ArcGIS应用之基于密度的聚类分析
ArcGIS应用之基于某密度的聚类分析报告

ArcGIS应用之基于密度的聚类分析我们生活在数据大爆炸时代,每时每刻都在产生海量的数据如视频,文本,图像和博客等。
由于数据的类型和大小已经超出了人们传统手工处理的能力围。
聚类,作为一种最常见的无监督学习技术,可以帮助人们给数据自动打标签,已经获得了广泛应用。
聚类的目的就是把不同的数据点按照它们的相似与相异度分割成不同的簇(注意:簇就是把数据划分后的子集),确保每个簇中的数据都是尽可能相似,而不同的簇里的数据尽可能的相异。
从模式识别的角度来讲,聚类就是在发现数据中潜在的模式,帮助人们进行分组归类以达到更好理解数据的分布规律。
今天要跟大家分享的这个工具就跟聚类有关,它是ArcGIS中一个空间模式识别工具——基于密度的聚类分析。
基于密度的聚类工具的工作原理是检测点集中的区域以及被空的或稀疏的区域所分隔的区域。
不属于聚类的点将被标记为噪点。
一、聚类的应用•城市供水网络是一种重要的隐形地下资产。
管道破裂和爆裂的聚类可以指明潜在的问题。
使用基于密度的聚类工具,工程师可以找到这些聚类的位置并对供水网络中的高危区域抢先采取行动。
•假设您拥有NBA 球员所有成功的和失败的投篮位置数据。
基于密度的聚类可以显示每名球员成功与失败投篮位置的不同模式。
然后可利用此信息告知比赛战术。
•假设您正在研究一种特别的害虫传播疾病,并且有一个代表您研究区域家庭的点数据集,其中有些家庭已经被感染,有些家庭尚未被感染。
通过使用基于密度的聚类工具,您可以确定受害家庭的最大聚类,以帮助确定一个区域以开始害虫的处理和消灭。
•可对自然灾害或恐怖袭击之后的地理定位推文进行聚类,根据所确定的聚类大小和位置报告救援和疏散需求。
•聚类可以将大规模的客户数据按照客户喜好进行归类,比如下图1展示了聚类后发现了3个簇。
图1 聚类的应用举例二、功能定义聚类算法很多,包括基于划分的聚类算法(如:k-means),基于层次的聚类算法(如:BIRCH),基于密度的聚类算法(如:DBSCAN),基于网格的聚类算法( 如:STING )等等。
基于地理的聚类方法

基于地理的聚类方法随着信息技术的快速发展,地理信息系统(GIS)在各个领域扮演着越来越重要的角色。
其中,聚类分析是GIS中地理空间数据分析的重要方法之一。
它通过对数据点的相似性进行度量,将属于同一类别的数据点聚集在一起,从而发现地理空间中的规律和关系。
在本文中,我们将着重介绍基于地理的聚类方法。
1.基于密度的聚类密度聚类方法是基于数据点密度的分析方法。
其基本思想是将数据点分布空间中的高密度区域看成一类,而低密度区域则看成另一类。
常见的密度聚类算法有DBSCAN(密度聚类的基础算法)、OPTICS 等算法。
在地理信息领域,该方法可用于提取地形形态、城市几何形态、森林覆盖度等信息。
2.基于网格的聚类网格聚类将地理信息空间分割为一个个网格,并测试每个网格的内容。
网格中心是被聚类的对象,其属性值将被作为网格的模式。
网格聚类的优点是聚类结果具有空间属性和易于解释性。
网格聚类的应用领域包括城市规划、环境管理和森林覆盖等。
3.基于层次聚类层次聚类将数据点看成一棵树,从下到上逐渐合并成一团。
该方法通过不同阈值的设定,把这棵树的分枝划分成不同的类别。
在地理信息领域,该方法可用于划分地形形态、水文地貌等信息。
4.基于特征聚类特征聚类将地理信息中的特征看成一类,通过这些特征的共同性,将这些特征聚类在一起。
特征聚类应用广泛,例如在植被分类、河流图像分割和地形分类等领域。
总结基于地理的聚类方法可以分为四种:基于密度的聚类、基于网格的聚类、基于层次聚类和基于特征聚类。
不同的聚类方法适用于不同的数据类型,所以聚类方法的选择也很关键。
在GIS空间数据分析过程中,通过探索不同聚类方法的优缺点,可以深入理解数据本身,并发现其中具有潜在规律和联系的地理现象,为决策提供有效的支持。
arcgis中的skater算法

arcgis中的skater算法
Skater算法是ArcGIS中的一种空间数据挖掘工具,用于发现
地理空间数据中的模式和趋势。
