三自由度运动仿真平台设计及应用
基于ADAMS的三转动自由度并联机构仿真分析
基于ADAMS的三转动自由度并联机构仿真分析摘要:本文对3-sps-s三转动自由度并联微调机构进行了分析,其由动平台、静平台、驱动链和从动链组成。
并通过adams软件对3-sps-s并联机构进行了运动学分析,结果表明该机构能够满足完成绕x轴、y轴、z轴转动运动要求,而且运动平稳,具有良好的运动学性能。
在机器人领域以及其他工业领域,都具有很大的应用价值。
关键词:三自由度;3-sps-s并联机构;adams;中图分类号:tp242 文献标识码:a 文章编号:前言:并联机构具有精度高、承载能力大等特点,在工业生产和其他领域具有广阔的应用潜力。
其中,3-sps-s三转动自由度并联机构作为一种少自由度并联机构,由于结构简单、灵活性较高并且设计制造方便,成为研究以及应用较多的一种机构。
3-sps-s三转动自由度并联机构可用作机器人的肩、腕、踝等关节,另外还可用于板材安装机器人机器手、盾构管片拼装机微调机构、卫星天线等工业生产领域。
本文对3-sps-s三转动自由度并联机构进行了分析,通过pro/e软件建模了三维实体模型,并用adams软件对3-sps-s并联机构进行了仿真分析,为该机构的应用推广提供了一定的理论基础。
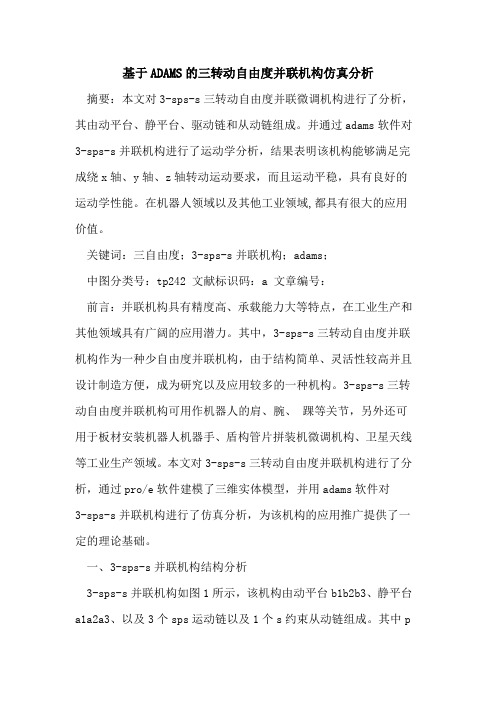
一、3-sps-s并联机构结构分析3-sps-s并联机构如图1所示,该机构由动平台b1b2b3、静平台a1a2a3、以及3个sps运动链以及1个s约束从动链组成。
其中p表示移动副,s表示球铰。
动平台b1b2b3和静平台a1a2a3是两个不同长度的等边三角形,其外接圆半径分别为r和r。
驱动油缸aibi(i=1,2,3)一端通过球铰ai连接在静平台的端点处,另一端通过球铰bi连接在动平台上,固定支撑杆杆一端o1与静平台固接,另一端o2与动平台铰接。
固定坐标系o1xyz置于静平台中央,原点位于o1点,z轴垂直向上,x轴通过通过a2点,y轴平行于a1a2。
动坐标系o2xyz的原点位于形心o2点,x轴沿着o2 b3方向,y轴平行于b1b2,z轴垂直于动平台。
一种可全方位移动的三轴转台结构设计

一种可全方位移动的三轴转台结构设计摘要:本文介绍了一种适用于一些小型飞行器模拟测试的实验平台,按要求对其结构进行了设计,并制作了实验的样机。
该实验平台实现可以三个旋转自由度和地面的全方位移动,并且该平台不需要驱动元件,结构简便实用。
关键词:三轴转台;全方位移动;结构设计引言三维转台作为航空、航天研究中的关键地面设备是导航制导设备的关键,所以转台的技术研究一直受到发达国家航空航天领域的高度重视。
三轴转台是用于飞机,导弹,飞船等其他飞行器及地面半实物仿真的关键设备,它可在实验室环境内实时地模拟复现飞行器在空中的动力学特性和飞行器在空间进行中滚转、俯仰、偏航等的运动姿态,转台技术广泛应用于航空、航海、国防建设领域中。
目前,各国研究制作的转台都是带有驱动机构的大型控制转台,这些测试转台无论是机械结构还是测量控制系统都极其复杂,转台的制作使用成本昂贵,操作复杂;而且,这些平台大多是不可自由移动的。
这对于一些需要在地面自由移动的小型简易的实验飞行器和其他一些需要低成本半实物仿真的设备,显然是不适合。
而针对这种在地面自由移动,低成本,使用、操作方便的飞行器设备实验仿真测试平台。
本文提出一种新的可全方位移动的三轴转台设计。
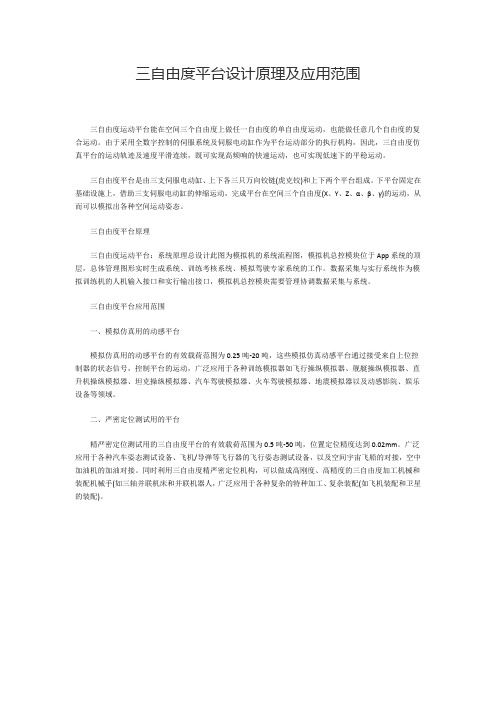
