影响履带转向阻力系数的因素分析
履带车辆坡道转向特性研究

=
3 转 向阻力矩 . 4
转 向阻力矩等于横 向阻力梯形 图中梯形面积对 C点取矩 , ( 计算过程如下 : 6 )
:
q1 p 一 一 — __ 一
【 (1 ) 一) —) ( A] LA+ (
外侧 ‰
=
( 一 半 )sih ~in GO n ̄ 舭 s (hO ̄ — ~ ( 1 c 厂si 7 +t o\ in —a l GO 6 ns n ̄ _一 s )
一
[ ‰q ( ) —) (.) Il A 争 + 2L (一) —) 争A】l A _ + 1L _ (一) —) 争A]I A + 1L
:
q2 p-
式 中: 履带接地长 ;—履带中心距 , 卜 曰 下标为… ’ 1表示内侧履带 的参数 , 下标为… 表示外侧履带参数 , 2’ 下同。
[ ( ( A]I+) 叫: 丁 A+ j j L + 1
[ f ) +) ( ) ( A] 争 + 争 }
[ (+) +) A] I A+ - lL
t = a
bCOSf f
() 1
( 型
, 析了接地面瞬时转向中心偏移量和转向所需 的制动力和牵引力 31压 力 中心 偏移量 当履带车辆在坡道上转 向时 , 向力和纵 向力的作用下 , 在横 的变化规律及影响因素 , 分析了转向的不稳定 因素 。
压力中心横向偏移量 :
Y =h tn =g ns  ̄ o g af ht Oio l a n
A 一 面L
() 5
g
(3 1)
59 。 2 0 0和 7 。 3 0时 , ” 号 ; 6。 取 +
32 法向负荷梯 形图 .
单元十三履带式拖拉机转向理论

从上式可以知 , 快速履带的驱动力 Fk2恒为正值, 1则可能在某种条件下为 而慢速履带的驱动力 FK 负值。 负的驱动力是依靠制动 慢速履带获得的 。
M Fk2 0.5 Fk B F 0 .5 F M k1 k B
单元十三 履带式拖拉机转向理论
Fkp Fkp
u L Fkp G 2 B
L 1 .2 1 .5 B
B f B 2 sin aT
u L 2 B f0 B 1 B 2 sin aT
单元十三 履带式拖拉机转向理论
课题四 履带式拖拉机的转向能力 二、底盘结构与挂钩牵引力对转向能力的影响
T r vr
r
z T
单元十三 履带式拖拉机转向理论
课题二履带拖拉机的转向动力学
(一)空载时的转向阻力
履带支承面上单位长度 的 G 垂直载荷为q 2L 微段dx上的
G 垂直载荷为:dG dx 2L
单元十三 履带式拖拉机转向理论
课题二履带拖拉机的转向动力学
(一)空载时的转向阻力
M 令 BFK
Fk2 Fk (0.5 ) F k 1 Fk (0.5 )
单元十三 履带式拖拉机转向理论
课题二履带拖拉机的转向动力学
(二)履带式车辆带牵引机具转向时的阻力矩
当 0时, Fk1 Fk2 , 拖拉机为直线行驶 . 当 0.5时, Fk2 Fk1 0, 两侧履带驱动力
v R z
R 0 .5 B v1 v R R 0 .5 B v2 v R
单元十三 履带式拖拉机转向理论
x z R x v v
课题一
履带车辆的转向理论

一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
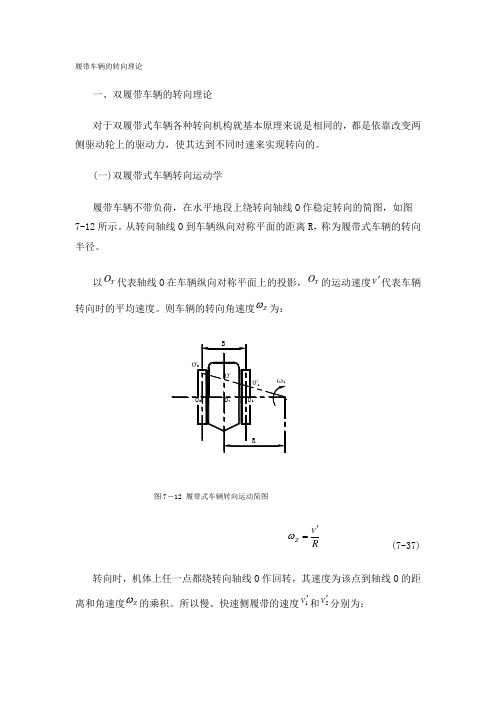
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O作稳定转向的简图,如图7-12所示。
从转向轴线O到车辆纵向对称平面的距离R,称为履带式车辆的转向半径。
以代表轴线O在车辆纵向对称平面上的投影,的运动速度代表车辆转向时的平均速度。
则车辆的转向角速度为:图7-12 履带式车辆转向运动简图(7-37)转向时,机体上任一点都绕转向轴线O作回转,其速度为该点到轴线O的距离和角速度的乘积。
所以慢、快速侧履带的速度和分别为:(7-38)式中:B—履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:(二)双履带式车辆转向动力学1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1)在相同地面条件下,转向行驶阻力等于直线行驶阻力,且两侧履带行驶阻力相等,即:(2)在相同的地面条件和负荷情况下,相当于直线行驶的有效牵引力,即:图7-13 转向时作用在履带车辆上的外力所以回转行驶的牵引平衡关系为:(7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为,在负荷作用下总的转向阻力矩为:(7-40)式中:—牵引点到轴线的水平距离。
