OAM轨道角动量调制ppt课件
第六章 角动量PPT课件

i( y f z
z f ) y
Lˆy Lˆx f
2 (zy 2 f xz
z2
2 f xy
xy
2 z
f
2
x f y
xz 2 f ) zy
所以:
Lˆx Lˆy
f
Lˆy LˆxБайду номын сангаасf
2 ( y f x
x f ) y
[Lˆx , Lˆy ] iLˆz
其中用到了关系式:
2 f 2 f zx xz
0
因为x,y,z的循环置换使
L不ˆ2x改变,Lˆ2y上式进Lˆ行2z 两次循环置换,得:
[Lˆ2 , Lˆy ] 0, [Lˆ2 , Lˆz ] 0
第19页/共56页
L2, Lx, Ly, Lz中哪些可同时指定确定值?
➢因为 Lˆ2可与其它每个分量对易,所以可确定L2与任意一个分 量的确定值。但是,没有两个Lˆ 分量是可对易的,所以不能同
即两者可以同时确定。
例: [xˆ, pˆ x ] i
xpx
1 2
|
* id
|
1 2
|
i
||
*d
|
xpx
1 2
海森堡测不准原理的定量描述
第7页/共56页
回顾:三维箱中粒子的x和px平均值:
x a , 2
x2
a2(1 3
1
2
2
)
px 0,
p2 h2 / 4a2 x
根据:
(A)2 A2 A 2
2m x
[xˆ, Hˆ ]
2 m
x
i m
Pˆx
因为不对易,所以不能期望同时指定能量与x坐标的确定值。一
《动量和角动量》PPT课件

二. 质点系的动量定理
m1 , m2 系统 :
内力:
f1 ,
外力: F1 ,
分别运用牛顿第二定律:
m1:
F1 f1
m2:
F2 f2
dP1
dt dP2
dt
f
2
F2
F1 f1
F2
m1
m2
f2
二式相加,
由 于 f1 f2
F1
F2
d dt
P1 P2
对N个质点系统,外力用 F ,内力(即质点之间的相互作用)用 f , 则第 i 及第 j 质点的运动方程
1
mv2
mv1
mv1 F不
m不
变
变
t2
Fdt
t1
m
t2
v2
mv1
m不变
平 均 冲 力 :F
Fdt
t1
mv2 mv1
t2 t1
t2 t1
讨论
1)直角坐标系中的分量式( 二维 ):
I x
F t2
t1
x
dt
P2 x
P1 x
I y
F t 2
t1
y
dt
P2 y
P1 y
2) 动量定理在碰撞问题中具有特殊重要的意义。
例: 求均匀半圆铁环的质心(半径为R).
解:取长度为 dl 的一段铁丝,
以 l 表示线密度
dm =l dl .
l = m / (R)
y
dl
· C
R
d
o
x
由对称性可知, 质心C一定在 y 轴上, 即:xC=0 ,
yC
ydm m
yldl
m
第八章 角动量定理 PPT

人沿盘的边缘跑, 盘却反方向转动
当直升飞机机翼旋转 起来时,由角动量守 恒知机身将发生反向 的旋转,为了稳定机 身,常在直升飞机的 尾部加上一尾翼。还 可在直升飞机上加双 重反向旋转的机翼。 其目的之一都是为了 保持机身的稳定。
直升 飞机 的旋 转机
翼
在跳水运动员的跳水过程, 运动员从跳板向前跃起时, 绕一通过质心的水平轴有 一角速度,从而具有绕通 过质心的水平轴的角动量。
在空中时,他把手和腿都收
缩到靠近身体质心的位置, 使转动惯量迅速减小,由 于角动量守恒,使角速度 迅速增加,以便在空中多 翻几圈。快接近水面时, 他把身体伸直,以便加大 转动惯量,减小角速度, 从而平稳地入水。
1-支架,2-可转动的
1 外环,3-可相对外环
2
转动的内环,4 -装在 内环中的回转仪转子。
宇宙中天体运动遵守角动量守恒
在宇宙中天体间的作用是引力。 引力是有心力,其力矩等于零。 在宇宙中天体的运动都遵守角动量守恒。
开普勒第二定律
行星对太阳的矢径在相同的时间内扫过的 面积相等。
开普勒第二定律的实质是角动量守恒。
