4 .板壳问题的有限元法(4学时)
7_板壳问题有限元分析

1 1 2 h 1 1 2
h
BiT DB j abd d dz
(6.17)
21 /44
薄板问题的有限元法
代入 D 、 Bi 和 B j 于是有
D 1 1 b2 T kij N i , N j , uN iT, N T, uN iT, N T, j j 1 1 a 2 ab +2(1- )N
2
24 /44
薄板问题的有限元法
k23 15H ab(i j )(i j ) b2 b2 k31 3Ha (2 3 5 2 ) j0 15 2 j 5i0 a a k32 15H ab(i j )(i j )
23 /44
薄板问题的有限元法
其中
b2 a2 a2 b2 k11 3H 0 15( 2 0 2 0 ) (14 4 5 2 5 2 ) 00 b b a a a2 a2 k12 3Hb (2 3 5 2 ) 0i 15 2 i 5 0i b b b2 b2 k13 3Ha (2 3 5 2 )i0 15 2 i 50 j a a a2 a2 k21 3Hb (2 3 5 2 ) 0 j 15 2 j 5 0i b b a2 k22 Hb 2(1 ) 0 (3 50 ) 5 2 (3 0 )(3 0 ) b
1 E D 2 1 0
薄板问题的有限元法
图 6.2 平板内力
10 /44
薄板问题的有限元法
设 M x 、 M y 和 M xy 表示单位宽度上的内力矩,于是有
2w 2 x Mx h h3 2 w h3 M M y h2 z dz D DC D 'C (6.5) 2 12 y 12 2 M xy 2w 2 xy
有限元板壳——王勖成

弹性矩阵
t z [ D p ]{ }dz [ D p ]{ } [ D ][ ] 12
薄板弯曲问题中的弹性矩阵[D]
1 0 1 0 Et 3 1 [ D] 0 D0 1 0 2 12 (1 ) 1 1 0 0 0 0 2 2
Et 3 D0 12(1 2 )
内力矩表示薄板应力的公式
12 z { } 3 {M } t
平衡方程
2 M xy 2 M y 2M x 2 q ( x, y ) 0 2 2 x xy y
由广义应力应变关系及几何关系代入平衡方程得 由W的微分方程:
非协调板单元可以通过分片试验,当单元划分不断缩 小时,计算结果可以收敛于精确解答,但是收敛并非 一定是单调的,即不一定是精确解的上界或下界。
2.2 薄板三角形单元
a1 a 2 x a3 y a 4 x 2 a5 xy a6 y 2 a7 x 3 a8 x 2 y a9 xy 2 a10 y 3
基本方程
w v z y
(1)位移:由假设(1)、(3),有 w w w( x, y ) u z x (2)应变
由假设(1)、(2),薄板弯曲问题只需要考虑三 个分量。根据几何方程,应变可表示为
2w u 2 x x x 2w u { } y z 2 y y xy u v 2w 2 xy y x
形变分量:中面x和y方向的曲率与x,y方向 的扭率。
广 义 应 变
2w 2 x 2w { } 2 y 2 w 2 xy
6板壳有限元
i 4,1
b2 c2 d 2 0 0 (2) a2 e2 i 2
(3) , (4)
最后利用本点1,确 定a2=b/8,代回
弹性薄板矩形(R12)单元
薄板弯曲问题
平面应力: 0 z xz yz
y
z
x
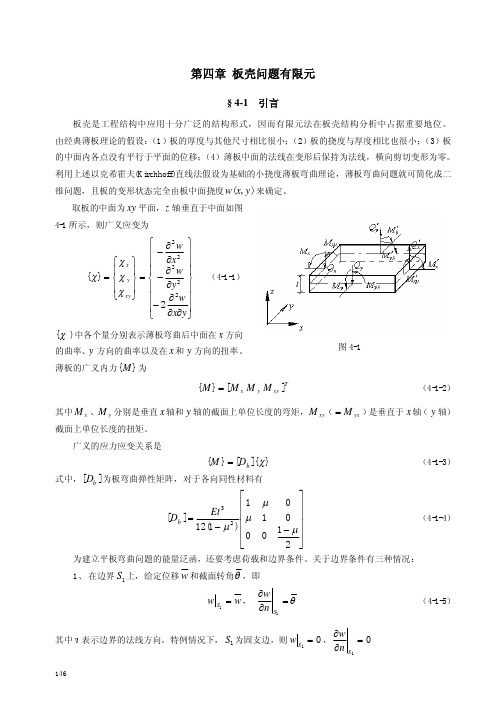
与平面应力问题不 同,薄板弯曲问题是 具有图示几何特征的 结构在横向荷载作用 下的分析。
弹性薄板基本知识
弹性薄板基本概念 所谓薄板是指板厚h比板 最小尺寸b在如下范围的平 y 1 1 h 1 1 板 ~ ~
100 80 b 8 5
N i N i N N 1
