基于ADAMS的连续型机器人建模与运动仿真
adams运动仿真分析

基于Adams的机器人仿真xxxxxx.xx摘要:机器人是高级整合控制论、机械电子、计算机、材料和仿生学技术的产物,用来协助或代替人类工作。
机器人可用于生产制造业,可以替代人从事危险的工作。
它在制造业、医学、农业、建筑业甚至军事等领域中均有重要用途,研究和开发一套机器人仿真系统是非常必要的。
adams是虚拟样机领域非常优秀的软件,它能根据实际运动系统建造仿真虚拟样机,在物理样机建造之前分析出系统的工作性能,并能方便地改进和优化。
本文简要分析了虚拟样机技术和机器人国内外发展的现状和趋势并提出阐述了研究意义。
关键词:机器人,虚拟样机,仿真,adamsThe Robot Based On Adams SimulationWu XiaoyongWuhan Polytechnic University . WuhanAbstract: the robot is advanced integration of cybernetics, machinery and electronics, computer, material and the product of bionics technology, used to assist or replace human work. The robot can be used in the production of manufacturing industry, can replace people engaged in dangerous job. It in manufacturing, medicine, agriculture, construction and even military, etc all have important USES, research and develop a set of robot simulation system is very necessary. Adams virtual prototype field is very good software, it can according to the actual motion system building simulation in virtual prototype, physical prototype was built before the analysis of system performance, and can easily improvement and optimization. This paper briefly analyzes the virtual prototype technology and the present situation of the development of robots at home and abroad and the trend and puts forward the significance of the research paper.Keywords: robot, virtual prototype, simulation, Adams0.引言机器人技术是近几十年来迅速发展起来的一门高技术,它综合了机械与精密机械、微电子与计算机、自动控制与驱动、传感与信息处理以及人工智能等多种学科的最新研究成果,是典型的机电一体化技术,是目前科技发展最活跃的领域之一。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析机械四连杆机构是一种常用的机构形式,它广泛应用于各种机械设备中,如汽车发动机、机床、机器人和机械手等。
本文基于ADAMS软件,对机械四连杆机构进行运动仿真分析,并对仿真结果进行分析和讨论。
一、ADAMS软件介绍ADAMS是一款专门用于多体动力学仿真分析的商业软件,它可以用来仿真各种机械系统的动力学特性,包括车辆、飞机、机器人以及各种机械机构等,还可以分析机构的运动轨迹、速度、加速度、力矩等参数。
在本文中,我们将利用ADAMS软件对机械四连杆机构进行仿真分析,探究机构的运动规律和特性。
二、机械四连杆机构的结构和运动特性机械四连杆机构由四个连杆组成,其中两个连杆为机构的输入和输出轴,另外两个连杆则起到连接作用。
机构的结构如图1所示。
图1 机械四连杆机构结构示意图机械四连杆机构的运动特性与其连杆长度、角度以及连接方式等因素密切相关,下面我们将对机构的运动特性进行详细的分析。
1. 运动自由度机械四连杆机构的运动自由度为1,即只有一维平动或旋转方向。
2. 平衡性机械四连杆机构具有良好的平衡性,可以在很大程度上减小机构的惯性力,提高机构的稳定性。
3. 运动规律机械四连杆机构的运动规律比较复杂,难以用解析方法进行求解。
通常采用动力学仿真和实验方法,对机构的运动规律进行研究和分析。
