几何不变体系组成规则.
合集下载
结构力学 2几何组成分析
II
解: 三刚片三铰相连,三铰不共线,所以该体系 三刚片三铰相连,三铰不共线, 为无多余约束的几何不变体系. 为无多余约束的几何不变体系.
三刚片虚铰在无穷远处的讨论
一个虚铰在无穷远
一个虚铰在无穷远: 一个虚铰在无穷远:若组成此虚铰的二杆与另两铰的连 线不平行则几何不变;否则几何可变. 线不平行则几何不变;否则几何可变
例1: 对图示体系作几何组成分析
I II
III
解: 三刚片三铰相连,三铰不共线,所以该体 三刚片三铰相连,三铰不共线, 系为无多余约束的几何不变体系. 系为无多余约束的几何不变体系.
例2: 对图示体系作几何组成分析Байду номын сангаас
I
II
III
主从结构, 主从结构,顺序安装
例3: 对图示体系作几何组成分析
I III
FAy 如何求支 座反力? 座反力 静定结构
FB 无多余 联系几何 不变。 不变。
例1:如何通过减约束变成静定? 1:如何通过减约束变成静定 如何通过减约束变成静定?
或
或
还有其他可能吗? 还有其他可能吗?
结论与讨论
结构的组装顺序和受力分析次序密切相关。 结构的组装顺序和受力分析次序密切相关。 正确区分静定、超静定,正确判定超静定结 构的多余约束数十分重要。 超静定结构可通过合理地减少多余约束使其 变成静定结构。 变成静定结构。 分析一个体系可变性时,应注意刚体形状可 任意改换。按照找大刚体(或刚片)、减二元 任意改换。按照找大刚体(或刚片)、减二元 体、去支座分析内部可变性等,使体系得到最 大限度简化后,再应用三角形规则分析。 大限度简化后,再应用三角形规则分析。
彼此等长 →常变
彼此不等长 →瞬变
结构力学之平面体系的几何组成分析 ppt课件

B
书写:二元体A-C-B。
PPT课件
22
(二)二元体规则: 增加或去掉二元体不改变原体系的几何 组成性质。
C
A
B
PPT课件
23
例五、 分析图示体系的几何构造:
解:
A
B
D
E
基本铰结三角形ABC符合 三刚片规则,是无多余约
G
C
F
束的几何不变体系;依次
在其上增加二元体A-D-C、 C-E-D、C-F-E、E-G-F后, 体系仍为几何不变体,且 无多余约束。
一、几何构造特性: (一)无多余联系的几何不变体系称为静定 结构。
PPT课件
40
静定结构几何组成的特点是:
任意取消一个约束,体系就变成了 几何可变体系。
PPT课件
41
(二)有多余联系的几何不变体系称为超静 定结构。
特点: 某些约束撤除以后,剩余体系仍
为几何不变体系。
PPT课件
42
二、静力特性: (一)静定结构: 在荷载作用下,可以依据 三个静力平衡条件确定全 部支座反力和内力,且解 答唯一。
用
表示。
几何不变部分
刚片
PPT课件
5
三、自由度:
确定体系位置所需要的独立坐标数目。
点:
y
2
y
o
A( x, y )
平面内点的自由度为
2
PPT课件
x
x
6
刚片:
平面内刚片的自由度为
3
y
( x, y )
y
o
A
3
x
x
PPT课件
7
四、约束(联系): 减少自由度的装置。
清华大学结构力学第2章几何构造分析34

II
17
5. 关于无穷远瞬铰的情况
1 C II
I A
2
a)
B
III
一个瞬铰C在无穷远处,铰A、B连线与形成 瞬铰的链杆1、2不平行,故三个铰不在同一直 线上,该体系几何不变且无多余约束(图a)。
18
A B
I II C
b)