1.结构设计1.1整体结构方案设计按照设计要求,本设计具体地说是一种可全方位移动的三轴转台,包括彼此转动连接的转动部分及移动平台,转动部分包括转杆、中环及外环,移动平台包括底座、支杆及万向轮,外环转动安装在底座上,底座上沿周向均布有多个支杆,每个支杆均连接有万向轮,通过万向轮实现水平方向前后、左右两个平移自由度;中环转动安装在外环内,转杆作为被测对象的载体转动安装在中环内,通过转杆相对于中环转动、中环相对于外环转动及外环相对底座转动实现三个旋转自由度,如图1所示。
图1 转台三维模型1.2转动部分结构设计转台的转动部分包括中间转杆、中环及外环,具体情况可以参照图1。
中环和外环采用的正八边形的形状。
三自由度机械臂毕业设计

三自由度机械臂毕业设计摘要三自由度机械臂是一种常见的机器人结构,具有广泛的应用领域。
本文基于毕业设计的要求,对三自由度机械臂的设计与实现进行了探讨,包括机械结构设计、电控系统设计以及仿真测试等内容。
通过本文的研究,可以为相关领域的机械臂设计提供一定的参考和借鉴。
关键词:三自由度机械臂;机械结构设计;电控系统设计;仿真测试一、引言随着现代工业的发展,机械臂作为一种重要的智能装备,已经得到了广泛的应用。
特别是在自动化生产线、物流仓储系统、医疗和服务机器人等领域,机械臂可以实现高效的操作和灵活的生产。
对机械臂的设计与实现具有重要的理论和实际意义。
三自由度机械臂是一种典型的机械臂结构,在许多应用场合中都能够发挥重要作用。
本文将以三自由度机械臂为研究对象,通过对其机械结构设计、电控系统设计以及仿真测试的探讨,来完成一份关于三自由度机械臂的毕业设计。
二、机械结构设计1. 机械臂的型号确定需要确定三自由度机械臂的型号和结构设计。
在设计过程中,需考虑机械臂的负载能力、工作范围和精度等参数。
通过对市场上已有的机械臂产品进行调研和比较,选择一款适合要求的机械臂型号作为设计的基础。
2. 机械结构的参数设计在确定机械臂型号后,需要对机械结构的参数进行设计。
包括机械臂的长度、关节结构、材料选择等。
需要考虑机械臂的刚度和稳定性,以及对机械结构进行强度和刚度分析,保证机械臂能够满足设计要求。
三、电控系统设计1. 电机和传动系统的选型根据机械臂的参数设计,选择合适的电机和传动系统。
需要考虑电机的功率、转速和控制方式,以及传动系统的精度和可靠性。
2. 控制系统的设计设计机械臂的控制系统,包括控制算法、传感器选择和控制器设计等。
通过对电控系统的设计,实现机械臂的轨迹规划、位置控制和力控制等功能。
四、仿真测试通过建立机械臂的仿真模型,对机械结构设计和电控系统设计进行验证和测试。
利用仿真软件,模拟机械臂的运动和控制过程,评估机械臂的性能和稳定性。
三自由度平台设计原理及应用范围
三自由度平台设计原理及应用范围三自由度运动平台能在空间三个自由度上做任一自由度的单自由度运动,也能做任意几个自由度的复合运动。
由于采用全数字控制的伺服系统及伺服电动缸作为平台运动部分的执行机构,因此,三自由度仿真平台的运动轨迹及速度平滑连续,既可实现高频响的快速运动,也可实现低速下的平稳运动。
三自由度平台是由三支伺服电动缸、上下各三只万向铰链(虎克铰)和上下两个平台组成。
下平台固定在基础设施上,借助三支伺服电动缸的伸缩运动,完成平台在空间三个自由度(X、Y、Z、α、β、γ)的运动,从而可以模拟出各种空间运动姿态。
三自由度平台原理三自由度运动平台:系统原理总设计此图为模拟机的系统流程图,模拟机总控模块位于App系统的顶层,总体管理图形实时生成系统、训练考核系统、模拟驾驶专家系统的工作。