N xi
N yi
My1
x3 y3
4
N 4
则薄板的挠度场可由结点位移表示为
w N i d i N d
i 1
e
4) 单元间位移的协调性 可以证明,上述w在边线上任意一点的挠度和 转角都是三次多项式。
弹性薄板矩形(R12)单元
对于转角yi相关的形函数,可推导得 ,
z
N xi b i (1 0 )(1 0 )(1 - )/8
2
N yi a i (1 0 )(1 0 )(1 - 2 )/8
弹性薄板矩形(R12)单元
3) 薄板的挠度场 有了每一结点的形函数,记
Q1 1 Mx1 4 x w3 2 y z 3
M y zdzdx
M xy zdzdy
' xy - h/2
- h/2 h/2
- h/2 h/2
第7章 薄板弯曲问题的有限元法
u z 0 0 v z 0 0
分别表示薄板弯 曲曲面在x,y方 向的曲率
w u z x v z w y
绕x轴转角
表示薄板弯曲曲 面在x,y方向的 扭率
2w x 2 x 2w y 2 y 2w xy xy
3
2)厚度不变假设:即忽略板厚变化。即 z 0 。由于板内各点的挠度与 z 坐标无关,只是x,y的函数,即 w w( x, y) 3)中面上正应力远小于其它应力分量假设:平行于中面的各层相互不挤压, 不拉伸,沿z向的正应力可忽略,即 z 0
4)中面无伸缩假设:弯曲过程中,中面无伸缩,(薄板中面内的各点都 没有平行中面的位移)即 u z 0 0 v z 0 0
2
三、矩形薄板单元分析 用有限元法求解薄板弯曲问题,常在板中面进行离散,常用的单元有 三角形和矩形。为了使相邻单元间同时可传递力和力矩,节点当作刚性节 点,即节点处同时有节点力和节点力矩作用。每个节点有三个自由度,即 一个扰度和分别绕x,y轴的转角。 m l 1.设位移函数 xl
yl wl
图中力矩双箭头方向表示是力 矩的法线方向,列平衡方程:
(M ) y 0 (M ) x 0 Fz 0
M xy M y FSy F FSy 0 FSy dx ( FSy dy)dx FSx dy ( FSx Sx dx)dy qdxdy 0 y y x x M xy M x 由应力的正负方向的规定得出: FSx 0 y x 正的应力合成的主矢量为正, 2 2 2 2 F F w w 正的应力乘以正的矩臂合成的 Sx Sy q 0 D 2 2 2 2 q y y x 主矩为正;反之为负。 x y x 2 2 或者D w q, 式中, = 2 2 表示拉普拉斯算子。 x y
11第4章板壳问题有限元
w S1 w ,
w n
S1
( 4-1-5)
其中 n 表示边界的法线方向。特例情况下, S1 为固支边,则 w S 0 ,
1
w 0 n S1
146
2 、 在边界 S 2 上,给定位移 w 和力矩 M n ,即
w S w , M n
2
S2
M n
( 4-1-6)
特例情况下, S 2 为简支边,则 w S 0 , M n
2 2
(常曲率和常扭率)项,因为将它们代入式( 4-1-1)可以得
2 w 2 2 4 x 2 w 2 2 6 y
2
2 w 2 5 x y
( 4-2-3)
因此,在板弯曲单元的挠度函数中存在常数项、一次项和二次项,就可以满足完备性条件。 (2 )协调条件: 以单元 1-2 边为例,该边上 y 为常数,挠度 w 是 x 的三次函数
如平板的表面上作用有 z 向的分布荷载 q , 则从以上各式可以得到经典薄板理论的系统总位能泛函 表达式
1 w T D qw dxdy Q wdS M n dS b n S3 S2 S3 2 n
{M } [Db ]{ }
式中, [ Db ] 为板弯曲弹性矩阵,对于各向同性材料有
(4-1-3)
1 0 Et [D b ] 1 0 2 12(1 ) 1 0 0 2
3
(4-1-4)