III 瞬铰B、C在两个不同方向的无穷远处,它 们对应于无穷线上两个不同的点,铰A位于 有限点。由于有限点不在无穷线上,故三铰 不共线,体系为几何不变且无多余约束(见 图b)。
一、复杂链杆与复杂铰
1. 简单链杆与复杂链杆 简单链杆——仅连接两个结点的链杆称为简
单链杆,一根简单链杆相当于一个约束。
复杂链杆——连接三个或三个以上结点的链杆
称为复杂链杆。一根复杂链杆相当于(2n-3) 根简单链杆,其中n为一根链杆连接的结点数。
35
2. 简单铰与复杂铰 简单铰——只与两个刚片连接的铰称为简单铰。
19
A I II
c)
B III C
形成瞬铰B、C的四根链杆相互平行(不等 长),故铰B、C在同一无穷远点,所以三个 铰A、 B、C位于同一直线上,故体系为瞬变 体系(见图c)。
20
6. 装配格式和装配过程
基本装配(建造、施工)格式
把一个节点固定到一个刚片上;
把一个刚片固定到另一个刚片上;
把两个刚片固定到另一个刚片上。
9
3
I
解: 用混合公式计算。 m=1 j=5 g=2 b=10
W (3 1 2 5) (3 2 10)
13 16 3
41
例2-3-5 求图示体系的计算自由度。
1 2 4 A 3 B 5 6 E 7 C 8 D 10 11
17
5. 关于无穷远瞬铰的情况
1 C II
I A
2
a)
B
III
一个瞬铰C在无穷远处,铰A、B连线与形成 瞬铰的链杆1、2不平行,故三个铰不在同一直 线上,该体系几何不变且无多余约束(图a)。
18
A B
I II C
b)
III 瞬铰B、C在两个不同方向的无穷远处,它 们对应于无穷线上两个不同的点,铰A位于 有限点。由于有限点不在无穷线上,故三铰 不共线,体系为几何不变且无多余约束(见 图b)。
一、复杂链杆与复杂铰
1. 简单链杆与复杂链杆 简单链杆——仅连接两个结点的链杆称为简
单链杆,一根简单链杆相当于一个约束。
复杂链杆——连接三个或三个以上结点的链杆
称为复杂链杆。一根复杂链杆相当于(2n-3) 根简单链杆,其中n为一根链杆连接的结点数。
35
2. 简单铰与复杂铰 简单铰——只与两个刚片连接的铰称为简单铰。
19
A I II
c)
B III C
形成瞬铰B、C的四根链杆相互平行(不等 长),故铰B、C在同一无穷远点,所以三个 铰A、 B、C位于同一直线上,故体系为瞬变 体系(见图c)。
20
6. 装配格式和装配过程
基本装配(建造、施工)格式
把一个节点固定到一个刚片上;
把一个刚片固定到另一个刚片上;
把两个刚片固定到另一个刚片上。
9
3
I
解: 用混合公式计算。 m=1 j=5 g=2 b=10
W (3 1 2 5) (3 2 10)
13 16 3
41
例2-3-5 求图示体系的计算自由度。
1 2 4 A 3 B 5 6 E 7 C 8 D 10 11
[精品]平面体系的几何组成分析
![[精品]平面体系的几何组成分析](https://img.taocdn.com/s3/m/dfa18f6dbf1e650e52ea551810a6f524ccbfcb80.png)
三、点、刚片、结构的自由度
四、约束(联系)
1、约束:凡能减少自由度的装置。
2、一根链杆相当于一个约束(图3)。
y
o
x
(图3)
y
o
x
x
y
3、一个简单铰相当于两个约束(图4)。
y
o
x
(图4)
y
o
x
x
y
4、联结n个刚片的复铰相当于(n-1)个简单铰,减少(n-1)×2个约束(图5)。
(图5)
F
A
B
C
实饺:几何可变
虚饺:几何瞬变
