加速度计校准数据处理系统设计
基于虚拟仪器的加速度计测试系统方案设计

关键 词 :虚拟仪器 ; 测试系统 ; 加速度 计
中 图分 类 号 :TP 1 +. 26 1 文献 标 识 码 :B
Te tng s s e o c e e o e e s d o it a n t u e t s i y t m f r a c l r m t r ba e n v r u li s r m n
的测试特别是对误差系数 的标定提出了很 高的要求。 目 前加速 度计测试 工 序多 , 作 复杂 , 容 易 引起 误 操 作 , 操 很 同
时测 试系统 不能满 足 自动化 、 快速 化 的测试 要 求 。随着 虚 拟仪 器技 术 的 飞 速 发 展 , 现 了 P I 出 X 总线 。P I 线 是 X 总 PI C 总线 的一种 扩展 总线 , 其模块 化 、 由于 通用 性 以及标 准 化及软 件兼容 性设计 等优 点 , 之 成 为 目前应 用 最 广 泛 的 使 测试 总线 。基 于 P I 线 的优 点 以及 为 了 有效 的 提高 测 X 总 试效 率和 自动化水 平 , 设计 了基 于 P I X 总线 的加速 度计 自 动化 测试系 统 。
Ke wm ̄s y l :PXI u o t s i g s s e ;a c l r m e e ;a t e t y tm n ceeo tr
O 引
言
度计 的简化模 型如式 ( ) 1:
U — k + ka + ka o lf z () 1
导 弹武器 系 统 的射 击 精 度 偏 差 主要 是 由惯 性 器 件 测 量误 差 引起 的 , 而加 速 度计 占其 大 部 分 , 因此 对 加 速度 计
式 中 :。 k 为加 速度 计 的零 偏 ; k 为加 速度计 的标 度 因数 ; 。 为加速 度计 的二 阶非 线性 系数 。 加 速度计 在各 个位 置的输 出可 以表示 为式 () 2:
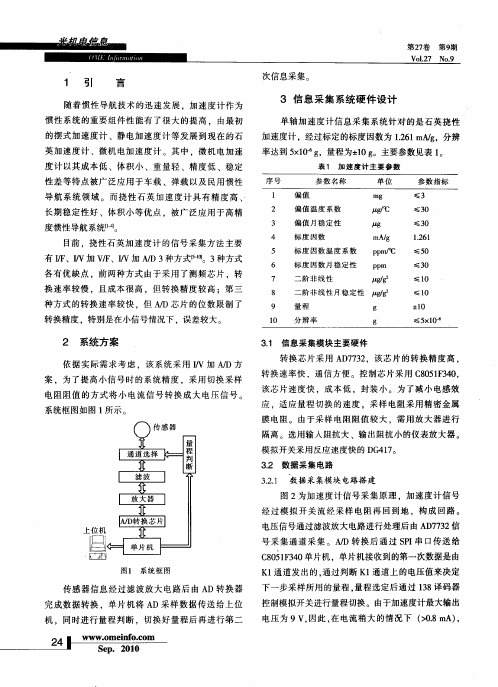
单轴加速度计信息采集系统设计
De in o n l— xsAc ee o sg f Sig e— i c l r me e g a q iio se a tr Sin l Ac ust n Sy t m i
YUE u — e g ,YU a d n 。 Ch n fn Hu — o g ,DUAN Fe g y n XU Jn k i。 I a — o g n -a g i — a L o ln Xi
Ab t c : hs p p rp e e t a n w sn l - x s a c l r mee in la q ii o rg a I h r g a we c n s r t T i a e r s ns e i ge a i c ee o tr s a c u s in p o r m n t e p 0 rm a a g t
,
i t ii lb h g r cso 4 b tA/ c i no dg t y t e hih p e iin 2 i a D hp AD7 3 I h a e o ma l u r n au , h v tm l as 7 2 n t e c s fs l c r tv 1 e t e s s e e wi lo J
摘
要 :为 了实现对惯 导 系统中加速度计信 号的采集 ,本文提 出了一种新的单轴加速度计信 息采集方案 该
方案是 将加速度计输 出的 电流信 号通过采样 电 阻转化 成电压信号 ,再 由高精度 MD芯片进行模/ 转换 .在 教 小电流情况下,运 用切换采样 电阻值 的方 式将 小电流信 号转换成 大电压信 号。从 而充分利 用 了 AD芯片的量 / 程 ,提 高了加速度计信 息采集精度 。实验证 明,该方法 可以提 高信号 的采 集精 度 ,使得在 小电流情 况下加 速
加速度监测数据校正(1)
