一类含间隙系统的分岔与混沌的形成过程
一类含间隙系统的分岔与混沌的形成过程

附件1:一类含间隙系统的分岔与混沌的形成过程0 引言在机械生产中,有些装置由于考虑到保证润滑油膜、装配误差或热胀的需要,实际机构往往需要有意预留微量的间隙;有些装置由于使用过程中产生的磨损以及加工、制造和安装时出现的误差,不可避免地导致了间隙的出现;另外,像齿轮、连杆、凸轮、轴承等系统的有关零部件中, 间隙也是不可避免的。
由于间隙的存在,接触状态会发生变化,导致构件之间出现接触、脱离、再接触、再脱离的重复冲击,对动载荷和系统的动态特性产生不良影响,有时后果还非常严重。
当然,有些冲击机械和装置是利用碰撞振动达到预期工作目的的, 如振动压路机、振动夯土机、冲击震动落砂机和浇灌混凝土时的振动捣实等。
因此,对于含间隙机械系统和冲击振动系统而言,如何趋利避害、进行动力学优化设计、提高可靠性以及降低噪声等问题的研究,既具有理论价值又有着重大的现实意义。
一些根本问题的解决,将不仅推动非线性学科的发展,同时为工程设计提供全新的准则。
因此,近年来含间隙系统的研究已引起国内外学者的普遍关注。
碰撞振动问题的研究在理论上提出了一系列新的课题, 形成了非线性动力学研究的一些新的分支。
目前, 国内外学者已开始研究碰撞振动系统的奇异性问题[1,2]和复杂分岔问题[3],含间隙、摩擦、迟滞等分段光滑力学因素的机械系统的动力学问题[4,5]与混沌控制问题[6]也受到普遍关注。
随着理论研究的日益深入, 含间隙机械系统及冲击振动系统的应用研究[7,8]也正在迅速开展。
Natsiavas用接缝分析证明,耗散连续分段线性振子的周期运动不会发生Hopf分岔[9]。
本文通过选用变步长四级四阶Runge-Kutta法进行数值仿真,研究了由一类直齿圆柱齿轮系统建模得到的单自由度含间隙弹性约束系统周期运动的局部分岔及混沌的形成过程,通过选择一个碰撞界面作为Poincaré映射截面,首次证明单自由度含间隙系统中不仅存在叉式分岔、倍周期分岔,而且还存在Hopf分岔(或称内衣马克-沙克分岔,概周期分岔),并且给出了发生Hopf分岔的具体系统参数。
单自由度含间隙和干摩擦碰撞振动系统的分岔与混沌
闯
707 ) 30 0
摘 要 :建立了单自由度含间隙和干摩擦的碰撞振动系统的动力学模型, 利用半解析、 数值摸拟方法求解系统的
