西门子螺距误差补偿
西门子840D数控系统螺距误差补偿知识
西门子840D数控系统螺距误差补偿知识西门子840D数控系统螺距误差补偿西门子840D数控系统不同于以前曾广泛应用的810T/M和840C 等老数控系统,它并没有提供专门的双向螺距误差补偿功能,通过对840D系统中的下垂补偿功能的分析研究,找到了一种方法,成功的解决了进行双向螺距误差补偿的问题。
关键词:数控系统下垂补偿功能双向螺距误差补偿由于机床丝杠在制造、安装和调整等方面的误差,以及磨损等原因,造成机械正反向传动误差的不一致,导致零件加工精度误差不稳定。
因此也必须定期对机床坐标精度进行补偿,必要时要做双向坐标补偿,以达到坐标正反向运动误差的一致性。
一、西门子840D数控系统的补偿功能西门子840D数控系统提供了多种补偿功能,供机床精度调整时选用。
这些功能有:1、温度补偿。
2、反向间隙补偿。
3、插补补偿,分为:(1) 螺距误差和测量系统误差补偿。
(2)下垂补偿(横梁下垂和工作台倾斜的多维交叉误差补偿)。
4、动态前馈控制(又称跟随误差补偿)。
包括:速度前馈控制和扭矩前馈控制。
5、象限误差补偿(又称摩擦力补偿)。
分为:常规(静态) 象限误差补偿和神经网络(动态)象限误差补偿。
6、漂移补偿。
7、电子重量平衡补偿。
在西门子840D功能说明样本和资料中所列的众多补偿功能中,都没有指出该系统具有双向螺距误差补偿功能。
但是在下垂补偿功能描述中却指出,下垂补偿功能具有方向性。
这样,如果下垂误差补偿功能,在基准轴和补偿轴定义为同一根轴时,就可能对该轴进行双向丝杠螺距误差补偿,由此提供了一个双向螺距误差补偿的依据。
二、840D下垂补偿功能的原理1、下垂误差产生的原因:由于镗铣头的重量或镗杆自身的重量,造成相关轴的位置相对于移动部件产生倾斜,也就是说,一个轴(基准轴)由于自身的重量造成下垂,相对于另一个轴(补偿轴)的绝对位置产生了变化。
2、840D下垂补偿功能参数的分析:西门子840D数控系统的补偿功能,其补偿数据不是用机床数据描述,而是以参数变量,通过零件程序形式或通用启动文件(_INI文件) 形式来表达。
西门子840D数控系统双向螺距误差补偿

西门子840D数控系统双向螺距误差补偿
邱先念
【期刊名称】《设备管理与维修》
【年(卷),期】2015(0)7
【摘要】西门子840D数控系统不同于曾广泛应用的810T/M和840C等老数控系统,它并没有提供专门的双向螺距误差补偿功能,通过对840D系统中的下垂补偿功能的分析研究,找到了一种方法,成功解决了进行双向螺距误差补偿的问题.【总页数】2页(P32-33)
【作者】邱先念
【作者单位】陕西柴油机重工有限公司陕西兴平
【正文语种】中文
【中图分类】TH17
【相关文献】
1.基于西门子840D数控系统的三轴加工中心几何误差补偿技术
2.基于西门子840D数控系统的龙门五轴数控机床几何误差补偿软件开发
3.高精密数控机床中840D数控系统双向螺距误差补偿的应用
4.SINUMERIK 810D/840D数控系统螺距误差补偿技术研究
5.西门子840D数控系统螺距误差及补偿
因版权原因,仅展示原文概要,查看原文内容请购买。
840C系统的螺距补偿功能介绍

840C系统的螺距误差补偿功能介绍西门子840C系统提供的螺距误差补偿功能是系统的一个选项功能,需单独订购(订货号:6FC5150-0AH01-0AA0)。
该功能可用来提高数控机床的定位精度,经常用在低成本高精度的设备或翻新改造的设备上。
在使用螺距误差补偿功能前,应满足下列条件:1)选项功能可用。
2)使用可靠的仪器(激光干涉仪、步距规等)测量无补偿时的实际螺距误差3) 被补偿轴必须确保重复定位精度达到机床的要求。
4)环境温度湿度稳定,无大的干扰源。
5) 取消被补偿轴的反向间隙。
6) 取消原有的螺距误差补偿。
