空间任意力系平衡
合集下载
空间力系的平衡
所示,重力G与三轮地面反力FNA、FNB、FNC构成空间平行力系。 (2) 选取坐标系Hxyz(点H为坐标原点)。 (3) 列平衡方程求解。
∑Mx(Fi)=0 FNC·CH-G·ED=0 ∑My(Fi)=0 G·EF+FNB·HB-FNA·AH=0 ∑Fz=0 FNA+FNB+FNC-G=0
解得:FNA=0.95 kN, FNB=0.05 kN, FNC=0.5kN
力对轴之矩等于零的情形:① 当力与轴相交时(d=0), ② 当力与轴平行时(Fxy=0)。即当力与轴共面时,力对轴之 矩为零。
第3章 空间力系的平衡
z
z
+
-
z -+
图 3.6
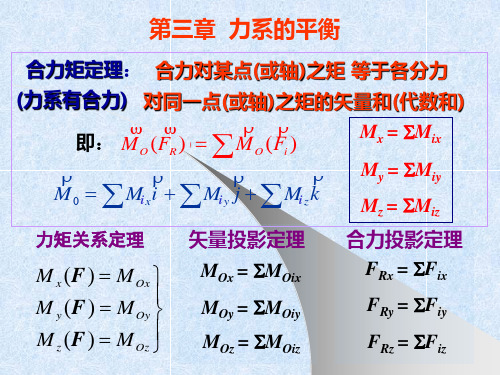
第3章 空间力系的平衡 3.2.2 合力矩定理
设有一空间力系F1、F2、…、Fn,其合力为FR,则合力对 某轴之矩等于各分力对同轴之矩的代数和,表达式为
第3章 空间力系的平衡
C
D 45° B
45 ° FB
45 °
FC O
G
A
(a)
G2
0.8 m C G
1
0.6 m 0.6 m
0.2 m
A NA
NC B
2m
NB
(b)
160 200 160
FAz Fr2 A
Ft2 r2 r1
FB2 B
FAx
Fr1 F FBx
t1
(c)
图 3.1
第3章 空间力系的平衡
5 4 68.6N 34 5
F3y F3 cos cos 100
5 3 51.5N 34 5
F3z F3 sin 100
3 51.5N 34
第3章 空间力系的平衡 (2) 计算力对轴之矩。
∑Mx(Fi)=0 FNC·CH-G·ED=0 ∑My(Fi)=0 G·EF+FNB·HB-FNA·AH=0 ∑Fz=0 FNA+FNB+FNC-G=0
解得:FNA=0.95 kN, FNB=0.05 kN, FNC=0.5kN
力对轴之矩等于零的情形:① 当力与轴相交时(d=0), ② 当力与轴平行时(Fxy=0)。即当力与轴共面时,力对轴之 矩为零。
第3章 空间力系的平衡
z
z
+
-
z -+
图 3.6
第3章 空间力系的平衡 3.2.2 合力矩定理
设有一空间力系F1、F2、…、Fn,其合力为FR,则合力对 某轴之矩等于各分力对同轴之矩的代数和,表达式为
第3章 空间力系的平衡
C
D 45° B
45 ° FB
45 °
FC O
G
A
(a)
G2
0.8 m C G
1
0.6 m 0.6 m
0.2 m
A NA
NC B
2m
NB
(b)
160 200 160
FAz Fr2 A
Ft2 r2 r1
FB2 B
FAx
Fr1 F FBx
t1
(c)
图 3.1
第3章 空间力系的平衡
5 4 68.6N 34 5
F3y F3 cos cos 100
5 3 51.5N 34 5
F3z F3 sin 100
3 51.5N 34
第3章 空间力系的平衡 (2) 计算力对轴之矩。
第四章:力系的平衡条件与平衡方程
未知量个数 <= 独立平衡方程数 静定
(全部未知量可以由平衡方程完全求解)
未知量个数 > 独立平衡方程数 静不定或超静定
(未知量不能全部由平衡方程求解)
物体系的平衡·静定和超静定问题
未知量个数 <= 独立平衡方程数 静定
(全部未知量可以由平衡方程完全求解)
未知量个数 > 独立平衡方程数 静不定或超静定
∑ M B = 0 −8FAy + 5*8 +10*6 +10* 4 +10* 2 = 0
得 FAy = 20kN ∑ Fiy = 0 FAy + FBy − 40 = 0
得 FBy = 20kN
求各杆内力
取节点A
⎧⎪∑ ⎨⎪⎩∑
Fiy Fix
= =
0 0
→ →
FAD FAC
取节点C
⎧⎪∑ ⎨⎪⎩∑
解得 P3max=350kN
22mm 22mm
所以,平衡载重P3取值范围为:
75kN ≤ P3 ≤ 350kN
(2)P3=180kN时:
∑ M A = 0 4P3 − 2P2 −14P1 + 4FB = 0
解得 FB=870kN
∑ Fy = 0 FA + FB − P1 − P2 − P3 = 0
∑M =0
FA'
⋅r
sinθ
− M2
=
0
解得 M 2 = 8kN ⋅m
FB = FA = 8kN
例
已知:OA=R,AB=
l,
r F
,
不计物体自重与摩擦,系统在图示位置平衡;
求: 力偶矩M 的大小,轴承O处的约 束力,连杆AB受力,滑块给导 轨的侧压力.
