转向角传感器输出学习
汽车传感器测量实训报告

一、实习目的本次汽车传感器测量实训旨在通过实际操作,让学生掌握汽车传感器的原理、构造和测量方法,提高学生的动手能力和实践技能。
通过实训,使学生能够熟练使用传感器测量工具,对汽车传感器进行故障诊断和性能检测,为以后从事汽车维修、检测等相关工作打下坚实基础。
二、实习内容1. 汽车传感器原理及分类首先,我们学习了汽车传感器的原理和分类。
汽车传感器是汽车电子控制系统中的关键部件,它将各种物理量转换为电信号,为电子控制系统提供信息。
汽车传感器主要分为以下几类:(1)温度传感器:如发动机冷却液温度传感器、进气温度传感器等。
(2)压力传感器:如油压传感器、进气压力传感器等。
(3)速度传感器:如转速传感器、车速传感器等。
(4)位置传感器:如转向角传感器、节气门位置传感器等。
2. 传感器测量工具及使用方法在实训过程中,我们了解了各种传感器测量工具,如万用表、示波器、数据采集器等。
以下列举几种常用工具的使用方法:(1)万用表:用于测量传感器的电阻、电压和电流等参数。
(2)示波器:用于观察传感器输出信号的波形,分析信号特性。
(3)数据采集器:用于采集传感器输出信号,并通过计算机进行分析和处理。
3. 汽车传感器测量实训(1)温度传感器测量:以发动机冷却液温度传感器为例,使用万用表测量传感器线圈的电阻值,并与标准电阻值进行对比,判断传感器是否正常。
(2)压力传感器测量:以进气压力传感器为例,使用示波器观察传感器输出信号的波形,分析信号特性,判断传感器是否正常。
(3)速度传感器测量:以转速传感器为例,使用数据采集器采集传感器输出信号,通过计算机分析处理,判断传感器是否正常。
4. 故障诊断与性能检测在实训过程中,我们还学习了汽车传感器故障诊断和性能检测的方法。
通过实际操作,学生能够熟练掌握以下技能:(1)分析传感器输出信号,判断传感器是否正常。
(2)根据传感器输出信号,判断汽车电子控制系统是否存在故障。
(3)根据故障现象,确定故障原因,并提出相应的维修措施。
电子方向机工作原理

电子方向机工作原理
电子方向机(Electronic Power Steering,EPS)是一种使用电子控制系统来辅助驾驶员操控方向盘的设备。
其工作原理主要包括以下几个步骤:
1.方向盘转动:当驾驶员转动方向盘时,操作传感器(如转角传感器)会检测到转动的角度与方向。
2.传感器信号输出:传感器将检测到的方向盘角度和方向的信号转化为电信号,并将其发送到控制单元。
3.控制单元计算:控制单元接收到传感器信号后,根据车辆的行驶状态、速度以及驾驶员的操作意图进行计算,确定所需的转向力。
4.电机输出:控制单元通过输出信号驱动电机,产生对应的转向力。
根据车辆的情况,电机可以是直流电机(DC)或者是无刷直流电机(BLDC)。
5.转向力传递:电机输出的转向力通过机械齿轮或者电子装置传递给悬挂系统或汽车转向系统。
转向系统通过转向拉杆或者齿轮将转向力传递给车轮,从而改变车辆的行驶方向。
6.反馈与调节:EPS系统还可以通过传感器监测车辆的行驶状态和驾驶员的操作行为,并根据需要调整输出的转向力,以提供更加精准和舒适的驾驶操控体验。
通过这些步骤,电子方向机能够辅助驾驶员进行方向操控,提供更轻便、精准和舒适的转向操作。
转向角传感器工作原理

1.转向角传感器工作原理是什么?