加速度检测仪数据校正摘要本文针对声屏障检测仪内部加速度检测器的数据校正,利用题中所给的加速度数据,在校正的过程中,我们结合物理运动规律、离散型随机变量等知识,建立了加速度-速度、加速度-位移仿真模型,运用组合辛普森算法、卡尔曼滤波器、正负补偿法等方法消除了随机误差和系统误差的影响,使物体运动规律符合实际情况,并将模型推广运用到其他领域。
针对问题一中声屏障的速度、位移的仿真计算以及误差分析,我们基于s-,基a-av本物理公式建立计算声屏障运动速度和位移的仿真模型,采用高精度的组合辛普森积分公式,通过仿真计算分别绘制出三种情形下的速度、位移-时间关系图,将仿真图与理想情况相对比,我们发现存在系统误差和随机误差。
因此我们分别从系统误差和随机误差2个角度对数据进行定性和定量的误差分析。
问题二中,利用问题一中速度和位移的数值积分计算模型和误差分析结果,以尽量消除系统误差与随机误差,使得速度和位移的计算结果基本符合物体运动事实为目标,对加速度数据进行校正。
我们利用卡尔曼滤波对加速度数据进行降噪处理,然后利用正负补偿法消除系统误差,有效的校正了数据,将校正后的数据代入问题一所建模型中建议,发现物体运动规律符合实际情况,即最终速度为0,位移为一稳定值。
问题三中,改进后的加速度数据校正模型可以推广应用到生产生活中,如电梯的加速度测量、油井示功图位移测量技术、惯性导航系统、胎儿心率检测仪等等。
本文最大的特色在于利用精确度较高的组合辛普森算法,并且综合卡尔曼滤波法和正负补偿法分别减小了随机误差和系统误差的影响,具有一定的可靠性。
关键词:组合辛普森算法、卡尔曼滤波、正负补偿法、数据校正一、问题提出声屏障是一种控制铁路、公路、高速铁路等各种道路行车对周围环境的噪声污染有效措施之一,随着列车的大幅度加速,脉动风交替出现在列车两侧,从而引起对声屏障的拉压作用,声屏障发生摆动。
正常状态下,声屏障的摆动应当在一定的范围内,当超过正常范围则需要对其进行加固维修。
高精度电容式MEMS加速度计系统设计
高精度电容式MEMS加速度计系统设计李宗伟;杨燕;熊兴崟;丛宁;辛维;韩可都【摘要】A low precision,high speed analog digital converter(ADC) is embedded on the basis of traditional Σ-Δ architecture,to simplify analog interface circuit design of capacitive MEMS accelerometer system.ADC is used to convert analog voltage signal of analog front end amplifier output to digital signal.Based on capacitive MEMS accelerometer system embedded with an ADC,an over sampling average digital algorithm is used to evaluate the signal,which can effectively reduce the system requirement of the noise performance of front end amplifier.This method provides potential to achieve low power consumption and high precision design.Simulation results show that SNR of accelerometer presented is improved about 10 dB than that of system without using over sampling average technique.%在传统Σ-Δ架构基础上,引入了低精度高速模/数转换器(ADC),将前置放大器输出的模拟电压信号转换为数字信号,有利于简化电容式微电子机械系统(MEMS)加速度计系统模拟接口电路设计.在嵌入ADC的MEMS加速度系统中,采用过采样平均数字算法对信号进行估计,有效降低系统对前置放大器噪声性能的需求,利于实现低功耗和高精度的设计目标.