路阻函数参数值标定
流阻检测标定标准

流阻检测标定标准流阻检测标定是一种常见的测量方法,常用于流体力学的研究和工程应用中。
本文将从基本原理、标定步骤、标定参数和影响因素等方面进行详细介绍。
一、基本原理:流阻是指流体在管道或孔隙中流动时,所受到的阻力大小。
在流阻检测中,通过测量流体在流动过程中的压力差和流量,可以进一步计算出流阻的数值。
流阻的数值通常用流阻系数来表征,即根据实验数据计算出的关于流体流动特性的无量纲参数。
二、标定步骤:1. 准备标定设备和流量控制装置,如压力传感器、流量计等;2. 确定标定装置的供液系统和排液系统,以保证流体实验的稳定性和准确性;3. 设置实验参数,如供液速度、流量范围、压力采样点等;4. 进行标定试验,记录流量和压力数据,并保持连续稳定的供液状态;5. 确定流阻系数的计算方法,进行数据处理和计算;6. 验证标定结果的准确性和可靠性,检查误差范围。
三、标定参数:在流阻检测中,一般需关注以下几个主要参数:1. 进口和出口压力:只有通过测量压力差,才能计算出流体在流动过程中所受到的阻力大小;2. 流量速度:测量流体在管道或孔隙中流经的速度,以了解流体的流动特性;3. 流量:通过流量计等仪器,测量在单位时间内流经的液体体积,以计算流量。
四、影响因素:在进行流阻检测标定时,还需要考虑一些影响因素,以保证标定结果的准确性和可靠性。
1. 流体性质:不同流体的粘度、密度等物性参数会对流阻造成影响,需要在标定中进行考虑和校正;2. 管道形状和尺寸:管道的直径、长度和形状等因素会对流动的阻力大小产生影响,需要进行修正;3. 流体温度:流体的温度变化会影响流体的物性参数和流体的粘度,从而对流阻系数的计算造成影响;4. 流速范围和流动状况:流速范围的选择和流动状况的稳定性,直接影响到标定结果的准确性。
综上所述,流阻检测标定是一个涉及多个方面的复杂过程,包括基本原理的了解、标定步骤的规范、标定参数的选择和影响因素的考虑等。
只有在严格按照标定标准进行操作,并综合考虑各种因素的影响,才能得到准确可靠的流阻标定结果。
道路限制参数的标定

道路限制参数的标定一、道路限制参数的标定概述道路限制参数的标定是指通过对道路线形、交通设施、交通流量等要素进行测量、分析和计算,确定道路的设计参数和运行状态,以保证道路的安全、畅通和高效。
道路限制参数主要包括道路几何参数、交通控制参数和交通运行参数等。
标定工作对于道路设计、施工和运营管理具有重要意义。
二、道路限制参数的标定方法1.传统标定方法传统标定方法主要依靠人工现场测量和计算,如直角坐标法、切线长法等。
这些方法操作简便,但工作效率较低,且容易受人为因素和环境条件的影响,导致标定结果具有一定的误差。
2.现代标定方法现代标定方法主要采用先进的技术和设备,如全站仪、激光扫描仪、无人机等,实现道路限制参数的高精度、高效标定。
现代标定方法具有以下优点:(1)数据采集速度快、精度高,能够满足大规模道路工程的标定需求;(2)减少人为因素的影响,提高标定结果的可靠性;(3)可通过数据处理和分析,为交通规划和管理提供科学依据。
三、道路限制参数的标定应用1.交通规划与管理道路限制参数的标定成果可用于交通规划与管理,如道路设计、交通组织、交通信号控制等。
通过对道路限制参数的合理设置,可以提高道路通行能力、降低交通事故率、缓解交通拥堵等问题。
2.智能交通系统道路限制参数的标定成果可为智能交通系统提供数据支持。
智能交通系统通过集成多种技术手段,实现道路交通的智能化管理,如实时监控交通流量、预测交通状况、优化交通信号控制等。
四、道路限制参数的标定发展趋势1.自动化、智能化发展随着计算机技术、传感器技术、大数据技术的不断发展,道路限制参数的标定将向自动化、智能化方向发展,提高标定效率和精度。
2.跨学科、集成化发展道路限制参数的标定将与其他学科领域(如土木工程、电子信息工程等)相结合,实现跨学科、集成化发展,为交通事业提供全面的技术支持。
3.绿色低碳发展道路限制参数的标定将更加注重环保和可持续发展,通过优化道路设计、提高交通运行效率,降低对环境的影响。
道路限制参数的标定

道路限制参数的标定
【最新版】
目录
1.道路限制参数的标定概述
2.道路限制参数的标定的方法和步骤
3.道路限制参数的标定的重要性
正文
【道路限制参数的标定概述】