7)测量实际螺距误差至少2次以上。
8)假设轴的移动路径为正方向。
一、螺距误差补偿的相关机床数据‘*’的含义说明:第1轴,‘*’=0,第2轴,‘*’=1,…,第6轴,‘*’=5二、螺距误差补偿的生效1、执行NCK POWER ON或机床断电后重新上电2、机床必须回参考点三、螺距误差补偿的注意事项1、增量式补偿,对每一点的补偿都会影响其后的各点。
2、定量式补偿,只能给每一个点补偿一个固定的值。
3、在参考点的补偿量为0。
4、从参考点往负方向补偿时: ‘+’:当补偿点的值需要增大才能满足要求时 ‘-’:当补偿点的值需要减小才能满足要求时5、从参考点往正方向补偿时: ‘+’:当补偿点的值需要减小才能满足要求时‘-’:当补偿点的值需要增大才能满足要求时6、所有轴的补偿点总共有1000个,且都位于同一参数区域。
各轴的补偿点不可出现重叠。
7、MD324* 尽量取10的倍数,例如10,20等。
8、如果实际测量间距超出MD 324*的范围,例如100,500,1000等,设定的值应和实际间距成倍数关系,并采用插入补偿方式。
9、如果采用插入补偿方式,参考点的实际位置指针仍要满足4M+1(M=1,2,3,…)的形式。
10、不可使用MD 276*中指定的加速度。
11、选择合适的补偿当量。
四、补偿后的注意事项1、反复检查调整补偿曲线直到满足要求。
西门子840D数控系统螺距误差补偿

西门子840D数控系统不同于以前曾广泛应用的810T/M和840C等老数控系统,它并没有提供专门的双向螺距误差补偿功能,通过对840D系统中的下垂补偿功能的分析研究,找到了一种方法,成功的解决了进行双向螺距误差补偿的问题。
关键词:数控系统下垂补偿功能双向螺距误差补偿由于机床丝杠在制造、安装和调整等方面的误差,以及磨损等原因,造成机械正反向传动误差的不一致,导致零件加工精度误差不稳定。
因此也必须定期对机床坐标精度进行补偿,必要时要做双向坐标补偿,以达到坐标正反向运动误差的一致性。
一、西门子840D数控系统的补偿功能西门子840D数控系统提供了多种补偿功能,供机床精度调整时选用。
这些功能有:1、温度补偿。
2、反向间隙补偿。
3、插补补偿,分为:(1) 螺距误差和测量系统误差补偿。
(2)下垂补偿(横梁下垂和工作台倾斜的多维交叉误差补偿)。
4、动态前馈控制(又称跟随误差补偿)。
包括:速度前馈控制和扭矩前馈控制。
5、象限误差补偿(又称摩擦力补偿)。
分为:常规(静态) 象限误差补偿和神经网络(动态)象限误差补偿。
6、漂移补偿。
7、电子重量平衡补偿。
在西门子840D功能说明样本和资料中所列的众多补偿功能中,都没有指出该系统具有双向螺距误差补偿功能。
但是在下垂补偿功能描述中却指出,下垂补偿功能具有方向性。
这样,如果下垂误差补偿功能,在基准轴和补偿轴定义为同一根轴时,就可能对该轴进行双向丝杠螺距误差补偿,由此提供了一个双向螺距误差补偿的依据。
二、840D下垂补偿功能的原理1、下垂误差产生的原因:由于镗铣头的重量或镗杆自身的重量,造成相关轴的位置相对于移动部件产生倾斜,也就是说,一个轴(基准轴)由于自身的重量造成下垂,相对于另一个轴(补偿轴)的绝对位置产生了变化。
2、840D下垂补偿功能参数的分析:西门子840D数控系统的补偿功能,其补偿数据不是用机床数据描述,而是以参数变量,通过零件程序形式或通用启动文件(_INI文件) 形式来表达。
数控机床定位精度的补偿方法简述
数控机床定位精度的补偿方法简述由于机械电子技术的飞速发展,数控机床做为一种高精度、高效率、稳定性强的自动化加工装备,已经成为机械行业必不可少的现代化技术装置。
数控机床的定位精度是影响其高精度性能的一个重要方面,因而也是数控机床验收时的一个重要项目。