答:汽车电机控制模块选用的转向角传感器主要是由光耦合器.打孔槽板等构成的,原理是根据电阻器认知汽车转向的角度,更改电阻器的尺寸,进而使汽车的工作电压更改完成的。
转向角传感器是用来检验方向盘旋转角度和旋转方位的设备,汽车的转向角传感器是用来检验方向盘旋转角度和旋转方位的,当方向盘左拐或是右拐都是会被转向传感器检验进而使汽车的电机控制模块传出恰当的转向命令。
转向角传感器是用以明确轴的部位的机器设备,传感器内的电磁线圈组成包含发送器电磁线圈和最少一个信号接收器进程,汽车电机控制模块根据转向角传感器的数据信号分辨方向盘的转向角度,旋转角度和转速比。
方向盘旋转方位,方向盘旋转角度,方向盘旋转速率。
方向盘转向角传感器的数据采集系统设计
方向盘转向角传感器的数据采集系统设计作者:何润东潘盛辉韩峻峰孟德良来源:《现代电子技术》2011年第19期摘要:通过对方向盘转向角传感器的分析,设计了转向角传感器的数据采集系统,并且设计了相应的外围辅助电路,通过ARM读取传感器中的数据,对方向盘转向角,方向盘转向角速度以及转动方向这三个参数进行数据采集。
这些参数为汽车自适应前照灯控制,以及助力转向系统提供了方向盘转向角相关信息,为了便于对采集到的数据进行分析,方向盘转向角传感器采集到的数据通过串口送到上位机上,并且利用Matlab对采集的数据进行分析处理。
关键词:方向盘转向角传感器; 数据采集; ARM; Matlab中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2011)19-0116-03Data Acquisition System of Steering Wheel Angle SensorHE Run- PAN Sheng---(1. Department of Electronic Information and Control Engineering, Guangxi University of Technology, Liuzhou 545006, China;2. Department of Electrical Engineering, Guangxi College of Vocational and Technical, Nanning 530007, China)Abstract: Through the analysis of steering wheel angle sensor, data acquisition system of steering angle sensor and the corresponding external auxiliary circuit were designed. Through reading the data from sensor with ARM, the data acquisition was performed with parameters of steering wheel, steering wheel angular velocity and rotation direction. These parameters provided related information of steering wheel angle for the control of automotive adaptive headlamps and the power steering system. In order to analyze the collected data, the data of steering wheel angle sensor was sent to the host computer through the serial port, and the collected data were processed through Matlab.Keywords: steering wheel angle sensor; data acquisition; ARM; Matlab自适应前照明系统(AFS),是一种能适应各种不同环境条件的智能前照灯系统[1-2],获得汽车在转弯处的参数,如:转向角,角速度以及转向,是汽车前向灯自适应控制的前提条件[3]。
转向角传感器工作原理

转向角传感器工作原理
转向角传感器是一种能够测量物体旋转角度的传感器,广泛应用于航空航天、汽车、船舶等领域。