仿真结果表明:与未采用过采样平均技术相比,当前置放大器输出等效噪声大于1μV/Hz时,系统的信噪比(SNR)提高了约10dB.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)006【总页数】5页(P98-101,104)【关键词】微电子机械系统;Σ-Δ;模/数转换器;数字环路滤波器;过采样平均【作者】李宗伟;杨燕;熊兴崟;丛宁;辛维;韩可都【作者单位】中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029;中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029;中国科学院大学,北京 100049;中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029;中国科学院大学,北京 100049;中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029;中国科学院大学,北京 100049;中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029;中国科学院地质与地球物理研究所,中国科学院油气资源研究重点实验室,北京 100029【正文语种】中文【中图分类】TP212;TN432微电子机械系统(micro-electro-mechanical system,MEMS)加速度计具有微小型化,低功耗,高精度等优势,在惯性导航,消费电子以及石油勘探等领域[1~4]得到了广泛的应用。
MEMS加速度计传感器专用ASIC简介及设计

MEMS加速度计传感器专用ASIC简介及设计王浩(无锡华润上华科技有限公司设计服务中心,上海,200072)摘要:MEMS做为本世纪前沿技术,有着非常广阔的前景,越来越受到业界专注。
本文介绍了华润上华设计中心研发的3轴加速度计的原理及ASIC电路设计,该电路由前置放大器、增益失调调节电路、模数转换器、温度感应器及数字信号处理电路等组成。
本电路结构简单,精度高,功耗低,能很好地满足系统中惯性及加速度的测量。
关键词:微电机系统;加速度计;模数转换器;前置放大器;温度传感器;增益失调校准MEMS Accelerometer ASIC Introduction and DesignWANG Hao(Design service center,CSMC technologies Corporation,Shanghai200072,China)Abstract:As advanced technology of this century,MEMS has a very broad prospect and is increasingly focused by the industry.This paper introduces the principle and ASIC circuit design of the3-axis accelerometer developed by CSMC Design Center.The circuit consists of preamplifier,gain offset adjustment circuit,analog-to-digital converter, temperature sensor and digital signal processing circuit.The circuit has the advantages of simple structure,high pre-cision and low power consumption,and can well satisfy the measurement of inertia and acceleration in the system. Key words:MEMS;Accelerometer;ADC;PA;TS;GOC1概述传感器是工业4.0时代的重要角色,随着物联网在工业领域的应用推广,越来越多的设备需要采用传感器采集数据,进一步去挖掘数据的价值,通过数据分析提升设备效率,预测一些可能发生的事情,减少停机损失,让工厂更贴近市场需求。
