转台设计指导书
双轴转台的设计说明书【甄选文档】
双轴转台的设计说明书e题目双轴转台的设计学生姓名 e 学号 e所在学院机械工程学院专业班级 e指导教师 e完成地点 e2009 年 6 月 6 日双轴转台的设计作者:e(e)指导老师:e[摘要] 本文以西泰克卧式力矩电机直驱的双轴转台为分析对象,采用角接触球轴承为支承方式,设计一台力矩电机直驱的双轴转台。
力矩电机转台采用的直驱技术提供了高动态特性、高精度和高可靠性。
安装后无后期维护、无精度磨损。
基于简单而对称的结构设计,所有部件、电机、轴承完美的结合在一起,可获得更高的稳定性和系统刚性。
[关键词]五轴联动双轴转台力矩电机直驱技术Biaxial turntable designe(e)Tutor: eAbstract:In this paper, CyTec horizontal biaxial torque motor direct drive turntable is analyzed, using angular contact ball bearings to support the way, the design of a direct-drive torque motor biaxial turntable. Torque direct drive motor technology uses a turntable provides a highly dynamic, high precision and high reliability. No post-maintenance after installation, no precision wear. Based on a simple and symmetrical design, all components, motors, bearings perfectly together, get a higher system stability and rigidity.Key words: Five-axis;Biaxial turntable;Torque motor;Direct drive technology引言这次课程设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。
转台设计指导书

4
图 1-9 多轴转台
2
图 1-5 双轴转台
图 1-6 双轴转台内框结构
3
图 1-7 双轴转台外框结构
(3) 三轴转台 结构如图 1-8 所示。 图 1-8(a)是立式三轴转台, 图 1-8(b)是卧式三轴转台。
(a) 立式三轴转台 图 1-8 三轴转台
(b) 卧式三轴转台
(4)多轴 由三轴以上组成的转台,结构如图 1-9 所示。
I
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
1.1.1 按机械台体结构分类
转台分为立式转台和卧式转台两种。 (1)立式转台 立式转台的外框轴垂直于地平面,立式转台的结构多数为音叉式,其内 框架结构多数为圆盘式,少数为 O 型,结构如图 1-1 所示。
外框轴
图 1-1 立式转台
简易转台控制系统设计
简易转台控制系统设计
一、任务
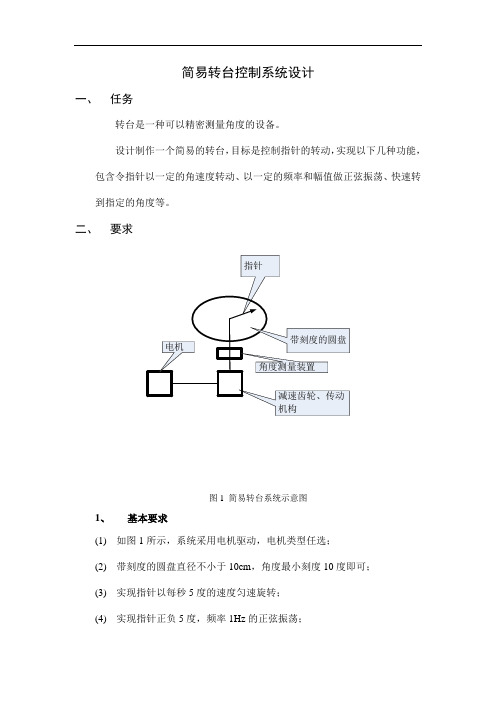
转台是一种可以精密测量角度的设备。
设计制作一个简易的转台,目标是控制指针的转动,实现以下几种功能,包含令指针以一定的角速度转动、以一定的频率和幅值做正弦振荡、快速转到指定的角度等。
二、要求
图1 简易转台系统示意图
1、基本要求
(1)如图1所示,系统采用电机驱动,电机类型任选;
(2)带刻度的圆盘直径不小于10cm,角度最小刻度10度即可;
(3)实现指针以每秒5度的速度匀速旋转;
(4)实现指针正负5度,频率1Hz的正弦振荡;
(5)实现指针正负10度,频率0.2Hz的正弦振荡。
2、发挥部分
(1)设置角度测量装置,测角精度至少0.5度;
(2)PID控制是最常用的闭环控制手段,其中P代表比例环节,它能调节整
个系统的增益,如果比例环节数值较大,系统跟踪常值指令时会出现
超调现象。
指针初始位置设置在0度,要求采用PID控制方法,使指
针角度快速变化到30度;
(3)将比例环节参数调大,令系统在完成(2)的过程中出现超调。
三、说明
(1)尽量使用STC公司的最新系列单片机产品。
(2)减速齿轮和传动机构可以省掉不设计,即电机轴可直接带动指针运动;(3)发挥部分(1)的角度显示可用上位机,也可用液晶屏。
四、评分标准。
数控回转工作台设计--本科毕业设计说明书

数控回转工作台设计--本科毕业设计说明书内蒙古工业大学本科毕业设计说明书学校代码: 10128学号:201220102052(题目:数控回转工作台设计学生姓名:张英智学院:机械学院系别:机械系专业:机械电子工程班级:机电12-1指导教师:张兰挺副教授二〇一六年六月摘要本次设计的数控回转工作台主要是与立式铣床配套使用,其精度直接影响到机床的性能。
本次设计选择由步进电动机作为动力源,一级圆柱直齿轮减速器进行减速及传递转矩和转速,将其传递给蜗轮蜗杆机构来带动工作台进行回转加工工作。
数控回转工作台与数控立式铣床结合使用可进行工件的分度和切削旋转,配合机床X、Y、Z三轴的直线运动可以扩大机床的加工范围,来提高机床的工作效率。
配合数控系统的控制,数控回转工作台可以有效提高生产效率,消除人为误差,提高加工精度。
本次主要设计方向是数控铣床中的数控回转工作台,我们对主要的零件进行了结构功能设计。
装配图、零件图用CAXA软件绘制。