它通过检测物体相对于参考方向的旋转角度,可以帮助控制系统准确地获取目标物体的姿态信息,进而实现精确的控制。
转向角传感器的工作原理主要基于惯性测量和电子学技术。
在传统的机械式转向角传感器中,通常采用陀螺仪或加速度计等惯性元件来感知物体的旋转运动。
当物体发生旋转时,惯性元件会受到作用力的影响而产生相应的信号输出,通过电子电路进行处理后,就可以得到物体的转向角度信息。
随着技术的不断发展,现代转向角传感器大多采用MEMS(Micro-Electro-Mechanical Systems)技术制造,具有体积小、功耗低和响应速度快等优点。
这些传感器通常集成了陀螺仪、加速度计、磁力计等多种传感器元件,通过复杂的算法处理,可以实现更加精确的转向角度测量。
在实际应用中,转向角传感器通常与其他传感器或系统结合使用,例如与GPS、惯性导航系统(INS)等配合,以提高姿态测量的准确性和稳定性。
通过不断优化传感器的设计和算法,现代转向角传感器已经可以实现高精度的姿态测量,广泛应用于飞行器、汽车稳定控制、工业机器人等领域。
总的来说,转向角传感器是一种重要的姿态传感器,它通过测量物体的旋转角度,帮助控制系统获取准确的姿态信息,实现精确的控制。
随着技术的不断进步,转向角传感器在各个领域都有着广泛的应用前景,将为人类的生活和工作带来更多便利和安全。
汽车主动安全ESP系统故障诊断-4.1
3)检测轮速传感器连接线 路,如图5-23。
点火开关OFF,脱 开传感器及电控单元线 束连接器。用万用表检 测“3”—“2G2”、“5”— “2G1”端子之间及对地电 阻,检测方法及结果如 图所示。否则,应进一 步检测导线是否有短路 、断路或搭铁故障。
图5-23 检测轮速传感器连接线路
4)检测轮速传感器电控单元电路,如图5-25。 装回电控单元线束连接器,脱开传感器线束连接器。点火
如果控制单元失效(一般不太可能),那么制动系统仍可 发挥普通制动系统的作用,但ABS、EDS、 EBV、MSR、ASR及 ESP不起作用。
3)、液压控制装置
1、为了提高响应速度,汽车ESP控制系统的液压调节器 比ABS/ASR液压调节器多了预压泵(Precharg e Pump,PCP)和压力生成器( Pressure Generato r Assembly,PGA)。
湿滑路面:低速行驶
砂石路面:ESP频繁介入,加快制动系统磨损,建议关闭ESP系统。
低速脱困:关闭ESP系统(会产生纵向减速力,影响脱困。
2、ESP系统的受力分析
前轴侧滑出现“驶出” 现象
抑制前轮侧滑
加大内侧车轮的 制动力
5
后轴侧滑出现甩 尾现象
抑制后轮侧滑
加大外侧车轮 的制动力
6
各个车轮制动力控制的效果
7
总结
1、当后轴要侧滑之际,可在前外轮上施加制动力,产生一个向外侧的横 摆力偶矩。这个横摆力偶矩是随着制动力的增大而逐步加大的。便于控制, 也能有效的抑制后轮侧滑。 2、若发生前轮侧滑,应该施加适度向内侧的横摆力偶矩和制动力。 3、然而,制动前内轮、后内轮或后外轮均能产生向内侧的横摆力偶矩, 但是随着制动力的增加:
使用元征X-431进行宝马X5_E53转向角传感器设码学习
使用元征X-431进行宝马X5_E53转向角传感器设码学习作者:暂无来源:《汽车维修与保养》 2017年第10期X-431 PRO 系列产品是元征公司基于安卓系统研发的一系列高性价比的汽车故障诊断设备,可覆盖市场上98% 以上的车型,并对车辆进行全系统诊断,支持读码、清码、读数据流、动作测试及常用特殊功能。
功能说明一般来说,当车辆更换转向角传感器后,需要先设码,然后进行匹配。
注意事项开始测试前,请遵循以下这些说明:1.如果车辆具有手动变速箱,请踩下并松开离合器踏板。
2.车辆静止。
3.必须应用驻车制动器。
4.对于手动变速箱,将变速杆换到空档位。
5.对于自动变速箱,将变速杆换到 P位置。
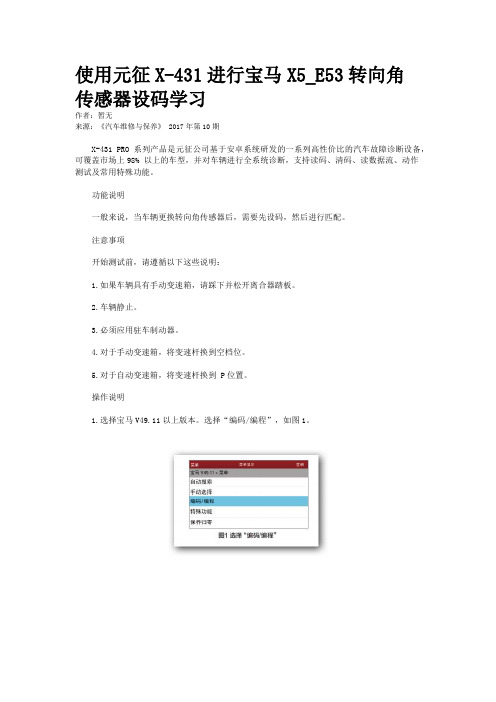
操作说明1.选择宝马V49.11以上版本。
选择“编码/编程”,如图1。
2 . 按步骤选择“ X 系列”、“ X 5 _E53(1999年以后)”,如图2。
3.选择“编码/编程”,如图3。
4.确认“16PIN接头”,如图4。
5.确认E53底盘。
6 .选择“防盗器( E WS)和仪表板(KMB/IHK)都没更换”,如图5。
7.选择“LWS[转向角传感器]”,如图6。
