空间任意力系(精选)
合集下载
第五章 空间任意力系
z B x
F
C β
α
y
A x1
y1
第五章 空间任意力系
例题6-2
§5–2 力对轴的矩
解: 1.力对轴AB的矩。
M ′ AB (F ) = M B (F )
z B x
例题 5-2 F
C β
α
y
F′
= − F cos β cos α ⋅ BC
= −3.18 N ⋅ m
应用解析式求解力对点B的矩。
M x (F ) = yFx − zFy
第五章 空间任意力系
例题6-1
§5–2 力对轴的矩
例题 5-1
由图示可以求出力F 解: 在各坐标轴上的投影和力 F 作用点C 的坐标分别 为:
Fx = F cos αcos β
Fy = F cos α sin β
Fz = F sin α
x= a = 4 m y= b = 6 m z= c =-3 m
2 2 2
力F 对原点O之矩方向余弦
cos( MO , i ) = Mx = 0.845 MO
cos( MO , j ) =
cos( MO , k ) =
My MO
= −0.531
Mz = 0.064 MO
第五章 空间任意力系
§5–2 力对轴的矩
例题 5-2
例5-2 在轴AB的手柄BC的一端作用着力F,试求这力对轴 AB以及对点B和点A的矩。已知AB=20 cm,BC=18 cm,F=50 N ,且α=45°,β=60°。
第五章 空间任意力系
§5–2 力对轴的矩
由
例题 5-1
M x (F ) = yFx − zFy
My (F ) = zFx − xFz
F
C β
α
y
A x1
y1
第五章 空间任意力系
例题6-2
§5–2 力对轴的矩
解: 1.力对轴AB的矩。
M ′ AB (F ) = M B (F )
z B x
例题 5-2 F
C β
α
y
F′
= − F cos β cos α ⋅ BC
= −3.18 N ⋅ m
应用解析式求解力对点B的矩。
M x (F ) = yFx − zFy
第五章 空间任意力系
例题6-1
§5–2 力对轴的矩
例题 5-1
由图示可以求出力F 解: 在各坐标轴上的投影和力 F 作用点C 的坐标分别 为:
Fx = F cos αcos β
Fy = F cos α sin β
Fz = F sin α
x= a = 4 m y= b = 6 m z= c =-3 m
2 2 2
力F 对原点O之矩方向余弦
cos( MO , i ) = Mx = 0.845 MO
cos( MO , j ) =
cos( MO , k ) =
My MO
= −0.531
Mz = 0.064 MO
第五章 空间任意力系
§5–2 力对轴的矩
例题 5-2
例5-2 在轴AB的手柄BC的一端作用着力F,试求这力对轴 AB以及对点B和点A的矩。已知AB=20 cm,BC=18 cm,F=50 N ,且α=45°,β=60°。
第五章 空间任意力系
§5–2 力对轴的矩
由
例题 5-1
M x (F ) = yFx − zFy
My (F ) = zFx − xFz
讲空间任意力系资料
MO
FR
MO d FR MO (FR ) MO (F)
合力矩定理:合力对某点之矩等于各分力对同一点之矩的矢 量和.
合力对某轴之矩等于各分力对同一轴之矩的代数和. (2)合力偶
当 FR 0,MO 0 时,最后结果为一个合力偶。此时与简化 中心无关。
(3)力螺旋
当 FR 0, MO 0, FR ∥MO 时
M AB F 0 M AE F 0
F6
a
a 2
P
0
F6
P 2
F5 0
M AC F 0
F4 0
MEF F 0
F6
a
a 2
P
F1
ab 0 a2 b2
MFG F 0
Fb
b 2
P
F2b
0
MBC F 0
F2
b
b 2
P
F3
cos
45
b
0
F1 0 F2 1.5P
F3 2 2P
Fr 0.36F , R 50mm, r 30mm
各尺寸如图
求: (1) Fr , F(2)A、B处约束力 (3)O 处约束力
解:研究对象1:主轴及工件,受力图如图
Fx 0
Fy 0
F FBx FAx Fx 0 FBy Fy 0
Fz 0
F FBz FAz Fz 0
MOy —偏航力矩
MOz —俯仰力矩
飞机向前飞行
飞机上升 飞机侧移 飞机绕x轴滚转 飞机转弯 飞机仰头
2. 空间任意力系的简化结果分析(最后结果) 1) 合力
当 FR 0, MO 0最后结果为一个合力.
