基于单片机的汽车倒车防撞报警器开题报告
基于单片机的倒车防撞预警系统毕业设计

基于单片机的倒车防撞预警系统毕业设计倒车防撞预警系统是一种能够帮助驾驶员在倒车过程中避免碰撞的设备。
本文基于单片机设计了一种倒车防撞预警系统,并进行了详细的介绍。
该系统主要由倒车传感器、控制电路、显示屏和蜂鸣器组成。
其中,倒车传感器用于检测车辆周围的障碍物,通过将传感器输出的数据传给控制电路进行处理。
控制电路根据接收到的传感器数据,计算出障碍物与车辆的距离,并控制显示屏和蜂鸣器发出相应的警报。
在设计中,我们选择了超声波传感器作为倒车传感器,因为它能够准确地测量障碍物与车辆的距离。
我们将超声波传感器固定在车辆的后部,并将其与单片机相连。
当车辆开始倒车时,超声波传感器开始工作,并将检测到的障碍物距离传给单片机。
单片机接收到传感器数据后,根据一定的算法计算出车辆与障碍物的距离,并根据距离的大小决定是否发出警报。
为了方便驾驶员了解障碍物的距离,我们在车辆驾驶室内安装了一个显示屏,用于显示障碍物与车辆的距离。
当障碍物与车辆的距离小于一定值时,系统还会通过蜂鸣器发出警报,提醒驾驶员注意。
在系统的设计过程中,我们考虑到了多种因素。
首先,我们要确保传感器的数据准确性,要选择合适的传感器并进行校准。
其次,我们要考虑到驾驶员对系统的操作是否方便,要保证显示屏和蜂鸣器能够清晰地传达信息。
最后,我们还要考虑系统的可靠性和稳定性,要进行充分的测试和优化。
倒车防撞预警系统可以提高驾驶安全性,避免驾驶员在倒车过程中因为盲区而发生碰撞。
我们通过基于单片机的设计,实现了一个简单有效的倒车防撞预警系统。
通过这个设计,我们还深入了解了单片机的应用和原理。
希望这个设计能够对相关领域的研究和开发工作提供一些参考和启示。
基于单片机的汽车倒车防撞报警器开题报告

基于单片机的汽车倒车防撞报警器开题报告开题报告内容与要求一、毕业设计(论文)内容及研究意义(价值)设计的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
此设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
汽车防撞预警系统设计开题报告
开题报告1.文献综述1.1课题设计(或研究)的内容编程实现以单片机为核心的汽车智能防撞报警功能。
选择某一频率的超声波,通过测量其发送和接收的时间差,计算汽车与周围物体之间的距离,利用LED对距离进行显示,当距离小于安全距离时给出报警,到危险距离时输出信号对汽车制动,达到防撞的目的。
1.2设计(或研究)的依据与意义近年来,随着经济的快速发展和人民生活水平的提高。
到2010年,全球汽车保有量达到十亿辆,中国达到了七千万辆。
据中国工业协会统计,2009年我国累计生产汽车1379.10万辆,同比增长48.3%;销售汽车1364.48万辆,同比增长46.2%,这样的数据说明了中国是拥有一个勃勃生机的汽车市场和经济前景。
建设部近日提供的统计数据显示,我国私人汽车拥有量年均增速在20%左右,大大快于经济增速。
然而随着汽车拥有量的快速增加,交通安全等一系列问题也越发明显。
为应对这一问题,各种智能交通系统也应运而生。
智能交通系统ITS 是目前世界上交通运输科学技术的前沿技术,它在充分发挥现有基础设施的潜力,提高运输效率,保障交通安全,缓解交通赌塞,改善城市环境等方面的卓越效能,已得到各国政府的广泛关注。
中国政府也高度重视智能交通系统的研究开发与推广应用。
汽车防撞系统作为ITS 发展的一个基础,它的成功与否对整个系统有着很大的作用。
从传统上说,汽车的安全可以分为两个主要研究方向:一是主动式安全技术,即防止事故的发生,该种方式是目前汽车安全研究的最终目的;二是被动式安全技术,即事故发生后的乘员保护。
在过去20—30年中,人们主要把精力集中于汽车的被动安全性方面,例如,在汽车的前部或后部安装保险杠、在汽车外壳四周安装某种弹性材料、在车内相关部位安装各种形式的安全带及安全气囊等等,以减轻汽车碰撞带来的危害。
安装防撞保险杠固然能在某种程度上减轻碰撞给本车造成损坏,却无法消除对被撞物体的伤害;此外,车上安装的安全气囊系统,在发生车祸时不一定能有效地保护车内乘务员的安全。
单片机倒车防撞报警系统开题报告
课题名称 超声波倒车防撞系统课题来源 课题类型 指导教师 学生姓名学 号专 业开题报告内容:(调研资料的准备,设计的目的、要求、思路、预期成果、参考文献等。
) 一、调研资料的准备1. 查询资料,了解设计制作一款超声波倒车防撞系统的必要性及其应用前景。
2. 查询设计制作超声波倒车防撞系统的资料,了解所需元件及其功能。
3. 查询资料,明确设计方案及其可行性。
二、设计目的汽车在我们的生活中占据着非常重要的作用,安全是每个车主最关心的问题。
倒车时如果仅根据后视镜来判断后方物体的位置,将会带来很大的安全隐患,如果我们能在车上安装超声波防撞装置,就会给司机带来更多的判断依据,减少撞击事故的发生,本次的设计就是基于这个目的。