Skater算法可以帮助用户识别数据
中的空间集群、热点区域等特征。
该算法基于密度的空间聚类方法,通过对数据点周围的密度进行分析,识别出高密度区域和低密度区域。
在ArcGIS中,Skater算法的使用通常包括以下几个步骤:
1. 数据准备,首先需要准备地理空间数据,可以是点、线、面
等要素类型的数据,这些数据应包含有关要分析的现象或事件的位
置信息。
2. 参数设置,在应用Skater算法之前,需要设置一些参数,
如距离阈值、邻域大小等,以便算法能够根据用户的需求进行数据
分析。
3. 运行Skater算法,一旦数据准备和参数设置完成,就可以
在ArcGIS中运行Skater算法,该算法将对数据进行密度分析,并
识别出空间集群和热点区域。
4. 结果展示和分析,最后,用户可以对Skater算法的结果进行展示和分析,通常使用地图、图表等方式来呈现数据的空间分布特征,以便更好地理解数据中存在的模式和趋势。
Skater算法在ArcGIS中的应用可以帮助用户更好地理解地理空间数据的特征和规律,对于城市规划、资源分配、环境监测等领域具有重要的应用意义。
通过对Skater算法的合理运用,可以为决策提供科学依据,促进可持续发展和资源合理利用。
基于GIS的空间聚类算法研究
基于GIS的空间聚类算法研究摘要:随着地理信息系统(GIS)技术的快速发展,越来越多的空间数据被应用于各种领域的研究和决策。
空间聚类算法是一种重要的数据挖掘技术,在GIS领域也得到了广泛的应用。
本文主要探讨了基于GIS的空间聚类算法的研究现状和发展趋势,对当前常用的几种空间聚类算法进行了比较和总结,并对其在不同领域的应用进行了探讨,最后对未来的研究方向提出了展望。
关键词:GIS,空间聚类,数据挖掘技术,研究现状,发展趋势一、引言地理信息系统(GIS)技术是一种将空间数据与属性数据相结合的综合信息处理技术,它已经被广泛应用于城市规划、环境管理、资源监测等领域。
随着大数据时代的到来,越来越多的空间数据被收集和处理,怎样高效地从中挖掘出有用的信息成为了一个热门的研究方向。
空间聚类算法作为一种重要的数据挖掘技术在GIS领域得到了广泛的应用和研究。
二、常用的空间聚类算法1.基于密度的聚类算法基于密度的聚类算法主要通过计算数据点的密度来判断其是否属于一个簇。
其中最著名的算法是DBSCAN(Density-Based Spatial Clustering of Applications with Noise)算法,该算法通过将空间数据点划分为核心点、边界点和噪音点,实现了对不同密度的空间数据点进行聚类。
2.基于网格的聚类算法基于网格的聚类算法主要是将空间数据划分为一系列的网格,然后根据网格中的数据点数量来进行聚类。
其中一种常用的算法是STING (Statistical Information Grid)算法,该算法通过计算每个网格中数据点的均值和标准差来判断其是否属于一个簇。
3.基于层次的聚类算法基于层次的聚类算法主要是通过计算数据点之间的相似性来判断其是否属于一个簇,并将数据点逐级聚合成簇。
其中一种常用的算法是BIRCH (Balanced Iterative Reducing and Clustering using Hierarchies)算法,该算法通过构建一棵多叉树来实现对空间数据点的层次聚类。
arcgis pro 聚类方法

arcgis pro 聚类方法ArcGIS Pro是一款功能强大的地理信息系统软件,其中包含了许多聚类方法,用于处理和分析空间数据。
本文将介绍ArcGIS Pro中常用的聚类方法,包括K均值聚类、DBSCAN聚类和层次聚类,以及它们的应用场景和使用方法。
一、K均值聚类K均值聚类是一种常用的聚类方法,它将数据集划分为K个簇,使得每个样本点都属于离其最近的簇。
在ArcGIS Pro中,可以通过K 均值聚类工具来实现这一功能。
用户需要指定簇的数量K,然后根据数据集的特征进行聚类分析。
K均值聚类适用于数据点分布比较均匀的情况,例如对城市人口进行聚类分析,将人口分为不同的群体。