2、三根链杆相互平行
实饺
虚饺
三饺共线(瞬变)
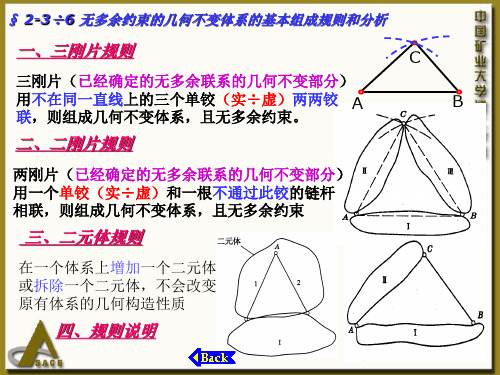
三个刚片上用不在同一直线上的三个铰两两相联结,形成无多余约束的几何不变体系。
三、三个刚片间的联结(规则三):
第四节 几何组成分析的方法、步骤和举例
一、方法 一般先考察体系的计算自由度,若W0,则体系为几何可变,不必进行 几何组成分析;若W0,则应进行几何组成分析。
三、举例
例题1
结论: 无多余约束几何不变体系
第五节 体系几何组成与静定性的关系
一、几何可变体系 一般无静力解答。
二、无多余联系的几何不变体系 静力解答唯一确定。
三、几何瞬变体系 其平衡方程或者没有有限值解答,或在特殊情况下,解答不确定。
四、具有多余联系的几何不变体系 静力解答有无穷多组解。
二、两个刚片之间的联结(规则二):
两个刚片上用一个铰和一根不通过此铰的一根链杆相连结,形成无多余约束的几何不变体系(或:两个刚片上用三根不交于一点、也不全平行的三根链杆相连结 ,形成无多余约束的几何不变体系)。
特殊情况: 1、三根链杆交于一点
四、约束(联系)
1、约束:凡能减少自由度的装置。
2、一根链杆相当于一个约束(图3)。
y
o
x
(图3)
y
o
x
x
y
3、一个简单铰相当于两个约束(图4)。
y
o
x
(图4)
y
o
x
x
y
4、联结n个刚片的复铰相当于(n-1)个简单铰,减少(n-1)×2个约束(图5)。
(图5)
F
A
B
C
实饺:几何可变
虚饺:几何瞬变
2、三根链杆相互平行
实饺
虚饺
三饺共线(瞬变)
三个刚片上用不在同一直线上的三个铰两两相联结,形成无多余约束的几何不变体系。
三、三个刚片间的联结(规则三):
第四节 几何组成分析的方法、步骤和举例
一、方法 一般先考察体系的计算自由度,若W0,则体系为几何可变,不必进行 几何组成分析;若W0,则应进行几何组成分析。
三、举例
例题1
结论: 无多余约束几何不变体系
第五节 体系几何组成与静定性的关系
一、几何可变体系 一般无静力解答。
二、无多余联系的几何不变体系 静力解答唯一确定。
三、几何瞬变体系 其平衡方程或者没有有限值解答,或在特殊情况下,解答不确定。
四、具有多余联系的几何不变体系 静力解答有无穷多组解。
二、两个刚片之间的联结(规则二):
两个刚片上用一个铰和一根不通过此铰的一根链杆相连结,形成无多余约束的几何不变体系(或:两个刚片上用三根不交于一点、也不全平行的三根链杆相连结 ,形成无多余约束的几何不变体系)。
特殊情况: 1、三根链杆交于一点
几何不变体系的简单组成规则

几何不变体系的简单组成规则
几何不变体系是指一类具有几何性质不变的变换组合,其组成规则可以简化为以下几点:
1. 平移不变性:任何平移对几何体的性质不产生变化。
平移是指将几何体的每个点沿着同一方向移动相同距离而保持原始形状不变。
2. 旋转不变性:任何旋转对几何体的性质不产生变化。
旋转是指将几何体绕着一个固定的点旋转一定角度而保持原始形状不变。
3. 缩放不变性:任何等比例的缩放对几何体的性质不产生变化。
缩放是指将几何体的每个点按照相同比例放大或缩小而保持原始形状不变。
4. 对合不变性:任何对合操作下几何体的性质不产生变化。
对合是指对几何体的两个操作进行反向操作,如顺时针旋转和逆时针旋转。
5. 反射不变性:任何对称操作不改变几何体的性质。
反射是指将几何体沿着一个对称轴折叠而保持原始形状不变。
根据这些规则,可以构建一系列几何变换操作,通过不同的变换组合来产生不同的几何不变体系。