如前所述履带车辆转向是靠内、外侧履带产生的驱动力不等来实现的,所以回转行驶时的转向力矩为:(7-41)稳定转向时的力矩平衡关系为:(7-42)为了进一步研究回转行驶特性,有必要对内、外侧驱动力分别加以讨论。
由上可得:(7-43)式中:为在作用下,土壤对履带行驶所增加的反力,亦即转向力,作用方向与驱动力方向相同,以表示。
变形得式:(7-44)令所以。
履带车辆三种转向方式特性的对比分析

陈泽宇, 张承宁, 李军求, 武小花
( 北京理工大学机械与车辆工程学院, 北京 100081 )
摘 要: 对中心差速、内侧降速和外侧升速3 种履带车辆转向方式进行运动学和动力学分析; 对3 种方式下的转
向半径的变化规律进行了研究; 对比了3 种转向方式的内外侧履带功率需求; 在Ma tlab / Simu link 中进行了仿真。
1) 通过对履带车辆转向运动学的分析与仿真研
究, 得到如下结论: 3 种情况的转向半径变化率相同,
但转向半径的数值不同; 转向角速度相同时, 内侧降
速式的转向半径最小, 中心差速式稍大, 外侧升速式
最大。
2) 功率需求分析表明, 转向角速度相同时, 内侧
降速式转向的功率需求是最小的, 中心差速式较大,
ML
B
+ (
Iz
B
- DmB
4
)X# ] @u0
( 9)
式中: 功率P 的第1个下标1, 2, 3分别对应内侧
降速式、中心差速式和外侧升速式3种转向方式; 第2
# 44#
2010年4 月 农机化研究 第4期
个下标1, 2 分别表示内侧履带和外侧履带。通过式
程为
F 2 - F 1 - 2FR = Dmu#
(F2 + F 1 ) B
2 - ML = IzX#
ML = LGL
4
L =
Lmax
0. 925 + 0. 15R /B
R = u /X
P 1 =
F 1u1
1 000
P 2 =
履带车辆的转向理论
履带车辆的转向理论一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7-12所示。
从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径。
以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。
则车辆的转向角速度Z ω为:图7-12 履带式车辆转向运动简图R v Z '=ω (7-37)转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z ω的乘积。
所以慢、快速侧履带的速度1v '和2v '分别为:Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(21+'=+='-'=-=' (7-38)式中:B —履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:B R B R v v 5.05.021+-=''(二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即:ff f F F F 5.021='='(2)在相同的地面条件和负荷情况下,γcos x F 相当于直 线行驶的有效牵引力KP F ,即:图7-13 转向时作用在履带车辆上的外力γcos x KP F F =所以回转行驶的牵引平衡关系为:K KP f K Kx f f K KF F F F F F F F F F =+='+'+'+'='+'212121cos γ (7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为μM ,在负荷xF 作用下总的转向阻力矩为:γμsin x T C F a M M += (7-40)式中:T a —牵引点到轴线21O O 的水平距离。
履带阻力系数
履带阻力系数履带阻力系数是描述履带与地面之间相互作用的一个重要参数。
它反映了履带在地面上的摩擦力和阻力,对于履带式车辆的设计、性能评估和优化具有重要意义。