二、DBSCAN聚类DBSCAN(Density-Based Spatial Clustering of Applications with Noise)聚类是一种基于密度的聚类方法,它将数据集划分为若干个密度相连的簇。
在ArcGIS Pro中,可以通过DBSCAN聚类工具来实现这一功能。
用户需要指定邻域半径和邻域中最小样本点数,然后根据数据点的密度进行聚类分析。
DBSCAN聚类适用于数据点分布不均匀的情况,例如对地震数据进行聚类分析,将地震点划分为不同的震源群。
三、层次聚类层次聚类是一种自下而上的聚类方法,它将数据集中的每个样本点看作一个初始簇,然后通过计算相似度来合并簇,最终形成一个层次结构。
在ArcGIS Pro中,可以通过层次聚类工具来实现这一功能。
用户可以选择不同的相似度度量方法和合并策略,根据数据集的特征进行聚类分析。
层次聚类适用于数据点之间具有明显层次结构的情况,例如对植被类型进行聚类分析,将不同的植被形成层次结构。
四、聚类方法的应用场景聚类方法在地理信息系统中有着广泛的应用。
例如,在城市规划中,可以利用K均值聚类方法对城市人口进行聚类分析,以便制定相应的规划和发展策略。
在环境监测中,可以利用DBSCAN聚类方法对污染点进行聚类分析,以便确定污染源和采取相应的治理措施。
基于密度方法的聚类讲课文档

第二十二页,共61页。
DBSCAN聚类过程
➢ 第4步,在数据库中选择一点4,由于在以它为圆心的,以1为半径的圆内 包含5个点,因此它是核心点,寻找从它出发可达的点(直接可达4个, 间接可达3个),聚出的新类{1,3,4,5,9,10,12},选择下一个点。
➢ 4. ELSE 抽出的点是边缘点(非核心对象),跳出本次循环,寻找下一点; ➢ 5. UNTIL 所有点都被处理;
第十九页,共61页。
DBSCAN算法步骤
输入:数据集D,参数MinPts, ε 输出:簇集合
(1) 首先将数据集D中的所有对象标记unvisited ;
(2) do (3) 从D中随机选取一个unvisited对象p,并将p标记为visited ;
3. 重新计算每个(有变化)聚类的均值(中心对象); 4. 计算标准测度函数,当满足一定条件,如函数收敛时,则算法终止;如果条件不满
足则回到步骤2。
第六页,共61页。
k-means优缺点
➢ 主要优点:
是解决聚类问题的一种经典算法,简单、快速。 对处理大数据集,该算法是相对可伸缩和高效率的。 当结果簇是密集的,它的效果较好。 ➢ 主要缺点 在簇的平均值被定义的情况下才能使用。
第十八页,共61页。
基于密度方法的聚类- DBSCAN
DBSCAN算法描述: ➢ 输入:包含n个对象的数据库,半径ε,最少数目MinPts。
➢ 输出:所有生成的簇,达到密度要求。
➢ 1. REPEAT
➢ 2. 从数据库中抽取一个未处理过的点;
➢ 3. IF 抽出的点是核心点 THEN找出所有从该点密度可达的对象,形成一个簇
第二十五页,共61页。
ArcGIS进阶_密度分析
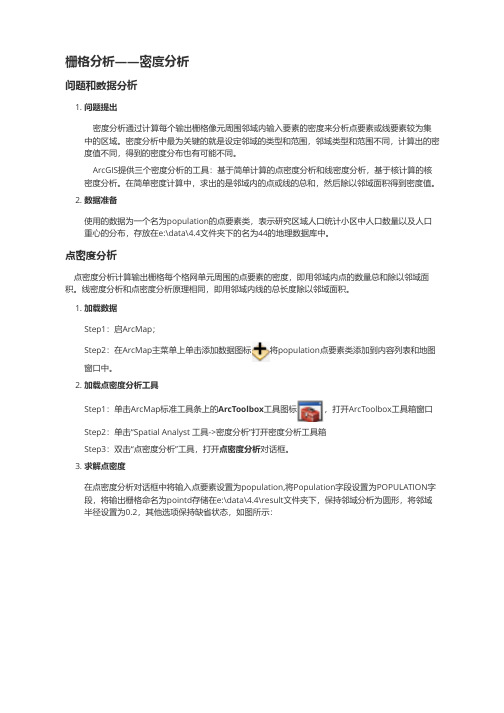
栅格分析——密度分析问题和数据分析1. 问题提出密度分析通过计算每个输出栅格像元周围邻域内输入要素的密度来分析点要素或线要素较为集中的区域。
密度分析中最为关键的就是设定邻域的类型和范围,邻域类型和范围不同,计算出的密度值不同,得到的密度分布也有可能不同。
ArcGIS提供三个密度分析的工具:基于简单计算的点密度分析和线密度分析,基于核计算的核密度分析。
在简单密度计算中,求出的是邻域内的点或线的总和,然后除以邻域面积得到密度值。
2. 数据准备使用的数据为一个名为population的点要素类,表示研究区域人口统计小区中人口数量以及人口重心的分布,存放在e:\data\4.4文件夹下的名为44的地理数据库中。
点密度分析点密度分析计算输出栅格每个格网单元周围的点要素的密度,即用邻域内点的数量总和除以邻域面积。
线密度分析和点密度分析原理相同,即用邻域内线的总长度除以邻域面积。
1. 加载数据Step1:启ArcMap;Step2:在ArcMap主菜单上单击添加数据图标将population点要素类添加到内容列表和地图窗口中。