响应并给出了判定 系统粘滑碰撞 准则 , 阐述TN定 系统周期运 动稳定性 的理论方法 , 对系统在不 同摩擦力影 响所呈现 出
的动力学行为进行 了非线性 动力 学分 析 , 并进一步分析 了由于摩擦 导致 的粘 一 滑振动行为 。
s( id Yd ,
关键 词 :干摩擦 ; 间隙 ; 一 粘 滑振动 ; 非线性振动 ; 定性 稳 中图分类号 :0 2 32 文献标识码 :A
含间 隙 的机 械 构 件 广 泛 存 在 于 机 械 、 空 、 天 、 航 航 交通 等系 统 中 J在 运 行 的过 程 中和 其 它 外 激 励 作 , 用下 , 零部 件 间将 出现 碰 撞 和 摩 擦 , 引起 噪 音 、 动 并 振
( 70 JA 5 0 1 R Z 02)
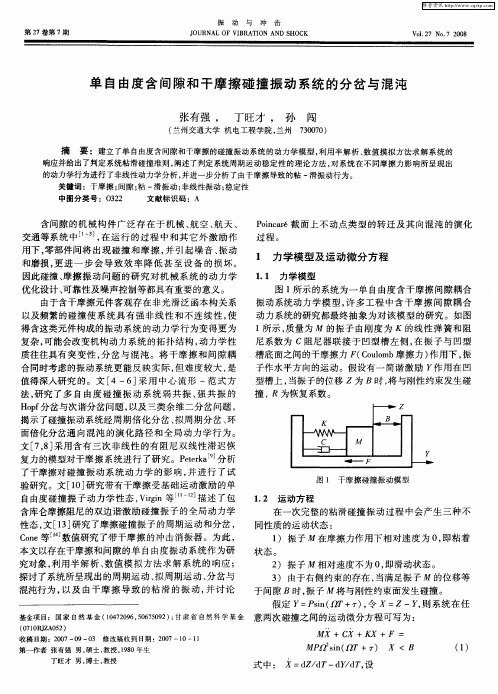
1 力 学模 型及 运 动微 分 方 程
收稿 日期 :20 0 7一o 9一o 修改稿收到 日期 :2 0 3 0 7—1 0—1 1
第 一 作 者 张 有 强 男 , 士 , 授 ,9 0年生 硕 教 18
M x + Cx + KX + F =
维普资讯
振
动
与
冲
击
第2 7卷第 7期
J OURN B AL OF VI RATI ON AND S H0CK
单 自由度 含 间隙和 干摩 擦 碰撞 振 动 系统 的分 岔 与 混沌
张有强 , 丁旺才 , 孙
( 兰州交通大学 机电工 程学院 , 兰州
Picr 面 上 不 动点 类 型 的 转迁 及 其 向 混沌 的演 化 ona  ̄截
一类双自由度含间隙振动系统的混沌碰撞运动及控制
—
一 —1 — 一 P1 - z P + Pz l — — ’ q P
, 一 —
L) ( J 3
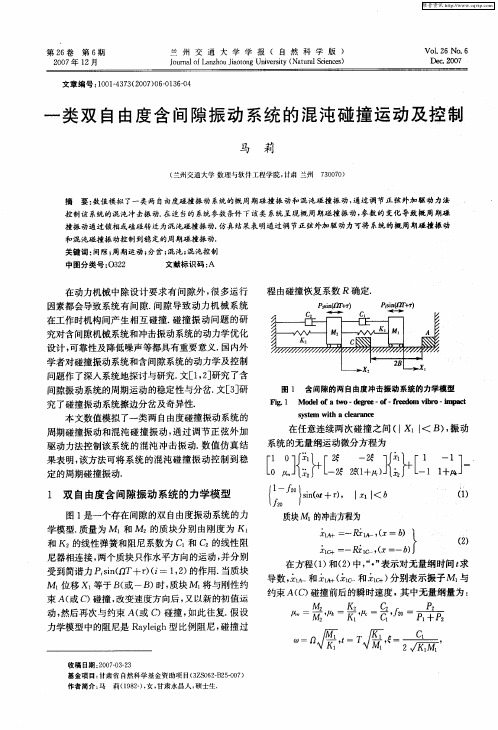
用 — q表示 图 1 p— 系统 的周期 运动 , 示力 表 周期 数 , q分别 表 示质块 M p和 与左右 约束 C和 A 的碰撞 次数 . 0 o , 取 一 a 选择 P icr截 面 一 { , t ona6 (l 5 , ,2 )∈ ×S, - 主 , z 一 , 3+ , 造含 问 2 一 - }构 - l 隙振 动系统 的 P icr 映射 ona6
驱动力法控制该系统的混沌冲击振动. 数值仿真结
果表明, 该方法可将系统的混沌碰撞振动控制到稳
定 的周期碰撞 振动.