三、设计要求1. 设计实现单片机最小系统;2. 当倒车键按下时通过超声波模块测量到后方物体的距离;3.单片机主控模块实现超声波发射脉冲的发射和通过超声波接收模块接收到的信号计算出距离;4.使用液晶实时显示单片机计算出的距离;5.通过键盘设置报警距离,当距离达到设定值时声光提示。
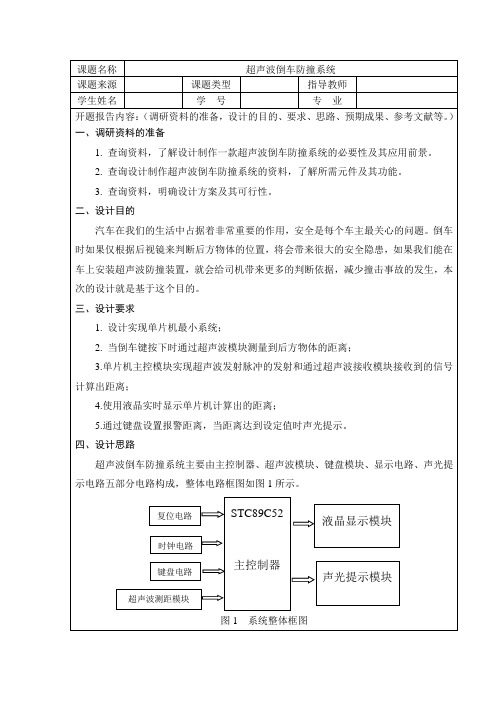
四、设计思路超声波倒车防撞系统主要由主控制器、超声波模块、键盘模块、显示电路、声光提示电路五部分电路构成,整体电路框图如图1所示。
图1 系统整体框图STC89C52主控制器复位电路 时钟电路 键盘电路超声波测距模块液晶显示模块声光提示模块五、预期成果1.外文文献翻译、开题报告、文献综述及毕业设计说明书。
2. 设计并制作硬件电路,使电路实现功能:当倒车按键按下时,单片机控制超声波发射模块发射脉冲,接收模块等待接收;单片机通过发射和接收的数据计算出距离,通过液晶模块显示距离,若距离小于设定值则进行声光提示。
可以通过键盘设置提示距离值。
六、参考文献[1].潘新民等.单片微型计算机实用系统设计1 北京:人民邮电出版社.1992[2].张毅刚,彭喜元,董继成.单片机原理与应用北京:高等教育出版社2008.2[3].马义德.汽车防撞系统的研究[J].交通管理,2004,(7)[4].郁有文,常建,程继江.传感器原理及工程应用西安:西安电子科技大学出版社2003[5].王红云.基于超声波测距的倒车雷达系统设计[J].自动控制与仪器仪表,2008[6].刘利.液晶显示原理,上海:电子工业出版社,2002.5,52-70[7].李丽霞.单片机在超声波测距中的应用.电子技术2002:117[8].戴日章.基于AT89C51单片机的超声波测距系统.电气时代,2005:246[9].董敏学.汽车倒车防撞防止系统设计.上海汽车,2001:143-149[10].李茂山.超声波测距原理及实践技术.实用测距技术北京:机械工业出版社。
基于单片机的汽车倒车雷达的设计与实现-开题报告

第四代:液晶荧屏动态显示。这一代产品有一个质的飞跃,特别是荧屏显示开始出现动态显示系 统。不用挂倒档,只要发动汽车,显示器上就会出现汽车图案以及车辆周围障碍物的距离。
二、设计(论文)的基本内容、拟解决的主要问题 为避免汽车在倒车过程中发生碰撞,设计了一种基于单片机的倒车雷达系统。介绍了超声测距
的基本原理,阐述了倒车雷达系统的结构组成、硬件电路设计以及软件设计,倒车距离采用 LCD 进行实时显示,并通过报警电路做出提示。
该系统由单片机控制电路、超声波发射和接收电路、LCD 显示电路以及报警电路等几部分组 成。单片机是整个系统的核心部件,协调各部分电路的工作。单片机在超声波信号发射的同时开 始计时,超声波信号在空气中传播,遇到障碍物后发生发射,反射的回波信号经过处理后 输入到单片机的外部中断口产生中断,单片机停止计时。通过单片机可得到超声通过单片机可得 到超声即可求得车体与障碍物之间的距离。系统配置了两路超声波电路,保证两路超声波信号同时 发射,分别用两个中断口来接收回波信号,从而分别测出两路倒车距离。倒车距离显示的是两路测距 值中的最小值,在达到设计要求的最小距离时系统产生报警。
第五代:魔幻镜倒车雷达。结合了前几代产品的优点,采用了最新仿生超声雷达技术,配以高速 电脑控制,可全天候准确地测知 2 米以内的障碍物,并以不同等级的声音提示和直观的显示提醒驾驶 员。魔幻镜倒车雷达把后视镜、倒车雷达、免提电话、温度显示和车内空气污染显示等多项功能整合 在一起,并设计了语音功能,是目前市面上最先进的倒车雷达系统。
三、技术路线(研究方法) 汽车倒车雷达系统结构框图 硬件设计和软件设计两部分。硬件系统主要由单片机控制电路、超声波和接收电路、LCD 显示 电路及报警电路等五部分组成。系统应用软件采用模块化设计思想,可对各子程序分别进行设计 和调试,然后将调试好的子程序块链接起来进行统调。系统软件模块划分为超声波测距模块、 LCD 显示模块和报警模块等几大功能模块。系统主控制器单片机实现如下基本功能:
基于单片机的倒车防撞报警系统设计

3.单片机通过发射和接收的数据计算出距离,通过液晶模块显示距离,若距离小于设定值则进行报警提示
4.可以通过键盘设置提示距离值
三、工作总体安排
2019年8月至2019年9月,开始选题,收集相关资料,然后拟定题目。
2019年10月1日至2020年1月初,查阅自己所涉及知识的相关资料,复习相关知识,初步完成各个模块的电路原理图设计。
二、主要研究内容和方法、步骤、预期目的
研究内容、方法和步骤
利用超声波电路原理,用C语言编写一个完整的测距系统,实现对靠近的物体进行测距。
一、超声波测距
1.当倒车键按下时通过超声波模块测量到后方物体的距离,单片机主控模块实现超声波发射脉冲的发射和通过超声波接收模块接收到的信号计算出距离。