2. 加载点密度分析工具Step1:单击ArcMap标准工具条上的ArcToolbox工具图标,打开ArcToolbox工具箱窗口Step2:单击“Spatial Analyst 工具->密度分析”打开密度分析工具箱Step3:双击“点密度分析”工具,打开点密度分析对话框。
3. 求解点密度在点密度分析对话框中将输入点要素设置为population,将Population字段设置为POPULATION字段,将输出栅格命名为pointd存储在e:\data\4.4\result文件夹下,保持邻域分析为圆形,将邻域半径设置为0.2,其他选项保持缺省状态,如图所示:单击确定按钮。
求解的点密度栅格如图所示:在点密度分析对话框中,Population字段相当于一个权重,表示每项的值用于确定点被计数的次数。
09GIS-计-10-聚类-判别分析

n
k 1
x x
2 ik k 1 k 1
n
n
2 jk
样品
(i, j 1,2,,m)
2
dij
d ij
P
( xik x jk )
k 1
n
n
(i, j 1,2,,m)
明科夫斯基距离
| x
k 1
ik
x jk |
p
(i, j 1,2,,m) (i, j 1,2,,m)
标识变量框 聚类类型
Q型 显示统计量值
R型
显示内容
显示图形
显示 统计量值
显示图形
聚类方法
保存 新变量
3)Statistics按钮/统计量对话框…或采用默认值
聚类进度(表) 相似性矩阵(距离) 样品隶属类 不输出 可选 隶属第n类的表 输出第n~m类的隶属表
4)Ptots按钮/弹出图形对话框……或按默认
龙骨图(谱系图) 冰柱图 全部样品冰柱图 指定样品冰柱图 不显示冰柱图 冰柱图的方向
5)Method按钮/聚类方法对话框
——设置聚类方法和测度方法等
聚类方法 测度方法 最远距离法 欧氏距离
间隔测度连续数据
频数计数变量 二态变量
标准差为1的标准化 数据变换 对变量 对样品
聚类方法
组间连接法 组内连接法 最近距离法 最远距离法 重心法 中位数法 最小偏差平方和法
d(10, 1)=
Min[d(4,1),d(9,1)]=2.19
Max[d(4,1),d(9,1)]=2.19 Min[d(4,3),d(9,3)]=1.20 Max[d(4,3),d(9,3)]=1.23
d(10, 2)=
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ArcGIS应用之基于密度的聚类分析我们生活在数据大爆炸时代,每时每刻都在产生海量的数据如视频,文本,图像和博客等。
由于数据的类型和大小已经超出了人们传统手工处理的能力范围。
聚类,作为一种最常见的无监督学习技术,可以帮助人们给数据自动打标签,已经获得了广泛应用。
聚类的目的就是把不同的数据点按照它们的相似与相异度分割成不同的簇(注意:簇就是把数据划分后的子集),确保每个簇中的数据都是尽可能相似,而不同的簇里的数据尽可能的相异。
从模式识别的角度来讲,聚类就是在发现数据中潜在的模式,帮助人们进行分组归类以达到更好理解数据的分布规律。
今天要跟大家分享的这个工具就跟聚类有关,它是ArcGIS中一个空间模式识别工具——基于密度的聚类分析。
基于密度的聚类工具的工作原理是检测点集中的区域以及被空的或稀疏的区域所分隔的区域。
不属于聚类的点将被标记为噪点。
一、聚类的应用•城市供水网络是一种重要的隐形地下资产。
管道破裂和爆裂的聚类可以指明潜在的问题。
使用基于密度的聚类工具,工程师可以找到这些聚类的位置并对供水网络中的高危区域抢先采取行动。
•假设您拥有NBA 球员所有成功的和失败的投篮位置数据。
基于密度的聚类可以显示每名球员成功与失败投篮位置的不同模式。
然后可利用此信息告知比赛战术。
•假设您正在研究一种特别的害虫传播疾病,并且有一个代表您研究区域内家庭的点数据集,其中有些家庭已经被感染,有些家庭尚未被感染。
通过使用基于密度的聚类工具,您可以确定受害家庭的最大聚类,以帮助确定一个区域以开始害虫的处理和消灭。