第三章力系的平衡介绍

工 程 力 学
§3-2
平面力系的平衡条件
F1 Fn F3
1、平面任意力系的平衡方程 F2 平面任意力系平衡的充要条件是: 力系的主矢和对任意点的主矩都等于零。
0 FR
第 三 章 力 系 的 平 衡
Mo 0
平面任意力系
FR ( Fx ) 2 ( Fy ) 2
M O M O (F )
2
0
F
x
0,
F
y
0,
F
z
0
即:汇交力系的平衡条件是力系中所有各力在各个坐
标轴中每一轴上的投影的代数和分别等于零。
工 程 力 学
三、空间平行力系的平衡方程
第 三 章 力 系 的 平 衡
F
z
0,
M (F ) 0, M (F ) 0
x
y
工 程 力 学
四、空间力偶系的平衡方程
第 三 章 力 系 的 平 衡
工 程 力 学
例:如图所示为一种起吊装置的结构简图。图中尺寸d , 载荷F, <FAD =60均为已知。若不计各杆自重,试求杆AF与杆AD在各 自的约束处所受的约束力。
第 三 章 力 系 的 平 衡
工 程 力 学
第 三 章 力 系 的 平 衡
工 程 力 学
例:滑轮支架系统如图所示。已知G,a,r,θ ,其余物体重 量不计,试求A和B的约束力。
工 程 力 学
3、平面汇交力系的平衡方程
F
x
0,
F
y
0
4、平面力偶系的平衡条件
第 三 章 力 系 的 平 衡
M 0
即:力偶系各力偶力偶矩的代数和等于零。
工 程 力 学
空间力系的合成与平衡简介

M M
x y
(Fi (Fi
) )
0 0
M z (Fi ) 0
(3-31)
【例3-18】用图3-41a 所示的三铰架ABCD 和铰车E 起吊重G = 30 kN 的重物。三铰 架的无重杆在D 点用铰链连接,另一端铰接在地面上。各杆和绳索DE 与地面成 60o角, ABC 为一等边三角形,求平衡时各杆所受的力。
图3-38
于是可得结论:空间任意力系向一点简化,一般可得一个力和一力 偶。此力称为原力系的主矢,其值等于原力系中各力的矢量和,并作用 于简化中心;此力偶称为原力系的主矩矢,其值等于原力系中各力对简 化中心O点的矩的矢量和,如图3- 38c 所示。
图3-38
1.主矢 F 'R的计算 空间任意力系的主矢的大小和方向可用解析式求得
Fx Fy
0 0
Fz
0
(3-30)
图3-39
2. 空间平行力系的平衡方程
设图3-40所示的物体受一空间平行力系作用。令z 轴与力系各力作用线平行。则力系各力对z 轴之矩恒为 零;又因力系各力作用线平行于z 轴,必垂直于x 轴和y 轴,则各力对两坐标轴上的投影又恒为零,即
M z (Fi ) 0, Fx 0, Fy 0
Fz 0, ( FA + FB + FC FT ) cos 30o G 0 (d)
将式(a) 代入式(b)~ 式(d) ,解得
FA = FB 31.5 kN FC 1.55 kN
结算结果为负,假设力的方向与实际力的方向相反,三杆均受压力作用。
图3-41
【例3-19】图3-42所示的一三轮平板货车,其自重G=5 kN,载重货物重量 W=10 kN,各力作用点位置如图3-42 所示。求三轮平板货车处于静止时地面 对轮子的反力。
2、空间力系平衡、重心

解:取铰D 脱离体, 为 脱离体, 画受力图如 所示, 图b所示, 各力形成空 间汇交力系。 间汇交力系。
由ΣFx =0, cos60 sin60 60ºsin60º+ cos60 sin60 60ºsin60º= -NADcos60 sin60 + NBDcos60 sin60 =0 NAD=NAD 得 由ΣFy =0, Tcos60 +NCDcos60 -NADcos60 cos60 -NBDcos60 cos60 =0 cos60º+ cos60º- cos60ºcos60 cos60º- cos60ºcos60 cos60º=0 FG+NCD-0.5NAD-0.5NBD=0 得 由ΣFz =0, NADsin60 +NCDsin60 +NBDsin60 ―T sin60 ―FG=0 sin60 60º+ sin60 60º+ sin60 60º― sin60 60º― 866( 866+ 得 0.866(NAD+ NCD+ NBD)-(0.866+1)FG=0 联立求解得 NAD =NBD =31.55kN , NCD=1.55kN。 。