2.温度传感器:超声波在空气中传播速度受环境温度的影响,根据声波在空气中的传播速度与温度的关系:V = 331.5 + 0.6t(m/s),温度越高,速度增大。
2020年1月至4月在老师指导下根据电路原理图,基本完成系统模型,并完成和改进论文
2020年5月初,完成毕业论文《基于单片机的倒车防撞报警系统设计》,准备毕业论文答辩。
四、指导教师意见:
签字:
年 月 日
备注:题目类别栏应填:应用研究、理论研究、艺术设计、程序软件开发等。
只要将此系统应用于社会交通运输业中一定会对减少交通事故的发生做出更突出的贡献。
国内外研究现状:
国际上对汽车防撞的研究开始于二十世纪六十年代,以德、美、日为代表的西方国 家内开始研究,与众多汽车制造厂商合作,制造出世界上第一批汽车防撞报警器。但局 限于当时器件的发展水平和单片机成本过高, 导致报警器难以做到体积轻巧、 结构简单、 价格便宜。此外,报警器的干扰因素很多,在实验室制造的样机,对许多干扰因素考虑 不全面,使在实际得应用中,防撞效果并不让众多研究者满意。
【最新精选】基于单片机的汽车防追尾碰撞报警系统设计的开题报告
安徽科技学院本科生毕业论文(设计)开题报告书【附加公文一篇,不需要的朋友可以下载后编辑删除,谢谢】关于进一步加快精准扶贫工作意见为认真贯彻落实省委、市委扶贫工作文件精神,根据《关于扎实推进扶贫攻坚工作的实施意见》和《关于进一步加快精准扶贫工作的意见》文件精神,结合我乡实际情况,经乡党委、政府研究确定,特提出如下意见:一、工作目标总体目标:“立下愚公志,打好攻坚战”,从今年起决战三年,实现全乡基本消除农村绝对贫困现象,实现有劳动能力的扶贫对象全面脱贫、无劳动能力的扶贫对象全面保障,不让一个贫困群众在全面建成小康社会进程中掉队。
总体要求:贫困村农村居民人均可支配收入年均增幅高于全县平均水平5个百分点以上,遏制收入差距扩大趋势和贫困代际传递;贫困村基本公共服务主要指标接近全县平均水平;实现扶贫对象“两不愁三保障”(即:不愁吃、不愁穿,保障其义务教育、基本医疗和住房)。
年度任务:2015-2017年全乡共减少农村贫困人口844人,贫困发生率降至3%以下。
二、精准识别(一)核准对象。
对已经建档立卡的贫困户,以收入为依据再一次进行核实,逐村逐户摸底排查和精确复核,核实后的名单要进行张榜公示,对不符合政策条件的坚决予以排除,确保扶贫对象的真实性、精准度。
建立精准识别责任承诺制,上报立卡的贫困户登记表必须经村小组长、挂组村干部、挂点乡干部、乡领导签字确认,并作出承诺,如扶贫对象不符合政策条件愿承担行政和法律责任,确保贫困户识别精准。
(二)分类扶持。
通过精准识别建档立卡的贫困户分为黄卡户、红卡户和蓝卡户三类,第一类为黄卡户,是指有劳动能力,家庭经济收入在贫困线边缘的贫困户;第二类为红卡户,是指有一定的劳动能力,家庭贫困程度比较深的贫困户;第三类为蓝卡户,是指年老体弱或因病因残丧失劳动能力的贫困户和五保户。
优先扶持黄卡户,集中攻坚扶持红卡户脱贫,对蓝卡户则通过保障扶贫来保障其基本生活。
(三)挂图作业。
根据贫困户的实际情况,分三年制定脱贫规划。
汽车基于单片机的汽车防盗报警系统开题报告
毕业设计(论文)开题报告1、课题的目的及意义1.1发展前景众所周知,汽车是当今世界主要的交通工具之一。
随着人民生活水平的不断提高,汽车越来越成为人们生活中不可缺少的一部分,从世界上第一辆T型福特车被盗开始,偷车已成为现今城市最常见的犯罪行为之一。
随着汽车数量的增加,特别是轿车正以很快的速度步入家庭,车辆被盗的数量逐年上升,这给社会带来极大的不安定因素,担心车辆被盗,成为困扰每一位汽车用户的难题。
人们为了车辆的安全大都安装了汽车防盗报警系统。
汽车防盗报警器的使用在很大程度上有效地保护了国家和人民生命财产的安全。
使人们有了安全的依靠。
同时车辆防盗报警器的使用也减少了盗窃犯罪事件的发生,起到了一定的威慑作用。
1.2选题的目的和意义随着科学技术的进步,为对付不断升级的盗车手段,人们研制开发不同方式结构的防盗器,目前防盗器发展按其结构和功能。
可以分为三大类:机械防盗——电子防盗——网络防盗。
机械防盗主要是靠锁定离合制动,油门或变速档来达到防盗目的,但只防盗不报警,目前市场已不多见,属淘汰落伍产品。
电子防盗是目前市场比较常见的防盗产品,其主要靠锁定点火或启动来达到防盗的目的。
随着科技的发展和技术的进步汽车防盗的至高点将是网络防盗。
无论车辆行驶到何处,随时处于自己的掌握之中,真正做到“车居四海皆安心”。
目前,用于汽车的防盗报警器种类繁多,功能也较单一,多数是汽车门被打开只有报警功能,切断点火电路汽车不能起动。
正是由于诸多的汽车防盗报警器起不到应有的保护作用方导致汽车开始安装防盗网,将乘客与司机隔开,以防不测,虽然有一定的效果,但作用不大,也不雅观,且给乘客造成不舒服感,同时安装价格也较昂贵,如果有行窃者盗窃汽车或汽车上的物品,防盗系统不仅具有切断起动电路、点火电路、喷油电路、供油电路和变速电路、将制动锁死等的功能,同时,还会发出不同的声光信号,给窃贼一个精神上的打击,以阻止窃贼行窃。