宇宙中角动量守恒的表现 ——涡旋的星系m74
§8-2 角动量守恒定律与空间 旋转对称性
3 转轴光滑,无外力矩。
4 由于角动量守恒,回 转仪的转轴方向将固 定不变。因此它被广 泛地安装在飞船、飞
机、轮船导弹上,起 导航的作用。
由于地球自转时,不受外力矩的作用, 满足角动量守恒,其转轴总是指向同一 方向——北极星。地球还绕太阳以一定 轨道公转,其自转轴和公转轴方向不一 致,自转轴与公转平面的垂线成23.50。 由于地球自转轴方向恒定不变,地球的 北极有时偏向太阳。六个月以后,它又 偏离太阳,故地球上出现明显的四季。 夏天,阳光几乎与北半球球面垂直,而 冬天的阳光倾斜厉害,故夏热冬冷。
第7章 角动量 ppt课件
ppt课件
15
一、多电子原子的量子数
1.总轨道角量子数L
单电子轨道角动量
M l(l 1)
原子的总轨道角动量 ML ML L(L 1)
总轨道角量子数
L l1 l2 lN , l1 l2 lN 1, l1 l2
总自旋角动量在外磁场方向的分量
M Sz mS
N
总自旋磁量子数 mS msi i 1
共有2S+1个取值:S、S-1、S-2、…、-S
ppt课件
19
3. 总角量子数J
原子中各电子的轨道角动量和自旋角动量相互作用,得到一个 总的角动量。两种耦合方式: j-j耦合。先将每个电子的轨道角动量和自旋角动量耦合得到 该电子的总角动量,然后将各电子的总角动量再耦合得到原子 总角动量。 L-S耦合。将各电子的轨道角动量和自旋角动量分别耦合得 到原子总的轨道角动量和总的自旋角动量,两者再耦合得到原 子总角动量。
???yzxllil????zxyllil?????????????????????????????????????2222xxyzx222xxyxzx22yxzxyyxyxyzzxzxzyzzyzyyzlllllllllllllllllllllllllllllllllllliiii0??????????????????????????????????????????????????????????????8同样我们还可以求得
N
最小值为0或 li 的最小正值 i
ppt课件
lN 2,
16
单电子轨道角动量在外磁场方向上的分量
Mz m 原子总轨道角动量在外磁场方向上的分量
第角动量角动量守恒定律PPT课件
(练习二,17)
解 设猴子、重物对地面的速度分别为
。
由猴、重物组成的系统角动量守恒,得
v1、v 2
v1 v2
R
∵ v1 v猴绳 v绳-地 v v绳-地
v1
v2
而 v绳地 v物地 v2 , 则 v1 v v2
∴
v2
v 2
第23页/共29页
机械能不守恒
力物的猴拉加,力由速于上和轻爬相绳过等各程m,处中1又g张,因力绳为相对猴等猴和,的物所拉相以力同在大质另于量一猴,端的绳重对重T1
[ C]
第9页/共29页
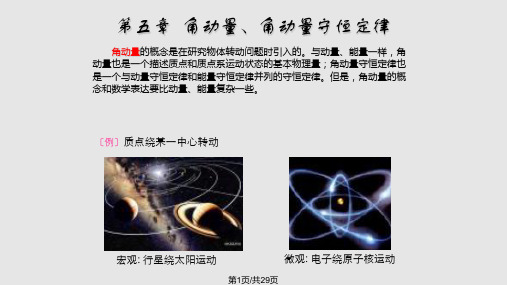
第五章 角动量、角动量守恒定律
本章主要阐述三个问题:
1)角动量。 2)角动量守恒定律。 3)有心力与角动量守恒定律。 3)有心力与角动量守恒定律。
第10页/共29页
5-3 有心力与角动量守恒定律
自然界中有些力具有这样的性质:力的方向始终通过某一固定点,力的 大小仅依赖于质点与这个点之间的距离。我们称这样的力为有心力,相应的 固定点称为力心。例如,万有引力是有心力;静电作用力也是有心力。
作半径为 的m圆轨道运动。取圆周上 点R为参考点,如图所示,试求:①质P点
在图中点1处所受的力矩 和质点的角动量
的力矩 和质点的角动量 。
;②质m点
在图中点2处所受
M1
L1
m
M2
L2
解 ① 力矩 M 1
2
在点1处, 所m受引力指向 点,故 P M 1 0
角动量 L1
由 m作圆周运动的动力学方程,可得速度