关键词: 立式铣床数控回转工作台齿轮蜗轮蜗杆内蒙古工业大学本科毕业设计说明书AbstractThe design of the NC rotary table is mainly with vertical milling machine , Its precision directly affects the performance of the machine. The design choices the stepping motor as a power source. Level of cylindrical spur gear reduce of reduction and transmission torque and rotational speed, pass it to worm and worm wheel mechanism to drive the workbench rotary processing work. NC rotary table with NC vertical milling machine combined with the use of artifacts can be dividing and cutting rotation, cooperate with X,Y,Z three axis machine tool can expand the linear motion of the machine tool processing range, to improve the working efficiency of the machine tool. With NC system, the control of NC rotary table can effectively improve the production efficiency, eliminating human error, and improve the machining accuracy. The main design direction is the NC rotary table in CNC milling machine, structure and function of main parts of our design. Assembly drawing and part drawing drawn using CAXA software.Key Words: Vertical milling machine;NC rotary table;Worm and worm gear;内蒙古工业大学本科毕业设计说明书目录绪论 ..................................................................... ... 1 第一章数控回转工作台的发展方向 (2)1.1数控回转工作台的发展及展望 (2)1.2数控回转工作台的原理 (2)1.3 设计要求及主要参数 (4)1.3.1设计准则 .......................................................41.3.2此次设计中的一些主要参数 .......................................4 第二章工作台设计和零部件的选用 (5)2.1设计工作台的基本要求 (5)2.2数控回转工作台传动方案的确定 (5)2.3电机的选择 (6)2.3.1脉冲电动机在选择时需要注意的事项 ...............................62.3.2电机的参数计算 .................................................72.4齿轮的设计 (9)2.4.1齿轮材料确定 ...................................................92.4.2齿轮强度计算 ...................................................92.4.3尺寸计算 ......................................................132.5蜗轮蜗杆设计 (14)2.5.1蜗轮蜗杆强度设计 ..............................................142.5.2 蜗杆与蜗轮的参数 ..............................................162.6联轴器的选择 (17)2.7 输入轴的设计 (17)2.7.1 轴上参数计算 ..................................................172.8 蜗杆轴的设计 (21)2.8.1 蜗杆轴参数设计 ................................................212.8.1 轴强度的校核 ..................................................23 总结 ..................................................................... .. 24 参考文献 ...................................................................25 致谢 ......................................................................26内蒙古工业大学本科毕业设计说明书绪论近年来社会的快速进步表现于机械行业是一个国家发展的最重要的决策,它不仅可以为新的科学技术和新产物的研发和机械制造带来了十分必要的前提,还是不可替代的经济快速发展行业。