为建立平板弯曲问题的能量泛函,还要考虑荷载和边界条件。关于边界条件有三种情况: 1 、 在边界 S1 上,给定位移 w 和截面转角 ,即
2 4 w T e ] z [B i ]{ z[ B ]{ } i} x y i 1
机械工程用有限元法学习笔记(四)

薄板弯曲问题的有限元法一、 薄板弯曲问题的基本方程什么是薄板?薄板就是指厚度t 远小于其长度、宽度的板。
1. 三个基本假设(克希霍夫假设): (1) 法线假设,εz =0,γyz =γzx =0 (2) 正应力假设,σz <<σx ,σy ,τxy (3) 小挠度假设,w<t/4根据假设,可以得到位移分量()()()()()(),,,,,,,,,,, x y z u x y z z x x y z v x y z z y x y z x y ωωωω∂⎧=-⎪∂⎪∂⎪=-⎨∂⎪⎪=⎪⎩式4-1图 1 薄板弯曲后某点B 的位移2. 应变分量{}222222x y z x z y x y ωεωεεεω⎧⎫∂-⎪⎪∂⎪⎪⎧⎫⎪⎪∂⎪⎪⎪⎪==-⎨⎬⎨⎬∂⎪⎪⎪⎪⎩⎭⎪⎪∂-⎪⎪∂∂⎪⎪⎩⎭式4-23. 曲率{}222222x y z x y x y ωχωχχχω⎧⎫∂-⎪⎪∂⎪⎪⎧⎫⎪⎪∂⎪⎪⎪⎪==-⎨⎬⎨⎬∂⎪⎪⎪⎪⎩⎭⎪⎪∂-⎪⎪∂∂⎪⎪⎩⎭式4-3 22=x x ωχ∂-∂——薄板弹性曲面在x 方向的曲率22=y yωχ∂-∂——薄板弹性曲面在y 方向的曲率2=z x yωχ∂-∂∂——薄板弹性曲面在x 方向和y 方向的扭率4. 应力分量与应变分量间的关系:{}[]{}2222222222221 11D Ez xy Ez x y Ez x y σεωωμμωωμμωμ=⎧⎫⎛⎫∂∂-+⎪⎪ ⎪-∂∂⎝⎭⎪⎪⎪⎪⎛⎫∂∂⎪⎪=-+⎨⎬ ⎪-∂∂⎝⎭⎪⎪⎪⎪∂⎪⎪--∂∂⎪⎪⎩⎭式4-4 5. 线力矩{}()2222222101012110022x y z x M Et M M y M x y ωμωμμμω⎧⎫∂-⎪⎪⎡⎤∂⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥∂⎪⎪⎪⎪==-⎨⎬⎨⎬⎢⎥∂-⎪⎪⎪⎪⎢⎥-⎩⎭⎪⎪⎢⎥∂⎣⎦-⎪⎪∂∂⎪⎪⎩⎭式4-5a广义应力与广义应变之间的关系式{}[]{}D M χ= 式4-5b式中:[D]—薄板弯曲问题的弹性矩阵6. 薄板弯曲问题的基本方程(双调和方程)()32222222121Et p xx y y ωωωμ⎛⎫∂∂∂++= ⎪∂∂∂∂-⎝⎭ 式4-6()32121Et μ-——薄板弯曲刚度 二、 矩形薄板单元分析 1、矩形薄板单元图 2 矩形薄板单元2、位移函数22123456322333789101112 a a x a y a x a xy a y a x a x y a xy a y a x y a xy ω=+++++++++++ 式4-73、形状函数[]{}k i i xi xi yi yi j j xj xj yj yj k kxk xk yk y l l xl xl yl yl N N N N N N N N N N N N N q ωωθθωθθωθθωθθ=+++++++++++= 式4-8式中:i,j,k,l ——节点号N i ,N xi ,N yi ,……,N yl ——形状函数()()()()()()()()()()2211128N 111 ,,,8111 8y i i i i i xi i i iyi i i i b N i i j h l N a x a b ξξηηξξηηξηηξξηηηξξξηηξξη⎧⎫++++--⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪=-++-=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪++-⎪⎪⎩⎭==, 