数据采集与实行系统作为模拟训练机的人机输入接口和实行输出接口,模拟机总控模块需要管理协调数据采集与系统。
三自由度平台应用范围一、模拟仿真用的动感平台模拟仿真用的动感平台的有效载荷范围为0.25吨-20吨,这些模拟仿真动感平台通过接受来自上位控制器的状态信号,控制平台的运动,广泛应用于各种训练模拟器如飞行操纵模拟器、舰艇操纵模拟器、直升机操纵模拟器、坦克操纵模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感影院、娱乐设备等领域。
二、严密定位测试用的平台精严密定位测试用的三自由度平台的有效载荷范围为0.5吨-50吨,位置定位精度达到0.02mm。
广泛应用于各种汽车姿态测试设备、飞机/导弹等飞行器的飞行姿态测试设备,以及空间宇宙飞船的对接,空中加油机的加油对接。
同时利用三自由度精严密定位机构,可以做成高刚度、高精度的三自由度加工机械和装配机械手(如三轴并联机床和并联机器人,广泛应用于各种复杂的特种加工、复杂装配(如飞机装配和卫星的装配)。
一种三自由度解耦并联平动机构

一种三自由度解耦并联平动机构近几年来,机器人领域的研究取得了长足的进步,各种新型机构的设计不断涌现。
其中,解耦并联平动机构因其在空间平动方面具有较好的性能,受到了广泛的关注。
本文将介绍一种三自由度解耦并联平动机构的设计原理、结构特点和应用前景。
一、设计原理该机构是一种平行四连杆机构,由上、下评台和四个连杆组成。
其中,上、下评台分别固定在机器人的移动评台和基座上,通过四个连杆将两个评台连接起来。
通过设计连杆的长度和角度,可以实现线性运动,并且可以将平移运动的方向和速度进行独立控制。
二、结构特点1.三自由度解耦:该机构通过精心设计连杆长度和角度,实现了三个自由度的解耦。
即可以分别控制X、Y和Z方向的平移运动,从而具有更灵活的运动方式。
2.稳定性高:由于平行四连杆机构的特点,该机构在运动过程中具有较好的稳定性,可以适用于复杂的工作环境。
3.结构简洁:由于该机构只由上、下评台和四个连杆组成,结构简洁,易于制造和维护。
三、应用前景1.工业制造:该机构可以用于工业制造中的自动化装配线上,实现对工件的精准定位和运动控制。
2.医疗器械:在医疗器械领域,该机构可以应用于手术机器人的运动部件,实现对手术工具的精确操控。
3.航空航天:在航空航天领域,该机构可以用于太空探测器的核心零部件,实现对探测器的平移运动和定位控制。
四、结语三自由度解耦并联平动机构作为一种新型的机械结构,在工业制造、医疗器械和航空航天等领域具有广阔的应用前景。
随着机器人技术的不断发展,相信这种机构将会在未来得到更广泛的应用和推广。
五、性能优势该三自由度解耦并联平动机构具有许多性能优势,使其在机器人领域备受青睐。
该机构具有较高的定位精度和重复定位精度。
由于机构设计合理,运动部件的相对位置和方位角度能够保持较好的稳定性,在进行运动控制时能够实现较高的精度要求。
该机构的运动轨迹平滑,并且具有较强的载荷承载能力。
这意味着机构在运动过程中产生的振动较小,能够较好地适应工作环境的变化,同时能够承载一定重量的工作载荷。
三自由度并联机器人的设计与研究
产业科技创新 Industrial Technology Innovation36Vol.1 No.14产业科技创新 2019,1(14):36~37Industrial Technology Innovation 三自由度并联机器人的设计与研究*宋 伟,张长军,张良贵,杜海彬,张华瑾(河北机电职业技术学院,河北 邢台 054000)摘要:把并联机器人与串联机器人进行比较,并联机器人的构成较为紧凑,刚度也较大,比串联机器人的负载能力更强。