道路限制参数的标定是指根据道路的特点和交通规则,设定合理的道路限制参数,这些参数可以包括限速、限重、限高、限宽等。
这些限制参数对于保障道路交通安全、维护交通秩序和保护道路基础设施具有重要的作用。
【道路限制参数的标定的方法和步骤】
道路限制参数的标定需要经过以下几个步骤:
1.收集道路信息:包括道路的长度、宽度、坡度、曲率、路面状况等,这些信息可以通过现场勘察、测量和调查获取。
2.分析交通状况:根据道路的功能和使用需求,分析道路的交通流量、流向、速度等,了解道路的运行状况和交通特性。
3.设定限制参数:根据道路的信息和交通状况,设定合理的道路限制参数,如限速、限重、限高、限宽等。
4.设置标志标线:在道路上设置明确的标志和标线,让驾驶员清楚地了解道路的限制参数,引导驾驶员遵守交通规则。
【道路限制参数的标定的重要性】
道路限制参数的标定对于保障道路交通安全、维护交通秩序和保护道
路基础设施具有重要的作用。
合理的道路限制参数可以有效地防止交通事故的发生,提高道路的运行效率,延长道路的使用寿命。
路阻函数参数值标定
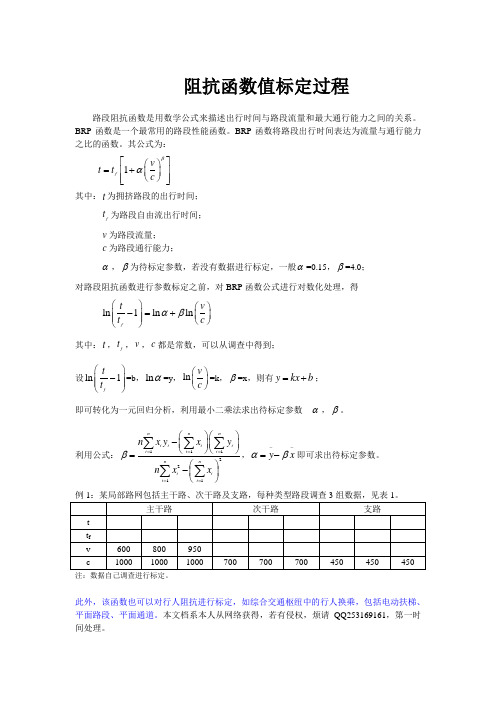
阻抗函数值标定过程路段阻抗函数是用数学公式来描述出行时间与路段流量和最大通行能力之间的关系。
BRP 函数是一个最常用的路段性能函数。
BRP 函数将路段出行时间表达为流量与通行能力之比的函数。
其公式为:1f v t t c βα⎡⎤⎛⎫=+⎢⎥ ⎪⎝⎭⎢⎥⎣⎦其中:t 为拥挤路段的出行时间; f t 为路段自由流出行时间; v 为路段流量;c 为路段通行能力;α,β为待标定参数,若没有数据进行标定,一般α=0.15,β=4.0;对路段阻抗函数进行参数标定之前,对BRP 函数公式进行对数化处理,得ln 1ln ln f t v t c αβ⎛⎫⎛⎫-=+ ⎪ ⎪ ⎪⎝⎭⎝⎭其中:t ,f t ,v ,c 都是常数,可以从调查中得到;设ln 1f t t ⎛⎫- ⎪ ⎪⎝⎭=b ,ln α=y ,ln v c ⎛⎫⎪⎝⎭=k ,β=x ,则有y kx b =+;即可转化为一元回归分析,利用最小二乘法求出待标定参数α,β。
利用公式:1112211nn n i i i i i i i n ni i i i n x y x y n x x β=====⎛⎫⎛⎫- ⎪⎪⎝⎭⎝⎭=⎛⎫- ⎪⎝⎭∑∑∑∑∑,y x αβ--=-即可求出待标定参数。
例1:某局部路网包括主干路、次干路及支路,每种类型路段调查3组数据,见表1。
注:数据自己调查进行标定。
此外,该函数也可以对行人阻抗进行标定,如综合交通枢纽中的行人换乘,包括电动扶梯、平面路段、平面通道。
本文档系本人从网络获得,若有侵权,烦请QQ253169161,第一时间处理。
基于正交试验法的单个信号交叉口仿真参数标定_于泉
X19
20
A4
B5
C3
D1
E4
F2
X20
21
A5
B1
C5
D4
E
C1
D5
E4
F3
X22
23
A5
B3
C2
D1
E5
F4
X23
24
A5
B4
C3
D2
E1
F5
X24
25
A5
B5
C4
D3
E2
F1
X25
( 4) 列出试验方案及试验结果。 按照上表中的排列次序填入相应的各因素各水 平值,即完成试验方案设计,此时每个试验方案都 由不同的参数水平组合,利用评价指标将每个试验 运行的结果进行评价,评价结果填入上表中最后一 列,Xi 代表每个试验相应的评价结果,在本试验中 Xi 为 4 个进口道平均排队长度误差的平均值。 ( 5) 对正交试验设计结果进行极差分析。 通过对试验结果的极差分析,可以得出同因素 不同水平值对试验指标的影响程度以及各因素对评 价指标影响程度的主次顺序,进而确定最优因素水 平组合。试验结果分析如表 2 所示。
本文选取简单易用的正交试验算法选取6个常用的驾驶员参数进行标定并提出一套基于正交试验的参数标定流程选取visiim仿真模型作为应用平台将提出的参数标定方法应用于北京市南中轴的单个交叉口仿真模型中通过对比仿真值与现状值的误差验证模型的有效性
第 29 卷 增刊 2012 年 7 月
公路交通科技 Journal of Highway and Transportation Research and Development
