自动化机构设计-习卫娜
基于ROS架构的叉车型AGV控制系统设计开发研究

基于ROS架构的叉车型AGV控制系统设计开发研究
刘光印;钱东海;肖子鸣;王志国
【期刊名称】《自动化与仪表》
【年(卷),期】2024(39)5
【摘要】针对叉车型AGV开发成本高、系统封闭、可拓展性差的问题,该文基于开源机器人操作系统(ROS),设计了一套新的控制系统。
该控制系统采用双层控制架构,通过模块化的设计思想实现了控制平台的搭建。
其中,上层控制器采用装有Linux操作系统和ROS的嵌入式工控机实现叉车型AGV的即时定位与建图(SLAM)及路径跟踪功能;下层控制器采用西门子PLC实现对I/O信号的采集,以及通过CAN网络实现对舵轮的行走与转向控制及信息采集、对电源系统实现监控、对货叉起升高度检测,同时可以与车间调度计算机通过无线网络进行AGV调度与在线监控。
【总页数】6页(P34-39)
【作者】刘光印;钱东海;肖子鸣;王志国
【作者单位】上海大学机电工程与自动化学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种基于Ros的AGV调度系统设计与实现
2.基于ROS的可重构多差速驱动重载AGV系统架构设计及实现
3.ROS框架下模块化AGV控制系统设计
4.基于ROS 和激光雷达的AGV导航系统设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
宁波迅安自动化设备有限公司介绍企业发展分析报告

Enterprise Development专业品质权威Analysis Report企业发展分析报告宁波迅安自动化设备有限公司免责声明:本报告通过对该企业公开数据进行分析生成,并不完全代表我方对该企业的意见,如有错误请及时联系;本报告出于对企业发展研究目的产生,仅供参考,在任何情况下,使用本报告所引起的一切后果,我方不承担任何责任:本报告不得用于一切商业用途,如需引用或合作,请与我方联系:宁波迅安自动化设备有限公司1企业发展分析结果1.1 企业发展指数得分企业发展指数得分宁波迅安自动化设备有限公司综合得分说明:企业发展指数根据企业规模、企业创新、企业风险、企业活力四个维度对企业发展情况进行评价。
该企业的综合评价得分需要您得到该公司授权后,我们将协助您分析给出。
1.2 企业画像类别内容行业空资质增值税一般纳税人产品服务备和环保设备的研发、制造、加工、维护及批发1.3 发展历程2工商2.1工商信息2.2工商变更2.3股东结构2.4主要人员2.5分支机构2.6对外投资2.7企业年报2.8股权出质2.9动产抵押2.10司法协助2.11清算2.12注销3投融资3.1融资历史3.2投资事件3.3核心团队3.4企业业务4企业信用4.1企业信用4.2行政许可-工商局4.3行政处罚-信用中国4.4行政处罚-工商局4.5税务评级4.7经营异常4.8经营异常-工商局4.9采购不良行为4.10产品抽查4.11产品抽查-工商局4.12欠税公告4.14被执行人5司法文书5.1法律诉讼(当事人)5.2法律诉讼(相关人)5.3开庭公告5.4被执行人5.5法院公告5.6破产暂无破产数据6企业资质6.1资质许可6.2人员资质6.3产品许可6.4特殊许可7知识产权7.1商标信息最多显示100条记录,如需更多信息请到企业大数据平台查询7.2专利7.3软件著作权7.4作品著作权7.5网站备案7.6应用APP7.7微信公众号8招标中标8.1