球形铰链
2、向心轴承 、
4、 、 向 心 推 力 轴 承
6、空间固定端 、
例 3 - 3 : 用三角架 ABCD 和绞车提升一重物如图 所示。 为一等边三角形, 所示。设ABC为一等边三角形,各杆及绳索均与水 平面成60 的角。 60º的角 30kN, kN,各杆均为二力 平面成60 的角。已知重物FG=30kN,各杆均为二力 滑轮大小不计。 杆 , 滑轮大小不计 。 试求重物匀速吊起时各杆所 受的力。 受的力。
[例] 已知: RC=100mm, RD=50mm,Px=466N, Py=352N, Pz=1400N。求: 例 平衡时(匀速转动)力Q=?和轴承A , B的约束反力?
C·A上传 【理论力学】第三章 力系的平衡
BE CE FDC =0 0; ∑ Fix =FDB DB DC
FDC FDB
P
BE = CE DB = DC 则:FDB = FDC
DO DO DO ∑ Fiy FDB = 0; FDC FDA =0 DB DC DA
cm DB = 20 3, , DA = 20 5;cm
FDA
EO AO 0; ∑ Fiz = FDB 2 FDA P=0 DB DA
汇交力系
√2 FA = FC = — F = FB 力多边形自行封闭
2
r F r F
C
B
r FB
例3-2:已知物体的重量为 .求:(a)平衡时铅垂力 , - :已知物体的重量为P )平衡时铅垂力F, (b)维持平衡时 的最小值及其相应方向.不计构件自重. )维持平衡时F 的最小值及其相应方向.不计构件自重. 讨论题
3 联立求解 FDA = P = 745N , 3 FDB = FDC = 289N
避免解联立方程 改变坐标方向
立柱AB与绳 与绳BC 例3-8:起重机起吊重量 =1kN.求:立柱 与绳 ,BD,BE - :起重机起吊重量P . x' 的受力. 的受力.
解: B点有四个未知力汇交, 点有四个未知力汇交, 点有四个未知力汇交
§3-1 汇交力系的平衡 -
汇交力系简化的结果
汇交力系平衡的充要条件: 汇交力系平衡的充要条件: 充要条件 力系的合力等于零
r FR = 0
各力全部 汇交力系平衡的几何条件 力多边形自行封闭 首尾相连 几何条件: 汇交力系平衡的几何条件: 仅适用于平 力多边形法则 解析条件: 汇交力系平衡的解析条件 平衡方程 汇交力系平衡的解析条件: 面汇交力系 几何法 空间汇交力系: 合力投影定理
FDC FDB
P
BE = CE DB = DC 则:FDB = FDC
DO DO DO ∑ Fiy FDB = 0; FDC FDA =0 DB DC DA
cm DB = 20 3, , DA = 20 5;cm
FDA
EO AO 0; ∑ Fiz = FDB 2 FDA P=0 DB DA
汇交力系
√2 FA = FC = — F = FB 力多边形自行封闭
2
r F r F
C
B
r FB
例3-2:已知物体的重量为 .求:(a)平衡时铅垂力 , - :已知物体的重量为P )平衡时铅垂力F, (b)维持平衡时 的最小值及其相应方向.不计构件自重. )维持平衡时F 的最小值及其相应方向.不计构件自重. 讨论题
3 联立求解 FDA = P = 745N , 3 FDB = FDC = 289N
避免解联立方程 改变坐标方向
立柱AB与绳 与绳BC 例3-8:起重机起吊重量 =1kN.求:立柱 与绳 ,BD,BE - :起重机起吊重量P . x' 的受力. 的受力.