A 另离一端系向一右质,运量绳O动子,处到于达松位的弛置物状体态时。。物开O现体始A在速时使度,物的物体方m体以向位与与于0绳.位5d垂k置垂g直直0。处.的2试,5初求m速物度间体的在距 处
§3.6轨道角动量

方括号中微分算符与拉普拉斯算符在球坐标表示的角度部 分仅差一因子1/r2(即轨道角动量与转动部分的动能相联系)
二、球谐函数
p2 2 d 2 d 1 1 2 1 [ V (r )] { { (r ) 2 [ 2 (sin )]} V (r )} 2m 2m dr dr r sin 2 sin 2 d 2 d L2 [ (r ) V (r )] E 2 2m dr dr 2m r
类似地,
六、CG系数的递推关系
由
得
用<j1j2;m1m2|左乘上式,得CG系数的递推关系:
上式给出了不同CG系数间的关系。除符号约定外,递推关系和 归一化条件完全确定了CG系数
由递推关系联系的CG系数
作业
3.16、3.20
作用于|x’y’z’>,有
正是绕z轴无穷小转动的结果。即若p是平移的生成元,则 L是转动的生成元。
一、坐标空间中的轨道角动量
对无自旋粒子的任意态|α>,其波函数为<x’y’z’|α>。绕z轴 转无穷小角δΦ 后,其波函数为 用球坐标:
r , , 1 i
Lz r , ,
可知只有m=m1+m2的CG系数才可能不为零 2) 由矢量叠加模型可知,只有满足 j1 j2 j j1 j2 的CG 系数才可能不为零。
3) CG系数约定取实数(可能性见下面的递推关系),故 <j1j2;m1m2|j1j2;jm>= <j1j2;jm|j1j2;m1m2> 4) 由于CG系数为两基组的变换矩阵,组成(实)幺正矩阵,即 正交矩阵:
涡旋电磁波轨道角动量传输技术

涡旋电磁波轨道角动量传输技术一、什么是轨道角动量?目前,无线通信主要建立在平面电磁波上,已充分利用时域、频域、码域、空域和极化域这些复用维度来提高频谱效率。
为了获得更高的频谱效率,业界在不断尝试从电磁波的物理特性入手来实现信息传输方式的突破,比如轨道角动量(Orbital Angular Momentum, OAM)技术。
什么是OAM?根据经典电动力学理论,电磁波不仅具有线动量也具有角动量,其中,OAM描述的是电磁波绕传播轴旋转的特性,使电磁波的相位波前呈涡旋状,这种形式的电磁波被称为涡旋电磁波,如图1所示[1]。
OAM具有诸多OAM模态,其中OAM模态l=0为平面波,而对于l≠0的情况,不同模态值的涡旋电磁波彼此正交[2],通过模态的复用可以在不依赖于诸如时间和频率等传统资源的情况下发送多个同轴数据流,提供了无线传输的新复用维度,从而提升频谱效率。
图1 涡旋电磁波涡旋电磁波可分为电磁波涡旋量子和统计态涡旋波束。
其中,电磁波涡旋量子指的是利用相对论下的涡旋电子辐射出携带不同模态数的涡旋量子,由于单个量子携带OAM,利用OAM量子发射机和OAM量子传感器可分别产生和接收独立于电场强度的新维度,从而提升系统容量[3];统计态涡旋波束是指电磁波的宏观涡旋现象,其产生与接收方法类似于多天线系统中的波束赋形,目前业界就其能否提供无线传输新维度存在争议。
看到这里是不是一头雾水呢?没事,下面就跟小编一起掀起“OAM”的神秘盖头~~ (友情提示,文章有点长,一定要耐心读完哦)二、电磁波涡旋量子01技术原理电磁波涡旋量子是由磁场中回旋振荡电子辐射产生的[4]。
什么?量子?普朗克、爱因斯坦、玻尔、薛定谔?不不不,不要恐慌,往下看在发射端,首先利用高压电源对电子进行加速,然后高能电子进入均匀磁场。
将电子运动方向分解为平行磁场和垂直磁场两个方向,电子在平行磁场的方向做匀速直线运动,在垂直磁场方向受到洛伦兹力作用(洛伦兹力提供了向心力),在垂直于磁场和运动方向的平面内做回旋运动。
OAM轨道角动量调制

1.2 OAM的特性
a.正交性。不同模态的OAM光束相互正交,可将一组不同模态的OAM 光束作为信号调制的正交基。
例如:
' u (r, , z) u (r, , z) r drd { m n 0, nm |u m | rdrd , nm
2
OAM的正交性使得对于多模态的OAM复用系统,理论上在接收端可 以通过一组滤波器对不同模态的OAM光束进行完美分离和检测。 b.安全性。利用OAM承载信息具有很好的安全性。这种安全性归功于 OAM的拓扑荷和方位角之间的不确定关系。
OAM轨道角动量介绍
内容提要:
1 OAM轨道角动量研究背景
1.1 OAM的基本概念 1.2 OAM的特性
2 基于OAM的信息传输系统
2.1 OAM键控 2.2 OAM复用
2.3 产生方式
2.4 应用实例
3 OAM在无线通信中的应用
3.1 研究现状
3.2 基本原理 3.3 产生方式 3.4 电磁涡旋波的复用
f n Iei[ka sin cos( n ) n ]
n 1
N
当 N ,上式可写为:fn K1eiH J H (Ka sin ) 。其中 K1 N 和 H n n 分别是依赖于参考天线和天线电流关系的常数。若激励源 电流相位满足:n l n ln ,则 H ln l ,相位因子eiH n il il 转化为 e , 含有螺旋相位项 e 。这样通过控制阵元激励的相位, 可以有效地生成具有OAM的螺旋波束。
调制原理: 由单个高斯光束使用空间光调制器而产生不同拓扑荷涡旋光束叠加 而形成混合涡旋光束,其形式为: U al ul eil ,以此作为信息载体。 i 1 式中叠加的光束数M、拓扑荷 l 、幅值 u l 和权重系数 al 都编码为计 算机产生全息图的结构被发送到空间光调制器显示。 下图中数据被写入计算机产生全息图送到SLM,激光照射SLM,传 输场的空间谱出现在傅里叶透镜的后焦平面,经滤波后分离出+1衍射 级,则入射的高斯光束转化为携带被编码数据的混合涡旋光束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OAM复用的频谱利用率远远高于LTE、802.11n和DVB-T
通信类型 频谱利用率 传输速率
OAM
95.5bit· s-1·Hz-1
2.56 Tbit·s-1
LTE
16.32bit· s-1·Hz-1
326.4 Mbit·s-1
802.11n
2.4bit· s-1·Hz-1
144.4 Mbit·s-1
基于连续单激光器和动态全息图的OAM-SK
优点:
系统简单
光源数量少
可任意改变拓扑荷
缺点:
空间光调制器的刷新频率较低
2.2 OAM复用
这种方法通过调制光源阵列,然后再通过空间光调制器,将其转换 为携带轨道角动量的螺旋光束,这样就将信息加载到具有不同轨道角动 量的光束中。
基于时间变化的入射和静态全息图的OAM-DM
例如:
u m (r,,z )u 'n (r,,z )rd r d { 0 ,|u n m |m 2 r d r d ,n m
OAM的正交性使得对于多模态的OAM复用系统,理论上在接收端可 以通过一组滤波器对不同模态的OAM光束进行完美分离和检测。
b.安全性AM的拓扑荷和方位角之间的不确定关系。
调制原理:
由单个高斯光束使用空间光调制器而产生不同拓扑荷涡旋光束叠加
而形成混合涡旋光束,其形式为: U
M
aluleil
,以此作为信息载体。
传统的调制技术,使用频率、时间、码型和空间等资源作为自由度, 而OAM调制技术将载波携带的OAM模式作为调制参数。利用OAM模 式内在的正交性,将多路信号调制在不同的OAM模式上,根据模式 的不同区分不同的信道。由于具有OAM的螺旋波束可以构成无穷维 的希尔伯特空间,因此理论上同一载频利用OAM复用可获得无穷的 传输能力。
优点:
高比特率
高光谱效率
低误码率
缺点:
系统复杂
成本高
2.3 产生方式
激光谐振腔 螺旋位相片 全息图 柱面镜模式转换器
2.4 应用实例