[ 卜 [
f 。 +,II r < l , 2 ) ,b
质块Ml 的冲击方程为
斛 = 一
1-_ 段 + 1 ]
i )
() 2
1 双 自由度含间隙振动系统 的力学模型
摘
要: 数值模拟 了一类两 自由度碰撞 振动 系统 的概周期碰 撞振 动和混沌碰撞 振动 , 过调 节正 弦外加 驱动 力法 通
控制该 系统的混沌冲击振动. 在适 当的 系统参数 条件 下该类 系统呈现概周期碰撞 振动 , 参数的 变化 导致概周期碰 撞振动通过锁相或磕碰转迁为混沌碰撞振动. 仿真结果表 明通过调节正弦外加 驱动力可将 系统的概周期碰撞振动
V0. 6No 6 12 . De. O 7 c2o
文 章 编 号 :0 14 7 (0 70 —160 10 —3 32 0 ) 60 3 —4
一
类双 自由度 含 间 隙振 动 系统 的 混沌碰 撞 运动 及控制
马 莉
( 兰州交通 大学 数理与软件工程学院 , 甘肃 兰州 707) 3 0 0
一类单自由度分段线性系统的分岔和混沌控制
中图 分 类 号 :0 2 32 文 献 标 识 码 :A
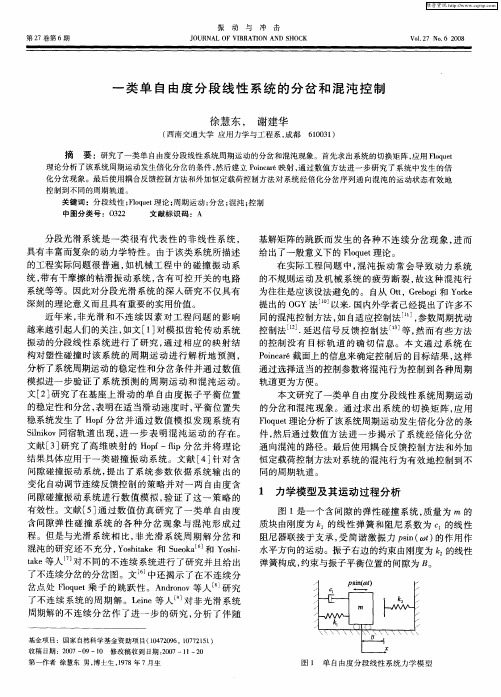
分段光滑系统是一类很有代 表性 的非线性系统 , 具有 丰富 而复杂 的动 力学 特 性 。 由于该 类 系统 所描 述 的工程实际问题很普遍 , 如机械工程 中的碰撞振动 系 统 , 有干 摩擦 的粘 滑振 动 系统 , 有 可控 开 关 的电路 带 含 系统等 等 。 因此对分 段光 滑 系统 的深 入研 究 不 仅具 有 深 刻 的理论 意 义而且 具有 重要 的实 用价值 。 近年来 , 光 滑 和 不 连 续 因素 对 工 程 问题 的影 响 非 越来越引起人们 的关注 , 如文[ ] 1 对模拟齿轮传动系统 振 动 的分段 线 性 系统 进 行 了研 究 , 过 相 应 的 映射 结 通 构对塑性碰撞 时该 系统 的周期运动进行解析地预测 , 分析了系统周期运动 的稳定性和分岔条件并通过数值 模拟进 一 步 验证 了 系统 预 测 的周 期 运 动 和 混 沌 运 动 。 文[ ] 2 研究 了在 基 座 上 滑动 的单 自由度 振 子 平 衡 位 置 的稳 定性 和 分岔 , 明在 适 当 滑 动速 度 时 , 衡位 置 失 表 平 稳 系统发 生 了 H p 分 岔 并 通 过 数 值 模 拟 发 现 系 统 有 of Slio i kv同宿轨 道 出现 , 一 步 表 明 混 沌 运 动 的存 在 。 n 进 文献[ ] 3 研究了高维 映射的 H p — l of fp分岔并将理论 i 结 果具体 应 用于 一 类 碰撞 振 动 系统 。文 献 [ ] 对 含 4针
同的周 期轨 道 。
变化 自动调节 连续 反馈 控制 的策 略并 对 一 两 自由度 含
一类三维动力系统的分岔及混沌分析

图1