政府招标8.2政府中标8.3央企招标8.4央企中标9标准9.1国家标准9.2行业标准9.3团体标准9.4地方标准10成果奖励10.1国家奖励10.2省部奖励10.3社会奖励10.4科技成果11土地11.1大块土地出让11.2出让公告11.3土地抵押11.4地块公示11.5大企业购地11.6土地出租11.7土地结果11.8土地转让12基金12.1国家自然基金12.2国家自然基金成果12.3国家社科基金13招聘13.1招聘信息感谢阅读:感谢您耐心地阅读这份企业调查分析报告。
电气自动化控制设备可靠性相关问题_1

电气自动化控制设备可靠性相关问题发布时间:2021-09-06T15:46:19.467Z 来源:《科学与技术》2021年第29卷4月第12期作者: 1鲍莎日娜 2 高飞[导读] 电气自动化技术直接影响企业的发展,相关技术人员的可靠性设计,为电气控制设备开发公司自动化技术的提高提供了良好的基础 1鲍莎日娜 2 高飞1内蒙古自治区民航机场集团有限责任公司呼和浩特分公司内蒙古呼和浩特 0100702 内蒙古京泰发电有限责任公司内蒙古鄂尔多斯 017100摘要:电气自动化技术直接影响企业的发展,相关技术人员的可靠性设计,为电气控制设备开发公司自动化技术的提高提供了良好的基础。
从某种意义上说,经济的发展,极大地促进了电气自动化的发展,在日常生活领域,其广泛应用于各行各业。
通过分析电力自动化设备可靠性的主要因素,对提高设备的可靠性提供了理论依据。
关键词:电气自动化;设备;可靠性;问题分析一、提升电子自动化控制设备可靠性的重要性1.1增强企业竞争力随着经济发展,自动化技术在电气企业中的应用越来越广泛,提高电气自动化控制设备可靠性是提升企业产品质量,增强企业核心竞争力的重要途径。
现阶段电气行业发展迅速,行业内竞争逐渐激烈,电气自动化能够对生产环节的各方面实行有效的控制,在很大程度上提高生产的质量和进度,减少瑕疵品,节省原料与资金,有利于企业内部资源优化以及对用户的服务质量,从长远角度建立企业的战略目标,促使企业在激烈的行业竞争中保持有利的地位,实现长期稳定的发展。
1.2降低成本投入电力企业的生产环节是一个涉及内容多、环节复杂的高度集中的环节,需要消耗企业大量的人力物力资源,需投入的生产成本较大,提高控制设备可靠性能够有效降低企业成本,提升经济效益,主要体现在以下几个方面:首先,自动化控制设备的应用有效减少了人工操作,将机械设备和操作设施有机整合,完善生产程序与功能,大大减少了不必要的生产环节,能够大大提高生产效率,减少成本投入;另一方面,电气自动化中融入了信息技术,能够自动监测设备运行状态,发生故障时能够及时发现并实现自动化修复,保障设备处于最佳运行状态,有效减少设备维护检修的资金投入,增加企业经济效益。
螺旋式卸船机自主卸煤智能化系统设计

螺旋式卸船机自主卸煤智能化系统设计
钟彩霞;孙海龙;辛发礼;徐洪兵;王翔;谢天;李小平
【期刊名称】《今日制造与升级》
【年(卷),期】2024()4
【摘要】螺旋式连续卸船机作为一种高效连续型散货卸船机,在电厂码头的卸煤作业中得到广泛应用。
随着卸船的规模越来越大,对于高效化和自动化的要求也不断
提高。
在不改变现有就地手动操作功能的基础上,应用精确定位、三维测控、智能
控制、图像监控、安全防护等技术,提出卸船流程自动控制、连续卸船、三维感知、作业自适应、图像识别等方案,对螺旋式卸船机进行智能化升级改造,实现了卸船机
的智能远程自主卸船作业,提升了卸煤效率。
