosα2)选择两齿轮的变位系数invα'=2tgα(x1+x2)/(z1+z2) + invαx1+x2=(z1+z2)(invα'-invα)/2tgαx1≥ha*(zmin-z)/zmin,x2≥ha*(zmin-z)/zmin3)计算两齿轮的几何尺寸4)验算重合度及轮齿强度(3)已知i、m、a'、α、ha*和c*时,其设计步骤为:1)确定两齿轮的齿数因a'=acosα/cosα'=[m(z1+z2)/2]cosα/cosα'=[mz1(1+i)/2]cosα/cosα' 故z1≈2a'/(i+1)m 取整数,z2=iz1 取整数。
思考题:1)某机器中的一对外啮合标准圆柱直齿轮,小齿轮轮齿严重磨损,拟报废,大齿轮轮齿磨损较轻,拟修复。
试问采用什么方法可使传动能恢复使用?2)图示为一单联滑移齿轮机构,已知基本参数为m=3mm,z1=18,z2=30,z3=27。
试问有几种设计方案?哪种方案较好?3)吊车行走机构中有一对标准直齿轮传动,已知z1=13,z2=47,m=3mm,齿轮1因根切经常断齿。
试问采用什么方案来解决这个问题?例用齿条插刀加工一个直齿圆柱齿轮。
已知被加工齿轮轮坯的角速度ω1=5 rad/s,刀具的移动速度为0.375m/s,刀具的模数m=10mm,压力角α=200。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安徽工程科技学院专用
作者: 潘存云教授
* * x )m ha ha m xm m (ha
齿顶高为:
除了 x1+ x2=0之外,总有 x1+ x2> y,即ς> 0,
轮齿总要削顶。
安徽工程科技学院专用
作者: 潘存云教授
3. 变位齿轮传动的类型 零传动 x1+x2=0 标准齿轮传动x1=x2=0 等变位齿轮传动x1=-x2≠0 不等变位齿轮传动 或角度变位。
安徽工程科技学院专用
作者: 潘存云教授
二、已知变位系数的设计 已知条件是:z1、z2、m、x1、x2,其设计步骤如下: 1)计算啮合角: invα’= 2tgα(x1+ x2)/( z1+ z2)+ invα 2)确定中心距: a’=acosα/ cosα’ 3)确定y和ς: y=(a’-a)/m, ς=x1+ x2-y 4)计算两轮的几何尺寸。
1 2 1 2
安徽工程科技学院专用
作者: 潘存云教授
可以证明:只要x1+ x2≠0 则 x1+ x2>y ,即 a'' >a'。 无侧隙和标准顶隙两个要求不能同时得到满足。 解决办法:将轮齿削顶。
m a " a ' ( x1 x2 )m ym
得:
=( x1 x2 ) y 0 --称为齿顶高变动系数
安徽工程科a*(zmin-z1)/zmin x2≥ha*(zmin-z2)/zmin
两式相加,设ha*=1,则有: x1 +x2≥[2zmin-( z1+ z2)]/zmin ∵ x1+ x2=0 ∴ z1+ z2≥2zmin 优缺点:
①可采用z1≤zmin的小齿轮,仍不根切,使结构更紧凑。 ②改善小齿轮的磨损情况。 ③相对提高承载能力,因大小齿轮强度趋于接近。 ④缺点:没有互换性,必须成对使用,ε
a" ra1 c rf 2 r1 ha1 c r2 h f 2
r1 r2 (h x1 )m c m (h c x2 )m
* a * * a *
m( z1 z2 ) / 2 ( x1 x2 )m
构造函数f(α’)= x + x –y 如果无侧隙和标准顶隙同时满足,则应使: 则当α’=α时有极小值 x + x =y a'=a'' 即:y=x1+x2
作者: 潘存云教授
3)齿厚与齿槽宽与标准齿轮不同 齿厚: s=πm/2 + 2xmtgα 齿槽宽:e=πm/2 - 2xmtgα 正变位:齿厚变宽,齿槽宽减薄。
变位后与轮坯分度圆相切的不是刀具的分度线, 而是刀具节线,刀具节线上的齿厚减小、齿槽 宽增大,则轮坯分度圆上的齿厚将增大。
xmtgα O1 xm a b
安徽工程科技学院专用 作者: 潘存云教授
一、加工齿轮时刀具的移位
从避免根切引入
为避免根切,可径向移动刀具 xm ----移距 x-----为移距系数。 规定: 远离轮坯中心时,x>0,
正变位齿轮。
刀具中线
α
N1
作者:潘存云教授
xm
B2
αB2
xm
靠近轮坯中心时,x <0,
负变位齿轮。
安徽工程科技学院专用
§9-9 变位齿轮概述
标准齿轮的优点: 计算简单、互换性好。
缺点:
①当z<zmin时,产生根切。但实际生产中经常要用到
z<zmin的齿轮。
②不适合 a’≠a的场合。a’<a 时,不能安装。当a’>a
时,产生过大侧隙,且ε ↓
③小齿轮容易坏。原因:ρ小,滑动系数大,齿根 薄。希望两者寿命接 近。
为改善上述不足,就必须对齿轮进行变位修正。
安徽工程科技学院专用 作者: 潘存云教授
设
cos m( z1 z2 ) cos ym a a a a ( 1) ' ' cos 2 cos
'