初值分别为 (3, 1, 5) 和 (3.1, 1.1, 5.1) 时系统 (1) 的时间响应图 (a = 0.9, b = 0.2, c = 1.2)
从图1可以看出,若系统初始条件有微小差异,随着时间的延长,图中两条重合的曲线会逐 渐变成两条分开的曲线,这说明三维动力系统的混沌行为越来越突出.通过系统的相图(见图2) 也可以看出,随着时间延长,系统的混沌现象也越发明显.通过系统在 x - z 平面的投影相图及庞
求得原系统的平衡点为 P P2 ( , (1 ac) / c, / c ) 、 P3 ( , (1 ac) / c, / c) , 1 (0,1/ b, 0) 、 其中 (c b abc ) / c . 将系统进行线性化得其Jacobian矩阵如下:
x 1 -a J 2 x b 0 , 1 0 c
将所求系统的平衡点带入Jacobian矩阵,通过Maple符号计算软件可求得:当 c b abc 0 时, 系统有唯一平衡点 P 1 (0,1/ b, 0) ,且当 c b abc 0 , c a 1/ b 0 时,平衡点 P 1 是稳定的, 当 c b abc 0 , c a 1/ b 0 时,平衡点 P 1 是鞍点,当 c b abc 0 , 0 c 1 时,平 衡点 P 1 是非双曲的不稳定平衡点;当 c b abc 0 时,系统有三个平衡点:
( 1)
式中, x 表示利率, y 表示投资需求, z 表示价格指数, a 为储蓄量, b 为投资成本, c 为商品
张功宇等:一类三维动力系统的分岔及混沌分析 通过稳定性理论研究的方法,令系统(1)的左边微分项为零,可得:
33
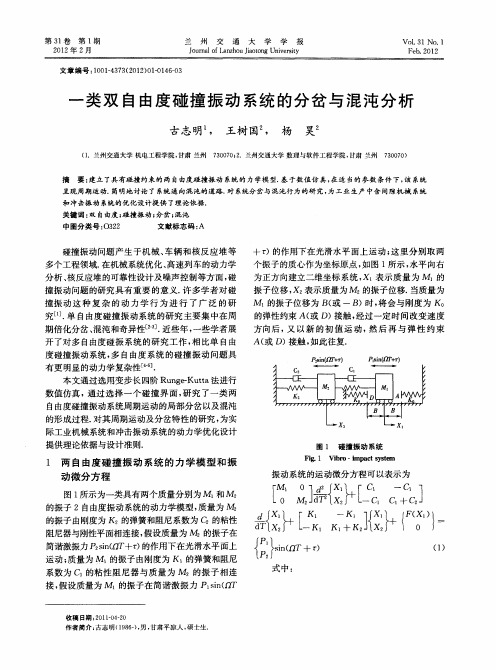
一类双自由度碰撞振动系统的分岔与混沌分析
GU h- n W ANG h — u 。 YANG o Z i mig , S ug o , Ha 3
-
kK 1 ’
为了更详尽地描述系统的倍化分岔行为以及通 向混沌的过程 , 在上述系统参数下对模型进行相图
响应分析 .
K
一
C,
_ l ’ ,— u c
L1 / f 』 2
’
图 3 为激振频率c一2 4 时质量为M1 a u .5 的振子
的相 图 , 中横坐标 表 示振子 在水平 方 向 的位 移 量 , 图 纵 坐标表 示 振子在 水平 方 向的速 度 , 时质量 为 M 这
究[. 自由度碰撞振动系统 的研究 主要集中在周 1单 ] 期 倍 化分岔 、 混沌 和奇 异性 [ ]近些 年 , 2. 。 一些 学者 展
开 了对多 自由度 碰 振 系统 的研 究 工作 , 比单 自由 相 度碰 撞振 动 系统 , 自由度 系统 的碰 撞 振 动 问题 具 多 有更 明显 的动力 学 复杂性 L6 4J .. 本文通 过选 用变 步长 四阶 Ru g- t 法 进行 n eKut a 数 值 仿真 , 过 选 择 一 个碰 撞 界 面 , 究 了一 类 两 通 研
= = =
丁
√ ,一 c 2 .