为了探究机械四连杆机构的运动规律和特性,我们利用ADAMS软件对机构进行仿真分析。
仿真模型如图2所示。
在仿真过程中,我们可以通过改变机构的输入参数,如连杆长度、连杆角度等,来观察机构的运动规律和特性。
下面我们将举例说明。
1. 连杆长度变化时机构的运动规律改变机构的输入连杆长度,可以观察到机构的运动规律发生了显著的变化。
当输入连杆长度L1=100mm、L2=200mm时,机构的运动规律如图3所示。
图3 机构运动规律图(L1=100mm、L2=200mm)从图3中可以看出,当输入连杆开始旋转时,机构的输出连杆也随之旋转,但是旋转速度比输入连杆慢,这是由于机构的连杆长度不同,导致机构的角度运动不同所致。
基于ADAMS固定作业机器人运动仿真

要求 ,实 现抓 取 、搬 运工 件或操 纵工 具 ,是典 型 的机 电一体 化产 品 ,在实 现柔性 制 造 、提高产 品质 量 、代 替人 在恶 劣环境 下工 作等 方面 发挥 着重要 作用 。利用
虚拟 样机 技术 可 以在 设计 阶段 预测 产 品的性能 ,优 化 产 品的设计 ,进 行运 动学 以及 动力 学仿 真 。本 设计 就
的角度 , 。 示升 降缸活 塞上 升 的位移 , 。 d表 d 表示伸缩
缸 的伸 缩位移 , d 表示 o 到伸 缩缸 初始位 置 的距离 , 表示 手腕 转过 的角度 。
图 1 机 器 人 结 构 示 意 圈
机 器人 的运 动学分 析是运 动仿 真 的基础 ,通过 求 解运 动 学方程 的正 、逆解 ,得 到机 器人 手爪 位姿与关
维普资讯
・3 O・
机 械 工 程 与 自 动 化
20 0 6年 第 6 期
节 变量 的关 系 。正解 相对 简单 , 解 采用 P u 等 人提 逆 al 出的反 变换法 。
衰 1 固定作 业机器人 的连杆参数
a 1 i
1 2
更 直观 地 观察 运行 结果 。
2 机器 人实体 模 型的 构造 AD AMS软 件本 身 的三维 建模 功能 不强 ,只能 构
造 一些 简单 的和不 精 确 的模 型 。AD AMS软件有 很 多
专业 模块 , 中 ME HANIM/ r ( r / 其 C S P o P o E接 口) 模块
1 固定 作业 机器 人的 结构
固定 作业 机器 人 的结构示 意 图见 图 1 ,该机 器人
基于ADAMS平台的STANDFORD机器人三维建模和运动学仿真
杨孝杰·毕业设计
基于 ADAMS 为平台的 STANDFORD 机器人三维建模和运动学仿真
力的特种机器人和各种智能机器人。从某种意义上讲,一个国家机器人技术水平 的高低 反映了这个国家综合技术实力的高低。毋庸质疑,21 世纪机器人技术必 将得到更大的发展,成为各国必争之知识经济制高点。
1.2 工业机器人
机;国外已有模块化装配机器人产品问市。 3、工业机器人控制系统向基于 PC 机的开放型控制器方向发展,便于标准 化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高 了系统的可靠性、易操作性和可维修性。 4、机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等 传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采 用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制; 多传感器融合配置技术在产品化系统中已有成熟应用。 5、虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制, 如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。 6、 当代遥控机器人系统的发展特点不是追求全自治系统,而是致力于操作 者与机器人的人机交互控制, 即遥控加局部自主系统构成完整的监控遥控操作系 统,使智能机器人走出实验室进入实用化阶段。 此外,机器人家族中还有医用机器人、军用智能机器人、娱乐机器人等。
2
杨孝杰·毕业设计
基于 ADAMS 为平台的 STANDFORD 机器人三维建模和运动学仿真
1.3
STANDFORD 机器人
STANDFORD 机器人 (如图 1-1 所示) 是一种具有 6 个自由度的新型机器人,
该机器人不仅能够灵活的实现六个自由度的三维空间运动,而且具有结构稳定、 承载能力强、 误差小、 位置精度高、 响应快等一系列突出优点, 其应用日益广泛, 应用领域不断拓展,使得 STANDFORD 机器人成为国际上备受关注的研究领域之 一。目前,对 STANDFORD 机器人运动学和动力学的分析多采用的是解析法,为了 更有效的发展该类机器人的研究成果, 有必要建立适当的模型并进行仿真从仿真 分析的角度,对其进行建模、仿真、分析,为 STANDFORD 机器人的研究提供了一 种新的方法。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析1.引言机械四连杆机构是一种常见的机械结构,它由四个连杆组成,通过转动连接在一起,能够实现复杂的运动。