【总页数】3页(P121-123)
【作者】钟彩霞;孙海龙;辛发礼;徐洪兵;王翔;谢天;李小平
【作者单位】浙江浙能绍兴滨海热电有限责任公司;台州恒意重工机械有限公司;杭
州集益科技有限公司
【正文语种】中文
【中图分类】U653.928.1
【相关文献】
1.基于连续卸煤条件下的卸船机给料系统振动分析
2.螺旋式卸船机用于卸煤作业的状况分析及展望
3.关于螺旋式卸船机用于卸煤作业的情况考察及展望
4.卸煤机PLC控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
【CN209943369U】一种自动化设备十字形运转机构【专利】
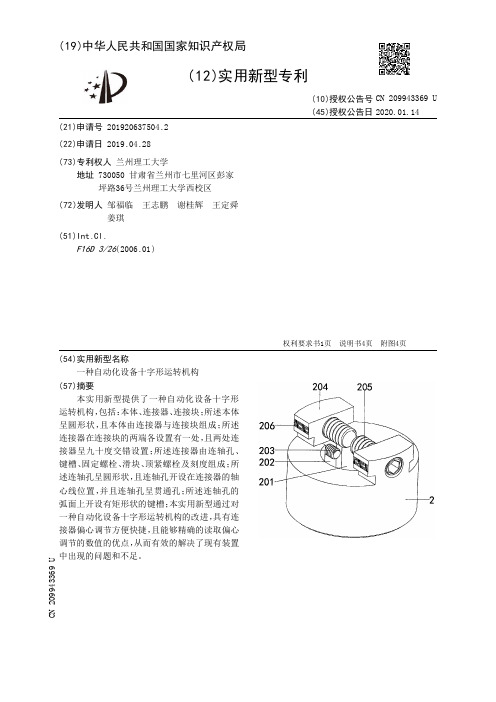
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920637504.2(22)申请日 2019.04.28(73)专利权人 兰州理工大学地址 730050 甘肃省兰州市七里河区彭家坪路36号兰州理工大学西校区(72)发明人 邹福临 王志鹏 谢桂辉 王定舜 姜琪 (51)Int.Cl.F16D 3/26(2006.01)(54)实用新型名称一种自动化设备十字形运转机构(57)摘要本实用新型提供了一种自动化设备十字形运转机构,包括:本体、连接器、连接块;所述本体呈圆形状,且本体由连接器与连接块组成;所述连接器在连接块的两端各设置有一处,且两处连接器呈九十度交错设置;所述连接器由连轴孔、键槽、固定螺栓、滑块、顶紧螺栓及刻度组成;所述连轴孔呈圆形状,且连轴孔开设在连接器的轴心线位置,并且连轴孔呈贯通孔;所述连轴孔的弧面上开设有矩形状的键槽;本实用新型通过对一种自动化设备十字形运转机构的改进,具有连接器偏心调节方便快捷,且能够精确的读取偏心调节的数值的优点,从而有效的解决了现有装置中出现的问题和不足。
权利要求书1页 说明书4页 附图4页CN 209943369 U 2020.01.14C N 209943369U权 利 要 求 书1/1页CN 209943369 U1.一种自动化设备十字形运转机构,包括:本体(1)、连接器(2)、连接块(3)、连轴孔(201)、键槽(202)、固定螺栓(203)、滑块(204)、顶紧螺栓(205)、刻度(206)、滑槽(301)、隔板(302);其特征在于:所述本体(1)呈圆形状,且本体(1)由连接器(2)与连接块(3)组成;所述连接器(2)在连接块(3)的两端各设置有一处,且两处连接器(2)呈九十度交错设置;所述连接器(2)由连轴孔(201)、键槽(202)、固定螺栓(203)、滑块(204)、顶紧螺栓(205)及刻度(206)组成;所述连轴孔(201)呈圆形状,且连轴孔(201)开设在连接器(2)的轴心线位置,并且连轴孔(201)呈贯通孔;所述连轴孔(201)的弧面上开设有矩形状的键槽(202);所述连接器(2)靠近连接块(3)的一侧通过螺纹啮合方式拧接有固定螺栓(203),且固定螺栓(203)靠近连接器(2)轴心线的一端贯穿键槽(202)的槽底;所述连接器(2)靠近连接块(3)的一端焊接有T形状的滑块(204),且滑块(204)在连轴孔(201)的两侧对称设置有两处;所述滑块(204)的中间部位通过螺纹啮合方式拧接有顶紧螺栓(205),且顶紧螺栓(205)的两端均贯穿滑块(204);所述滑块(204)T形状结构的两侧的直面上均开设有刻度(206);所述连接块(3)呈圆形状,且连接块(3)的两端均开设有T形状的滑槽(301),并且两处滑槽(301)呈九十度交错设置;所述滑槽(301)的中间位置设置有矩形状的隔板(302),且隔板(302)与连接块(3)设置为一体式结构。