式4-94、单元刚阵[][][][]S K TB D B dxdy =⎰ 式4-10式中:[]22222222222222222222 2222yi yl i xiyi yl ixi yi yl i xi N N N N x x x x N N NN B y y y y N N N N x yx yx yx y ⎡⎤∂∂∂∂⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂=⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂∂∂∂∂⎣⎦式4-11 5、节点力与节点位移的关系式{}[]{}F K q = 式4-12三、 三角形薄板单元分析1、三角形薄板单元当薄板具有斜交边界或曲线边界时,可采用三角形单元较好地反映边界形状。
(完整版)第九章板壳结构有限元
单元数 (1/4板)
2×2 4×4 6×6 理论解
四边固定
板中心挠度 wD/PL2
边中点弯矩 M/P
0.00614
-0.1178
0.00580
-0.1233
0.00571
-0.1245
0.00560
-0.1257
薄板三角形单元
三角形单元能较好地适应斜边界,实 际中广泛应用。单元的结点位移仍然 为结点处的挠度wi和绕x,y轴的转角
θxi、θyi,独立变量为wi。三角形单元 y
位移模式应包含9个参数。
θx1 1
θy1
z
w1
x 3
2
如果在直角坐标系下建立位移模式,则完全三次多项式需要 10个参数
若以此为基础构造位移函数,则必须去掉一项。无法保证对称。
薄板三角形单元
三角形单元采用直角坐标系建立位移模式的尝试: Tocher方案
单元有两边分别平行于x轴和y轴时,上述位移模式中的待定系数将无法
四次项的选取为了保证坐标的对称性,且曲率与扭率同阶次。 利用12个结点位移条件,由广义坐标法可建立形函数,显然 十分麻烦。因此形函数的建立采用拉格朗日插值函数形成, 完成这项工作首先需要将其转化为一个2×2的正方形,对于 矩形单元,这项操作并不困难。
薄板矩形单元
下面开始尝试建立形函数。 建立的形函数形式如下:
单元刚度矩阵由16个子矩阵组成,其表示如下
薄板矩形单元
具体的元素计算为:
式中:
薄板矩形单元
结点载荷向量的计算: 假设板单元受横向均布载荷p作用,则 等效结点力为 积分展开,得
如果承受的分布荷载随位置(x,y)变化,积分工作量较大
薄板矩形单元
应用实例
谭继锦有限元法课件之八 5概述薄板单元
F
e
B D B dxdy y
T e
5-11 5-12 5-13
F
e
K
e e
e T
其中: K = B D B dxdy
K
e
就是单元节点位移与单元节点力之间的转换矩阵, 也就是矩形板单元的刚度矩阵。
第五章 板壳问题的有限元法 同时,采用曲面单元来描述壳体的真正几何形状,还可以 同时 采用曲面单元来描述壳体的真正几何形状 还可以 用较少的单元数目来代替复杂形状的壳体,并能得到具有 相当精度的结果 因此就有基于Mindlin理论为基础的曲面 相当精度的结果,因此就有基于 壳体单元。
理论基础 单元类型 3节点三角形单元 Kirchhoff理论 任意四边形单元 4节点的Huges-Liu g 单元 (薄 薄 壳单元,大位移, 大转动, Mindlin理论 大应变) 4节点的Belytschko-Lim - Tsay y薄壳单元 薄壳单元(薄壳单元, 薄壳单元 大位移,大转动) 冲压成型分析及碰 撞问题分析 常规的结构分析 适用问题
第五章 板壳问题的有限元法 本章介绍薄板单元及薄板弯曲的有限元法,薄壳单元及 薄壳问题的有限元法。通过板壳单元理论和板壳单元介绍, 掌握板壳问题的有限元法。 掌握板壳问题的有限元法