2、课题任务、重点研究内容、实现途径2.1课题任务本次设计主要是利用51单片机完成对汽车防盗报警系统的设计,主要要求如下:(1)设计分析汽车防盗报警系统的构成(2)设计汽车防盗报警系统的硬件系统(3)对汽车防盗报警系统进行软件编程(4)测试设计的每个模块功能,功能要求:对传感器的选择,传感器的稳定性。
汽车后侧防撞智能报警系统开题报告
第5周:收集资料,进行方案论证
第6—8周:硬件设计
第8—10周:软件设计
第11—13周:撰写报告
第16周:毕业设计答辩
4.指导老师意见:
指导教师签名:年月日
障碍物;能向司机及乘员提前发出即将发生撞车危险的信号,促使司机采取应急措施来应付特殊情况,避免损失。
随着现代社会工业化的发展,汽车这一交通工具正为越来越多的人使用,但是随之而来的问题也显而易见,那就是随着车辆的增多,交通事故的频繁发生,由此导致的人员伤亡和财产损失数目惊人。
对于公路交通事故的分析表明,80%以上的车祸忧郁驾驶员反应不及所引起的,超过65%的车辆相撞属于追尾相撞,其余则属于侧面相撞。奔驰汽车公司对各类交通事故的研究表明:若驾驶员能够提早1S意识到有事故危险并采取相应的正确措施,则绝大多数的交通事故都可以避免。
毕业设计(论文)开题报告
题目
汽车后侧防撞智能报警系统
1.目的及意义(含国内外的研究现状分析):
随着经济的发展与汽车科学技术的进步,公路交通呈现出行驶高速化,车流密集化和驾驶员
非职业化的趋势。同时,随着汽车工业的飞速发展,汽车的产量和保有量都在急剧增加。但公路发展、交通管理却相对落后,导致了交通事故与日俱增,城市里尤其突出。智能交通系统ITS是目前世界上交通运输科学技术的前沿技术,它在充分发挥现有基础设施的潜力,提高运输效率,保障交通安全,缓解交通堵塞,改善城市环境方面的卓越效能,已得到各国政府的广泛关注,中国政府也高度重视智能交通的研究开发玉推广应用。汽车防撞系统作为ITS发展的一个基础,它的成功与否对整个系统有这很大的作用。从传统上说,汽车的安全可以分为两个主要研究方向:一是被动式安全技术,即防止事故的发生,该方式是目前汽车安全研究的最终目的;二是主动式安全技术,即防止事故发生后的乘员保护。目前汽车安全领域被动安全研究较多,主要从安全气囊、ARS(防抱死系统)和悬架等方面着手,以保证驾乘人员的安全,从经济型和安全性两方面来说,这些被动措施是在事故发生时刻对车辆和人员进行保护,有很大的局限性,因而车辆的主动安全研究尤为重要,引出了本文研究的基于单片机的超声波测距系统。这个系统是一种可向司机预先发出视听语言信号的探测装置。它安装在汽车上,能探测企图接近车身的人,车辆或周围
基于单片机的汽车交通事故智能报警系统开题报告
高等教育自学考试本科毕业论文开题报告论文题目:基于单片机的汽车交通事故智能报警系统考生姓名:准考证号:专业层次:本科院(系):机械与动力工程学院指导教师:职称:讲师重庆科技学院二O一三年八月十日(3)没有报警模式的多样灵活:系统报警只限于一种,即人工按钮。
其不能实现系统自主分析处理数据。
1.2 ecall系统这是欧盟esafety计划中的一个项目。
所谓ecall系统,指的是在车辆内安装一个黑盒子,当汽车发生重大交通事故而击发安全气囊时,结合车上的GPS,系统能自动拨打欧盟国家统一的急救电话112,将急救呼叫信号以及事故车辆所在位置信息通过无线通讯网络以最快的速度传送给最接近出事地点的紧急事故处理中心。
在向外发送信息时ecall系统主要借助无线通信网络如3g、wlan(无限局域网)、UWB(超宽带)等技术。
2、第十二届“挑战杯”:汽车交通事故智能报警系统该系统是目前国内最先进的交通事故智能报警系统,但是这系统还存在许多问题:(1)关于交通事故报警和智能报警的理论研究多,但未见集智能定位事故地点、智能判断事主受伤程度、智能发送报警信息于一身的报警系统产品的研究与开发的文献报道;(2)见单一报警模式的文献报道,但未见事故发生后装置立即给相关部门报警和事故发生后系统延迟30秒智能判断事主情况决定报警等多种报警模式并存的文献报道;(3)见关于发送单一或多个报警信息的报警系统的文献报道,但本系统的报警信息更为全面。
其工作原理:利用安全气囊的震动传感器判断交通事故等级。
利用GPS定位器定出交通事故地点。
利用GSM模块传送交通事故地点、车牌号、车型、车主电话号码等信息至119、110、120等。
当遇到突发状况,系统未能自动报警,可按紧急按钮进行求救。
系统设置报警延迟时间,以判断车上人员受伤程度,以便车主在意识清醒的情况下自行决定报警与否,减少误报。
其硬件图如下图1所示图1 汽车交通事故智能报警系统硬件图本课题的任务、重点内容、实现途径任务:1、设计方案的论证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的汽车倒车防撞报警器开题报告开题报告内容与要求一、毕业设计(论文)内容及研究意义(价值)设计的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