基于Microblaze的MEMS加速度计信号处理系统

基于Microblaze的MEMS加速度计信号处理系统孟桂芳;周文闻;王芃【摘要】针对目前MEMS加速度计信号处理系统在应用中满足小型化的需求,设计出了基于Microblaze的MEMS加速度计信号处理系统.采用FPGA作为硬件基础,嵌入软核CPU,扩展ADC、温度传感器、EEPROM、UART等外设接口.设计出了数字滤波器的原型,并通过递推算法在片内实现其功能.根据实测的加速度计温度曲线,通过多项式数据拟合的方法得出了零g下加速度计零偏关于温度的函数.实验结果表明,所设计的信号处理系统能准确采集加速度信息并传送给上位机,同时在启动温度补偿算法以后,加速度计的温漂得到了一定的改善,满足了加速度计系统实现高度集成化的需求.【期刊名称】《仪表技术与传感器》【年(卷),期】2013(000)012【总页数】4页(P84-86,89)【关键词】微机械;加速度计;软核处理器;可编程逻辑门阵列;温度补偿;数字滤波器【作者】孟桂芳;周文闻;王芃【作者单位】苏州工业职业技术学院电子与通信工程系,江苏苏州215104;北京博电新力电气股份有限公司,北京100083;清华大学精密仪器系,北京100084【正文语种】中文【中图分类】TP2730 引言加速度计是一种以牛顿惯性定律为基础的传感器,用于测量物体的加速度值。
以硅为材料的加速度计在最近20年得到了快速的发展,出现了硅电容、硅压阻、硅压电、厚膜应变、力平衡、电子隧道和热传导等多种加速度计,并广泛应用于航空、航天、机械、自动控制等诸多领域。
电容式微机械(MEMS)加速度计以其具有相对高的灵敏度,较好的温度特性,低的功耗以及能够工作在力平衡模式等优点而一直被作为加速度计研究的主要方向之一。
MEMS加速度计具有体积小、重量轻、成本低、功耗低等特点[1-2]。
提高MEMS加速度计性能指标的最大瓶颈是要解决加速度计的漂移问题,包括两类漂移:零g情况下,输出随温度变化而出现的温漂,以及输出随时间变化而出现的时漂。
测控技术及仪器类毕业论文——加速度计校正系统的研制
图⑴应变式加速度传感器
1惯性质量块2等强度梁3腔体图⑵电容式加速度传感器
4限位块5应变片6壳体
应变式加速度传感器中的电阻应变片具有金属的应变效应,即在外力作用下产生机械形变,从而使电阻值随之发生相应的变化。电阻应变片主要有金属和半导体两类,金属应变片有金属丝式、箔式、薄膜式之分。半导体应变片具有灵敏度高(通常是丝式、箔式的几十倍)、横向效应小等优点。应变式加速度传感器是利用电阻应变片受力变形而引起阻值变化的原理制成的,然而加速度是运动参数,所以首先要经过弹簧的惯性系统将加速度转换为力,再作用弹性元件上。如图⑵所示,在等强度梁2的一端固定惯性质量块1,梁的另一端用螺钉固定在壳体6上,在梁的上下两表面粘贴应变片5,梁和惯性块的周围充满阻尼液,用以产生必要的阻尼。测量加速度时,将传感器壳体和被测对象刚性连接。当有加速度作用在壳体上时,由于梁的刚度很大惯性质量也以同样的加速度运动,其产生的惯性力正比于加速度a的大小,惯性力作用在梁的端部使梁产生变形,限位块4是保护传感器在过载时不被破坏。这种传感器虽然制造工艺简单,但体积较大,广泛应用于低频振动的测量。电容式加速度传感器是以各种形式的电容作为变换器或传感元件,将被测的物理量的变化转化为电容变化的传感器。如图⑵所示,传感器有两个固定电极和一个可动电极。动电极作为振动质量由弹簧片支撑在两个固定电极之间,当g=0时,C1=C2,当g≠0时,质量块振动,从而改变动电极和固定电极的间隙,引起电容值的变化。这种传感器的优点是频率响应范围大,量程范围大,但是受弹性系统设计的限制。