2 系统 的倍化分 贫 以及通 向混沌 的倍周 期
道 路
对 于碰撞 振动 系统 的周 期运 动 及 分 岔 的研 究 ,
一
岔, 质量为 M 的振子做周期为 4 的运动 , 相图如图
3 所示 . c 当 一 23 时 , . 5 系统 出现非 周 期 的稳 态 响
wt pc C- N nna nl i R a Wol A — i i at J. ol e A a s : el r p hm s ] i r ys d
一类三维混沌系统的分叉及稳定性分析

E + 处有一个 H opf分叉. 证明: 由方程 ( 4)得,
b=
-
3
2 + c + 2a( 2c- a ) 2 + 2( a+ b - c) + bc
因而有
b ( b0 ) =
-
3
2+
2 + c + 2a ( 2c- a ) 2 4ac- 2a2 + ( c2 + 3ac-
2a2 )
c
和
=
c2 + 3ac- 2a2 i
b0 ) ( c- a) -
KMa2 -M2a)Y+ 1 ( (c( c- a) -KMa2 -M2a) LM ac
(2a- 3c) - 2M (aMb0 - aM (c- a) )+ c(KMa2 -
Z
=
1 La2M
(2a2M2 +
b0 c(c-
a-
b0
) )X
+
LMba02c( aM 2
+
(L
+K
3c) c
-
2MR
+
P
)Z
+
(a(4c- 2a) Lc b0 c
+
Fb0 c a2M
)X
2
+
(a(4c- 2a) ( 2a- 3c) - 2FM )Z2 + ( 4c- 2a+
Lc2 b0 c
c
Lc
值, 相应的特征相量分别记为 v1, v2, v3, 则可计算向
量 = v2 + v3 = ( 1 1 2 a2
引言
随着非线性科学的广泛应用, 混沌控制已成为 一个热门的研 究领域. 1963 年, Lorenz[ 1 3 ] 在 一个
机械系统中的混沌现象及其控制和利用
Cha s i e h nia y t m s a d is Co t o d U l a i n o n M c a c lS s e n t n r la n i to z WEIZ iu hh a .XUE Yu j eu
( . hy a eeomet aet o p n h n eD sa t oh u g o g F s a u go g5 80 1 Z iun D vl p n rn m ayi S u d irc sa G a dn , oh G a d n 2 0 0, P C n t F n n n n
在不对称 分段线 性 机 械 系统 中也存 在 复 杂 的运动 形 式 ,并存 在分叉 和混沌运动形式 。在单 自由度含 间 隙系统中不仅存 在 叉 式分 岔 、倍周 期 分岔 、H p 分 of 岔 ,并且还存在概周期运动与混沌 。在两 自由度 含间隙振 动 系统 的对称 周 期碰 撞 运 动 中,经 叉式 分 岔 、倍 化 分 岔 、 “ 边 ” 奇异 性 ,最 终 会 形 成 混 擦 沌 。支座松动与局部碰摩耦合故 障会 导致 转子系统
动— — 混 沌 振 动 。
程 的非线 性特征 ,并对典型作业部件推土机铲刀所受 法向力的混沌特性进行 了量化分析 ,研究表 明地面机 械 系统中存在混沌现象 。粗轧机振动 系统在不 同边 J 界扰动频率和动摩擦系数影响下 ,形成一 系列 的非线
性 振动形 式 :周 期 振动 、概周 期 振动 和混沌 振动 。
0 前言
混沌是指发生在确定系统 中貌似随机的不规则运