z1 z2 cos y ( 1)-中心距变动系数 ' 2 cos
无侧隙啮合时有: a ' a ym m( z1 z2 ) / 2 ym 为了保证两齿轮之间具有标准的顶隙: c=c*m,则两轮 的中心距为:
本节讨论变位齿轮的 啮合传动与设计问题
α≥[ε α]
s'2= s2r'2 / r2 -2 r'2 (invα'-invα)
式中: s1=m(π/2+2x1 tgα) s2=m(π/2+2x2 tgα) = cosα/ cosα’ i =1,2
又 r'i / ri =( rbi /cosα') / (rb i /cosα)
变位齿轮 传动类型
正传动 x1+x2>0
负传动 x1+x2<0
1. x1+ x2=0,且x1=x2=0
标准齿轮传动(变位齿轮传动的特例) 2. x1+ x2=0,且x1=-x2≠0 等变位齿轮传动(高度变位齿轮传动) 有:a’=a y=0
ς=0 α’=α r’=r
作者: 潘存云教授
小齿轮采用正变位,x1>0,大齿轮采用负变位,x2<0
正变位齿轮 x>0 标准齿轮 x=0 负变位齿轮 x<0
ha hf
作者:潘存云教授
分度圆
安徽工程科技学院专用
2)变位齿轮的齿顶高和齿根高与标准齿轮不同 齿根高: hf= ha*m+c*m-xm 齿顶高:由毛坯大小确定,若保证全齿高不变,则有: ha= (ha*+x)m 顶圆半径:ra =r+ ha =r+(ha*+x)m
或:
p s1 2r1(inv inv ' ) s2 2r2 (inv inv ' )
m( / 2 2 x2tg ) z2m(inv inv ' )
即: m m( / 2 2 x1tg ) z1m(inv inv ' )
简化得: 2mtg ( x1 x2 ) m( z1 z2 )(inv inv ' ) 0
'
inv 2tg ( x1 x2 ) /( z1 z2 ) inv
上式称无侧隙啮合方程。 分析:若 x1+ x2≠0,则 α’≠α 由 a’cosα’ =acosα 知: a’≠a 即分度圆与节圆不重合,两分度圆分离或相交。
安徽工程科技学院专用 作者: 潘存云教授
代入 p '= s'1+ s'2 得:
cos cos cos cos cos ' ' p s 2 r ( inv inv ) s 2 r ( inv inv ) 1 1 2 2 ' ' ' ' ' cos cos cos cos cos
a’<a
y<0 ς>0 α’ <α
r’ <r 齿高降低ςm。
优缺点:与正传动相反。仅用于配凑中心距的场合。
安徽工程科技学院专用 作者: 潘存云教授
4.变位齿轮传动的设计步骤 一、已知中心距的设计 已知条件是:z1、z2、m、 a’ ,其设计步骤如下: 1)计算啮合角:α’=arccos(acosα/ a’) 2)确定变位系数之和: x1+ x2=(invα’-invα)( z1+ z2)/2tgα 3)确定中心距变动系数: y=(a’-a)/m 4)确定齿顶高变动系数: ς=(x1+ x2) -y 5)分配变位系数。 6)按表10-4(P327)计算两轮的几何尺寸。
负变位:正好相反。
α
rb 采用变位修正法加工变位 c 齿轮,不仅可以避免根切, s’ 分度圆 基圆 而且与标准齿轮相比,齿 B2 作者:潘存云教授 N1 α 厚等参数发生了变化,因 刀具节线 P a b c 而,可以用这种方法来提 xm 刀具分度线 高齿轮的弯曲强度,以改 S=πm/2 善齿轮的传动质量。且加工所
作者: 潘存云教授
二、最小变位系数xmin 当 z<zmin 时,为避免根切,刀具的 齿顶线应移到N1或以下的位置:
O1
N1Q≥ha*m-xm
xm
α
r
作者:潘存云教授
或
xm≥ha
*m-
N1Q
xminm
∵ N1Q =N1 Psinα =rsinαsinα =mzsin2α/2 ∴ x≥ha*- zsin2α/2 由 zmin=2 ha*/ sin2α 有:
安徽工程科技学院专用
α略有减小。
作者: 潘存云教授
3. x1+x2≠0 不等变位齿轮传动(角度变位齿轮传动) 当 x1+ x2 >0 称正传动,当 x1+ x2 <0 称负传动。
a)正传动时有: a’ >a y>0 ς>0 α’>α 优点: r’ >r 齿高降低ςm
可以采用z1+ z2<2zmin 而不根切,结构紧凑。其余同上。 缺点:没有互换性,须成对使用,因齿顶降低使ε α↓ b)负传动时有:
用刀具与标准齿轮的一样,所以 变位齿轮在各类机 械中获得了广泛地应用。
安徽工程科技学院专用 作者: 潘存云教授
§9-10 变位齿轮传动
1.正确啮合条件和连续传动条件 与标准齿轮相同,即:m1=m2 ,α1=α2 ,ε 2.中心距与啮合角 无侧隙啮合时: s'1=e'2 ,s'2= e'1 故有:p'= s'1+ e'1 = s'2 + e'2 = s'1+ s'2 由任意圆齿厚公式得: s'1= s1r'1 / r1 -2 r'1 (invα'-invα)