在这样的背景下,制造一种体积相对较小,加工工艺比较简单,价格也适宜的加速度传感器已经是必然的趋势。一种新型的水银加速度传感器就满足了以上所有要求。众所周知,当物体静止在水平面上时,其所受的加速度为零。设物体逆时针方向旋转为正,当物体沿逆时针方向旋转θ(0<θ<90o)角,其所受的加速度为gsinθ。当θ=90时。物体所受加速度为g。同理,当物体沿顺时针方向旋转θ(0<θ<-90o)角时,其所受的加速度为-gsinθ。这种传感器就是利用此原理制造的。将水银液滴密封在一个立方体中,水银液滴与各面都有接触,当立方体旋转不同角度时对应不同的加速度,此时水银液滴与立方体的接触面积改变,从而引起电容的变化,这样就可以建立电容值变化与加速度的一一对应关系,达到测量加速度的目的。
基于PCI04总线的加速度计数据采集系统设计与实现
成了 温漂 、 零偏 等 自校 正 和 补 偿 功 能 , 时 内 部 同
集成 模拟 低通 和数 字滤 波器 , 高 的集 成 度带 来 更
对 采集 系统 要求 很 高 , 统 的设 计 方 案 和工 程实 传 践 都不 尽 如 人 意 。 P 1 4是 一 种 专 门为 嵌 入 式 C0 系统而 定义 的控 制 总线 , 有 体积 小 、 耗低 、 具 功 可 靠性 高 、 护方 便 、 P 机兼 容 等 c ust n s se ( aaaq iio y tms ADAS s c s IF c n e tra d A/ c ust n h v i tt n n t sig Th rfr .a i ) u h a / o v re n D aq iio a e 1 ai s i etn . i mi o eeo e
采 样 方 案 设 计 的 加 速 度计 数 据 采 集 系统 在 测 试 中 均 有 局 限性 , 此 基 于 P 0 因 C14总 线 提 出 IF 和 A/ 相结 合 / D 的 方 法 , 计 了高 精 度 加 速 度 计 数 据 采 集 系 统 , 系统 同 时具 有 IF和 A D 方 案 的优 点 。 从 参 数 标 定 中 可 以 设 该 / / 看 出 . 论 是 精 度 、 时 性 、 靠 性 , 是 动 态 测 试 范 围 都 得 到 了 极 大 的 改 善 , 中测 量精 度 远 高 于 1 一 g 无 实 可 还 其 0 。 关 键 词 :C14总线 ;/ ; / 数 据 采 集 ; 定 P 0 IF A D; 标
的优缺 点和使 用 范 围。 若 采用 A/ D方 案 , 面上有 大 量 的 ADC芯 市 片可供 选用 , 转换 速 率 能 达 到几 n , s 采样 频率 一
加速度监测数据校正(1)概要
加速度检测仪数据校正摘要本文针对声屏障检测仪内部加速度检测器的数据校正,利用题中所给的加速度数据,在校正的过程中,我们结合物理运动规律、离散型随机变量等知识,建立了加速度-速度、加速度-位移仿真模型,运用组合辛普森算法、卡尔曼滤波器、正负补偿法等方法消除了随机误差和系统误差的影响,使物体运动规律符合实际情况,并将模型推广运用到其他领域。
针对问题一中声屏障的速度、位移的仿真计算以及误差分析,我们基于s-,基a-av本物理公式建立计算声屏障运动速度和位移的仿真模型,采用高精度的组合辛普森积分公式,通过仿真计算分别绘制出三种情形下的速度、位移-时间关系图,将仿真图与理想情况相对比,我们发现存在系统误差和随机误差。
因此我们分别从系统误差和随机误差2个角度对数据进行定性和定量的误差分析。
问题二中,利用问题一中速度和位移的数值积分计算模型和误差分析结果,以尽量消除系统误差与随机误差,使得速度和位移的计算结果基本符合物体运动事实为目标,对加速度数据进行校正。
我们利用卡尔曼滤波对加速度数据进行降噪处理,然后利用正负补偿法消除系统误差,有效的校正了数据,将校正后的数据代入问题一所建模型中建议,发现物体运动规律符合实际情况,即最终速度为0,位移为一稳定值。
问题三中,改进后的加速度数据校正模型可以推广应用到生产生活中,如电梯的加速度测量、油井示功图位移测量技术、惯性导航系统、胎儿心率检测仪等等。
本文最大的特色在于利用精确度较高的组合辛普森算法,并且综合卡尔曼滤波法和正负补偿法分别减小了随机误差和系统误差的影响,具有一定的可靠性。