此设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。
二、毕业设计(论文)研究现状和发展趋势(文献综述)通常的倒车雷达主要由感应器、主机、显示设备等三部分组成。
感应器发出和接受超声波信号,并将接收到的信号传输到主机,再通过显示设备显示出来。
感应器装在后保险杠上,以角45°辐射,检查目标,能探索到那些低于保险杠而司机从后窗又难以看见的障碍物并报警,如花坛,蹲在车后玩耍的儿童等:显示设备装在仪表板上,提醒驾驶员汽车据后面物体还有多少距离,到危险距离时,蜂鸣器就开始鸣叫,提示司机停车。
根据感应器种类不同,倒车雷达可分为粘贴式、钻孔式和悬挂式等种。
转帖式感应器后有一层胶,可直接粘在后保险杠上:钻孔式感应器是在保险杠上钻一个洞,然后把感应器嵌进去:悬挂式感应器主要用于载货车。
根据显示设备种类不同,倒车雷达又可以分为数字式、颜色式和蜂鸣式等三种。
数字式显示设备是一只如传呼机大小的盒子,安装在驾驶台上,直接用数字表示汽车与后面物体的距离,并可精确到1厘米,让驾驶员一目了然。
经过几年的发展,倒车雷达系统已经过了数代的技术改良,不管从结构外观上,还是从性能价格上,这几代产品都各有特点,目前使用较多的是数码显示、荧屏显示和魔幻镜倒车雷达这3种。
汽车倒车防撞测距报警器是国家八.五期间重点开发的重大科研项目之一。
以往的汽车倒车测距一般有四种:1嘀嘀声加闪光,2音乐声加闪光,3语音声加闪光,4倒车到危险距离时发出警报声的超声波倒车报警器。
由于很多研究都采用的是特殊难购的专用元件,使其难以推广,本设计采用国内生产的通用元件,成本较低廉。
本设计将以上功能结合起来加以改进发展,使其在整个倒车过程中自动测量车尾到最近障碍物的距离,并用数字显示出来,在倒车到极限距离时会发出急促的警告声,提醒驾驶员注意刹车,如果和制动系统联系在一起也可以形成自动刹车。
三、毕业设计(论文)研究方案及工作计划(含工作重点与难点及拟采用的途径)1.系统模块系统以微控制器AT89C51为核心,外围电路由超声波发射模块、超声波接收模块、声光报警电路、显示模块四部分组成2.系统工作过程驾驶员将手柄转到倒车档后,系统自动启动,超声波发送模块向后发射40kHz 的超声波信号,经障碍物反射,由超声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语. 音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m时,发出不同的报警声,提醒驾驶员停车。
3.各个模块的介绍(1)超声波发射模块,选用软件发生超声波法,利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
(2)超声波接收器包括超声波接收探头、信号放大电路及波形变换电路三部分。
探头变换后的正弦波电信号经放大电路放大并进行波形变换。
(3)声光报警是指当倒车雷达探测到的距离小于所设定的安全值时,发出声音、点亮发光。
倒车雷达的工作原理图测距工作原理硬件电路框图设计(论文)工作进度计划:第1周:布置课题和设计任务第2周:查阅资料,熟悉课题,写开题报告第3周:查阅资料,熟悉课题,写开题报告第4周:熟悉具体实现技术途径,确定开题报告第5周:进行开题报告会,硬件电路总体方案设计第6周:硬件电路总体方案设计第7周:硬件电路总体方案设计第8周:软件功能分析第9周:软件模块的确立,编写软件第10周:软件修改与完善第11周:软硬件调试第12周:继续调试,修改硬件电路和软件代码第13周:实现基本功能第14周:各种材料的总结,试验结果的分析第15周:毕业论文的撰写第16周:毕业论文的撰写第17周:毕业论文的修改第18周:准备答辩四、主要参考文献[1]童诗白,华成英.模拟电子技术基础[M],第三版.北京:高等教育出版,2001.1[2]阎石.数字电子技术基础[M],第四版.北京:高等教育出版社,1998.11[3]马忠梅,籍顺信.单片机的C语言应用程序设计[M],第三版. 北京:北京航天航空大学出版社,2003.11[4]曾光奇.工程测试技术基础[M],武汉:华中科技大学出版社,2002.6[5]罗四维.传感器应用电路详解[M],北京: 电子工业出版社,1993.6[6]滕志军.基于超声波检测的倒车雷达设计[EB/OL] /disp_art/1020005/17626.html,2006-10-04[7]何莉,曾宪文.基于PIC单片机的超声波测距系统[EB/OL]./PIC.htm, 2006-7[8]赵广涛,程荫杭.基于超声波传感器的测距系统设计[EB/OL]./html/ceshiyuceliang/20070223/9964.html, 2006-6[9]胡建恺.