利用数控系统的螺距误差补偿功能进行调整,可以大大提高数控机床的定位精度,而电气控制系统不同,其定位精度的补偿方法也不尽相同,本文将以FANUC-0系统和SIEMENS-880系统为例,简单介绍数控系统螺距误差补偿的方法。
螺距误差补偿这项工作应该是在机床几何精度(床身水平、平行度、垂直度等)调整完成后进行的,这样可以尽量减少几何精度对定位精度的影响。
另外,进行螺距误差补偿时应使用高精度的检测仪器(如激光干涉仪),这样可以先测量再补偿,补偿后再测量,并按照相应的分析标准(如VDI3441、JIS6330、GB10931-89等)对测量数据进行分析,直到达到机床对定位精度的要求范围。
机床的螺距误差补偿功能包括线性轴和旋转轴两种方式,分别可以对直线轴和旋转工作台的定位精度进行补偿。
但有一点需要注意,就是在补偿旋转轴时应注意:在0°~360°之间各补偿点的补偿值总和应为0,以使0°和360°的绝对位置保持一致,否则旋转轴旋转角度每超过360°一次,就产生一次累积误差,从而影响机床的加工精度。
另外,螺距误差补偿功能的实现方法又有增量型和绝对型之分。
所谓补偿就是指通过特定方法对机床的控制参数进行调整,其参数调整方法也依各数控系统不同而各有差异。
所谓增量型是指以被补偿轴上相领两上补偿点间的误差差值为依据来进行补偿,而绝对型是指以被补偿轴上各个补偿点的绝对误差值为依据来进行补偿。
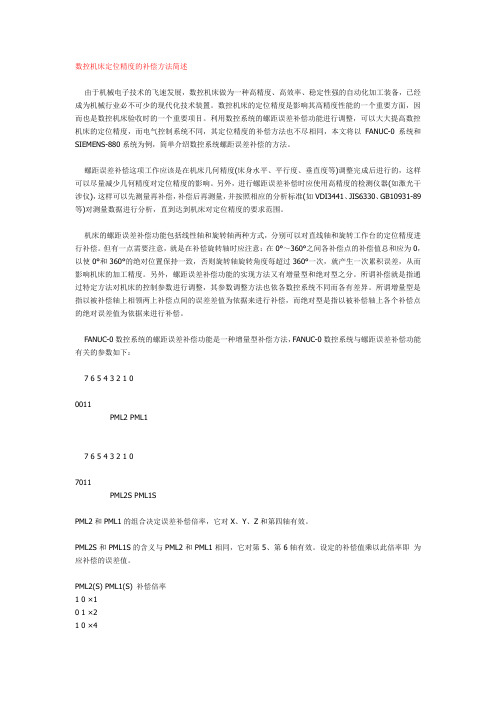
FANUC-0数控系统的螺距误差补偿功能是一种增量型补偿方法,FANUC-0数控系统与螺距误差补偿功能有关的参数如下:7 6 5 4 3 2 1 00011PML2 PML17 6 5 4 3 2 1 07011PML2S PML1SPML2和PML1的组合决定误差补偿倍率,它对X、Y、Z和第四轴有效。
浅谈西门子840D系统螺距补偿在维修中的运用_刘清

收稿日期:2012-10-12 作者简介:刘 清(1977—),男,四川资中人,本科,研究方向为电气自动化。
160
N10 G53G90G17 N20 G00Y=900 N30 G04F6 N40 Y=890 N50 R0=0 N60 AA: N70 Y=IC(-230) N80 G04F6 N90 R0=R0+1 N100 IF R0<20 GOBO AA N110 Y=IC(-10) N120 GO4F6 N130 R1=0 N140 Y=IC(10) N150 G04F6 N160 BB: N170 Y=IC(230) N180 G04F6 N190 R1=R1+1 N200 IF R1<=20 GOBO BB N210 Y=IC(10) N220 M02 当程序编制结束以后,应该试运行一下,看各个 点位和步长是否正确。该程序可以通过外部计算机 编制完成以后上传系统,也可以在系统中直接编制。 如果考虑经常要使用逻辑补偿,那么可以将该程序 存在工系统件程序中,方便以后使用。 (4)在系统中自动生成补偿文件。 自动生成补偿文件过程如下:在系统主界面,点 击服务→移动光标到“NC- 生效 - 数据”→选择测量 系统误差补偿→测量系统误差补偿轴 2 (X 轴为轴 1,Y 轴为轴 2,Z 轴为轴 3)→点击数据管理→复制→ 工件→粘贴。将系统产生的补偿文件传出,在 PC 机 上编辑并输入补偿值,经过编辑,按照需要将编辑过 的补偿文件传入系统[1]。 (5)在这里要用到两个西门子 840D 系统的两个 轴参数。 MD38000 最大补偿点数:修改此参数,会引起 NCK 内存重新分配,会丢失数据,所以要求必须先做 好第二步,备份好机床的重要数据。原则上我们不要 轻易改动这个参数。MD32700 螺距误差补偿:0 为螺 距补偿不生效,允许修改补偿文件,1 为 螺距补偿生 效,不允许修改补偿文件[2]。 (6)将 MD32700 置 0,在 PC 机将补偿文件中的
西门子840D数控系统螺距补偿的探索与实践