解: B点有四个未知力汇交, 点有四个未知力汇交, 点有四个未知力汇交
§3-1 汇交力系的平衡 -
汇交力系简化的结果
汇交力系平衡的充要条件: 汇交力系平衡的充要条件: 充要条件 力系的合力等于零
r FR = 0
各力全部 汇交力系平衡的几何条件 力多边形自行封闭 首尾相连 几何条件: 汇交力系平衡的几何条件: 仅适用于平 力多边形法则 解析条件: 汇交力系平衡的解析条件 平衡方程 汇交力系平衡的解析条件: 面汇交力系 几何法 空间汇交力系: 合力投影定理
理论力学第3章
Pz Psin45 Pxy Pcos45 Px Pcos45sin60 Py Pcos45cos60
理论力学
中南大学土木建筑学院
7
mz (P )mz (P x )mz (P y )mz (P z )6Px (5Py )0 6Pcos45sin605Pcos45cos6038.2(Nm)
mx (P )mx (P x )mx (P y )mx (P z )006Pz 6Psin4584.8(Nm)
由 mA (Fi ) 0
P2a N B
3a0,
N B
2P 3
X 0
XA 0
Y 0
YB NB P0,
YA
P 3
理论力学
中南大学土木建筑学院
22
二、平面平行力系平衡方程 平面平行力系的平衡方程为:
Y 0
mO (Fi )0
一矩式
实质上是各力在x 轴上的投影恒 等于零,即 X 0 恒成立, 所以只有两个独立方程,只能 求解两个独立的未知数。
一、空间任意力系的平衡充要条件是:
R '0F 0 M O mO (Fi )0
又 R' (X )2 (Y )2 (Z )2
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0 Z 0,mz (F )0
再研究轮
mO (F )0
SAcosRM 0 X 0
X O SAsin 0
Y 0
S Acos YO 0
M PR XO P tg YO P
[负号表示力的方向与图中所设方向相反]
理论力学
中南大学土木建筑学院
理论力学
中南大学土木建筑学院
7
mz (P )mz (P x )mz (P y )mz (P z )6Px (5Py )0 6Pcos45sin605Pcos45cos6038.2(Nm)
mx (P )mx (P x )mx (P y )mx (P z )006Pz 6Psin4584.8(Nm)
由 mA (Fi ) 0
P2a N B
3a0,
N B
2P 3
X 0
XA 0
Y 0
YB NB P0,
YA
P 3
理论力学
中南大学土木建筑学院
22
二、平面平行力系平衡方程 平面平行力系的平衡方程为:
Y 0
mO (Fi )0
一矩式
实质上是各力在x 轴上的投影恒 等于零,即 X 0 恒成立, 所以只有两个独立方程,只能 求解两个独立的未知数。
一、空间任意力系的平衡充要条件是:
R '0F 0 M O mO (Fi )0
又 R' (X )2 (Y )2 (Z )2
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0 Z 0,mz (F )0
再研究轮
mO (F )0
SAcosRM 0 X 0
X O SAsin 0
Y 0
S Acos YO 0
M PR XO P tg YO P
[负号表示力的方向与图中所设方向相反]
理论力学
中南大学土木建筑学院
大学理论力学__空间力系的平衡方程
二力矩式
X 0
M A 0
MB 0
条件是:AB两点的连线不能与 x 轴或 y 轴垂直
三力矩式
M A 0
MB 0
条件是:ABC三点不能共线
M C 0
上式有三个独立方程,只能求出三个未知数。
平面平行力系的平衡条件和平衡方程
如图:物体受平面平行力系F1 ,
y
F2 , …, Fn的作用。
如取 x 轴与各力垂直,不论力系是否
3.1.1平衡条件
从空间力系的简化结果可得到空间力系平衡 的必要和充分条件是力系的主矢和对任一点的主 矩为零,即:
'
FR 0
M0 0
3.1.2空间任意力系的平衡方程
Xi 0 ,Yi 0 , Zi 0
M x( Fi ) 0, M y( Fi ) 0, M z( Fi ) 0
空间力系平衡的必要与充分的解析条件是:力系 中各力在直角坐标系每一坐标轴上投影的代数和为零, 对每一坐标轴之矩的代数和为零。
解得:F 15.01kN Ax
FAy 5. 3 kN
F 17.33 kN
BC
A
D
B
E
3m
1m
2m
C
X 0,
FAx FBC cos30 0
FAy
M A(F ) 0,FBC AB sin30 P AD Q AE 0
A
M B (F ) 0,P DB Q EB FAy AB 0
距为4m。平衡荷重P3,到机中心
距离为6m。求:
P3
(1)保证起重机在满载
6m
和空载时都不致翻倒,平
衡荷重P3 为多少?