接下来用两个实际系统模型:基于单光束动态全息图的OAM-SK和 基于多光束静态全息图的OAM-DM来讲解上面的两种原理。
基于OAM-SK的传输实例
l 1|12P()|
2
c.多维量子纠缠。2001年Mair等人在自发参数转换产生的光子对中, 观察到OAM纠缠态,揭示了OAM的量子本质。相对于传统的“0”、 “1”bit的二维纠缠,OAM的本征态的数目无限,可以实现任意维度 的纠缠。
2 基于OAM的传输系统
OAM作为一个新的自由度,已成为FSO系统中调制编码的新方法。 OAM编码即设计信息比特与OAM态之间的映射方式。目前OAM在 FSO系统中的应用机制主要有两种:OAM键控(OAM-SK)和OAM 复用(OAM-DM)。
TVB-T
0.55bit· s-1·Hz-1
31.668 Mbit·s-1
1.1 OAM的基本概念
近年来的研究表明,光束具有两种角动量,一种是由于光束的偏振特性产 生的角动量,另一种是由于光束具有螺旋相位结构而产生的轨道角动量。
1936年Beth使圆偏振光通过一个用石英光纤悬挂的半波带板,首先观察 到了由于光束圆偏振特性引起的角动量,并通过精确测量光纤的扭矩发现此 角动量与量子自旋有关。
OAM轨道角动量介绍
内容提要:
1 OAM轨道角动量研究背景
1.1 OAM的基本概念 1.2 OAM的特性
2 基于OAM的信息传输系统
2.1 OAM键控 2.2 OAM复用 2.3 产生方式 2.4 应用实例
3 OAM在无线通信中的应用
3.1 研究现状 3.2 基本原理 3.3 产生方式 3.4 电磁涡旋波的复用
本征态:其值为 l h ( l 为本征值)用以衡量和区分OAM的不同模态
。
2
拓扑荷:表示绕光束闭合回路一周线积分为 整数2 倍的个数,直观 l 上为光束沿轴向传播一个波长时其螺旋波前旋转 的次数。其值用
衡量。
1.2 OAM的特性
a.正交性。不同模态的OAM光束相互正交,可将一组不同模态的OAM 光束作为信号调制的正交基。
topological charge,简称TC)。
1.1 OAM的基本概念
当光束的场强函数含有与空间方位角有关的相位因子 e i l 时,每个光
子具有值为 l h 的轨道角动量。
轨道角动量:由于光束具有螺旋形相位结构而产生的角动量。
空间方位角: a rc ta n (y /x )= a rc ta n (z /r)
近年来发现,当光束含有角相关的相位分布(扭转相位或螺旋相位)时, 此类光束具有与角向相位分布有关的角动量,被称为轨道角动量,携带轨道 角动量的光束被称为“光学涡旋”(optical vortices), 它是一类具有螺旋
相位波前或相位奇点的特殊光场,其相位分布函数中常含有与旋转方位角 成正比的ex项p(il ) l , 通常是整数,又被称作光学涡旋的拓扑荷(
1.OAM轨道角动量研究背景
自1992年光的轨道角动量(OAM)由Allen等人提出以来,就受到 人们的广泛关注,尤其在发现可以通过对OAM进行调制来传递信息 之后,利用OAM进行FSO(自由空间光通信,free-space optical communication)通信掀起了世界性的研究热潮。
OAM键控: 保持光源不变,通过动态器件(如SLM)改变OAM的状态,信息被
编码加载到OV光束的OAM状态上,类似于数字通信中的键控调制。
OAM复用: OAM状态是固定的,OV光束用做信息的载体,全息图保持静止而
多个光源通过调制加载数据。
2.1 OAM键控
理论上OV光束有无限个本征态,对应无限个拓扑荷值,因此, OAM代表的比特数也没有上限。对于这种方法,保持光源不变,通 过动态器件(如SLM),信息被编码加载到OV光束的OAM状态。如 OAM的每个本征态可代表编码信号{000,001,010,011,100,101,110,111} 中的一个。进一步,当OAM的N个本征态用于通信时,每个态代表log2 N 个比特的信号。