•可对自然灾害或恐怖袭击之后的地理定位推文进行聚类,根据所确定的聚类大小和位置报告救援和疏散需求。
•聚类可以将大规模的客户数据按照客户喜好进行归类,比如下图1展示了聚类后发现了3个簇。
图1 聚类的应用举例二、功能定义聚类算法很多,包括基于划分的聚类算法(如:k-means),基于层次的聚类算法(如:BIRCH),基于密度的聚类算法(如:DBSCAN),基于网格的聚类算法( 如:STING )等等。
本文将介绍聚类中一种最常用的方法——基于密度的聚类方法(density-based clustering)。
这个工具的核心功能是检测点数据集中集聚区域和被空的或稀疏区域所分隔的区域。
这个工具使用了非监督的机器学习聚类算法,这个算法并不需要预先针对聚类进行训练,仅根据空间位置和到指定邻域的距离通过最小聚类点数作为约束自动检测模式。
详细的算法原理请参阅后面的原理分析部分。
三、使用工具步骤可能大家一听到“非监督机器学习”,瞬间就会觉得这是个很难使用的工具,事实上这个工具恰恰非常简单易用,如图2所示。
输入和输出都很明确,也非常易于理解。
图2 非监督机器学习的过程3.1输入参数1.设置点图层,在大数据分析工具中,这个点图层的空间参考要求是投影坐标系的,如果数据本身不是,那可以通过设置环境变量中的工具处理空间参考为投影坐标系,比如3857,来实现动态投影;2.设置最小点数,这个值可以理解为最少多少个点可以被考虑为一个聚类,分析区内如果点数低于这个值,说明密度低于临界值,过于稀疏,反之,这些点可以组成一个聚类;3.设置搜索半径,这个值用于创建分析邻域,以分析点为中心,这个值为半径,就可以缓冲一个圆,这个圆就可以用来判断中心点是否属于哪个聚类或是噪点;4.设置输出图层名;5.选择是否仅分析当前地图范围的要素。
3.2分析过程从输入参数和输出结果来判断,GA工具中的点聚类工具,后面对应的算法应该是DBSCAN, 后面我还会细说这个算法,在这儿先大概描述下工具背后执行的逻辑:1.针对待分析点先按照搜索半径生成缓冲区;2.查询缓冲区范围内覆盖的点;3.如果点数> 最小点数,就标识中心点属于某个聚类ID,然后再针对上面搜索到的点执行buffer创建,根据判断条件标识聚类ID;4.如果点数< 最小点数,就标识为噪点,重新跳回起点,分析下一个点;按上面的循环迭代后,每个点都会被判断为属于某个聚类,或者是噪点。
3.3 输出结果这个工具的执行,输出结果非常明确,所有点要素会被区分为噪点或者某一聚类,至于结果输出多少类,完全取决于算法对数据的探索,当然约束条件就是搜索半径和最小点数。
1.输出结果图层和输入点层的记录数完全一致2.输出结果图层会增加CLUSTER_ID, COLOR_ID两个新字段,一个代表分类,一个代表渲染ID。
图3 使用工具操作结果说明:为何不直接使用CLUSTER_ID作为渲染字段?因为如果输出的聚类过多,使用过多的颜色渲染,反而会降低辨识度,因此默认最大选择8种颜色来循环渲染聚类,噪点使用灰色的小点来单独表达。
四、算法原理分析DBSCAN 于1996年由Martin Ester, Hans-Peter Kriegel, Jörg Sander and Xiaowei Xu四个人最早提出,核心的思想是通过计算邻域内点的密度,将距离近的点组成类,密度稀疏的点标注为噪点。
DBSCAN可以说是最常用高效的聚类算法。
这个算法的核心输入是两个约束:最小聚类点数和搜索距离。
DBSCAN会针对要素点集合中的每个点(判断目标点或核心点),根据搜索距离创建一个邻域,对于GISer来说可以想象针对一个点按照搜索距离创建一个buffer, 通过这个buffer可以搜索出落入的所有点要素.,进一步就可以计算出这个邻域密度:coreP_density = 邻域内点数(包含中心点)/ 邻域面积如何判断这个密度是稠密还是稀疏?显然还需要一个判断标准,这个标准就取决于最小点数密度:minP_density = 最小点数/ 邻域面积注意:这个minP_density实际是个常数,因为对于DBSCAN算法来说,邻域面积都是相同的,最小点数也是固定的。