动。按 传统观 念 ,当确定 性 系统 的参 数 不带 随机 性 时 ,对 确定的激励 的响应也 必须是确定的。但现 已证 实 ,由于系统 的非 线性 ,满足一 定条件 的振 动 系统 , 受规则 激 励 后 也 会 产 生 貌 似 无 规则 永 不 重 复 的 振
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件1:一类含间隙系统的分岔与混沌的形成过程0 引言在机械生产中,有些装置由于考虑到保证润滑油膜、装配误差或热胀的需要,实际机构往往需要有意预留微量的间隙;有些装置由于使用过程中产生的磨损以及加工、制造和安装时出现的误差,不可避免地导致了间隙的出现;另外,像齿轮、连杆、凸轮、轴承等系统的有关零部件中, 间隙也是不可避免的。
由于间隙的存在,接触状态会发生变化,导致构件之间出现接触、脱离、再接触、再脱离的重复冲击,对动载荷和系统的动态特性产生不良影响,有时后果还非常严重。
当然,有些冲击机械和装置是利用碰撞振动达到预期工作目的的, 如振动压路机、振动夯土机、冲击震动落砂机和浇灌混凝土时的振动捣实等。
因此,对于含间隙机械系统和冲击振动系统而言,如何趋利避害、进行动力学优化设计、提高可靠性以及降低噪声等问题的研究,既具有理论价值又有着重大的现实意义。
一些根本问题的解决,将不仅推动非线性学科的发展,同时为工程设计提供全新的准则。
因此,近年来含间隙系统的研究已引起国内外学者的普遍关注。
碰撞振动问题的研究在理论上提出了一系列新的课题, 形成了非线性动力学研究的一些新的分支。
目前, 国内外学者已开始研究碰撞振动系统的奇异性问题[1,2]和复杂分岔问题[3],含间隙、摩擦、迟滞等分段光滑力学因素的机械系统的动力学问题[4,5]与混沌控制问题[6]也受到普遍关注。
随着理论研究的日益深入, 含间隙机械系统及冲击振动系统的应用研究[7,8]也正在迅速开展。
Natsiavas用接缝分析证明,耗散连续分段线性振子的周期运动不会发生Hopf分岔[9]。
本文通过选用变步长四级四阶Runge-Kutta法进行数值仿真,研究了由一类直齿圆柱齿轮系统建模得到的单自由度含间隙弹性约束系统周期运动的局部分岔及混沌的形成过程,通过选择一个碰撞界面作为Poincaré映射截面,首次证明单自由度含间隙系统中不仅存在叉式分岔、倍周期分岔,而且还存在Hopf分岔(或称内衣马克-沙克分岔,概周期分岔),并且给出了发生Hopf分岔的具体系统参数。
对其周期运动及分岔特性的研究,为实际工业中含间隙机械系统和冲击振动系统的动力学优化设计提供理论依据。
1 力学模型及运动微分方程图1 单自由度含间隙弹性约束系统的力学模型图1所示的系统为一类单自由度含间隙弹性约束系统,它是一种比较典型的分段线性系统,许多含间隙系统动力学的研究都最终划归为对该模型的研究。
如图所示,质量为M的振子分别由刚度为1K 的线性弹簧和阻尼系数为C的线性阻尼器相联接,假设振子在简谐激振力)sin(τΩ+TP的作用下在光滑的水平上运动。
这里取间隙的中点作为坐标原点,水平向右为正方向建立一维坐标系统。
当振子位移为B(或B-)时,将会与刚度为2K的弹性约束A(或D)接触,经过一定时间改变速度方向后,又以新的初值运动,然后再与弹性约束A(或D)接触,如此往复。