关键词:组合辛普森算法、卡尔曼滤波、正负补偿法、数据校正一、问题提出声屏障是一种控制铁路、公路、高速铁路等各种道路行车对周围环境的噪声污染有效措施之一,随着列车的大幅度加速,脉动风交替出现在列车两侧,从而引起对声屏障的拉压作用,声屏障发生摆动。
正常状态下,声屏障的摆动应当在一定的范围内,当超过正常范围则需要对其进行加固维修。
高精度电容式微机械加速度计系统的研究与设计的开题报告
高精度电容式微机械加速度计系统的研究与设计的开题报告一、选题背景及意义加速度计是一种广泛使用的传感器,被用于测量物体的加速度和振动。
在现代工业和科学研究中,加速度计被广泛使用于航空航天、机械工程、地震学、车辆运动控制和医学领域等。
电容式微机械加速度计作为一种新型的加速度计,在微型化、低功耗和高精度方面有着明显的优势。
因此,受到了工程研究和应用领域的广泛关注。
本文将研究和设计一种高精度的电容式微机械加速度计系统,旨在提高加速度计的测量精度和稳定性。
本研究将从加速度计传感器的设计和制造、信号放大和采集、数据处理和分析等方面入手,探索一种可行可靠的高精度电容式微机械加速度计系统。
二、研究内容1. 加速度计传感器的设计和制造:通过对常用纳米加工工艺的分析和比较,选择适合制造电容式微机械加速度计传感器的加工工艺;在此基础上,进行传感器结构设计和模拟,并利用微纳制造技术制造出加速度计传感器。
2. 信号放大和采集:设计电路实现对加速度计传感器输出信号的放大和滤波,并通过模数转换器把模拟信号转换成数字信号。
3. 数据处理和分析:使用MATLAB等工具对读取的数据进行初步处理和分析,提取加速度信号的主要特征,计算加速度的大小、方向和频率等参数。
三、研究方法与步骤1. 文献调研:对电容式微机械加速度计的发展历程、技术原理、常用加工工艺、信号处理与数据分析方法等方面进行文献调研和对比分析,明确研究方向和目标。
2. 传感器结构设计和模拟:基于MEMS技术,采用有限元仿真工具对加速度计传感器进行结构设计和模拟分析,确定传感器的尺寸、形状和材料等参数,得到传感器的静态和动态特性。
3. 加工技术选择和实验制造:根据仿真分析结果,选择适合制造加速度计传感器的纳米加工技术,并进行实验制造。
包括硅基材料的薄膜制备、图形转移、微加工、精密组装等步骤。
4. 信号放大和采集电路设计:根据加速度计传感器的特点,设计合适的信号放大和采集电路,包括前置放大、滤波和A/D转换器等部分,并进行电路仿真和实验验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
加速度计校准数据处理系统设计作者:刘莹解启瞻魏玫来源:《科技创新导报》2017年第33期摘要:为满足大批量加速度计校准数据处理的高可靠性、高准确度和高效率的需求,基于虚拟仪器技术和计算机技术,依据加速度计检定规程,设计了一种加速度计校准数据处理系统。
测试结果表明:系统人机交互界面友好,能够快速处理大批量加速度计校准数据,大大节省了加速度计校准数据处理、证书出具和原始记录出具的人力和时间资源,实用性强。
关键词:加速度计校准数据处理虚拟仪器中图分类号:TP2 文献标识码:A 文章编号:1674-098X(2017)11(c)-0007-03Abstract:To meet the high reliability, high accuracy and high efficiency need of calibration data processing for mass accelerometer, based on VI and computer technology, according to the V.R of accelerometer calibration, a kind of calibration data processing system for mass accelerometer has been developed. Testing results show that, the system has a friendly man-machine surface, and can quickly process large quantities of accelerometer calibration data. The system has very strong practicability.Key Words:Accelerometer; Calibration; Data processing; VI加速度计通常与适调仪配用,用于振动与冲击加速度的测量[1]。