超声检测原理和方法 [M],合肥:中国科学技术大学出版社,1993.11[10]刘凤然.基于单片机的超声波测距系统 [J].信号与处理.2001,(5)[11]Silk M G.Ultrasonic transducers for nondestructive testing[M].Bristol:A.Hillier,1984[12]Lopez-Sanchez,Ana Lilia. Ultrasonic system models and measurements[M].America:Iowa State University,2005外文文献及翻译英文原文:Ultrasonic distance sensorDesign Principles:Ultrasonic sensor is developed from the use of the characteristics of ultrasonic sensors.Higher frequency ultrasound is a mechanical acoustic waves, the transducer excitation voltage of the chip occurs in the vibration, and it has a high frequency, short wavelength, diffraction is small, especially the direction of good, to be the ray and the orientationcommunication and so on.Ultrasound on liquids and solids through a great ability, especially in opaque solids in the sun, which can penetrate tens of meters in depth.Ultrasonic impurities or sub-interface will encounter a significant reflection reflection into the echo formation, hit moving objects can produce the Doppler effect.Therefore widely used in industrial ultrasonic inspection, defense, biomedical and other aspects of the ultrasound as a means of detection, must generate and receive ultrasound ultrasound.To fulfill this function the device is ultrasonic sensors, traditionally known as the ultrasonic transducer or ultrasonic probe.The main performance indicators of ultrasonic sensors:Ultrasound probe is the core of its plastic jacket or a piece of metal in the piezoelectric jacket.Constitute the chip can have many kinds of materials.Chip size, such as diameter and thickness also vary, so the performance of each probe is different, we used to know it in advance before the performance.The main performance indicators of ultrasonic sensors include: (1) operating frequency.Frequency is the resonant frequency of the piezoelectric wafer.When added to the AC voltage across it, and the frequency of the resonant frequency of the chip are equal, the maximum energy output, sensitivity is highest.