DBSCAN的核心思想就是比较这两个密度,如果核心点所在邻域的密度>临界密度,就创建聚类,或分配到某个已经存在的聚类,反之就标注为稀疏点。
对于算法程序来说,有个取巧的办法,既然邻域面积相同,事实上直接比较点数就可以了,这样计算更快。
再通过下面的图,直观的来理解下DBSCAN聚类的方法:图4 DBSCAN算法原理在这个例子中,最小点数为4,圆环代表邻域:•假设A点是我们选取的随机起算点,那么以A点为中心,邻域距离为半径绘制的缓冲区中,包含了4个点,这个区域的密度超过最小临界密度,可以构成一个聚类。
然后依次判断邻域内的其它三个点,以每个点为中心,绘制缓冲区,再判断每个区域的密度,上图中A点到它邻域内的其它三个点均相互可达,他们属于同一个聚类。
按照这样的规则,想像不断生长的密度气泡,就可以把空间距离较近的点链接起来,形成密度区,图中红色点代表相互可达的核心点,属于同一个聚类。
•B和C点为黄色,它们是边界点,聚类中的E点到C点可达,说明C点离该聚类不远,归属该聚类,但是以C点为核心,邻域内的点数仅为1,已经低于临界密度,所以C点又是个边界点,意味着C之外的点需要开启新的聚类或者因为过于稀疏,成为噪点。
•再看蓝色N点,以N点为中心,邻域内没有其它点到N点可达,从N点也无法到达任何点,说明N点所在区域密度过于稀疏,该点标识为噪点。
由于DBSCAN是靠不断连接邻域内高密度点来发现簇的,只需要定义邻域大小和密度阈值,因此可以发现不同形状,不同大小的簇。
下图展示了一个二维空间的DBSCAN聚类结果。
图5 二维DBSCAN算法聚类结果由于DBSCAN使用的是全局的密度阈值MinPts, 因此只能发现密度不少于MinPts的点组成的簇,即很难发现不同密度的簇。
其成功与失败的情况举例如下:图6 不同密度阈值下聚类结果左图有三个簇,一个全局密度阈值可以把三个簇分开。
但在右图中,一个阈值无法把三个簇分开,过高的阈值会把C3全部变成异常点,过低的阈值会把C1和C2合并起来。
为了解决其发现不同密度的簇,目前已经有很多新的方法被发明出来,比如OPTICS (ordering points to identify the clustering structure)将邻域点按照密度大小进行排序,再用可视化的方法来发现不同密度的簇,如下图所示。
OPTICS将数据以密度的形式排序并展示,不同山谷就是不同密度大小的簇。
图7 二维DBSCAN算法聚类结果OPTICS将数据以密度的形式排序并展示,不同的山谷就是不同密度大小的簇。
五、讨论基于密度的聚类是一种非常直观的聚类方法,即把临近的密度高的区域练成一片形成簇。
该方法可以找到各种大小各种形状的簇,并且具有一定的抗噪音特性。
在日常应用中,可以用不同的索引方法或用基于网格的方法来加速密度估计,提高聚类的速度。
六、参考资料1.Aggarwal, C. C., & Reddy, C. K. (Eds.). (2013). Data clustering: algorithms and applications.CRC press.2.Ankerst, M., Breunig, M. M., Kriegel, H. P., & Sander, J. (1999, June). OPTICS: orderingpoints to identify the clustering structure. In ACM Sigmod record (V ol. 28, No. 2, pp. 49-60).ACM.3.Ester, M., Kriegel, H. P., Sander, J., & Xu, X. (1996, August). A density-based algorithm fordiscovering clusters in large spatial databases with noise. In SIGKDD (V ol. 96, No. 34, pp.226-231).4.Han, J., Pei, J., & Kamber, M. (2011).Data mining: concepts and techniques. Elsevier.。