第 节 概述 第一节
与平板相对应,由两个曲面为界限所围成的物体,当两 曲面间的距离远小于物体的其它尺寸时,这种结构物称为壳 体。两曲面之间的距离,称为壳体的厚度,平分厚度的曲面 称为中曲面,一般工程上以壳体厚度与中曲面的曲率半径比 值小于1/20被认为是薄壳。
e
T i
T j
有限元法PPT课件
Motorola– Drop Test Fujitsu-Computers Intel –Chip Integrity
电子
Baxter - Equipment J&J – Stents Medtronic - Pacemakers
医疗
Principia-spain Arup-U.K. T.Y. Lin - Bridge
有限元法
左图所示,为分析齿轮上一个齿内的应力分布,可分析图中所示的一个平面截面内位移分布.作为近似解,可以先求出图中各三角形顶点的位移.这里的 三角形就是单元,其顶点就是节点。
从物理角度理解, 可把一个连续的齿形截面单元之间在节点处以铰链相链接,由单元组合而成的结构近似代替原连续结构,在一定的约束条件下,在给定的载荷作用下,就可以求出各节点的位移,进而求出应力.
一.Abaqus公司简介
公司
’00 ’01 ’02 ’03 ’04 ‘05 ’06 ‘07
18%
18%
20%
SIMULIA公司(原ABAQUS公司)成立于1978年,全球超过600名员工,100% 专注于有限元分析领域。 全球28个办事处和9个代表处 业务迅速稳定增长,是当前有限元软件行业中唯一保持两位数增长率的公司。 2005年5月ABAQUS加入DS集团,将共同成为全球PLM的领导者
Where :
Displacement interpolation functions (位移插值函数)
13.3 Approximating Functions for Two-Dimensional Linear Triangular Elements (二维线性三角形单元的近似函数)
node (节点)
element(单元)
第5章 板壳问题的有限元法
协调性要求 协调单元 满足协调性要求的单元称为 满足协调性要求的单元称为协调单元 收敛的充要条件 w = α1 + α 2 x + α 3 y + α 4 x 2 + α 5 xy + α 6 y 2 + α 7 x 3
+ α 8 x 2 y + α 9 xy 2 + α10 y 3 + α11 x 3 y + α12 xy 3
− 2
h
M xy = ∫ h2 τ xy zdz
− 2
h
{M } = ∫
2 −h 2
h
h {σ }zdz = [D p ]{κ } = [D ]{κ } 12
薄板弯曲的弹性矩阵
11
3
薄板弯曲的应变能 弹性应变能 T 1 1 U = ∫ (σ xε x + σ yε y + τ xyγ xy )dV = ∫ {ε } {σ }dV 2V 2V ⎧ ∂2w ⎫ ⎪ − 2 ⎪ x ⎪ ⎪ ∂2 ⎪ ∂ w ⎪ {σ } = D p {ε } = D p {κ }z {ε } = z ⎨ − 2 ⎬ = z{κ } ∂y ⎪ ⎪ T 1 ∂2w ⎪ U = ∫ {κ } [D p ]{κ }z 2 dV ⎪ 2V ⎪− 2 ∂x∂y ⎪ ⎩ ⎭ T 1 = ∫ {κ } [D ]{κ }dS
∂w 法向导数θ x = ∂y 是x的三次函数,假定
θx = γ1 + γ 2x + γ 3x + γ 4x
2
3
由节点1和节点2处只能提供 θx1,θx2 两个相邻单元在边界上的法向导数的连续性 不能保证。 这种位移函数的矩形单元为非协调单元。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 板壳问题的有限元法