8.显示车辆命令,执行编码过程。
9.选择“重新编码”。
10.注意提示信息:关闭点火开关。
等待15s。
打开点火开关,控制单元,选择“立即执行重新编码”。
11.进入数据刷写后,编码结果提示已成功执行。
12.按照指示选择“特殊功能”、“X系列”、“X5_E53(1999年以后)”,最后选择“转向角学习”,如图7。
13.选择“[2]运行转向角传感器”,如图8。
14. 选择确定执行方向盘传感器匹配,点击“是”。
15.提示“使车轮处于正前方位置”,点击“确定”。
16.按要求正确执行之后,选择“转向角度传感器匹配程序已正确执行”。
17.匹配结果提示功能完成。
清除故障码,然后关闭钥匙,退出软件。
2017年奥迪Q3转向角传感器的基本设置

54-CHINA ·March栏目编辑:高中伟******************服务热线:4000 666 6662017年奥迪Q3转向角传感器的基本设置车型信息一辆2017年的奥迪Q 3,车辆的V I N 码为LFV2B28U4H3******。
功能作用更换方向盘游丝或者更换转向助力系统控制模块后,仪表亮故障灯或者报相关故障后需执行此功能。
支持产品元征PRO或PAD系列综合诊断设备。
本文案例测试产品为元征X-431 PAD V。
操作步骤1.2017年奥迪Q3,更换方向盘游丝后,仪表报一系列故障灯(图1)。
图1 仪表上的故障灯2.选择“X-431 PAD V”设备,选择“奥迪”软件,连接进入后选择“智能检测”,扫描全车系统(图2)。
图2 扫描全车系统3.选择“03制动电子装置”(图3)。
图3 选择“03制动电子装置”4.读取到如下故障码(图4)。
图4 读取故障码5.选择系统列表上的“引导型功能”(图5)。
图5 选择系统列表上的“引导型功能”6.根据车辆铭牌,选择车型信息后,点“开始”(图6)。
图6 选择车型信息7.选择“03制动电子装置”(图7)。
图7 选择“03制动电子装置”8.选择右上角的“引导型功能”(图8)。
Copyright ©博看网. All Rights Reserved.栏目编辑:高中伟******************检测技术及设备图8 选择右上角的“引导型功能”9.选择“03-转向角传感器-G85基本设置”(图9)。
图9 选择“03-转向角传感器-G85基本设置”10.点“继续/完成”。
11.点“是”执行基本设置(图10)。
图10 点“是”执行基本设置12.显示执行进度,耐心等待。
13.阅读提示,点“继续/完成”(图11)。
图11 阅读提示14.提示“左右转动方向盘,摆正后在平地上以不超过20km/h速度行驶一段距离,然后停下,车辆摆正不移动方向盘”,点“是”(图12)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转向角传感器输出学习
元征软件TOYOTA开发工程师 李永帅
这个功能在X431 TOYOTA软件的EHPS/EMPS系统的工作支持菜单中,可用TOYOTA-16接头或CAN BUS接头。
下面是对X431操作以及必要的说明,供参考:
图1
执行该功能的时机或条件:当更换了转向执行器或者ECU后需执行该功能,否则不需要。
该功能实际上包括转向角传感器学习和扭矩传感器学习两个过程。
在实施该功能之前,请确认没有故障码存储。
如果要确认做此功能,请点击图1功能菜单,进入步骤 1/7,如图2所示:
图2 图3
当满足此条件后按”确定”按钮进入图3所示步骤 2/7,按提示进行操作,该步骤操作可以完成执行传感器学习值的初始化,请注意:要处于点火ON(HV车处于READY ON状态),车速为0KM/H状态,才能点“OK”,执行该步骤操作。
完成该步骤操作后进入如下图4所示步骤 3/7:
图4 图5
该步骤提示您,执行传感器学习值初始化结束,在您将点火开关OFFÆON后,点击“确定“按钮,进入图5所示步骤 4/7,按提示进行操作,该步骤操作可以
完成转向角传感器学习,请注意:方向盘和前轮胎必须在直进位置上,在满足该条件下,点击“确定”按钮进入如图6所示步骤 5/7:
图6 图7
请您按照图6提示执行操作成功后,画面自动会转入步骤如图7所示步骤 6/7,该操作进行扭矩传感器零点修正,注意:修正时请勿转动方向盘,点击“确定”执行该操作后,将进入下一步骤 7/7,如图8:
图8
提示您扭矩传感器0点修正完成,到此转向角传感器输出学习成功完成,点击“确定”按钮退出该操作。