系统的运动微分方程可以表示为)sin()(122τΩ+=+++TPXEXKdTdXCdTXdM(1)式中⎪⎩⎪⎨⎧-<+<<->-=BXBXKBXBBXBXKXE)()()(22(2)方程(1)和(2)的无量纲形式为()τωζ+=+++txexxx sin)(2(3)式中⎪⎩⎪⎨⎧-<+<<->-=bxbxbxbbxbxxekk)()()(μμ(4)在方程(3)和(4)中,“·”表示对无量纲时间t求导数,其中无量纲为12KKk=μ,MKC12=ζ,PXKx1=,1K MΩω=,M K T t 1=, PBK b 1= (5)2 系统的分岔和通向混沌的道路2.1 倍化分岔以及通向混沌的倍周期道路对应于系统的不同参数,图1所示的冲击副可能处在三种完全不同的冲击状态:无冲击状态、单边冲击状态和双边冲击状态。
无冲击状态对应(4)式中b x >或b x -<,这时不发生冲击;单边冲击状态对应(4)式中b x ->或b x <,这时振动位移仅在一端超过两极刚度的转折点;双边冲击状态时系统位移在两端均超过两极刚度转折点。
图2 分岔图当间隙较小、弹性约束刚度较大(这里取01.0=b ,30=k μ,2.0=ξ)时,对系统进行数值积分。
积分得到的局部分岔图如图2所示,图中横向坐标为激振频率,纵向坐标为振子运动到弹性约束A 点时的瞬时速度。
可以明显看出,随着激振频率的减小,系统出现逆倍化分岔序列,并产生了在人们所不希望看到的混沌行为。
为了更详尽地描述系统的倍化分岔行为以及通向混沌的过程,在上述系统参数下对模型进行相图响应分析。
(a)184.1=ω (b)17.1=ω(c)163.1=ω (d)184.1=ω(e)17.1=ω (f)163.1=ω(g) 15.1=ω (h)15.1=ω图3 相图和Poincaré图图3a 为激振频率184.1=ω时系统的相图,图中横向坐标表示振子在水平方向的位移量,纵向坐标表示振子在水平方向的速度,这时系统做稳定的单周期运动,冲击状态为双边冲击,系统位移在两端均超过两极刚度的转折点。
随着激振频率的减小,系统发生倍化分岔,这时系统做双周期运动,激振频率17.1=ω时的相图如图3b 所示。
当激振频率减小到163.1=ω时,系统再次发生倍化分岔,振子做周期4运动,相图如图3c 所示。
依此类推,从图3a 、3b 和3c 可以看出系统的逆倍化分岔序列。
相图3d 、3e 、3f 分别是与相图3a 、3b 、3c 相互对称的叉式形式,这时系统参数保持不变,激振频率也分别对应相等,只是初值不同。
当15.1=ω时,系统出现非周期的稳态响应,系统经倍周期道路而进入混沌响应状态,这时的相图见图3g 。
图3h 为15.1=ω时系统的Poincaré图,可以看出混沌吸引子的形状。
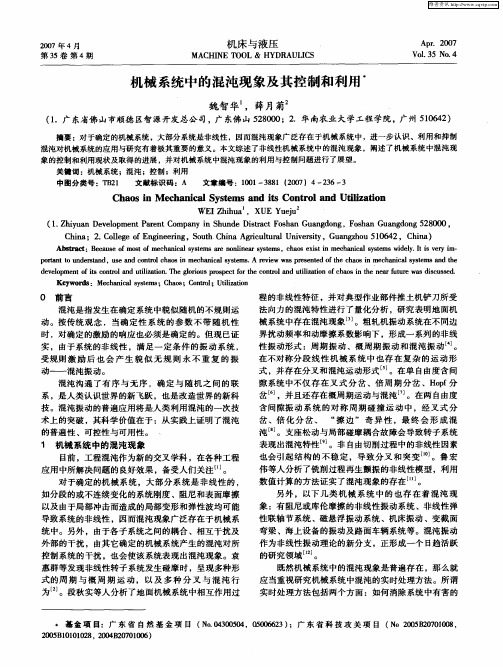
2.2 Hopf 分岔以及通向混沌的准周期道路选取图1的一组系统参数02.0=ζ,20=k μ,0.0=b ,取激振频率ω为分岔参数,数值计算系统在ω∈[2.6,4.5]内的动态响应。
对单自由度系统,通常选择σS R ⨯⊂2,令t ωθ=,{∈=),,(θσxx S R ⨯2, })π2m od(0=θ作为Poincaré截面,但是对振动冲击系统而言,存在由“擦边运动”所造成的奇异性,选择σ作为Poincaré截面不易观察冲击系统的“擦边运动”,见文献[1]。
故在本文中选择截面A :S R ⨯⊂2σ,{∈=),,(τσxx }0,,0.0,2>==⨯xb x S R τ作为Poincaré截面。
(a) (b)(c) (d)图4 投影映射图:(a)9.2=ω,光滑的吸引不变圈;(b)3.3=ω,变形的吸引不变圈;(c)35.3=ω,锁相;(d)9.3=ω,混沌数值结果表明,当75.2<ω时,系统具有稳定的1-1周期运动,这里用n-p表示碰撞振动系统的周期运动, n和p分别表示力周期数与碰撞次数。