P1
P2
12m
(2)当平衡荷重P3 =180KN时,求满载时轨道A 、
空间力系的平衡方程式及其应用
即与各坐标轴相交。因此各力对坐标轴的矩均为零,即式(3-17)中,
M x (F ) 0 , M y (F ) 0, M z (F ) 0 。于是,空间汇交力系的平衡方程
只有三个,即
Fx 0
Fy
0
Fz
0
(3-18)
(2)空间平行力系
若取z轴平行于力系中各力的作用线,则 Oxy 坐标面与各力作用线
衡的必要与充分条件是:力系的主矢和力系对于任意点的主矩矢
都等于零。即
FR 0
MO 0
根据式(3-14)和式(3-16),上述条件可写成
空间任意力系平衡的必要与充分条 件是:力系中各力在任一直角坐标 系中每一轴上的投影的代数和等于 零,以及各力对每一轴的矩的代数 和也等于零。
Fx 0
Fy 0
式中,负号表明 FB ,FC 的实际方向与假设相反,即两杆均受压力。
例3-4
O1 和 O2 圆盘与水平轴 AB 固连,O1 盘垂直于z轴,O2 盘垂直于x轴,
力的矢量和。
即
FR F1 F2 Fn Fi (3-11)
图3-9
附加力偶系可合成为一个空间力偶,其力偶矩 MO,等于各附加力
偶矩的矢量和,亦即等于原力系中各力对于简化中心O的矩的矢量和。
MO MO (F1) MO (F2 ) MO (Fn ) MO (Fi )
F称R 为原力系的主矢,称为原力系对简化中心O的主矩矢 M。O
Fz 0
M
x
(F
)
0
M y (F ) 0
M
z
(F
)
0
(3-17)
空间任意力系是物体受力的最一般情况,其他类型的力系都可 以认为是空间任意力系的特殊情形,因而它们的平衡方程也可 由方程式(3-17)导出,具体如下。
空间力系平衡方程及应用
空间任意力系的平衡方程组由六个方程组 成,对于受空间任意力系作用而处于平衡的物 体,运用方程组最多求出六个未知量。
根据空间任意力系的平衡方程,可以推出 空间汇交力系和空间平行力系的平衡方程。
空间 力系 的平 衡方 程及 应用
1.空间汇交力系的平衡方程
由于空间汇交力系的简化结果只有一个合力R,因 此,力系平衡的平衡条件是力系的合力R为-9所示的悬臂刚架中,若已知荷载F1=20 kN,F2=100 kN,q=10 kN/m,尺寸H=3 m,h=1.5 m,l=3 m。不考虑刚架的自重,求刚架所受的约
束反力。
空间 力系 的平 衡方 程及 应用
空间 力系 的平 衡方 程及 应用
【解】 (1)以刚架为研究对象画受力图。 因A端为固定端,阻碍被约束构件向任意方向 移动和绕任意轴转动,故其约束反力为三个相互垂 直的分力和三个作用面相互垂直的分力偶,如图39所示,刚架所受力系为空间任意力系。 (2)建立坐标系,如图3-9所示,列平衡方 程。
(3-9)
空间汇交力系的平衡方程组由三个方程组成,利 用方程组最多只能求出三个未知量。
空间 力系 的平 衡方 程及 应用
2.空间平行力系的平衡方程
当空间平行力系中的各力的作用线与三维 直角坐标系的z轴平行时,无论力系是否平衡, 力系中各力在x,y轴上的投影都是零,且各力 对z轴的力矩也是零,因此,空间平行力系的 平衡方程组为
空间力 系的平衡方
程及应用
1.1 空间任意力系的平衡方程 1.2 空间力系平衡方程的应用
由空间任意力系的平衡条件,可以得到空间任 意力系的平衡的解析表达式为
(3-8)
式(3-8)说明空间任意力系平衡时,力系中 的各力在直角坐标系中的各轴上的投影代数和为零, 对各轴之矩的代数和也为零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m A (S 3 )
a
2 2 2 a S3 i a S3 j a S3 k 2 2 2
9
mA ( S6 ) a S6 i a S6 j
应用平衡方程计算:
Xi = 0 Yi = 0 Zi = 0 mx(Fi) = 0 my(Fi) = 0
2 S2 S5 0 2
5
例题4-5. 一不计重量的正方形薄板,由六根直杆支
持如图所示 .假设这六根杆都可以看作两力杆 ,求 在力P作用下各杆的内力.