在直升机领域内,加速度计常被用做监控发动机故障和结构损伤等的感知设备,在航空航天、汽车电子、地质勘探等领域内,加速度计的应用也越来越广泛。
通常,为保证加速度计能够获得准确的加速度测试数据,需周期性对其进行校准,维持加速度计的准确度,避免检测时误判[2]。
但随着加速度计的应用越来越广泛,加速度计的校准工作量也越来越大,对于计量工作者而言,经常一次就需要校准几十甚至是上百枚加速度计,校准完成后将会得到大量的校准数据,还需要进一步对这些校准数据进行数据处理和分析,根据数据分析结果判定所校加速度计是否合格,并出具原始记录和校准证书。
而如果用传统的数据处理方法对每一个加速度计的校准数据进行分析处理,并手动调整数据格式使其满足原始记录和校准证书的要求是非常困难的,且单个加速度计的数据处理时间长,数据处理效率低,无法满足大批量加速度计的校准需求。
为此,本文根据加速度计的校准数据处理原理,针对加速度计的多参数、大批量校准的特点,以及对高可靠、高性能、高效率提出的要求,基于虚拟仪器技术和计算机技术,依据加速度计检定规程,构建一种高自动化的加速度计校准数据处理系统。
1 加速度计校准数据处理基本原理依据压电加速度计检定规程JJG 233-2008,在首次和使用过程中,加速度计的检定项目均包括参考灵敏度、灵敏度频率幅值响应和灵敏度幅值线性度3个项目。
1.1 参考灵敏度参考灵敏度的检定是指在参考频率和参考加速度条件下确定被检加速度计的灵敏度。
被检加速度计的输出与所承受的加速度值之比即为参考灵敏度幅值。
需要时,测量两只加速度计的输出比。
使用中,加速度计参考点灵敏度数据处理时,需要根据规程要求,将各加速度计参考点的灵敏度数据提取出来,写入到保存文件中。
而在首次对加速度计进行校准时,还需要计算加速度计的灵敏度误差,灵敏度误差计算公式一般如式(1)所示[3]:(1)式中:为灵敏度出厂值;为加速度计实测参考灵敏度。
1.2 灵敏度幅频响应灵敏度幅频的检定一般采用振动连续扫描法、逐点法或随机激励法,在工作频率范围内,以1/3倍频程频率序列选取7~12个频率点,计算各频率下的灵敏度幅值。
灵敏度幅频响应以参考灵敏度幅值的相对偏差表示。
根据检定规程的计量性能要求,加速度计的灵敏度幅频响应应在±5或±10之间。
灵敏度幅频响应数据处理,即是提取各频率点下的灵敏度幅值和灵敏度幅频响应,分析各频率点频响绝对值最大值,判定其是否满足±5或±10的计量性能要求,给出判定结果。
1.3 灵敏度幅值线性度灵敏度幅值线性度检定是在实际使用的加速度幅值范围内选取5~10个点,包括最大和最小加速度,进行灵敏度幅值的检定。
对加速度幅值范围不大的情况,灵敏度的幅值线性度用检定点的灵敏度幅值相对于参考灵敏度幅值的相对偏差来表示。
根据检定规程的计量性能要求,加速度计的灵敏度幅值线性度应在±3之间。
加速度计校准数据灵敏度幅值线性度数据处理与灵敏度频响数据处理原理一致,即读取加速度计在各加速度值下的灵敏度幅值和灵敏度幅值线性度,分析灵敏度幅值线性度绝对值最大值,判定其是否满足±3之间,据此判定加速度计的灵敏度幅值线性度性能是否合格。
2 系统总体结构加速度计校准系统的原理如图1所示。
控制系统控制NI采集卡输出模拟信号,通过功放调理后加载至标准振动台。
标准振动台上背靠背贴合的标准加速度计和被测加速度计同步获取振动信号,利用压电效应将振动信号转换为微弱电信号[4]。
微弱电信号经过前置预处理模块放大等处理后,在控制系统控制下由NI数据采集卡采集。
在控制系统上对信号实时预处理,保存数据。
然后在校准数据处理平台上作进一步分析和处理,并按照校准证书格式要求保存数据。
加速度计校准数据预处理完成后,校准数据保存在Excel文件中。
该部分功能由PCB公司提供的标准振动台配套的计算机控制系统完成。