合力作用点过简化中心.
当
FR 0, MO 0, FR MO
空间任意力系的简化)汇总

z
3cm 5cm
B
D
o x
y
A
P
9
解: 根据力对轴的矩的定义计算
作和x轴垂直的平面M1.
找出交点O. z 确定力P在平面 M1内的分力 Pyz=1.732 kN. o 在平面M1内确定 力Pyz到矩心O的距 x 离即力臂d1=8cm
5cm
B
3cm
D
d1 A
M1
y
Pyz P
计算力Pyz对点A的矩亦即力P对x轴的矩
z
A'
O'
C'
MD FR'
B'
最后简化结果为左螺旋.
o
D
A B
C
y
x
30
力对轴的矩
z
图示门,求力 F 对z
(矩轴)的矩。 将力分解:
F
O
d
Fz
A
F Z∥ z 轴 F xy ⊥z 轴
于是:Mz(F) = M
O(Fxy)
F xy
=Fxyd =2OA’B’面积
3
结论:力对轴的矩等于该力在垂直于此轴的平面上的分力
对此轴与这个平面交点的矩。
说明: (1)力对轴的矩是代数量。 正负号规定:右手螺旋法则。 (2)若力与轴空间垂直,则 无须分解。 (3)若 F // z 轴
所组成的空间力偶系可合成为一个力偶 , 其力
偶矩矢Mo称为原力系对简化中心的主矩. Mo = Mi = mo(Fi)
20
结论: 空间任意力系向任一点简化, 一般可得到
一个力和一个力偶. 这个力作用在简化中心, 它的 矢量称为原力系的主矢,并等于这力系中各力的矢 量和; 这个力偶的力偶矩矢等于原力系中各力对简 化中心的矩的矢量和,并称为原力系对简化中心的 主矩. 主矢FR'只取决于原力系中各力的大小和方向, 与简化中心的位置无关 ;而主矩 Mo 的大小和方向 都与简化中心的位置有关.
3cm 5cm
B
D
o x
y
A
P
9
解: 根据力对轴的矩的定义计算
作和x轴垂直的平面M1.
找出交点O. z 确定力P在平面 M1内的分力 Pyz=1.732 kN. o 在平面M1内确定 力Pyz到矩心O的距 x 离即力臂d1=8cm
5cm
B
3cm
D
d1 A
M1
y
Pyz P
计算力Pyz对点A的矩亦即力P对x轴的矩
z
A'
O'
C'
MD FR'
B'
最后简化结果为左螺旋.
o
D
A B
C
y
x
30
力对轴的矩
z
图示门,求力 F 对z
(矩轴)的矩。 将力分解:
F
O
d
Fz
A
F Z∥ z 轴 F xy ⊥z 轴
于是:Mz(F) = M
O(Fxy)
F xy
=Fxyd =2OA’B’面积
3
结论:力对轴的矩等于该力在垂直于此轴的平面上的分力
对此轴与这个平面交点的矩。
说明: (1)力对轴的矩是代数量。 正负号规定:右手螺旋法则。 (2)若力与轴空间垂直,则 无须分解。 (3)若 F // z 轴
所组成的空间力偶系可合成为一个力偶 , 其力
偶矩矢Mo称为原力系对简化中心的主矩. Mo = Mi = mo(Fi)
20
结论: 空间任意力系向任一点简化, 一般可得到
一个力和一个力偶. 这个力作用在简化中心, 它的 矢量称为原力系的主矢,并等于这力系中各力的矢 量和; 这个力偶的力偶矩矢等于原力系中各力对简 化中心的矩的矢量和,并称为原力系对简化中心的 主矩. 主矢FR'只取决于原力系中各力的大小和方向, 与简化中心的位置无关 ;而主矩 Mo 的大小和方向 都与简化中心的位置有关.