对于这种机构的运动行为进行仿真分析,可以帮助工程师们更好地理解其工作原理和性能特点,为设计优化和控制提供可靠的理论基础。
本文将介绍基于ADAMS的机械四连杆机构运动仿真分析的方法和结果,以期为相关领域的研究和应用提供参考。
2.问题描述机械四连杆机构的运动仿真分析主要涉及以下几个问题:首先是机构的运动学特性,包括连杆的运动轨迹、角度、速度和加速度等;其次是机构的力学特性,包括连杆的受力情况、驱动力和阻力等;最后是机构的动力学特性,包括连杆的动力学模型、运动过程中的能量转换和损耗等。
通过分析这些问题,可以全面了解机械四连杆机构的运动规律和工作性能,为相关工程设计和控制优化提供重要参考。
3.基于ADAMS的机械四连杆机构运动仿真分析方法ADAMS(Adams Dynamics)是一款专业的多体动力学仿真软件,可以对多体机械系统的运动行为进行模拟和分析。
基于ADAMS的机械四连杆机构运动仿真分析主要包括以下几个步骤:建立模型、设定运动和约束条件、进行仿真计算、分析结果并优化设计。
3.1 建立模型首先需要在ADAMS软件中建立机械四连杆机构的三维模型,包括连杆、连接点、驱动装置等。
通过软件提供的建模工具,可以简单快速地绘制出机构的几何结构,并添加材料、质量、惯性等物理属性,为后续的仿真计算做好准备。
3.2 设定运动和约束条件在建立好模型后,需要设定机械四连杆机构的运动和约束条件。
通过ADAMS软件提供的运动学分析工具,可以简单地定义连杆的转动角度、线速度和角速度等运动参数,同时添加约束条件,限制机构的运动范围和姿态,以保证仿真计算的准确性和可靠性。
3.3 进行仿真计算设定好运动和约束条件后,即可进行仿真计算。
ADAMS软件提供了理想化模拟和实验数据验证两种仿真方式,可以根据需求选择合适的方法进行计算。
基于ADAMS的并联机器人运动学和动力学仿真

第22卷 第8期计 算 机 仿 真2005年8月 文章编号:1006-9348(2005)08-0181-05基于ADA M S的并联机器人运动学和动力学仿真游世明,陈思忠,梁贺明(北京理工大学机械与车辆工程学院,北京100081)摘要:应用机械系统动力学仿真分析软件ADAM S,建立了Stewart型并联机构的虚拟样机模型,包括对并联机器人各部件的简化方法、在ADAM S中的模型描述及仿真过程控制,并利用该虚拟样机模型对并联机器人进行了运动学和动力学分析。
为并联机器人系统的设计、制造和模拟运动作业提供了理论依据和主要参数。
实现了在计算机上通过使用CAE仿真软件来对并联机器人的运动和动力性能进行分析,为并联机器人的设计提供了一套有效的分析方法。
关键词:并联机器人;运动学;动力学;虚拟样机中图分类号:TP391.9 文献标识码:AK i nema tics and D ynam ics S i m ula tion of P M T Ba sed O n ADAM SY OU Shi-m ing,CHEN Si-zhong,L I A N G He-m ing(School ofM echanical and Vehicle Engineering,Beijing Institute of Technology,Beijing100081,China)ABSTRACT:This paper uses mechanic dynam ic analysis soft ware ADAM S to build a virtual p rototype of theStewart Parallel KinematicsM achine Tool,gives the detail of si mp lified method of model,ADAM S descrip tion ofmodel,control of si m ulating p rocess.The virtual p rototyp ing model of the P M T p rovides the theoretic foundationand main parameters for the system design,p roduction and app lication in experi m ent.It show s the si mulation forthe kinematics and dynam ics of P M T,realizes an effective method for the engineering design w ith the CAEsoft ware on computer.KEYWO RD S:Parallel kinematics machine tool;Kinematics;Dynam ics;V irtual p rototype1 引言1965年,德国学者Stewart提出了一种新型的、6自由度并联机器人平台机构,称为Stewart平台。