B C
A
P
a
A' B'
D
C'
D'
a
6
解: (1)取薄板为研究对象画受力图并选取坐标.
B C
z
A y
P x a
A' S1 S2 B' S3
S6
C'
D
S5 S4
D'
a
7
写出各力的解析式及 力线上任一点的坐标.
2 M a S2 0 2
D'
2M S2 a
2 M a S5 0 2
mB'B(Fi) = 0
S5
2M a
18
B
C
mCD(Fi) = 0
2 a S1 a S2 0 2
M S1 a
a
A' A 2 S2 1 S1 B'
M
S5 D 3 S3 4
5
6 S6
C'
S4
(1)
P
2 S3 0 2
(2)
2 S2 S3 S5 0 S1 S4 S6 2
2 2 a 2 S3 S 4 2 S5 S 6 0
(3)
(4)
mz(Fi) = 0
2 a S3 S6 0 2 2 a S3 S5 0 2
S5
S4 D'
C'
a
A'
S1
S3 2 P
a
12
B
C
2)由于S1 、 S4 和 S6均为铅垂方向,力 矩轴应选铅垂方向. 3)力矩轴应选在过
a
A' S1 A
P
S2 B'
S6
D S3
S4 D' S5 C'
另三个力线的交点
B'或C´ . mB'B(Fi) = 0 mC'C(Fi) = 0
a
2 a P a S5 0 2
28
再
见
29
14
B
C
mB'C'(Fi) = 0
a S1 + a S4 = 0
A
P
S2
S6
D S3
B' D' S4 S5 C'
a
A'
S1
S4 = P
a
15
例题4-6. 边长为a 的正方形薄板由六根连杆支持如
图所示.不计板的重量,并把连杆看作二力杆. 求当板 上有一力偶M作用时各杆的内力.
B C
M
A 6
D
2 3 B' D'
my = 0 mz = 0
(4-27)
4
(c)对于空间平行力系 Zi = 0 , mx(Fi) = 0,my(Fi) = 0 则其平衡方程为: Zi = 0 mx(Fi) = 0
(4-28)
my(Fi) = 0 其他各种力系的平衡方程也可以从方程
(7-1)用同样的方法导出.
2 M a S5 0 2
a
S1
A' 1
D
B'
3 S3
2M S5 a
mA'D'(Fi) = 0
2 a P a S6 0 2
S6
2 P 2
22
mD'D(Fi) = 0
2 2 M a P a S2 0 2 2
A 2 S2
B
C
P
M
S5 4 6 5 S6 C' S4
D
S2 P
2M a
B'
3 S3
mC'D'(Fi) = 0
a
S1
A'
1
D' 2 2 a S1 a S2 a P0 2 2 M S1 mBC(Fi) = 0 a 2 2 M S4 P a S1 aS3 a S 4 0 2 a 2
23
4-6.物体的重心 (1)物体重心的定义:
PPj S1 S1 k
B
(-a,a,0) C
z
A (0,0,0) y S6 C'
P x
a
A' S1 S2 B' S3
D (0,a,0)
S5 S4 D'
S2
2 2 S2 i S2 k 2 2
S3
2 2 S3 j S3 k 2 2
a
S4 S4 k
2 2 S5 S5 i S5 k 2 2
o
5m
C2
B
A
C1 5m 20m
27
x
20 15 10 15 10 12.5 xc 7.5 20 15 15 10
20 15 7.5 15 10 10 yc 5 20 15 15 10
阅读材料和作业
• 阅读材料 – (1)P86---P101 • 作业 – 4-18;4-23 • 预习内容 – (1)P109---P123
B
C
P
A
2 B' 1
M
6 D 4
5 C'
3 A' D'
20
解: 取薄板为研究对象画受力图
B C
P
A 2 S2
M
S5 4 6 5 S6 C' S4 D'
D
B'
3 S3
a
S1
A'
1
21
Yi = 0
2 2 S3 P0 2 2
A 2 S2
B
C
P
M
S5 4 6 5 S6 C' S4 D'
S3 = - P mA'A(Fi) = 0
o
5m
C1 A
15m 5m
26
C2
20m
B
5 15 2.5 15 5 12.5 xc 7.5 5 15 15 5
5 15 7.5 15 5 2.5 yc 5 5 15 15 5
y
(2)负面积法
取坐标如图.使平面 图形组合成矩形A. C1(10,7.5) 以及负面积的矩形B. C2(12.5,10)
(5)
(6)
10
联立(1)(2)(3)(4)(5)(6)式得:
S1 = S6 = - P
S2 = S3 = S4= P S5 = - 2 P
2P
11
(2)取薄板为研究对象画受力图 1)只有力P和S3能
投影到轴AD上. FAD = 0
2 P S3 0 2
A B C
P
S2
S3 B'
S6 D
空间任意力系 的平衡
教案 2004.3.26
1
内容提要
空间任意力系
4-5.空间任意力系的平衡
4-6.物体的重心
2
4-5.空间任意力系的平衡
(1)空间任意力系平衡的必要和充分条件: R' = 0 , Mo = 0 (2)空间任意力系的平衡方程: Xi = 0 Yi = 0 Zi = 0
S6 S6 k
8
B
C
计算各力对A点的矩.