$A A _E N C _C O M P 0 ,O,A X I]= 0. 2 [ 04 $A A _E N C 工 O M P ,l,A X I]= 0. 20 0 [ 0
. 2 4 .1
N o lo
N 020 N 030
N ( 牡 ) )
主程序
G 5 4 G 90 G D X 一 10
G4FS XO
定 义 补偿 步
$A A 一 N C _ C O M P M I [ A X I =50 . - N 0 , ] 0 0 点 $A A J N C工 O M P M A X [ , X I 二 50 . 0A ] 10 0 0 偿 终点 $A A E N C _ C O M P IS_ M O D U L [ ,A X I]= O 0 0 功能
$A A _E N C _C O M P 0 ,5,A X I]= 0. 旧 [ (兀 $A A E N C _C O M P 0 ,6,A X I]= 0. [ 仪抖
N 050
X SU B l l
PZI
调用子程 序 X SU B l ,共 调用 l 1 2 次 , 即 X 轴正 向走完 全长 到终 点后 ,再 次越程 10~
然后用 键盘 的光标键选 择 /数 据 , 0, 并选 择其 中的 /丝 杠误差 补偿 0,按 菜单键 /读 出 0 动数据 传输 " 启 5 ) 按 照预 定 的最小 位 置 , 最 大位 置 和测 量 间隔 移 动要进 行补偿 的坐标 " 6 ) 用激光 干涉仪测 试每一 点的误差 " ) 7
% N
西门子 84 D 数控系统螺距补偿的探索与实践 0
赵 阳 卢 宝
泞 夏共享精密加工有限公司,宁夏 银川 7 0 2 ) 5 1
机床的螺距误差补偿方法
1 . 发那科 ( 以F A N UC 0 i — MD 为 例 )
1 . 1 基本概念 1 . 1 . 1 补偿点 的指定 各轴 的补偿点 的指定 , 可通过夹着参考点 的补偿点编号指定( + ) 侧、 f - 1 侧来进行 机 械的行程超过 ( + ) 侧、 ( 一 ) 侧 所指定 的范 围时 , 有关 超出 的范围 , 不进行螺距误差补偿 ( 补偿量全都成为 0 ) 1 . 1 . 2补 偿 点 号 补偿点数 . 在螺距误差设定画面上提供有共计 1 0 2 4 点. 从 0到 1 0 2 3 。通过参数将该编号任意分配给各轴 。 ’ 另外 , 螺距误差设定 画面 中. 在最靠近负侧 的补偿 号前 . 显示该轴 的名称 1 . 1 . 3补偿点 的间隔 螺距误差补偿 的补偿点为等间隔 . 在参数中为每个轴设定该间隔。 螺距误差补偿点 的间隔有最小值限制 . 通过下式确定 。 螺距误差补偿 间隔的昂 小值墁 大进给速度( 快速移动速度 ) + 7 5 0 0 。 1 . 2 相关参数 ( 1 ) 1 8 5 1 每个轴的反向间隙补偿 量
2 . 西门子 ( 以 SI ME N S 8 2 8 D 为例 )
2 . 1 相关参数 ( 1 ) 3 2 4 5 0反 向间隙补偿值 ( 2 ) 3 2 7 0 0 螺距误差补偿生效 注: 以上参数修改后需要复位才可 以生效 2 . 2 操作方法 ( 以V M C 8 5 0 E的 x轴为例 , x轴行程 为 8 5 0 m m, 全 长采集 1 0个数据 ) ( 1 ) 连接激光干涉仪 。 ( 2 ) 1 8 5 2每个轴的快速移动时的反向间隙补偿 量。 ( 2 ) t确设置参数 。 ( 3 ) 3 6 2 0每个轴的参考点的螺距误差补偿点号。 1 ) 将3 2 4 5 0 设置为 O , 确保第一次数据采集时反 向间隙为 0 。 ( 4 ) 3 6 2 1 每个轴的最靠近负侧的螺距误 差补偿 点号 。 2 ) 将3 2 7 0 0设置为 O . 并按下复位键 。 ( 5 ) 3 6 2 2每个轴的最靠近正侧的螺距误 差补偿 点号 3 ) 编辑 补偿文件 , 补偿文件 的存 储位置为 : 菜单选择一 调试一系 ( 6 ) 3 6 2 3每个轴的螺距误差补偿倍率 统数据一N c 数据一N c生效数据一测量 系统误差补偿 编辑后补偿文 ( 7 ) 3 6 2 4每个轴的螺距误差补偿 点间隔 注: 以上参数 中 3 6 2 0 , 3 6 2 1 , 3 6 2 2 , 3 6 2 4 修 改后需要切 断电源并重 件 内容如下 : 新上 电才生效 , 其余参数修改后复位 即可生效 ¥ A A— . E N C — . C O MP [ 0 , 0 , A X1 ] = 0 . 0 0 1 - 3 操作方法 ( 以V M C 8 5 0 E的 x轴 为例 . x轴行程 为 8 5 0 m m. 全 ¥ A A— — E N C — — C O MP [ 0 , 1 , A X1 ] = 0 . 0 0 长采集 2 0个数据 ) ¥ A A— — E N C — — C O MP [ 0 , 2 , A X1 ] = O . O 0 ( 1 ) 连接激光干涉仪 ¥ A A— . E N C — . C O MP [ 0 , 2 9 , A X1 ] = 0 . 0 0 ( 2 ) 设置参数 。 ¥ A A ENC C O MP [ 0 , 3 0 , A XI ] = O . O 0 1 ) 1 8 5 1 , 1 8 5 2 都设置为 0 . 确保第一次数据采集时反 向间隙为 0 。 2 ) 3 6 2 0 设置为 1 . 表示 x轴 的补偿值 以补偿数据表 中的第 1 号为 ¥ A A— E N C — — C O MP _ S T E P [ 0 , A X1 ] = 8 5 参考 点。 ¥ A A— — E N C — — C O MP — — MI N[ 0 , A X1 ] = 0 ¥ A A ENC COMP MA 3 ) 3 6 2 1 设置 为 1 .表示 x轴 的补偿值从 补偿数据表 的第 1 号开 X [ 0 , AX1 ] = 8 5 0
西门子840D数控系统螺距补偿的探索与实践
西门子840D数控系统螺距补偿的探索与实践摘要:由于机械电子技术的飞速发展,数控机床做为一种高精度、高效率、稳定性强的自动化加工装备,已经成为机械行业必不可少的现代化技术装置。
利用数控系统的螺距误差补偿功能进行调整,可以大大提高数控机床的定位精度。
西门子SINUMERIK 840D数控系统是西门子公司最新推出的全闭环数控系统,已经在机械加工行业已经获得了最为广泛的应用。
关键词:数控;加工;高精度;补偿一、背景介绍我公司目前拥有多西门子SINUMERIK 840D系统的数控机床。
日常加工以大型铸钢件为主,工件硬度高,机床消耗和磨损较大,机床精度每过一段时间就会出现偏差。
因此,我们需要定期通过对数控系统进行精度调整,从而保证其有效加工精度。
下面我们以精工工厂GIMAX 180落地镗铣加工中心X轴为例,对螺距误差补偿进行研究与探索。
二、实施过程(一)螺距误差补偿的原理由于机床丝杠在制造、安装和调整等方面的误差,以及磨损等原因,造成机械实际进给值与给定信号值的不一致,导致零件加工精度不稳定。
因此必须定期对机床坐标精度进行补偿。
在补偿的时候,在机床的运行轨道上取若干点,(一般取30个点,取的点越多,补偿精度越高)通过激光干涉仪测得机床的实际定位位置,与设定定位位置进行比较,得出便宜距离,并将其写入补偿文件中。
机床在下次运行时,降会把补偿文件的数据也计算在内。
从而达到精度要求。
(二) 840D补偿功能几个关键机床数据的说明机床在出厂前,需进行螺距误差补偿(LEC)。
螺距误差补偿是按轴进行的,与其有关的轴参数只有两个:(1) MD38000 最大补偿点数。