而三自由度并联机器人在工业等诸多领域的作用越来越大,对它的研究和应用是未来科学技术发展的必然趋势。
文章通过对三自由度并联机器人的研究背景和分类发展进行探讨,分析了三自由度并联机器人的研究概况,研究了三自由度并联机器人设计的基本要求和步骤。
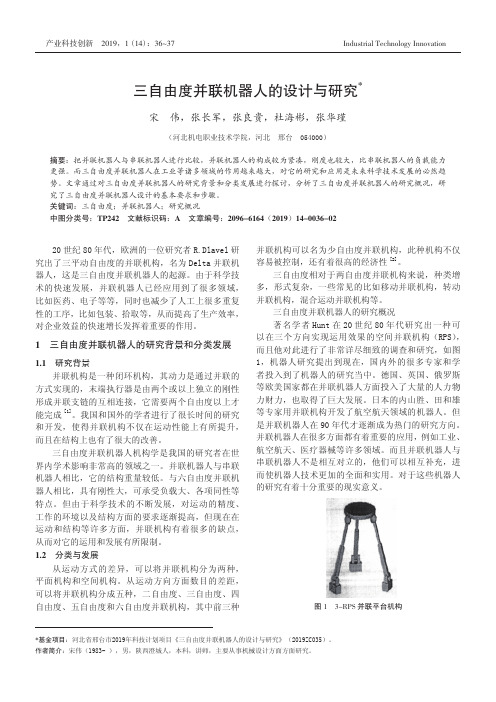
关键词:三自由度;并联机器人;研究概况中图分类号:TP242 文献标识码:A 文章编号:2096-6164(2019)14-0036-0220世纪80年代,欧洲的一位研究者R.Dlavel研究出了三平动自由度的并联机构,名为Delta并联机器人,这是三自由度并联机器人的起源。
由于科学技术的快速发展,并联机器人已经应用到了很多领域,比如医药、电子等等,同时也减少了人工上很多重复性的工序,比如包装、拾取等,从而提高了生产效率,对企业效益的快速增长发挥着重要的作用。
1 三自由度并联机器人的研究背景和分类发展1.1 研究背景并联机构是一种闭环机构,其动力是通过并联的方式实现的,末端执行器是由两个或以上独立的刚性形成并联支链的互相连接,它需要两个自由度以上才能完成[1]。
我国和国外的学者进行了很长时间的研究和开发,使得并联机构不仅在运动性能上有所提升,而且在结构上也有了很大的改善。
三自由度并联机器人机构学是我国的研究者在世界内学术影响非常高的领域之一。
并联机器人与串联机器人相比,它的结构重量较低。
与六自由度并联机器人相比,具有刚性大,可承受负载大、各项同性等特点。
毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://img.taocdn.com/s3/m/3ad4a49648d7c1c709a145a5.png)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
基于多自由度机器人仿真工作站的设计与实现

基于多自由度机器人仿真工作站的设计与实现随着科技的不断发展和应用需求的增加,机器人技术在各个领域得到广泛应用。
在机器人研究与开发过程中,仿真工作站作为一个重要的工具,扮演着模拟和验证机器人系统性能的关键角色。
本文将介绍基于多自由度机器人仿真工作站的设计与实现,具体包括系统框架设计、核心功能实现以及实验结果分析等内容。
一、系统框架设计在设计多自由度机器人仿真工作站的系统框架时,需要考虑到系统的稳定性和实时性。
根据这一目标,我们将系统分为仿真控制模块、动力学仿真模块和视觉模块三个子模块。
1. 仿真控制模块:该模块是整个仿真工作站的核心部分,负责机器人的运动控制。
它包括轨迹规划、运动控制和碰撞检测等功能。
通过该模块,用户可以灵活地设定机器人的运动轨迹,并且实时监控机器人的运动状态。
2. 动力学仿真模块:该模块模拟机器人系统的动力学特性,包括力学模型、关节传动特性等。
通过该模块,可以实现对机器人的动力学仿真,并且可以提供精确的运动学解算结果。
3. 视觉模块:该模块用于机器人环境的仿真显示和图像采集。
通过该模块,用户可以实时观察机器人在仿真环境中的运动轨迹和工作状态,并且可以采集机器人周围环境的图像信息。
二、核心功能实现在实现多自由度机器人仿真工作站的核心功能时,需要结合实际需求和技术条件,合理设计算法和程序。
以下是其中的几个核心功能的介绍。