mA ( P) 0 m A ( S1 ) 0 mA (S2 ) 0 mA ( S 4 ) aS4 i
z
A y S5 S4 D' S6 C'
P
x
S2 S3
B'
D
a
A'
S1
2 2 mA ( S5 ) a S5 i a S5 k 2 2
4
5 C'
a
A'
1
16
解: 取薄板为研究对象画受力图.
B C
M
A
2 S2 D 3 B' 4 S5 6 S6 C' S4
5
S3
a
A'
1 S1
Hale Waihona Puke D'17B
C
Yi = 0
M
A 2 S2 D 3 B' S3 4 S5
S3 cos sin 0
S3 = 0
5
6 S6
C'
a
A'
1 S1
S4
mD'D(Fi) = 0
mAD(Fi) = 0
2 a S5 a S 6 0 2
D'
M S6 a
mAC(Fi) = 0
b S4 = 0
S4 = 0
19
例题4-7.边长为a的正方形薄板由六根连杆支持如图所
示.不计板的重量 ,并把连杆看作二力杆.求当板上有一力 P和一力偶M作用时各杆的内力.
选 讲
a
a P 2 a S2 0 2
S5 = - 2 P
S2 2P
13
B
C
mAD(Fi) = 0
a
2 2 2 a S3 i a S3 j a S3 k 2 2 2
9
mA ( S6 ) a S6 i a S6 j
应用平衡方程计算:
Xi = 0 Yi = 0 Zi = 0 mx(Fi) = 0 my(Fi) = 0
2 S2 S5 0 2
5
例题4-5. 一不计重量的正方形薄板,由六根直杆支
持如图所示 .假设这六根杆都可以看作两力杆 ,求 在力P作用下各杆的内力.
B C
A
P
a
A' B'
D
C'
D'
a
6
解: (1)取薄板为研究对象画受力图并选取坐标.
B C
z
A y
P x a
A' S1 S2 B' S3
S6
C'
D
S5 S4
D'
a
7
写出各力的解析式及 力线上任一点的坐标.
2 M a S2 0 2
D'
2M S2 a
2 M a S5 0 2
mB'B(Fi) = 0
S5
2M a
18
B
C
mCD(Fi) = 0
2 a S1 a S2 0 2
M S1 a
a
A' A 2 S2 1 S1 B'
M
S5 D 3 S3 4
5
6 S6
C'
S4
(1)
P
2 S3 0 2
(2)
2 S2 S3 S5 0 S1 S4 S6 2
2 2 a 2 S3 S 4 2 S5 S 6 0
(3)
(4)
mz(Fi) = 0
2 a S3 S6 0 2 2 a S3 S5 0 2
S5
S4 D'
C'
a
A'
S1
S3 2 P
a
12
B
C
2)由于S1 、 S4 和 S6均为铅垂方向,力 矩轴应选铅垂方向. 3)力矩轴应选在过
a
A' S1 A
P
S2 B'
S6
D S3
S4 D' S5 C'
另三个力线的交点
B'或C´ . mB'B(Fi) = 0 mC'C(Fi) = 0
a
2 a P a S5 0 2
28
再
见
29
14
B
C
mB'C'(Fi) = 0
a S1 + a S4 = 0
A
P
S2
S6
D S3
B' D' S4 S5 C'
a
A'
S1
S4 = P
a
15
例题4-6. 边长为a 的正方形薄板由六根连杆支持如
图所示.不计板的重量,并把连杆看作二力杆. 求当板 上有一力偶M作用时各杆的内力.