智能建筑的设计初探

智能建筑的设计初探
狄文辉;邢军
【期刊名称】《河南师范大学学报:自然科学版》
【年(卷),期】2001(29)4
【摘要】建筑智能化就是应用现代 4C技术构成智能建筑的结构与系统 ,并结合现代化的服务与管理方式给人们提供一个安全、舒适的生活、学习与工作环境空间。
【总页数】4页(P118-121)
【关键词】智能建筑;一体化集成;自动化;网络;4C技术
【作者】狄文辉;邢军
【作者单位】河南机电高等专科学校
【正文语种】中文
【中图分类】TU855
【相关文献】
1.《智能建筑设计标准》与智能建筑发展——访现代设计集团华东建筑设计研究院有限公司资深总工程师温伯银 [J],
2.智能建筑设计初探 [J], 贾金锐
3.智能建筑中消防设施自动控制与互联网的设计初探 [J], 陶北平
4.智能建筑中弱电系统的防雷设计初探 [J], 甘焯荣
5.智能建筑中给排水实时控制系统设计初探 [J], 邓春燕
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动化机构设计构思》
三级项目报告
将曲柄运动变换为直线往复运动的机构
学院:机械工程学院
专业:机械设计
姓名:习卫娜
学号:110101020009
目录
一、机构简介 (2)
二、工作原理 (2)
三、三维模型 (2)
四、从动件分析 (3)
五、小结 (4)
一、机构简介
二、工作原理
图为将曲柄运动变换为直线往复运动的机构。
电动机1驱动曲柄轮2连续转动,通过连杆3使摇杆4作往复摆动;在摇杆4杆长的1/2处开有长孔,安装在工作台6上的滚轮5与之相配合,从而工作台6在摇杆4的带动下作直线往复运动,其行程等于曲柄轮2的半径(曲柄长度)。
该机构可用于中等载荷。
三、三维模型
图中支板设置为透明色,方便观察到整个机构的结构。
四、从动件分析
整个机构中,工作台作为从动件,因此对工作台进行了位移、速度、加速度分析。
该图为工作台的
位移曲线,由曲线可
看出运动周期约为
12s,行程约为7mm,
这与在绘制三维图时
曲柄轮半径相等,可
知满足机构要求。
该图为工作台的
速度曲线,由曲线可
看出工作台周期约为
12s,速度最大值为
3.2mm/s,整个运动过
程中较为平稳,接近
半个周期的正余弦运
动。
该图为工作台的
加速度曲线,由曲线
可看出周期约为12s,
这与速度曲线的结论
一致,加速度最大值
为1.9mm/s2,加速度
曲线平滑,无较大冲
击。
五、小结
在自动化机构的课程上,我学到了自己没有见到过的许多机构,同时比较了它们与我所知道的机构之间的差异,找出了它们的优缺点,这在我以后的课程设计以及毕业设计中起到很大作用,同时也启发了我在所学机构的基础上构建出新的机构的灵感。
在课程的大作业以及三级项目中,我利用三维软件进行三维模型的绘制,并进行位移、速度、加速度分析,这帮助我复习了自己学过的三维软件技能,同时对自己所绘制的机构有了更深理解,同时老师对于word文档的严格要求也使得我更加注重细节,不管是什么,都应该做到条理清楚,严于律己。
感谢老师长时间的教导,教会了我许多关于自动化机构方面的知识,我会在以后的课程设计以及毕业设计中充分应用,做到最好。