基于ADAMS的巡线机器人运动学、动力学仿真

基于ADAMS的巡线机器人运动学、动力学仿真一、本文概述Overview of this article随着科技的不断发展,巡线机器人在电力、通信、物流等领域的应用越来越广泛。
巡线机器人的设计和控制涉及到复杂的运动学和动力学问题,因此,对其进行精确的仿真分析具有重要的理论和实践意义。
本文旨在利用ADAMS(Automated Dynamic Analysis of Mechanical Systems)这一先进的机械系统动力学仿真软件,对巡线机器人的运动学和动力学特性进行深入的研究。
With the continuous development of technology, the application of patrol robots in fields such as power, communication, and logistics is becoming increasingly widespread. The design and control of patrol robots involve complex kinematic and dynamic problems, therefore, accurate simulation analysis of them has important theoretical and practical significance. This article aims to use ADAMS (Automated Dynamic Analysis of Mechanical Systems), an advanced mechanical system dynamics simulation software, toconduct in-depth research on the kinematic and dynamic characteristics of line patrol robots.本文首先介绍了巡线机器人的基本结构和功能,阐述了其运动学和动力学仿真的必要性。
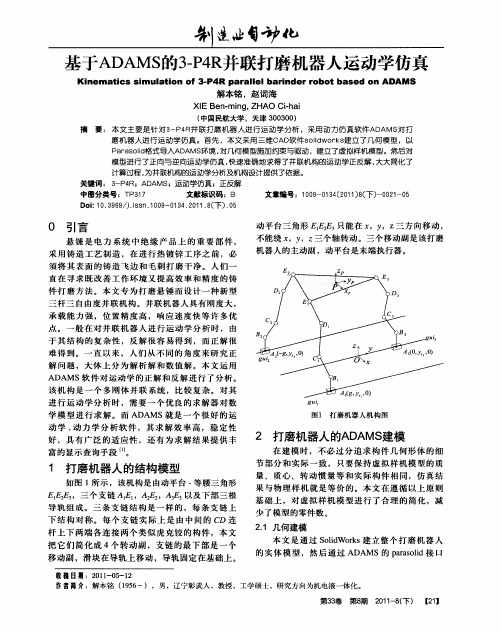
基于ADAMS的3-P4R并联打磨机器人运动学仿真
№ £ 2 § m . B s i t H
式 中矩阵 为雅 可 比矩 阵 ,如 果 的维 数为 1, T I q的 维 数 为 n ,那 么 维 数 为 mX,矩 阵其 定 义 为 z
t 刻 速 度 , 加 速 度 可 以 时
利 用 线 性 方 程 的数 值 方 法 求 解,
A DAMS采 用 C L A AHA 方 法 N
q=一 q O
q=一 q[ g +2 qq O, O )g 0 + ( ]
4 运动学分析
机 器人 的运 动 学分 析是 求解 机 器 人 的输 入 与 输 出构 件 之 间 的 位
反 解
命 名后保 存下 来 ,便于 后面 正反 解的 对 比分 析 。 42 位 置正 解分 析 . 在 打 磨 机 器 人 的 反 解 分 析 中 ,得 到 了 各 滑块
位 移 随 时 间 的 变化 曲 线 。已 知 打 磨 机 器 人 的 滑块 位 移 与 时 间 的变 化 关 系 ,便 可 求 出 打 磨机 器 人 动 平 台 的 运 动 情 况 。 在 P s rcso ot o esr中 , 将 3条 P
D i1 .9 9 Jis .0 9 1 4 2 1 .( ) 0 o : 3 6 / . n 10 -0 .0 1 8 下 . 5 0 s 3
0 引 言
悬 锤 是 电 力 系 统 中 绝 缘 产 品上 的 重 要 部 件 , 采 用 铸 造 工 艺 制 造 ,在 进 行 热 镀 锌 工 序 之 前 ,必 须将 其 表 面 的 铸 造 飞 边 和 毛 刺 打 磨 干 净 。人 们 一
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t h e p a r a me t e r i z e d mo d e l i n g nd a t h e k i n e ma t i c s s i mu l a t i o n f o r t h e r i g i d - l f e x i b l e c o u p l i n g s y s t e m o f c o n t i n u u m r o b o t w e r e d o n e b y he t h e l p o f t h e v i t r u a l p ot r o t y p e s o f t w a r e AD AMS .F i n a l l y t h e k i n e ma t i c s a n ly a s i s o f c o n t i n u u m r o b o t i s p ov r e d t o b e c o r r e c t ,a n d i t il w l b e