而校准数据处理系统是整个加速度校准系统的核心部分,主要完成两个功能:一是对预处理完成的数据作进一步处理,得到最终的加速度计校准结果;二是根据加速度计校准证书和原始记录要求,对处理完成的校准数据和校准结果格式进行调整,并保存数据。
总体流程如图2所示。
3 系统设计LabVIEW是由美国国家仪器公司NI推出的虚拟仪器(Virtual Instrument,VI)开发工具,它广泛地被工业界、学术界和研究实验室所接受,视为一个标准的数据采集和仪器控制软件[5]。
LabVIEW程序又称虚拟仪器,即VI,VI由两部分组成,前面板和程序框图。
校准数据处理系统基于LabVIEW软件平台设计,系统前面板设计见图3,整个操作界面控制按钮较少,用户操作起来十分方便。
利用加速度计校准数据处理系统分析加速度计校准数据时,选择文件路径,设置相关参数后,点击“开始分析”按钮,便可启动程序,进行校准数据处理。
数据处理完成后,点击“退出”按钮,即可退出VI程序。
灵敏度幅值响应数据处理及其程序设计是系统的重要组成部分。
该部分程序设计时,考虑到因加速度计的应用场合不同,送校时,客户要求的校准频率范围不一,导致预处理后得到的校准数据中的校准频率点存在差异,所以为了避免频率点混淆造成数据出错,程序中,须将各加速度计的校准频率点数据提取出来。
加速度计灵敏度幅值响应数据处理程序设计思想是,首先根据预处理的加速度计校准数据的保存特点,分别提取各个加速度计的编号、校准频率点、各频率点处的灵敏度幅值和灵敏度幅值响应。
再分析各加速度计灵敏度幅值响应的最大值,并判断其是否满足±5%的计量性能要求,给定频响测试结论。
加速度计幅值线性度数据处理程序,先是从预处理后的数据文件中提取加速度计的编号、各幅值测试点处的灵敏度值和幅值线性度,分析幅值线性度绝对值最大的点,判断其是否满足±3%的计量性能要求,根据判断结果给出线性度测量结论。
图4为本系统的程序框图。
4 软件测试与应用加速度计校准数据处理系统设计完成后,为了研究软件系统的性能,将系统用于某批次加速度计的校准数据的处理中,对校准数据处理系统进行测试。
该批次加速度计含两个型号,6个轴,一个轴对应一个Excel文件,分别为编号131525传感器的X、Y、Z轴和编号为CA3ZYD220V-100-00009的X、Y、Z轴的数据。
图5为软件运行之后得到的数据处理结果。
软件测试结果为得到一个excel文件,该文件内包含四部分内容,分别为参考灵敏度幅值数据、灵敏度频率响应数据、灵敏度幅值线性度数据和校准结论。
其中各加速度计的灵敏度频率响应数据第一行为测量频率点,第二行为各频率点处的灵敏度幅值以及最大灵敏度幅值频响。
灵敏度幅值线性读数据为各加速度值下的灵敏度值以及最大灵敏度幅值线性度。
校准结论部分显示了系统对所校准加速度计的频响和线性度的判定结果。
数据结构清晰,结论明了,能够满足加速度计校准和证书出具的要求。
5 结语为了提高大批量加速度计的校准效率和准确度,基于LabVIEW软件平台设计了一个加速度计校准数据处理系统。
系统具有友好的人机交互界面,操作简单,设置参数少,方便实用。
它能够依据加速度计的检定规程对加速度计校准数据进行处理,并通过分析判定给出校准结论,效率得到提高的同时避免了人为判定带来的错误。
另外,系统还能够根据校准证书和原始记录的格式和数据要求,将数据处理结果保存在excel文件中,节省了校准证书和原始记录的出具时间,大大提高了工作效率,极大地降低了加速度计的校准数据处理工作量。
参考文献[1] JJG 233-2008,压电加速度计检定规程[S].北京:中国计量出版社,2008.[2] 张艳.计量检定与仪器校准的区分[J].科技致富向导,2010(8X):219.[3] 朱蕾.压电加速度计规程修订后对振动量值溯源的影响分析[A].江苏省计量测试学术会议[C].2013.[4] 蓝伟威,符蓉,余璇,等.基于LabVIEW的荧光光纤氧传感器的信号处理系统[J].仪表技术与传感器,2014(5):1-3.[5] 何玉钧,高会生.LabVIEW虚拟仪器设计教程[M].北京:人民邮电出版社,2012.。