一、履带阻力系数的定义履带阻力系数是衡量履带与地面之间摩擦力和阻力的一个指标。
它通常用符号表示,例如k或μ,其中k是常数,μ是摩擦系数。
履带阻力系数的大小取决于多个因素,包括地面的粗糙度、湿度、温度等。
二、履带阻力系数的影响因素1.地面粗糙度:地面的粗糙度对履带阻力系数有很大影响。
粗糙度越高,履带与地面之间的摩擦力和阻力就越大,因此履带阻力系数也越大。
2.地面湿度:湿地面上的履带阻力系数通常比干地面上的大。
因为湿地面上的水分可以增加履带与地面之间的摩擦力,从而增加阻力。
3.地面温度:温度的变化也会影响履带阻力系数。
在低温条件下,地面可能变得硬和滑,导致履带阻力系数增加。
而在高温条件下,地面可能变得软和粘,导致履带阻力系数减小。
三、履带阻力系数的测量方法测量履带阻力系数的方法有多种,包括静态测量和动态测量。
静态测量是在静止状态下测量履带的摩擦力和阻力,而动态测量是在运动状态下测量履带的摩擦力和阻力。
常用的测量方法包括摩擦试验机、牵引力试验机和模拟试验等。
四、履带阻力系数在工程中的应用1.车辆设计:在车辆设计中,需要考虑履带的尺寸、材料和结构等因素对履带阻力系数的影响。
通过优化设计,可以降低车辆的能耗和提高其行驶性能。
2.性能评估:在车辆性能评估中,需要测量履带的摩擦力和阻力以确定其性能。
通过比较不同车辆的履带阻力系数,可以评估其性能优劣。
3.优化设计:通过测量和分析履带阻力系数,可以对车辆进行优化设计,以降低能耗和提高行驶性能。
例如,可以通过改变履带的材料、结构或尺寸来降低摩擦力和阻力。
总之,履带阻力系数是描述履带与地面之间相互作用的一个重要参数。
它对于车辆的设计、性能评估和优化具有重要意义。
在工程应用中,需要充分考虑各种因素对履带阻力系数的影响,以确保车辆的性能和安全性。
煤矿井下履带车辆转向阻力矩的计算

Tracked Vehicle in Coal Mine Underground
L I Chun2ying1 , WANG Bin2
(11 Col le ge of Mechanical En gi neeri n g of TU T , T ai y uan 030024 , Chi na; 21 T ai y uan B ranch , Chi na Coal Research I nstit ute , T ai y uan 030006 , Chi na)
3 收稿日期 :2006210216 作者简介 :李春英 (1959 - ) ,女 ,山西太原人 ,高级工程师 ,主要从事煤矿采 、掘 、车辆机械机构的力学研究 , ( Tel) 0351 - 6014147
第 4 期 李春英等 :煤矿井下履带车辆转向阻力矩的计算
v′1 —内侧履带的行走速度 ; v′2 —外侧履带的行走速度 ; 在中心 O T 的行走速度 ; B —两履带的间距 ; O1 , O2 —两个履带的中心 ;
R —转弯半径 ;ωT —转向角速度 图 1 履带式机械转向运动简图
1 内摩擦阻力矩 M1
履带车辆转向时内摩擦阻力矩是指履带内部消 耗的阻力矩 ,它包括 :
337
图 2 转向时履带的受力状态图
这些阻力矩的计算如下 。
1. 1 履带运行参数的确定 通过实验得出 :
履带最大牵引力 F1max
=
W 2
,
额定牵引力 F1 = 01 7 F1max ,
履带张紧力 Fz = 01 5 F1 .
式中 :W 为履带上的机器总重量 , kN 。
11 2 履带和驱动轮啮合阻力
2. 3 转向阻力
Fw3
履带车辆液压机械差速转向系统参数优化的研究

2018年第1期【摘要】履带车辆液压机械差速转向系统的参数设计问题具有着多参数和多目标的特点。
从履带车辆转向的系统的动力性、灵活性和快速性入手,对转向系统的参数模型进行优化,可以对系统参数之间的相互约束问题和相互耦合问题进行有效解决。
本文主要从这一系统的优化参数的内容入手,对系统参数优化问题进行了探究。
【关键词】履带车辆;液压机械差速转向系统;参数优化前言:履带式工程机械、履带式军用装甲车辆和履带式拖拉机是履带车辆的代表。
液压机械差速转向系统是建立在液压传动技术、机械传动技术等技术基础上的履带车辆流转向系统。
这一技术的应用,可以让履带车辆表现出作业效率高、操作轻便的特点。
转向系统的优化参数与履带车辆的转向动力性和灵活性等因素之间存在着密切的联系。