1. 运动轨迹规划:通过该功能,用户可以设定机器人的运动轨迹,可以选择直线运动、圆弧运动等不同的轨迹类型,并通过插值算法实现平滑的运动轨迹生成。
2. 运动控制:该功能实现对机器人的实时运动控制,通过控制机器人关节的力矩输出,实现机器人的精确控制。
其中,PID控制算法和运动学解算算法是实现该功能的关键。
3. 碰撞检测:该功能用于在机器人运动过程中实时检测机器人与环境的碰撞情况,以避免机器人碰撞事故的发生。
该功能需要结合3D建模技术和碰撞检测算法进行实现。
三、实验结果分析在完成多自由度机器人仿真工作站的设计和实现后,我们进行了一系列的实验,并对实验结果进行了详细的数据分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由于采样周期足够短,以差分代替求导,从而得到叠 代公式: ϕ( k +1) n +1 = [ωx + tgθ( k +1) n (ω y sinϕ( k +1) n + ω z cosϕ( k +1) n )]∆T + ϕ k θ( k +1) n +1 = (ω y cosϕ ( k +1) n − ω z sinϕ( k +1) n )∆T + θk ψ ( k +1) n +1 = (ω y sinϕ( k +1) n + ω z cosϕ( k +1) n )∆T / cosθ( k +1 ) n + ψ k △T 表示采样间隔。 通过(2)即可根据每一采样时刻的各向角速度信号和 上一时刻的姿态角计算出当前时刻的姿态角。 平移坐标系和体坐标系之间有如下关系:
硬件部分由平台和电控系统构成。运动平台通过三套 独立的伺服电机驱动,如图 1 所示。伺服电机通过丝杆直接 驱动平台和导杆连接点作垂直方向的运动。平台的升沉、 纵摇、横摇运动分解成三个连接点的线位移。由于三套电机
收稿日期: 2002-03-12 修回日期: 2002-05-13 作 者 简 介 : 魏 纳 新 (1968-), 男, 江苏人 , 高工, 博士生, 研究方向为船舶运 动控制; 彭 秀 艳 (1962-), 女, 辽宁人 , 教授 , 博士生 , 研究方向为船舶运 动建模预报; 赵 希 人 (1940-), 男 , 辽宁人, 教授, 博导 , 研究方向为系统 建模预报; 施向宇 (1960-), 男, 江苏人, 工程师。
摘
要: 详细介绍了船舶三自由度运动仿真平台的控制原理及硬件和软件的工程实现。硬件由运
动平台和电控系统构成,电控系统是双闭环反馈控制系统,执行机构是伺服电机,输入信号由计 算机中控制软件给出。编制不同的控制软件,平台可以仿真实船不同的运动历程。最后介绍了平 台在船舶运动预报中的应用。 关键词: 三自由度;平台;仿真;预报 文章编号: 1004-731X (2003) 01-0063-03 中图分类号: TP391.9 文献标识码: A
DOI:10.16182/ki.joss.2003.01.017
Vol. 15 No. 1 Jan. 2003
系 统 仿 真 学 报 JOURNAL OF SYSTEM SIMULATION
• 63 •
三自由度运动仿真平台设计及应用
魏新 1 ,彭秀艳 2 ,赵希人 2 ,施向宇 3
2
(1 江苏省无锡市 116 信箱中国船舶科学研究中心流体室, 江苏 214082; 黑龙江哈尔滨市哈尔滨工程大学自动化学院, 哈尔滨 150001; 3 江苏省淮安市淮安机器制造厂, 江苏 223001)
图3
电机控制原理图
3
软件设计 [3]