( 6) 等待换道消失时间: 车辆在停车线前等待 换道直到消失的最大时间 ( 发生在主动型车道变换 中) 。当车辆达到等待换道消失时间后,车辆就会从 仿真 网 络 中 消 失。模 型 缺 省 值 是 60 s,取 值 范 围 为30 ~ 90 s。
交通规划要点总结
第一章:1.交通规划概念:所谓交通规划,是指根据特定交通系统的现状与特征,用科学的方法预测交通系统交通需求的发展趋势及交通需求发展对交通系统交通供给的要求,确定特定时期交通供给的建设任务、建设规模及交通系统的管理模式、控制方法,以达到交通系统交通需求与交通供给之间的平衡,实现交通系统的安全、畅通、节能、环保的目的。
2.交通规划原则: 1)交通系统建设服务于经济发展原则2)综合运输协调发展原则3)局部服从整体原则4)近期与远期相结合原则5)需要和可能相结合原则6)理论与实践相结合原则3.交通规划指导思想:交通规划的指导思想因交通规划类型、层次不同及规划区域不同而不同,没有统一的标准,应结合当地实际情况制定。
但一般来说,在制定交通规划的指导思想时应考虑以下要求。
1)要有战略高度2)要有全局观点3)体现可持续发展理念4)符合经济发展要求4.交通规划的期限:交通规划一般分近期、中期、远期三个阶段。
(1)近期以距基准年1-5年为宜,最长不超过10年;(2)中期以距基准年5-15年为宜,最长不超过20年;(3)远期距基准年15-30年为宜,最长不超过50年。
第二章:1.交通调查的内容:道路交通规划可分为城市道路交通规划和区域公路交通规划两大类,相应的调查内容有所不同,但具体的调查内容都可以划分为基础资料、交通需求、交通设施、交通现状四大项。
2.交通调查专业术语:(1)出行:出行指人、车、货为完成某一目的(如上班、上学、购物等)从起点到讫点的全过程。
出行“起点”指一次出行的出发点,即o点;出行“讫点”指一次出行的目的地,即D点。
起讫点都在调查区内的出行称为境内出行,起讫点在调查区外的出行称为过境出行。
起讫点在同一交通区的出行叫做区内出行,起讫点分别位于不同的交通区的出行叫做区间出行。
(2)小区形心:指交通区出行端点(发生或吸引)密度分布的重心位置,即交通区交通出行的中心点,不是该交通区的几何中心。
(3)期望线:又称愿望线,为连接各交通区重心间的直线,是交通区之间的最短出行距离,因为反映最短距离而得名,其宽度表示交通区之间出行的次数。
交通仿真软件模型参数标定研究
交通仿真软件模型参数标定研究摘要:近年来,交通仿真软件在交通工程与交通规划领域应用得越来越广泛,但国内目前使用的仿真软件有相当一部分是从国外引进的,其系统开发背景较大程度上基于国外的交通特性,相关参数的设置都是针对当地的交通状况。
因此在实际应用时,需要结合国内的实际情况对系统参数重新标定和校核。
关键词:TransCAD;VISSIM;参数标定Abstract: in recent years, traffic simulation software in traffic engineering and traffic planning application field to be more and more widely, but domestic current use of simulation software has quite part of it was introduced from abroad, the system development background great degree of based on foreign transportation characteristics, related parameters Settings are all aimed at the local traffic condition. So in practical application, combined with the practical situation of the domestic needs of system parameters calibration and check again.Key words: TransCAD; VISSIM; Parameter calibration0引言交通仿真是指用仿真技术来研究交通行为,它是一门对交通流随时间和空间的变化进行跟踪描述的技术。
城市主干道公交专用道设置交通条件研究
存在设置公交专用道的最佳 的公交流量 比例. 2 1基 本 规定 .