5 理论力学--空间任意力系
z FAz Mz
FAy My
y
x
Mx A FAx
图5-8
因此,按照空间任意力系简化理论,将固定端处 的约束力向固定端点A处简化,得到一个力和一个力 偶。 这个力的大小和方向不能确定,所以用三个正交 的分力来表示;这个力偶的大小和方向也不能确定, 也用三个正交的分量表示。
5.3 空间任意力系的平衡方程
A
Fy 0
列平衡方程
F F4 cos 0 F2 cos a F a 0
F3
y
x
O x MO
F2
y
主矢 的大小和方向余弦分别为
FR ( Fx ) 2 ( Fy ) 2 ( Fz ) 2
图5-5
, cos(FR , k )
cos( FR , i )
F
FR
x
, cos(FR , j )
F
FR
y
F
FR
z
空间力偶系可合成为一个力偶
5.3.1 空间任意力系的平衡方程 空间任意力系平衡的必要与充分条件为:力系的 主矢和对任意一点的主矩均等于零。
M O M O (F ) 0 FR F 0
空间任意力系的平衡方程
F 0 F 0 其中包含有三个投影方程和三个 F 0 力矩方程,共计6个独立方程,可 M (F ) 0 解6个未知量。 M (F ) 0 M (F ) 0
O
M (F ) ,k M
z O
结 论
空间任意力系向任一点简化后,一般得到一个 力和一个力偶 。 这个力作用于简化中心,其力矢等于原力系的主矢。 这个力偶的力偶矩矢等于原力系对简化中心的主矩。 空间任意力系的主矢与简化中心的位置无关,而 主矩一般随简化中心位置的改变而改变,与简化中心 的位置有关。
FAy My
y
x
Mx A FAx
图5-8
因此,按照空间任意力系简化理论,将固定端处 的约束力向固定端点A处简化,得到一个力和一个力 偶。 这个力的大小和方向不能确定,所以用三个正交 的分力来表示;这个力偶的大小和方向也不能确定, 也用三个正交的分量表示。
5.3 空间任意力系的平衡方程
A
Fy 0
列平衡方程
F F4 cos 0 F2 cos a F a 0
F3
y
x
O x MO
F2
y
主矢 的大小和方向余弦分别为
FR ( Fx ) 2 ( Fy ) 2 ( Fz ) 2
图5-5
, cos(FR , k )
cos( FR , i )
F
FR
x
, cos(FR , j )
F
FR
y
F
FR
z
空间力偶系可合成为一个力偶
5.3.1 空间任意力系的平衡方程 空间任意力系平衡的必要与充分条件为:力系的 主矢和对任意一点的主矩均等于零。
M O M O (F ) 0 FR F 0
空间任意力系的平衡方程
F 0 F 0 其中包含有三个投影方程和三个 F 0 力矩方程,共计6个独立方程,可 M (F ) 0 解6个未知量。 M (F ) 0 M (F ) 0
O
M (F ) ,k M
z O
结 论
空间任意力系向任一点简化后,一般得到一个 力和一个力偶 。 这个力作用于简化中心,其力矢等于原力系的主矢。 这个力偶的力偶矩矢等于原力系对简化中心的主矩。 空间任意力系的主矢与简化中心的位置无关,而 主矩一般随简化中心位置的改变而改变,与简化中心 的位置有关。
空间任意力系

66 N m
Mz bF cos sin F cos cos 8 N m
MO
M x2
M
2 y
M
2 z
124.3 N m
32
第33页/共68页
例题
空间任意力系
例题2
力F 对原点O之矩方向余弦:
cos( MO , i)
Mx MO
0.845
cos( MO ,
j)
My MO
0.531
力。
48
第49页/共68页
例题
空间任意力系
例题7
z
FA
FB
O1
E
M
D
x
O2
G
FC
y
解:
1.取货车为研究对象,受力分析如
图。
2.列平衡方程。
O3
Fz 0, FA FB FC G 0
Mx 0, FC O3D G EM 0
3.联立求解。
M y 0, G O1E FC O1D FB O1O2 0
动画
第5章 空间任意力系
空间力系向任一点的简化
9