(2) operating temperature.Since the Curie point of piezoelectric materials generally high, particularly when using the power of diagnostic ultrasound probe small, so the temperature is relatively low, you can work long hours without producing failure.Medical ultrasound probe temperature is relatively high, requiring a separate cooling device.(3) sensitivity.Depends primarily on manufacturing the chip itself.Electromechanical coupling coefficient, high sensitivity; the other hand, low sensitivitStructure and Working Principle:When voltage is applied to piezoelectric ceramic, it will with the voltage and frequency of changes in the mechanical deformation.On the other hand, when the vibration of piezoelectric ceramics, it will generate a ing this principle, when given by the two piezoelectric ceramic or a piezoelectric ceramic and a vibrator, sheet metal, the so-called bimorph element called the imposition of an electrical signal, it will emit ultrasonic vibration due to bending.Conversely, when applied to the bimorph ultrasonic devices, it will generate an electrical signal.Based on the above role, it can be used as apiezoelectric ceramic ultrasonic sensors.Such as ultrasonic sensors, a compound vibrator was flexibility on a fixed base.The vibrator is a composite resonator, and by a metal plate and a piezoelectric bimorph element consisting of a combination vibrator.Resonator and trumpets the purpose of effective radiation generated by the ultrasonic vibrations, and can effectively make ultrasonic vibrator gathered in a central location.Outdoor uses ultrasonic sensors must have a good seal in order to prevent dew, rain and dust intrusion.Piezoelectric ceramic is fixed on the top of the metal box inside the body.Base fixed in the open end of box, and covered with resin.Of ultrasonic sensors for industrial robots, the requirements to achieve an accuracy of 1mm, and has strong ultrasonic ponents using conventional bimorph bending vibration of the vibrator, in the case of frequencies above 70kHz, it is impossible to achieve this purpose.Therefore, in the high-frequency probe, you must use the vertical thickness vibration mode piezoelectric ceramic.In this case, the