将 上 下 游 交 叉 口停 车 线
之 间的范 围作 为基本 路段 ,
—
l 、
— — — — —
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
l 、
— — — 一
行 车方 向
基 本路 段 上 各 区段 的车 流 运 行 状 况 存 在 较 大 差 异 , 要 主 影 响 因素 为 交 叉 口和公 交 站 点 . 将 基 本 路 段 划 分 为 纯 故
L Te z u DI in y u I i— h 。 NG Ja o ’
,
,
S n f n ,HE W e UN Yu —e g i
( . o eeo r sot i , otes U i ri , aj g20 9 C i ; 1 C lg f a pr t n Suhat n esy N n n 106, hn l Tn ao v t i a
局路阻函数模型 ——B R函数 , P 其形式如下 :
T) t1 詈 ( =o 叫 ) g [ ]
式中:() T q —— 当流量 为 q时路段 上 的行 程时 间 ;o r c — 路 段 的可 能通 行能 力 ; — 模 型参 数. — ,— 流 量时 车辆 在路 段 上 的行 驶 时 间 ;
计算各类车辆的速度或路段行驶时间存在不合理性. 鉴于这种不合理性 , 东南大学黄艳君 8 在南京市和
深圳 市交 通 调查 的基 础上 分 车型建 立 了公交 专 用道设 置 前后 的路 阻 函数模 型 .
基于检测器数据的快速路路阻模型标定
第24卷 第12期2007年12月 公 路 交 通 科 技Journal of Highway and T ransportation Research and DevelopmentV ol 124 N o 112 Dec 12007文章编号:1002Ο0268(2007)12Ο0123Ο04收稿日期:2006Ο08Ο01作者简介:廖明军(1974-),男,湖南邵东人,博士研究生,研究方向为智能交通系统理论,交通规划1(m jliao @1631com )基于检测器数据的快速路路阻模型标定廖明军1,2,李克平1,孙 剑1,王凯英2,王 衡1(11同济大学 交通运输工程学院,上海 201804;21北华大学 交通建筑工程学院,吉林 吉林 132013)摘要:针对交通规划中的路阻模型变量的要求,探讨了检测器数据的处理方法以及模型的标定方法。
同时结合交通规划软件中路阻函数模型的要求和形式,参数标定采用了适用于非线性、非二次型逆的修正BFG S 算法的非线性回归方法。
其中,步长一维搜索采用W olfe 准则。
由于非线性问题对样本数据质量非常敏感,同时,提出了对调查(检测器)数据质量检查的方法。
利用上海快速路检测数据进行回归分析,从结果看,该模型对快速路具有很好的适应性,并具有较高的精度。
关键词:交通工程;路阻模型标定;BFG S 非线性回归;快速路中图分类号:U49111+23 文献标识码:ACalibration of Volume Οdelay Model of Expre ssway Using Detector DataLI AO Ming Οjun1,2,LI K e Οping 1,S UN Jian 1,W ANG K ai Οying 2,W ANG Heng1(11School of T ransportation and Engineering ,T ongji University ,Shanghai 201804,China ;21School of T raffic and Civil Engineering ,Beihua University ,Jilin Jilin 132013,China )Abstract :C onsidering variables of v olume Οdelay m odel in traffic planning ,methods of data analysis and the m odel calibration for the m odel are discussed 1According to the type and the requirements of v olume Οdelay m odel ,the non Οlinear regression method ,which is suitable for the non Οlinear ,non