转台设计指导书
图 1-5 双轴转台
图 1-6 双轴转台内框结构
3
Байду номын сангаас
图 1-7 双轴转台外框结构
(3) 三轴转台 结构如图 1-8 所示。 图 1-8(a)是立式三轴转台, 图 1-8(b)是卧式三轴转台。
(a) 立式三轴转台 图 1-8 三轴转台
(b) 卧式三轴转台
(4)多轴 由三轴以上组成的转台,结构如图 1-9 所示。
I
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
目 录
第 1 章 转台总体设计 ...............................................................................................
转台控制系统设计
电磁骚扰是指任何可能引起装置、设备或系统性能降低或者对生命或无生命物质产生损害作用的电磁现象。
它可以通过辐射和传导两种方式转播,而辐射骚扰的测试必须要考虑可重复性、经济性、准确性、抗干扰性和快速定位。
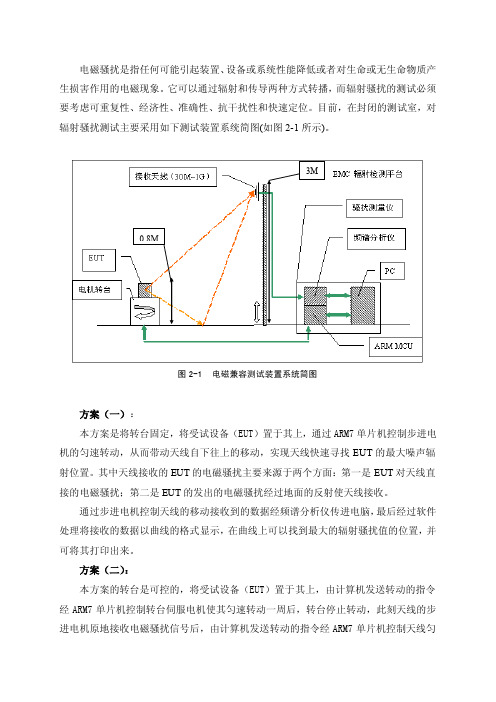
目前,在封闭的测试室,对辐射骚扰测试主要采用如下测试装置系统简图(如图2-1所示)。
3M0.8M图2-1电磁兼容测试装置系统简图方案(一):本方案是将转台固定,将受试设备(EUT)置于其上,通过ARM7单片机控制步进电机的匀速转动,从而带动天线自下往上的移动,实现天线快速寻找EUT的最大噪声辐射位置。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
方案(二):本方案的转台是可控的,将受试设备(EUT)置于其上,由计算机发送转动的指令经ARM7单片机控制转台伺服电机使其匀速转动一周后,转台停止转动,此刻天线的步进电机原地接收电磁骚扰信号后,由计算机发送转动的指令经ARM7单片机控制天线匀速向上移动,同时天线将接收到得信号经频谱分析仪处理后所得的数据,经过串口发给计算机,由计算机里测试软件以一定的算法、最快的速度处理数据,以此找到设备在该点的最大电磁骚扰值。
等天线向上移动1M后,由计算机的测试软件发出指令,使天线停止,同时让再次匀速转动一周,在转动中有天线接收EUT发出的电磁骚扰信号,后面的步骤如上所述。
当计算机读完四次数据时天线移动到最顶端。
测试完毕,由测试软件发出指令使天线回到原始位置,以便下次的测试。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
三轴转台仿真设计---设计说明书
目录摘要 (3)Abstract (4)1 绪论 (6)1.1 引言 (6)1.2 国外研究状况 (6)1.3国内研究状况 (6)2 三轴转台的机械设计 (8)2.1 三轴转台的概述 (8)2.1.1 三轴转台的性能指标 (8)2.1.2三轴转台工作原理概述 (8)2.1.3 伺服驱动电机的选择与计算 (9)2.1.4 直流力矩电机的计算分析 (12)2.1.5 框架的选材 (13)2.2 转台结构的设计 (14)2.2.1 外环装配示意图 (14)2.2.2 中环装配示意图 (15)2.2.3 内环装配示意图 (15)2.2.4 总装配示意图 (16)2.2.5 零件示意图 (16)3 伺服系统的总体设计 (17)3.1伺服系统的组成 (17)3.2 三轴转台的工作原理 (18)3.3 伺服系统硬件的选择 (18)3.3.1 直流电机驱动器的选择 (19)3.3.2 圆光栅编码器增量式YGM506 的选择 (20)3.3.3 稳压器的选择 (20)3.3.4 软件可编程器件的选择 (21)3.3.5 串口卡的选择 (21)3.4 伺服控制系统的硬件接线图 (23)4 三轴转台的运动仿真 (24)4.1 概述 (24)4.1.1 主要优点 (25)4.1.2 研究复杂的实际情况 (25)4.2 三轴转台仿真过程[20] (26)5 结论 (28)6 工作展望 (29)致谢 (30)参考文献 (31)2王伟摘要航空、航天工业发展水平是一个国家科技、经济及国防实力的重要标志。
在航空航天领域中, 惯性导航和制导技术是一项核心技术, 三轴转台是测试惯性元件及半实物仿真的重要非标设备, 其性能的好坏直接影响仿真和测试的可靠性和置信度。
三轴转台是以控制理论、相似理论、系统技术和信息技术为基础,利用计算机和专用物理设备为工具,为惯性导航和制导系统仿真试验提供平台的关键设备【1】。
它能够复现空间质心运动中的转角、角速度、角加速度等物理指标。
雷达底座转台设计
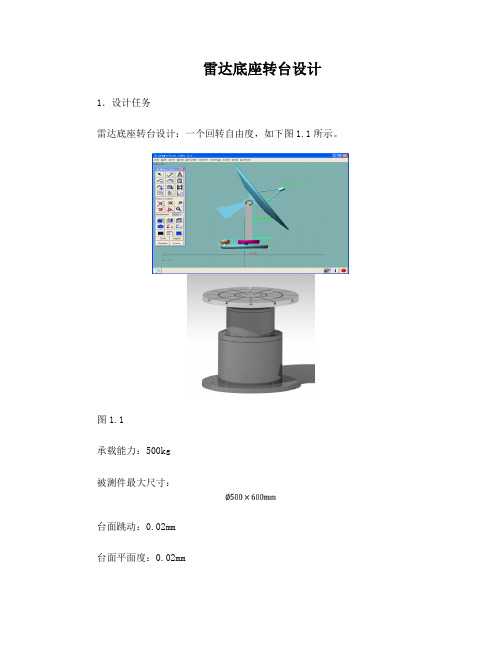
雷达底座转台设计1.设计任务雷达底座转台设计:一个回转自由度,如下图1.1所示。
图1.1承载能力:500kg被测件最大尺寸:台面跳动:0.02mm台面平面度:0.02mm台面布置T型槽,便于安装负载方位转角范围:具有机械限位和锁紧机构角度位置测量精度:角度位置测量重复性:角速范围:2.设计流程根据机电产品现代设计方法,其设计流程大致如下图2.1所示。
设计流程图2.1根据上图所示,整个设计过程可分为四个阶段:功能设计、总体方案设计、详细设计和设计。
功能设计部分,是在结合所给出的重要性的要求及用户可能的功能目标需求的前提下,对转台的功能进行定义分析,将每一个功能细化为一个个的功能元,利用QFD图对实现各种功能的所对应的技术的相对重要性进行分析,相对重要性较高的功能技术便是设计的重点所在。
总体方案设计部分,通过利用SysML语言来明确各部分之间的功能参数和参数约束关系,并完成草图的设计。