acoustic impedance of piezoelectric ceramics and the air becomes very important match.Acoustic impedance of piezoelectric ceramic 2.6 ×107kg/m2s, while the acoustic impedance of air is 4.3 × 102kg/m2s.5 different power piezoelectric vibration will result in substantial losses of radiation on the surface.Adhesion of a special material on the piezoelectric ceramic, matching layers, as the sound can be achieved with air impedance match.This structure allows up to several hundred kHz ultrasonic sensors in the frequency of the circumstances, still be able to work properly.Ultrasonic distance sensor technology and application of the principle:Ultrasonic distance sensor can be widely used in Level (level) monitoring, robot collision avoidance, a variety of ultrasonic proximity switches, and related areas such as anti-theft alarm, reliable, easy installation, waterproof, small launch angle, high sensitivity,display instruments to facilitate connections with industry, also provides a larger probe launch angle.1, ultrasonic range finder: ultra-high energy acoustic ranging techniques to ultrasonic distance measurement techniques have been major breakthroughs, it not only broadens the applications of ultrasonic distance measurement technology (for very poor working conditions), and the use of smart regulation technology,greatly improve the reliability of ultrasonic products, and performance indicators, allowing users to worry about without looking back.Excellent echo processing technology ,5-50KHZ of ultra high strength level meter wave frequency to the maximum range up to 120 meters for medium temperature is -20 ℃ - +175 ℃.Intelligent automatic adjustment made wave frequency, automatic temperature compensation function to work more stable and reliable.HpAWK series also has a flexible work (the power supply for 12VDC, 24VDC, 110VAC, 220VAC; two / three / four-wire system can be freely combined in the same instrument.It also has advanced remote GSM,CDMA, Internet debugging features, enabling users to readily available technical support.中文翻译超声波距离传感器设计原理超声波传感器是利用超声波的特性研制而成的传感器。