基于 A D A MS的连 续 型 机器 人 建模 与 运动 仿真
刘阳辉 ,张平
( 广 东工 业 大学机 电工程 学院 ,广 东广 州 5 1 0 0 0 6 )
摘 要 :针 对关 节型机器人运动空 间受 限的缺点 ,设 计一种无关节与连杆 的连续型机器人 ,能柔 顺而灵 活地改变 自身 的 形状 与角度。通过对连续型机器人运动变形 的几何 特性分析 ,研究 了其驱动 与机器人运动 变形 的关 系及 运动空 间 ,并通 过 A D A MS 虚拟样机 软件对连续型机器人进行 刚柔耦 合 系统 的参 数化建模 和运 动学仿 真 ,验证 了连续型机 器人 运动学分 析 的 正确 性 ,为连续型机器人 的设计 与研 制提供重要理论依据 。 关键词 :连续 型机 器人 ;运动学 ;A D A MS ;参数化建模 ;运动仿真
n a i mp o t r a n t t h e o r e t i c l a b a s i s f o r d e s i g n r e s e a r c h a n d ma n u f a c t u r i n g o f c o n t i n u u m r o b o t . Ke y wo r d s :C o n t i n u u m r o b o t ; Ki n e ma t i c s ; ADAMS ;P a r a me t ic r mo d e l i n g;Ki n e ma t i c s s i mu l a t i o n
L I u Ya n g hu i . ZHANG P i n g
Байду номын сангаас
( F a c u l t y o f E l e c t r o m e c h a n i c a l E n g i n e e r i n g ,G u a n g d o n g U n i v e r s i t y o f T e c h n o l o g y , G u a n g z h o u G u a n g d o n g 5 1 0 0 0 6 ,C h i n a )
A b s t r a c t :A i m e d a t t h e s h o r t a g e s o f j o i n t r o b o t i n l i mi t e d w o r k s p a c e ,a k i n d o f c o n t i n u u m r o b o t w i t h o u t j o i n t s a n d l i n k s w a s d e —
中图分类 号 :T P 3 9 1 . 9 文献标 识码 :A 文章编号 :1 0 0 1 — 3 8 8 1( 2 0 1 3 )1 1 —1 6 3— 4
Mo d e l i ng a n d Ki n e ma t i c s S i m ul a t i o n o f a Co n t i nu um Ro bo t Ba s e d o n ADAM S
f o r ma t i o n ,t h e mo v e me n t s p a c e a n d he t r e l a t i o n s h i p b e t w e e n he t a c t u a t i o n a n d t h e d e f o r ma t i o n o f c o n t i n u u m r o b o t we r e s t u d i e d .A l s o
2 0 1 3年 6月 第4 1 卷 第 1 1 期
机床与液压
MACHI NE TO0L & HYDRAULI CS
J u n e 2 0 1 3
Vo 1 . 4 1 No .1 1
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 1 1 . 0 4 6
s i g n e d ,w h i c h c o u l d c h a n g e i t s o w n s h a p e a n d a n g l e l f e x i b l y .T h r o u g h t h e g e o me t r y c h a r a c t e i r s t i c a n a l y s i s o f c o n t i n u u m r o b o t o n d e —