Οquadric revertible and m odified BFG S alg orithm is presented 1C onsidering the m odel sensitivity to the quality of data in non Οlinear regression ,the check method of sam ples are put forth 1The results show that the m odel is fairly adaptable and accurate for express way 1K ey words :traffic engineering ;v olume Οdelay m odel calibration ;BFG S non Οlinear regression ;express way 目前,交通规划软件已大量应用于交通规划中。
多路径OD矩阵反推下的路阻函数标定方法
路线 L(i-j,s)的长度被定义为有效路段[i,j]的路权 d(i,
j)加上有效路段终点 j 至出行终点 s 的最短路权 Lmin(j,s), 即:
L(i-j,s)=d(i,j)+Lmin(j,s)
(4)
各交通节点之间的最短路权是指交通节点之间的最短
路径, 目前常用的计算方法有矩阵迭代法、函数迭代法、
强度和他们之间的阻力,认为两个交通小区的出行吸引两个
使用重力模型前,首先要对阻抗函数参数进行标定,以
交通小区的出行发生量与吸引量成正比,而与交通小区之间 便能够很好地拟合基础年数据。常用的标定方法有最小二乘
的交通阻抗成反比。双约束重力模型的表达式如下:
ห้องสมุดไป่ตู้
法、线性回归法和试算法。最小二乘法和线性回归法在基年
异性的原因,幂指数函数在国内城市交通需求预测的实践过程中得到的交通分布结果并不理想。论文运用多路径分配进行 OD
矩阵反推,其结果对交通路阻进行标定, 并用南昌城区的实例说明该函数参数的有效性。
关键词:多模式分配 ; 路阻函数; Tr ansCAD; 参数标定
中图分类号:U491 .1 +23
文献标识码:A
22
配的顺序很重要。一个节点被分配时,必须保证它的上游节 点均被分配,即所有其它节点的出行量可能经过该节点的流 量均已经被确定。T(n,s)代表该节点所产生的或中转的所有 终点为 s 的出行量。这样就可以保证交通量分配时能够全部 分配,没有遗漏。对于终点 s 的出行量批分配时,第一个被分 配节点的选择是很重要的,它必须是无上游的节点,即其它 节点要到达终点是不经过此节点的。取计算机搜索到的第一 个点,起点分配后,可取搜索到的第一个其它的无上游的节 点或上游节点均已经分配的中间点进行分配。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阻抗函数值标定过程
路段阻抗函数是用数学公式来描述出行时间与路段流量和最大通行能力之间的关系。
BRP 函数是一个最常用的路段性能函数。
BRP 函数将路段出行时间表达为流量与通行能力之比的函数。
其公式为:
1f v t t c β
α⎡⎤
⎛⎫=+⎢⎥ ⎪⎝⎭⎢⎥⎣
⎦
其中:t 为拥挤路段的出行时间; f t 为路段自由流出行时间; v 为路段流量;
c 为路段通行能力;
α,β为待标定参数,若没有数据进行标定,一般α=0.15,β=4.0;
对路段阻抗函数进行参数标定之前,对BRP 函数公式进行对数化处理,得
ln 1ln ln f t v t c αβ⎛⎫⎛⎫-=+ ⎪ ⎪ ⎪⎝⎭⎝⎭
其中:t ,f t ,v ,c 都是常数,可以从调查中得到;
设ln 1f t t ⎛⎫- ⎪ ⎪⎝⎭
=b ,ln α=y ,ln v c ⎛⎫
⎪⎝⎭=k ,β=x ,则有y kx b =+;
即可转化为一元回归分析,利用最小二乘法求出待标定参数
α,β。
利用公式:1112211n
n n i i i i i i i n n
i i i i n x y x y n x x β=====⎛⎫⎛⎫
- ⎪⎪⎝⎭⎝⎭=⎛⎫
- ⎪⎝⎭
∑∑∑∑∑,y x αβ--=-即可求出待标定参数。
例1:某局部路网包括主干路、次干路及支路,每种类型路段调查3组数据,见表1。
注:数据自己调查进行标定。
此外,该函数也可以对行人阻抗进行标定,如综合交通枢纽中的行人换乘,包括电动扶梯、平面路段、平面通道。
本文档系本人从网络获得,若有侵权,烦请QQ253169161,第一时间处理。