第10页/共68页
动画
第5章 空间任意力系
空间力系向任一点的简化意义
10
第11页/共68页
动画
第5章 空间任意力系
力线平移实例
11
第12页/共68页
动画
第5章 空间任意力系
力线平移实例
12
第13页/共68页
动画
第5章 空间任意力系
主矢F'R≠0 ,主矩 MO≠0 , 若 主 矢 F'R 垂 直 于 主矩MO ,则原空间任意力 系合成为一个力FR。
M y F zFx xFz
Mz bF cos sin F cos cos 8 N m
MO
M x2
M
2 y
M
2 z
124.3 N m
32
第33页/共68页
例题
空间任意力系
例题2
力F 对原点O之矩方向余弦:
cos( MO , i)
Mx MO
0.845
cos( MO ,
j)
My MO
0.531
力。
48
第49页/共68页
例题
空间任意力系
例题7
z
FA
FB
O1
E
M
D
x
O2
G
FC
y
解:
1.取货车为研究对象,受力分析如
图。
2.列平衡方程。
O3
Fz 0, FA FB FC G 0
Mx 0, FC O3D G EM 0
3.联立求解。
M y 0, G O1E FC O1D FB O1O2 0
动画
第5章 空间任意力系
空间力系向任一点的简化
9
第10页/共68页
动画
第5章 空间任意力系
空间力系向任一点的简化意义
10
第11页/共68页
动画
第5章 空间任意力系
力线平移实例
11
第12页/共68页
动画
第5章 空间任意力系
力线平移实例
12
第13页/共68页
动画
第5章 空间任意力系
主矢F'R≠0 ,主矩 MO≠0 , 若 主 矢 F'R 垂 直 于 主矩MO ,则原空间任意力 系合成为一个力FR。
M y F zFx xFz
空间任意力系
′ FR = 0, M O = 0
{
∑ X = 0, ∑ Y = 0, ∑ Z = 0 ∑ M ( F ) = 0, ∑ M ( F ) = 0, ∑ M ( F ) = 0
x y z
对于空间平行力系,
z
∑Z =0 ∑ M (F ) = 0 ∑ M (F ) = 0
x y
O
y
x
6.5.3 重心 刚体在地表面无论如何放置,其平行分布重力的 合力的作用线都过此物体上一个确定的点,该点称为 物体的重心。 均质物体的重心位置只取决于其体积和形状,与 物体的几何中心重合,也称为形心,形心坐标的计 算公式为,
FCy
FCx
− FAy • 5 + FAx • 5 = 0
C
FAy
5
FAx
FAx = 0
A
5
∑ X = 0, ∑ Y = 0,
FCx + F1 + FAx = 0
FAy + FCy = 0
FCx = −50kN
FCy = 0
对整体:∑ X = 0,
− FBx + F1 = 0
FBx = 50kN
4-16(b):求A、B、C约束反力。
i =1 i =1 i =1
n
n
n
合力矩定理:
若空间任意力系可以合成为一个合力,则其 合力对于任一点(或轴)之矩等于力系中各力对 于同一点(或轴)之矩的矢量和(或代数和)。 表示为,
M O ( FR ) = ∑ M O ( Fi )
n
M e ( FR ) = ∑ M e ( Fi )
i =1
i =1 n
(2) 负面积法 将图形补足成一 规则的矩形,则:
第5章 空间任意力系
例5-8 已知:Fx 4.25N,Fy 6.8N, Fz 17N, Fr 0.36 F , R 50mm , r 30mm 各尺寸如图
求: (1) Fr , F (2)A、B处约束力(3)O 处约束力
解:研究对象1:主轴及工件,受力图如图
F F F
x y
0 0 0
物体的重心(形心)与静矩 1. 计算重心坐标的公式 对y轴用合力矩定理
有 对x轴用合力矩定理
有
再对x轴用合力矩定理
则计算重心坐标的公式为 (4–14) 对均质物体,均质板状物体,有
称为重心或形心公式
2. 确定重心的悬挂法与称重法 (1) 悬挂法
图a中左右两部分的重量是否一定相等?