详细设计部分,需要使得零件实现其预定的功能,并保证其精度和强度的设计要求。
在详细设计阶段主要是利用cad等三维建模软件,完成系统的3D图,并生产对应的2D图,完成整个设计。
对于重要的零部件需要利用有限元软件进行仿真分析,保证其可靠性。
最后还需要应用动力学和运动学仿真软件进行相关的动力学和运动学分析,确定设计系统满足功能目标要求。
设计总结部分,是对整个设计过程进行反思和总结,考虑整个设计过程中存在的不足和所运用的相关知识。
3.QFD需求-功能-技术分析QFD(全称Qualification Function Deployment),是用来对所设计的系统进行总体设计规划的工具。
QFD主要功能是能够实现工程设计与消费者或用户需求之间的紧密连接,根据消费者需求和用户目标实现对设计过程的实时修改和控制,把用户的功能目标在整个设计过程中得以体现,并根据需求的重要性对整个系统做出相应的设计规划,有重点的进行设计。
本设计根据用户对于雷达底座转台的功能重要性的需求,首先给出其需求和功能之间的联系,如下图3.1所示的质量屋,屋顶为系统的功能,包括驱动元件的转速、体积、重量,及传动元件和传感器的可靠性等,左侧围用户对于系统的功能目标的需求,由用户直接给出的功能,如角度位置测量精度:、角度位置测量重复性:、角速范围:等和用户潜在的功能需求,如人机交互、成本、节能等方面的需求组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我们为您定制个性化转台,满足您一切需求
购买转台请发E-mail:wangyi#(#换成@)
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
购买转台请发E-mail:wangyi#(#换成@)
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
我们为您定制个性化转台gyi#(#换成@)
目 录
第 1 章 转台总体设计 ....................................................................................................................... 1 1.1 转台结构类型选择 ................................................................................................................... 1 1.1.1 按机械台体结构分类......................................................................................................... 1 1.1.2 按转台回转轴数量分类..................................................................................................... 2 1.1.3 按转台驱动元件类型分类................................................................................................. 5 1.1.4 按转台轴承分类................................................................................................................. 5 1.2 转台驱动元件选择 ................................................................................................................... 6 1.3 转台测量元件选择 ................................................................................................................... 7 第 2 章 转台机械结构设计 ............................................................................................................... 8 2.1 轴系设计 ................................................................................................................................... 8 2.1.1 轴承选择与固定................................................................................................................. 9 2.1.2 轴承的安装与预紧........................................................................................................... 10 2.2 轴与框架的连接 ..................................................................................................................... 10 2.2.1 胀紧套尺寸选择............................................................................................................... 12 2.2.2 胀紧套安装拆卸与防护................................................................................................... 14 2.2.3 胀紧套结合面的配合....................................................................................................... 14 2.3 框架设计 ................................................................................................................................. 14 2.4 配重设计 ................................................................................................................................. 17 2.5 限位与锁紧装置设计 ............................................................................................................. 17 第 3 章 转台驱动元件设计 ............................................................................................................. 19 3.1 传动部件设计 ......................................................................................................................... 19 3.2 转动惯量计算 ......................................................................................................................... 19 3.3 电机力矩计算 ......................................................................................................................... 21 第 4 章 转台测量元件设计 ............................................................................................................. 24 4.1 角度传感器设计 ..................................................................................................................... 24 4.1.1 旋转变压器....................................................................................................................... 24 4.1.2 感应同步器....................................................................................................................... 26 4.1.3 光电码盘........................................................................................................................... 27 4.2 角速度传感器设计 ................................................................................................................. 28 4.3 限位开关设计 ......................................................................................................................... 30 4.4 走线与滑环 ..................................................................................................................... 31