这些简单的规则可以用来描述和理解许多几何问题和模式。
无多余约束的平面杆件体系的几何组成规律
3、三规则说明了组成无多余联系的几何不变体系所需的最少联系。 如在这些必要联系的基础上再增加联系,增加的联系为多余联系, 成为超静定结构。 如若刚片之间的联系少于三个规则所要求的数目,肯定几何可变。
(2)两刚片之间用全交于一实铰的三链杆相连, 几何可变。 (3)两刚片之间用全交于一虚铰的三链杆相连 (延长线交于一点),几何瞬变。 (4)两刚片之间用三根平行但不等长的链杆相连, 瞬变体系。 (5)两刚片之间用三根平行且等长的链杆相连, 可变体系。 (6)三刚片用位于同一直线上的三个单铰(实铰 或虚铰)两两相连,瞬变体系。 4 虚铰在无穷远 (1)一个单铰虚铰在无穷远处 (2)两个单铰虚铰在无穷远处 (3)三个单铰虚铰都在无穷远处
(2)两铰在无穷远处
三刚片用三铰相联结中的两个虚铰在无限远处,
当形成两个虚铰的两对平行链杆互不平行几何不变体系; 当形成两个虚铰的两对平行链杆互相平行几何瞬变体系; 当形成两个虚铰的两对平行链杆平行且等长几何常变体系
(3)三铰在无穷远处
三刚片用三单铰相联结中的三个虚铰均在无限远处时
用不同方向的三对平行链杆两两相联,均为瞬变体系 若三对平行链杆各自等长,则为几何常变体系(每对链杆都是从 每一刚片的同侧方向联出的情况)。 若三对平行链杆各自等长,则为几何瞬变体系(平行链杆中有 从刚片的异侧方向联出的情况)。
规则:三刚片(本身无多余联系)、三单铰(实铰或虚铰)、 两两相连、不成一线 一个单铰(实、虚)等价于两根链杆
变化:1个单铰(实÷虚)= 二链杆。一、两、三虚铰
刚片=单个构件÷已经确定的无多余联系的几何不变部分
三个规则的相通性,同一题目,不同方法,结论唯一,所以 思路一定要灵活。结合一个题目?
依据这三个原则,就可以判别一个平面体系是否几何不变体 系。几何不变体系的组成肯定满足这三条原则(全部和部 分)。先基本规则、再推论分析
(2)两刚片之间用全交于一实铰的三链杆相连, 几何可变。 (3)两刚片之间用全交于一虚铰的三链杆相连 (延长线交于一点),几何瞬变。 (4)两刚片之间用三根平行但不等长的链杆相连, 瞬变体系。 (5)两刚片之间用三根平行且等长的链杆相连, 可变体系。 (6)三刚片用位于同一直线上的三个单铰(实铰 或虚铰)两两相连,瞬变体系。 4 虚铰在无穷远 (1)一个单铰虚铰在无穷远处 (2)两个单铰虚铰在无穷远处 (3)三个单铰虚铰都在无穷远处
(2)两铰在无穷远处
三刚片用三铰相联结中的两个虚铰在无限远处,
当形成两个虚铰的两对平行链杆互不平行几何不变体系; 当形成两个虚铰的两对平行链杆互相平行几何瞬变体系; 当形成两个虚铰的两对平行链杆平行且等长几何常变体系
(3)三铰在无穷远处
三刚片用三单铰相联结中的三个虚铰均在无限远处时
用不同方向的三对平行链杆两两相联,均为瞬变体系 若三对平行链杆各自等长,则为几何常变体系(每对链杆都是从 每一刚片的同侧方向联出的情况)。 若三对平行链杆各自等长,则为几何瞬变体系(平行链杆中有 从刚片的异侧方向联出的情况)。
规则:三刚片(本身无多余联系)、三单铰(实铰或虚铰)、 两两相连、不成一线 一个单铰(实、虚)等价于两根链杆
变化:1个单铰(实÷虚)= 二链杆。一、两、三虚铰
刚片=单个构件÷已经确定的无多余联系的几何不变部分
三个规则的相通性,同一题目,不同方法,结论唯一,所以 思路一定要灵活。结合一个题目?