(2) 称重法
例5-2,有点问题? 已知: 物重P=10kN,CE=EB=DE; 30 求:杆受力及绳拉力
0
,
解:画受力图如图, 列平衡方程
F F F
x
0
F1 sin 45 F2 sin 45 0
y
0 0
FA sin 30 F1 cos 45 cos 30 F2 cos 45 cos 30 0 F1 cos 45 sin 30 F2 cos 45 sin 30 FA cos 30 P 0 结果: F1 F2 3.54kN FA 8.66kN
求:力
对 x, y, z轴的矩
=0
=
= =
+0
-
= =
则
+ 0
即,力对点的矩矢在过该点的某轴上的投影,等于 力对该轴的矩。
§5–2 空间任意力系的平衡条件
空间任意力系平衡的充分必要条件:该力系的主矢、 主矩分别为零。 1.空间任意力系的平衡方程
理论力学空间任意力系
(M
zi
)2
cos(M , i) M x cos(M , j) M y cos(M , k) M z
M
M
M
平衡条件
空间力偶系平衡的充分必要条件是 :
M 0合力偶矩矢等于零
M ( M xi )2 ( M yi )2 (M zi )2
平衡方程
M ix M iy
0 0
M iz
M 2 M 2 sin
j M 2 cos
k
3 5
F
20.2
j
4 5
F
20.2k
合力偶矩矢 M M1 M 2 60i 12 j 16k
大小: M 602 122 162 63.25(N m)
(1)研究多个力偶的合成或力偶系的平衡,只要用力偶矩矢 进行运算即可;
(2)求合力偶矩矢时,一般只需求得其沿各坐标轴的分量即可。 也可进一步分析合力偶矩矢的大小及其方位角。
力与轴平行或与轴相交——即力与轴在同一平面内 时,力对该轴的矩为零。
Mz (F ) MO (Fxy) Fxy d M z (F) Mo (Fxy ) Fxy h
力对轴之矩等于力在该轴垂直面上的投影对该轴和 投影面的交点之矩
3、力对点之矩与力对过该点的轴之矩的关系
r
r
rrr
已知:力 F及r 力 F在三根坐标轴上的分力 ,Fx ,Fy, Fz
四、空间任意力系
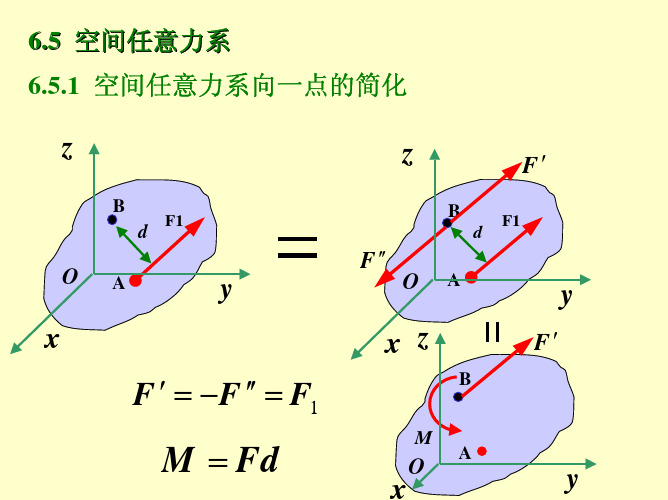
1、空间任意力系向一点的简化
F1 F1 , F2 F2 , , Fn Fn M1 MO (F1), M2 MO (F2 ), , Mn MO (Fn )
n
FR F1 F2 F3 F1 F2 F3 Fi i 1 n
M O M1 M 2 M 3 M O F1 M O F2 M O F3 M O Fi
空间任意力系
,其上作用有铅直载荷F。钢丝OA和OB所构成的平面垂直于铅直平面Oyz, 并与该平面相交于OD,而钢丝OC则沿水平轴y。已知OD与轴z间的夹角为β
,又∠AOD = ∠BOD = α,试求各钢丝中的拉力。
第4章
空间力系
例题 5-3
§4-1 空间汇交力系合成的解析法及其平衡的解析条件
例题 4-3
解:取O点为研究对象,受力分 析如图所示,这些力构成了空间
比较可得
MO F x M x F MO F y M y F MO F z M z F
力对坐标原点的矩在各坐标轴上的投影,等于该力对相
应坐标轴的矩。
第4章 空间力系
§4–2 力对轴的矩
坐标轴的矩。 几何证明
力矩关系定理
力对坐标原点的矩在各坐标轴上的投影,等于该力对相应
方向余弦