当75.2>ω时,系统发生Hopf分岔,1-1周期运动失稳并分岔出概周期运动,在投影的Poincaré截面上形成一个吸引不变圈,见图4a,值得注意的是在分岔点附近的吸引不变圈具有光滑性, 但随着参数ω的逐渐增加, 吸引不变圈逐渐膨胀并且其光滑性也遭到破坏, 见图4b。
随着参数ω的进一步增加,系统的概周期运动锁相到如图4c所示周期运动。
参数ω继续增加, 系统进入混沌运动,见图4d。
3 结论(1)单自由度含间隙系统中不仅存在叉式分岔、倍周期分岔,而且还存在Hopf分岔。
(2) 全面分析单自由度含间隙弹性约束系统的分岔与混沌行为,选择适当的系统参数,可以避免机械系统工作在混沌状态,降低噪声,改善工作环境。
参考文献[1] Whiston G. S. Singularities in vibro-impactdynamics[J]. Journal of Sound and Vibration,1992, 152(3): 427~460[2] Hu H Y. Detection of grazing orbits and incidentbifurcations of a forced continuouspiecewise-linear oscillator[J]. Journal of Soundand Vibration, 1994, 187(3): 485~493[3] Mahfouz I A, Badrakhan F. Chaotic behaviour ofsome piece-linear systems, partⅠ:systems withset-up spring or with unsymmetric elasticity[J].Journal of Sound and Vibration, 1990, 143(2):255-288[4] 胡海岩. 分段光滑机械系统动力学的进展[J].振动工程学报. 1995,8(4):331~341[5] J. Knudsen, A. R. Massih. Dynamic stability ofweakly damped oscillators with elastic impactsand wear[J]. Journal of Sound and Vibration,2003, 263: 175~204[6] Hu Haiyan. Controlling chaos of a periodicallyforced nonsmooth mechanical system[J]. ActaMechanica Sinica, 1995,11(3): 251-258[7] 闻邦椿,刘树英,何勍. 振动机械的理论与动态设计方法[M].北京:机械工业出版社, 2002. (15~255)[8] 李润方,王建军. 齿轮系统动力学—振动、冲击、噪声[M]. 北京:科学出版社,1997. (259~351)[9] Natsiavas S. Journal of Sound and Vibration,1990, 141(1): 97~102附:图(b) 相位示意图对应于不同的参数系统,图1所示的系统可能处在三种完全不同的冲击状态:无冲击状态、单边冲击状态和双边冲击状态。
系统的相位示意图如图1b所示,图b中内部的点划线表示无冲击状态,对应(4)式中bx>或bx-<的情况;图b中的虚线表示单边冲击状态,对应(4)式中bx->或bx<的情况,此时振子位移仅在一端超过两极刚度的转折点;图b中最外边的实线表示双边冲击状态,振子位移在两端均超过两极刚度转折点。