图 4 为电控软件流程图,其中: 初始化模块完成平台归零动作,以及计数卡、控制卡
的初始化。 通讯模块完成计算机和其它设备的通讯,以便从外部 输入转台控制信号, 如通过手柄可直接操纵平台的运动或把
Vol. 15 No. 1 Jan. 2003
魏纳新, 等:三自由度运动仿真平台设计及应用 过二阶,以免产生较大的相移。
轴 A、 轴 B、 轴C 上、下限位 图2 三自由度运动仿真平台电控系统硬件图
逻辑 控制 电路
读取升沉、纵摇、横摇数据 调用通讯模块 调用数据处理模块
调用显示及运动记录模块 调用步进电机控制卡参 数设置模块 安全保护模块
频率脉冲,从而简化了软件设计。每轴具有独立的正、负限 位信号输入以实现硬件限位。 逻辑控制电路用以实现电控系统各部分执行顺序的控 制,并兼有报警功能。逻辑控制电路独立于计算机系统,便 于实现硬件保护。当系统中任一部分发出报警信号时,便发 出声光报警,当发生将造成机械损坏的致命性报警时,便立 即切断电机电源。 保护机构由非接触式接近开关组成。由于每个连接点 的安全行程有限(约 700mm),而最高线速度为 1m/s ,因此 在整个设计中对安全性作了重点考虑。通过试验测定,在设 计允许的最大线速度下(考虑安全系数) ,虽然有过冲,但 接近开关仍能迅速制动电机。
图1 三自由度运动仿真平台结构 电机 连接点
运动控制相互独立,因此可以模拟升沉、纵摇、横摇运动的 任意组合。 根据平台中各运动部分的重量及转动惯量和运动平台
1
硬件构成
[1] [2]
的设计承载量估算出轴扭矩, 进而选定了合适的电机和驱动 模块。本设计中选用了交流伺服电机。交流伺服电机自带光 电编码器,在整个转速范围内均可输出额定扭矩,控制方式 和步进电机控制相同,电机驱动系统的刚度可在线调整,使 电机具有最佳的响应特性。编码器、驱动器和交流伺服电机 三者构成了控制闭环,消除了步进电机中的“失步”现象。电
• 65 •
坐标系轴 o0x0 所转的角度称为横摇角 ö; 绕 o0y 0 轴所转动的 角度称为纵摇 è;绕 o0z 0 轴转动的角度称为艏摇角 ø。于是 可推导得如下关系
&= ω + tg θ(ω sin φ + ω cos φ) φ x y z &= ω cos φ − ω sin φ θ y z &= ψ
5
平台校验 [2]
为便于比较,平台校验时,我们采用了规则运动进行
(1)
检测。表 1 列出了主要频率下的测试结果。经过校验,平 台在纵摇小于 10°、横摇小于 15°、升沉峰-峰值小于 300mm 的情况下运动频率可达到 1.2Hz,且无明显相移。如不考虑 升沉,横摇和纵摇频率可达 2Hz 以上。
ωy sin φ + ωz cos φ cos θ
2
电控系统工作原理
仿真平台要求电机同时对速度和位移进行跟踪,理论
上只需准确地控制发往电机驱动器的步进脉冲的频率即可, 但在实际应用中由于存在计算上的累积误差、 执行机构的延 迟以及步进电机控制卡的限制,无法同时跟踪,因此,在本 系统中以位置跟踪为主。 电控系统由两个控制闭环构成,如图 3 所示。控制闭 环 1 由电机、编码器、驱动器构成,无须计算机干预。控制 闭环 2 由计算机及相关软硬件构成。 控制软件根据要求的平 台运动时间历程,把升沉、纵摇、横摇运动分解成平台三个 连接点的运动, 计算出从当前位置转移到下一时刻指定位置 所须的电机转角及转速,并对步进电机控制卡进行刷新。
Design and application of three freedoms motion simulation platform
2