B C
M
A 6
D
2 3 B' D'
my = 0 mz = 0
(4-27)
4
(c)对于空间平行力系 Zi = 0 , mx(Fi) = 0,my(Fi) = 0 则其平衡方程为: Zi = 0 mx(Fi) = 0
(4-28)
my(Fi) = 0 其他各种力系的平衡方程也可以从方程
(7-1)用同样的方法导出.
2 M a S5 0 2
a
S1
A' 1
D
B'
3 S3
2M S5 a
mA'D'(Fi) = 0
2 a P a S6 0 2
S6
2 P 2
22
mD'D(Fi) = 0
2 2 M a P a S2 0 2 2
A 2 S2
B
C
P
M
S5 4 6 5 S6 C' S4
D
S2 P
2M a
B'
3 S3
mC'D'(Fi) = 0
a
S1
A'
1
D' 2 2 a S1 a S2 a P0 2 2 M S1 mBC(Fi) = 0 a 2 2 M S4 P a S1 aS3 a S 4 0 2 a 2
23
4-6.物体的重心 (1)物体重心的定义:
PPj S1 S1 k
B
(-a,a,0) C
z
A (0,0,0) y S6 C'
P x
a
A' S1 S2 B' S3
D (0,a,0)
S5 S4 D'
S2
2 2 S2 i S2 k 2 2
S3
2 2 S3 j S3 k 2 2
a
S4 S4 k
2 2 S5 S5 i S5 k 2 2
o
5m
C2
B
A
C1 5m 20m
27
x
20 15 10 15 10 12.5 xc 7.5 20 15 15 10
20 15 7.5 15 10 10 yc 5 20 15 15 10
阅读材料和作业
• 阅读材料 – (1)P86---P101 • 作业 – 4-18;4-23 • 预习内容 – (1)P109---P123
B
C
P
A
2 B' 1
M
6 D 4
5 C'
3 A' D'
20
解: 取薄板为研究对象画受力图
B C
P
A 2 S2
M
S5 4 6 5 S6 C' S4 D'
D
B'
3 S3
a
S1
A'
1
21
Yi = 0
2 2 S3 P0 2 2
A 2 S2
B
C
P
M
S5 4 6 5 S6 C' S4 D'
S3 = - P mA'A(Fi) = 0
o
5m
C1 A
15m 5m
26
C2
20m
B
5 15 2.5 15 5 12.5 xc 7.5 5 15 15 5
5 15 7.5 15 5 2.5 yc 5 5 15 15 5
y
(2)负面积法
取坐标如图.使平面 图形组合成矩形A. C1(10,7.5) 以及负面积的矩形B. C2(12.5,10)
(5)
(6)
10
联立(1)(2)(3)(4)(5)(6)式得:
S1 = S6 = - P
S2 = S3 = S4= P S5 = - 2 P
2P
11
(2)取薄板为研究对象画受力图 1)只有力P和S3能
投影到轴AD上. FAD = 0
2 P S3 0 2
A B C
P
S2
S3 B'
S6 D
空间任意力系 的平衡
教案 2004.3.26
1
内容提要
空间任意力系
4-5.空间任意力系的平衡
4-6.物体的重心
2
4-5.空间任意力系的平衡
(1)空间任意力系平衡的必要和充分条件: R' = 0 , Mo = 0 (2)空间任意力系的平衡方程: Xi = 0 Yi = 0 Zi = 0
S6 S6 k
8
B
C
计算各力对A点的矩.
mA ( P) 0 m A ( S1 ) 0 mA (S2 ) 0 mA ( S 4 ) aS4 i
z
A y S5 S4 D' S6 C'
P
x
S2 S3
B'
D
a
A'
S1
2 2 mA ( S5 ) a S5 i a S5 k 2 2
4
5 C'
a
A'
1
16
解: 取薄板为研究对象画受力图.
B C
M
A
2 S2 D 3 B' 4 S5 6 S6 C' S4
5
S3
a
A'
1 S1
Hale Waihona Puke D'17B
C
Yi = 0
M
A 2 S2 D 3 B' S3 4 S5
S3 cos sin 0
S3 = 0
5
6 S6
C'
a
A'
1 S1
S4
mD'D(Fi) = 0
mAD(Fi) = 0
2 a S5 a S 6 0 2
D'
M S6 a
mAC(Fi) = 0
b S4 = 0
S4 = 0
19
例题4-7.边长为a的正方形薄板由六根连杆支持如图所
示.不计板的重量 ,并把连杆看作二力杆.求当板上有一力 P和一力偶M作用时各杆的内力.
选 讲
a
a P 2 a S2 0 2
S5 = - 2 P
S2 2P
13
B
C
mAD(Fi) = 0