章节内容: 5.1 薄板弯曲的基本理论 5.2 薄板单元:矩形单元和三角形单元 5.3 薄壳有限元分析的简介
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.1 薄板(thin plate)
工程实际中,存在大量的板壳构件(plate and shell) 几何特点:厚度远远小于其它两个方向的尺寸。 薄板:t/b < 1/15 中面:平分板厚度的平面 坐标系oxyz :xy轴在中面上,z轴垂直于中面 z 载荷 作用于中面内的载荷:平面应力问题 垂直于中面的载荷:板弯曲
其中
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
局部坐标系
局部坐标系对整体 坐标系的方向余弦 矩阵(从整体坐标 到局部坐标)
局部坐标系与整体坐标系的关系
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
坐标变换矩阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
转换矩阵:
3.
应力
引起的形变很小,在计算变形时可以忽略。
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.2 位移
位移分量:薄板中面的挠度 w 根据挠度,可以计算:在x和y轴方向上的位移分量和绕x和y轴方 向的转角。
y
z
b
o
车辆工程教研室
t
x
机电工程学院
5.1 薄板弯曲的基本理论
5.1.3 应变及几何方程
机电工程学院
5.1.5 平衡方程
t为薄板的 厚度
D为薄板弯曲 的弹性系数矩 阵
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.5 平衡方程
应力和内力矩之间的 关系式:
可以看出,应力沿厚度方向 线性分布,最大值出现在薄板的 上下表面处(z=±t/2)
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
y j
m O
i
x
特点(与矩形单元相比):
计算精度略低 具有更高的适应性和灵活性,可以较好的模拟边界形状较复杂的 板。
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
y
j
m O
i
位移模式
e T T
x
T T
i j m i T wi xi yi T
5.5 薄壳有限元分析
5.5.1 矩形壳元
单元足够小时,可以用平板单元拼成的折板近似代替光滑壳结构。 局部坐标系 位移向量 面内变形:2个位移u, v 弯曲变形:3个分量(1个挠度w和2个转角θx,θy) 附加位移分量:θz
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
薄壳
薄壳:厚度比其它尺寸(长度、曲率半径等)小很多的壳体。 中曲面:由壳体厚度中点构成的曲面。
薄壳中曲面的变形
弯曲变形: 横截面上的正应力和平行于中曲面的切应力合成弯矩和扭矩 伸缩变形: 中曲面内的正应力和切应力合成中面内力或膜力
y b
o
t
x
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.1 小挠度薄板弯曲理论 (small deflection theory of thin plate)
克西荷夫假设(Kirchhoff): 1. 假设薄板中面的法线在变形后仍为直法线。
2.
厚度方向的位移沿板厚是不变的:即厚度方向的点的位移相同 或者与在厚度方向的位置无关。
机电工程学院
5.5 薄壳有限元分析
消除奇异的方法
非常小的非 零数!