cos( M O , i ) yFz zFy MO ,
zF xFz cos( M O , j ) x , MO
cos( M O , k )
xFy yFx MO
第4章
空间力系
§4–2 力对轴的矩
思考题
思考题
受力情况如图所示,求(1)F1力对 x,y,z 轴的矩,(2) F2力 对 z′轴的矩。
力对坐标轴的矩的解析表达式
M x F yFz zFy ,
M y F zFx xFz ,
M z F xFy yFx
力对原点的矩的解析表达式
M O ( F ) yFz zFy i zFx xFz j xFy yFx k
A
x
x
F Fx2 Fy2 Fz2 4.52 6.32 182
,又∠AOD = ∠BOD = α,试求各钢丝中的拉力。
第4章
空间力系
例题 5-3
§4-1 空间汇交力系合成的解析法及其平衡的解析条件
例题 4-3
解:取O点为研究对象,受力分 析如图所示,这些力构成了空间
比较可得
MO F x M x F MO F y M y F MO F z M z F
力对坐标原点的矩在各坐标轴上的投影,等于该力对相
应坐标轴的矩。
第4章 空间力系
§4–2 力对轴的矩
坐标轴的矩。 几何证明
力矩关系定理
力对坐标原点的矩在各坐标轴上的投影,等于该力对相应
方向余弦
cos( M O , i ) yFz zFy MO ,
zF xFz cos( M O , j ) x , MO
cos( M O , k )
xFy yFx MO
第4章
空间力系
§4–2 力对轴的矩
思考题
思考题
受力情况如图所示,求(1)F1力对 x,y,z 轴的矩,(2) F2力 对 z′轴的矩。
力对坐标轴的矩的解析表达式
M x F yFz zFy ,
M y F zFx xFz ,
M z F xFy yFx
力对原点的矩的解析表达式
M O ( F ) yFz zFy i zFx xFz j xFy yFx k
A
x
x
F Fx2 Fy2 Fz2 4.52 6.32 182
空间任意力系
B
Fx
mz ( F ) mz ( Fx ) Fx a 25 2 50N .m
x
Fy a 2m
y
11
[练习1] 已知P=2000N, C点在Oxy平面内,求力P对三个 坐标轴的矩。
解:
Pz P sin 45 1000 2N
Pxy P cos45 1000 2 N Px Pxy sin 60 500 6 N Py Pxy cos60 500 2 N
mO ( F ) ( m x ( F )) 2 ( m y ( F )) 2 ( m z ( F )) 2
my (F ) mx ( F ) mz ( F ) cos ,cos ,cos mO ( F ) mO ( F ) mO ( F )
17
§5-3 空间汇交力系的合成与平衡
"
29
⑵ R '∥ M o ; 这种情况力与力偶不能再合成,这就是 力系简化的最终结果,称为力螺旋。如钻孔、攻丝、拧木
螺钉等。
力螺旋中力的作用线称为原力系的中心轴,中心轴过简 化中心。
O·
Mo R'
=
R' · O
O·
R'
Mo
=
· O
R'
右螺旋
左螺旋
力螺旋与力、力偶一样,都是组成力系的基本元素。
30
z
mo ( F )
F
B
r
A
x
O
b y
a Fxy
力对点的矩矢在过该点的任一轴上的投影等于力对该 轴的矩。
[mo (F )]z mz (F )
16
利用力对点之矩与对通过该点的轴之矩的关系计算力