任意一种参数的改变,都会对其他参数带来不利的影响。
遗传算法的应用,可以为转向系统的参数优化提供一定的帮助。
一、液压机械差速转向系统的优化参数结构简单性和工作高效性是液压机械差速专项装置所具有的主要特点。
这一系统的优化参数建立在系统的工作原理之上[1]。
在对这一系统的工作原理进行分析以后,我们可以发现,在液压差速转向系统的液压泵排量可调的情况下,驾驶员可以通过对液压闭式回路系统的系统排量比进行调整的方式完成转向。
因而系统的优化参数主要涉及到了以下几方面的内容:一是该系统的直驶变速系统参数;二是系统的中央传动比、行星排特性参数和液压闭式回路系统的参数;三是系统的马达后传动比、直驶变速系统参数等因素。
一般而言,直驶变动系统的参数与车辆的直驶性能之间存在着一定的联系。
在履带车辆机械差速转向系统的设计过程中,直驶变速系统参数和中央传动比通常会被看作为已知参数。
液压闭式回路系统参数和马达后传动比等参数就成为了需要优化的系统参数。
二、液压机械参数转向系统参数优化的影响因素(一)地面特性在转向行驶过程中,发动机的液压闭式回路系统的履带牵引力要大于地面所提供的牵引力,因而不论是发动机的动力因数还是液压闭式回路系统的系统动力因数,都需要高于地面动力因数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
影响履带转向阻力系数的因素分析
摘要:履带转向阻力系数大小的选取,对履带整机结构的设计有很大的影响,目前人们只考虑了转弯半径对履带转向阻力系数的影响,而往往忽略了履带沉陷量、履带中心距与其接地长度对其的影响。
本文逐一对影响履带转向阻力系数的因素进行分析。
关键词:转向阻力系数;行驶阻力系数;履带沉陷量;转弯半径
引言
履带与地面之间的水平作用,是一个非常复杂的物理现象,与其直接相关的因素很多,如履带的整体结构形式,履带板的结构参数,地面土壤的物理—力学性能,履带对地面的沉陷量等。
其中,履带与地面之间的转向阻力系数大小的选定对履带结构设计和强度设计有很大的决定作用,本文将对影响转向阻力系数大小的因素逐一进行分析。
1.影响履带转向阻力系数因素的理论分析
影响转向阻力系数的因素很多,下面假定车辆沿顺时针方向转弯,为车辆几何中心,为履带理论转向中心,分别为横向和纵向偏心距离,其中,,L 为履带接地长度,为履带中心距,为履带车辆理论转弯半径。
苏联尼基金教授提出的经验公式【1】:
2.各参数对履带转向阻力系数的影响分析
2.1履带转向阻力系数和转弯半径关系
由图1曲线可知,当转弯半径很小时,履带转向阻力系数很大;当履带转弯半径时,履带转向阻力系数大约为0.6;当转弯半径足够大时,履带车辆近似于直行,此时履带转向阻力系数趋近于行驶阻力系数。
图1 履带转向阻力系数和转弯半径之间的关系曲线
2.2履带转向阻力系数和履带沉陷量关系
由图2曲线可知,在转弯半径一定的条件下,随着履带沉陷量的增大,转向阻力系数亦增加。
由于随着履带沉陷量的增加,履带式机器所受的总的土壤水平变形阻力增加,但行驶阻力系数为履带所受的土壤水平变形阻力与机器重力与垂直外载荷的合力的比值相关。
图2 履带转向阻力系数和履带沉陷量关系曲线
2.3履带转向阻力系数和履带接地长度、履带中心距关系
由图3曲线可知,在一定的范围内,随履带接地长度的增加,履带转向阻力系数随之减小;而随着履带中心距的增加,履带转向阻力系数随之增加。
但履带接地长度和履带中心距不能孤立来看对履带转向阻力系数的影响,因为只有在范围内才是合适的,如果时,履带行走装置不稳定,如果时,履带车辆无法转弯[2]。
图3 履带转向阻力系数和履带接地长度、履带中心距之间的关系曲线
3.结论
通过上述计算和分析,总结出影响履带转向阻力系数大小的因素分析:
3.1对履带转弯阻力系数影响最大的是履带的转弯半径,当转弯半径很小时,转向阻力系数很大;当转弯半径趋于无穷大时,转向阻力系数等同于行驶阻力系数,相当于履带是直行。
3.2在一定的范围内,随履带接地长度的增加,履带转向阻力系数随之减小;而随着履带中心距的增加,履带转向阻力系数随之增加。
3.3履带的沉陷量对履带的转向阻力系数影响很大,并且提高了履带式机器所受的总的土壤水平变形阻力。
参考文献:
[1]吴运耕.试谈双履带行走装置的转弯理论和功率计算[J].工程机械,1987,1:19
[2]刘景鹏.排土(岩)机履带行走装置主要参数选定[J].机械研究与应用,2005,6:83-84.。