依据这三个原则,就可以判别一个平面体系是否几何不变体 系。几何不变体系的组成肯定满足这三条原则(全部和部 分)。先基本规则、再推论分析
结构力学前半部分重点复习
M F Q F N — 单位力作用下结构产生的弯矩
剪力、轴力
(1)梁和刚架,轴向变形和剪切变形的影响甚小,主要
考虑弯曲变形的影响,位移公式: MMP dx EI (2)桁架,只考虑轴向变形的影响,且每根杆件的内力 及截面都沿杆长不变,故位移公式: F N FNP F N FNP l dx EA EA
结点法和截面法联合运用: 有的杆件用结点法求,有的杆件用截
面法求。
判断零杆:桁架中的某些杆件可能是零杆,计算前 应先进行零杆的判断,这样可以简化计算。零杆判 断的方法:
FN1
不共线的两杆结点,当无 ▲ 两杆节点:
荷载作用时,则两杆内力为FN1=FN2=0。 由三杆构成的结点,有两杆 ▲ 三杆节点:
平面体系的几何组成分析
1. 基本概念: 几何不变体系、几何可变体系、瞬变体系、自由度、 约束 2. 几何不变体系的组成规律 3.灵活运用组成规律分析体系的几何不变性
几何不变体系:不考虑材料的应变,在任意荷
载作用下,几何形状和位置保持不变的体系。 几何可变体系: 不考虑材料的应变,在微小荷 载作用下,不能保持原有几何形状和位置的体 系。
规律 2
三刚片的组成规则:
将链杆看 成刚片
规律 3
三刚片用不在同一直线上的三个铰两两相联, 则组成的体系是几何不变体系且无多余约束。
两根链杆组成 的虚铰替换铰
二元体规则:
二元体的概念:由两根不共线的链杆联结一 个新结点的装置称为二元体。
二元体
去掉二元体 增加二元体
规律 4
在一个体系上,增加或去掉二元体,体系的 几何组成不变。
FP3
f
B
xk
L1 L
2.2平面几何不变体系的组成规律 结构力学

(瞬铰)
二、三刚片规则
三个刚片相连
用不在一条直线上的三个铰两两相连。
将支链杆 看成刚片
三、二元体规则
在一个刚片上增加一个二元体仍为几何不变体系。
二元体
由两根不共线的链杆连接一个 新结点的装置。
(简单装配格式)
▲推广:在一个已知体系上,依次增加或去掉 二元体,不影响原体系的几何组成性 质。(分析复杂体系很有用)
学习情境二 结构的几何组成分析
学习单元 二 平面几何不变体系的组成规律
学习情境二 结构的几何组成分析
2.2.1 两刚片规则
本
2.2.2 三刚片规则
单 元
2.2.3 二元体规则
内
容
2.2.4 瞬变体系
2.2.5 常变体系
一、两刚片规则
1. 两个刚片相连
两个刚片用一个铰和一个不通过铰的链杆相连。 (或不全交于一点也不全平行的三链杆)
1. 三铰共线
三、 瞬变体系
(约束数量够,但位置不对。)
本来是几何可变体系,经微小位移后又成为几何不变的体系。
P α
N=P/2sinα α→0 N→∞
虽然经过微小位移以后变成几何不变体系,但体系会产生很大的内 力,不能作为实用的结构。
2. 三杆平行
三、 瞬变体系
(约束数量够,但位置不对。)
2. 三杆平行且不等长
Δ Δ Δ
3. 三杆共点
三、 瞬变体系
(约束数量够,但位置不对。)
三杆延长线交于一点
三、 常变体系
1. 三杆平行
如果一个几何可变体系,可以发生大位移,则这 样的体系,称为常变体系。
三链杆平行且等长
三、 常变体系
2. 三杆共点