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
应用的限制
由于是平面问题简单的叠加,导致单元仍为平面单元,无法描述像 汽车冲压件一类更复杂的曲面。
车辆工程教研室
x
车辆工程教研室
机电工程学院
5.4 板弯曲有限元法的进一步讨论
薄板矩形单元和三角形单元的使用局限性:
都属于非协调单元(部分协调单元) 不适用于厚板 不容易适应复杂边界
改进方法:
建立协调元,将挠度、转角和扭曲率作为节点位移参数; 放弃直法线假设,将节点位移和转角都作为独立的变量; 采用参数单元,类似于平面问题,将平面应力状态和弯曲状态 叠加,构建一六自由度的薄板单元与六自由度的梁单元组合, 形成常见的板梁组合结构。(见下节)
5.1.6 虚功方程
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 薄板矩形单元 (单元描述)
z
y 薄板弯曲只研究中面的变形,因此: p a a m 单元面的任意一点 = 长度为板厚的法线段 b 几何形状:2a×2b 2b x O 节点:4个 wi θyi b 节点编号:逆时针 局部坐标系:直角坐标系oxyz i 2a j θxi 因此, 节点位移 挠度:w 两个转角: x 和 y e T T T T T i j m p 单元节点位移列阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
等效节点载荷:
先在局部坐标系下求解; 转换到整体坐标系下 求解在整体坐标系下的位移 然后变换到节点的局部坐标系下求解单元节点位移 再根据局部坐标系下的应力公式求解应力 基于求解的应力再求解弯矩和扭矩。
节点位移和内力的计算:
车辆工程教研室
i T
wi xi yi
T
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 位移模式
单元具有12个自由度 1个独立位移分量:挠度w 多项式构造方法
常数项:1 一次项:x 二次项:x2 三次项:x3 四次项:x3y
y xy y2 x2y xy2 y3 xy3 x4 y4 x2y2
机电工程学院
5.5 薄壳有限元分析
三角形壳元
灵活,可以分析任意 形状的薄壳
局部坐标系的建立 节点位移向量
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
其中
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
坐标变换 单元位移向量变换:
单元刚度矩阵变换:
坐标变换矩阵:
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.4 应力及物理方程
根据基本假设,薄板弯曲问题选用3个基本应力分量:
根据广义虎克定律,可以得到应力和应变之间的关系式:
物理方程
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.4 应力及物理方程
根据基本假设,薄板弯曲问题选用3个基本应力分量:
(i 1,2,3,4)
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.3 单元刚度方程
k
e
B D B dxdy
T
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.4 单元等效节点载荷
单元等效节点载荷列阵
几种载荷情况: 横向集中力或者力矩—集中力点取做节点; 法向集中力(需要按照等效原则移置到节点上)
答:(1)沿x轴和y轴的方向挠度函数都是三次多项式,因此能够保 证单元内部及相邻单元之间挠度的连续性。(2)θx和θ y在单元边界 上沿x轴和y轴方向的多项式次数不同,因此,很难保证相邻单元在 公共边界上转角的连续性。 因此,为部分协调单元(非协调单元)。
车辆工程教研室
z
机电工程学院
5.2 薄板矩形单元
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 位移模式
该位移模式是否满足三个条件? 反映单元的刚体位移
答:刚体位移是指挠度和转角为常数。因此常数项和2个一次项反映 了单元的刚体位移。
反映单元的常应变
答:应变为挠度的二次偏导数。因此3个二次项反映了单元的常应变。
位移函数保证单元内部及相邻单元之间位移的连续性
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
位移模式
9个自由度 插值方法
y
j
多项式插值 常数项:1 一次项:x 二次项:x2 三次项:x3
y xy y2 x2y xy2 y3
m
i
O 面积坐标插值 常数项: Li Lj Lm 二次项: Li Lj LjLm Lm Li 三次项: Lj Lm2-LmLj2 LmLi2-LiLm2 LiLj2-LjLi2
分布横向载荷
车辆工程教研室
z
机电工程学院
5.2 薄板矩形单元
5.2.5 整体分析 5.2.6 边界条件
p
a
y
a b
m x
2b wi θyi i θxi
O 2a j
b