( 116 box,China Ship Scientific Research Center; Wuxi City, Jiangsu Province, Code 214082, China Dept. Of Automatic Control, Harbin Engineering University; Harbi City, Heilongjiang Province, Code 150001, China 3 Huaian Machine Factory, Huaian City, Jiangsu Province, Code 223001, China)
控制闭环 2 电机位置 控制算法 步进电机 控制卡 频率受控的步进脉冲 步进方向 交流伺服电机驱动器 计数器 A相 B相 控制闭环 1 编码器 电机
4
运动测试系统 [4]
运动测试系统采用由三个角速度陀螺、三个加速度传
感器、 放大器、 采样及解算软件构成的捷联式运动测量系统。 通过该测量系统,可实时测量出运动物体的姿态(对于本平 台升沉、纵摇和横摇) 。 介绍运动解算前,先建立以下两个坐标系:平移坐标 系,或称为惯性坐标系 o0-x0y 0z 0,它以船的平均速度匀速直 线运动, o0x0 轴与船前进方向一致, o0z 0 铅直向下为正, o0y 0 轴指向右舷为正。船体坐标系 o-xyz,它是固定在船体上的 坐标系,并与船体一起平动和转动,ox 轴指向船艏为正, oz 轴向下为正,oy 轴指向右舷为正。在船体相对于平移坐 标系静止时,体坐标系与平移坐标系重合。体坐标系绕平移
引
言1
运动仿真平台有着广泛的应用。在实验室中利用仿真
导杆
平台可进行各种半物理仿真试验以确定最佳控制方案, 和船 模试验相比,成本低,周期短,适合作大量探索性试验。 本文是为配合舰船运动极短期预报而设计的。通过仿 真平台,再现实船或船模试验的运动历程,检验预报的准确 度。 本设计中考虑到对舰载机起降作业影响最大的主要是 升沉(垂向运动)、纵摇和横摇这三种运动,为此设计成这三 自由度运动仿真平台。 运动仿真平台由仿真平台硬件、控制软件和运动测试 三部分构成。
调用运动分解模块 读取当前位置
图4
电控软件流程图
仿真平台作为执行机构,纳入其它控制系统中。 数据处理模块主要为通讯模块服务。从通讯模块获得 的数据往往并不符合仿真平台的要求, 通过数据处理模块对 该数据进一步加工,使之转换成平台的升沉、纵摇和横摇数 据。如在本模块中加入鳍和横摇之间的传递函数,则可以从 通讯模块中读入鳍的动作,仿真鳍对横摇的影响。 运动分解模块把升沉、纵摇和横摇分解成三台电机的 运动。 安全保护模块对电机的期望转角进行软件限位,响应 “急停”输入。在该模块中实时判断各连接点的当前位置和速 度,在达到硬件限位之前,提前进行运动限幅,从而减少硬 件保护动作。对于有些较难实现的硬件保护,只能采用软件 保护,如三个连接点运动不协调时,可能造成横摇或纵摇超 出机械允许范围, 由于本系统目前尚未安装频率响应及几何 尺寸符合要求的倾角传感器, 只能依靠软件实时判断各连接 点的相对位置实现限位保护。另外,硬件保护发生时,往往 需要整个系统重新启动后才能工作,而软件保护,一旦模块 发现可能超出硬件允许范围(考虑一定的安全余量)时,软 件自动对数据进行修改,使之仍处于安全范围内,保证工作 的连续性。在测试过程中,由于软件保护的存在,未发生硬 件保护动作,而且整个运行过程平稳。 显示及运动记录模块负责显示平台运动的期望值和实 际输出值以及电机的工作状态,以便检查、比较。