(2) MD32700 螺距误差使能:0 禁止,可以写补偿值;1 使能,补偿文件写保护并且螺距误差补偿是在该轴返回参考点后才生效的。
(三)补偿的方法(1) 修改MD38000:由于该参数系统初始值为0,故而应根据需要先设此参数。
修改此参数,会引起NCK 内存重新分配,会丢失数据。
西门子螺距误差补偿
西门子螺距误差补偿本期给大家介绍一下西门子系统进行螺距误差补偿的方法和过程。
螺距误差补偿的方法:首先用激光干涉仪测量实际轴各个补偿点的误差,然后将实际测量的螺距误差补偿到系统中,注意西门子系统中的补偿值都是绝对值,即每一个测量点的实际位置与测量值之间的差值。
补偿原理图如下:补偿步骤如下:1.编写一个螺补的测试程序,螺补测试程序举例如下:运行螺补测试程序,按照预定的最小位置、最大位置和测量间隔移动要进行补偿的轴,并用激光干涉仪测试每一点的误差。
2.在系统中找出补偿文件:NC数据-> NC生效数据-> 测量系统误差补偿,将补偿文件复制,粘贴到零件程序中。
注意可以选择需要补偿的轴。
3.打开补偿文件,将误差值填入补偿文件中。
补偿数组的结构:$AA_ENC_COMP[0,0,AX1]= 0.0对应于最小位置上的误差值$AA_ENC_COMP[0,1,AX1]= 0.0对应于最小位置+ 1个间隔位置上的误差值…………$AA_ENC_COMP[0,124,AX1]= 0.0对应于最小位置+ 124个间隔位置上的误差值$AA_ENC_COMP_STEP[0,AX1]=0.0测量间隔 (mm)$AA_ENC_COMP_MIN[0,AX1] =0.0最小位置(机床坐标系)$AA_ENC_COMP_MAX[0,AX1] =0.0最大位置(机床坐标系)$AA_ENC_COMP_IS_MODULO[0,AX1]=0直线轴=0,旋转轴=1注:补偿值应填入每点的绝对补偿值,并将校验码删除。
4.在自动方式下运行AX1_EEC.MPF程序,设定轴参数 MD32700 = 1,然后重启系统,返回参考点后补偿值生效。
运行补偿程序时,MD32700应设为0,否则系统会出现17070号报警。
5.检查补偿值是否生效。
选择在绝对补偿值测量系统1中可以观察到当前点生效的补偿值。
此处的生效补偿值为螺补和反向间隙的叠加值。
注:(1)对于旋转轴,与直线轴的补偿方法是相同的,测量如下图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子螺距误差补偿
本期给大家介绍一下西门子系统进行螺距误差补偿的方法和过程。
螺距误差补偿的方法:
首先用激光干涉仪测量实际轴各个补偿点的误差,然后将实际测量的螺距误差补偿到系统中,注意西门子系统中的补偿值都是绝对值,即每一个测量点的实际位置与测量值之间的差值。
补偿原理图如下:
补偿步骤如下:
1.编写一个螺补的测试程序,螺补测试程序举例如下:
运行螺补测试程序,按照预定的最小位置、最大位置和测量间隔移动要进行补偿的轴,并用激光干涉仪测试每一点的误差。
2.在系统中找出补偿文件:
NC数据 -> NC生效数据 -> 测量系统误差补偿,将补偿文件复制,粘贴到零件程序中。
注意可以选择需要补偿的轴。
注:补偿值应填入每点的绝对补偿值,并将校验码删除。
4.在自动方式下运行AX1_EEC.MPF程序,设定轴参数 MD32700 = 1,然后重启系统,返回参考点后补偿值生效。
运行补偿程序时,MD32700应设为0,否则系统会出现17070号报警。
5.检查补偿值是否生效。
选择
注:
(1)对于旋转轴,与直线轴的补偿方法是相同的,测量如下图。
采用模态来补偿旋转轴时,0与360点可以都不补;采用非模态来补偿旋转轴时,注意一定要在相同的位置补相同的值(如-90度和270度实际是同一位置),否则会影响重复定位精度。
(2)丝杠螺距误差应在驱动优化和圆度测试之后再进行补偿。