2011《非线性振动》试题解答解析
11年A答案草稿

一、 填空题1、第一空:质点组不受外力或所受外力的矢量和为零(1分) 第二空:质点组不受外力或所受外力对某定点的力矩的矢量和为零(1分)第三空:作用在质点组上的所有外力及内力都是保守力(或其中只有保守力做功)(2分,如无括号内的内容则1分) 2、作用在一力学体系上诸约束反力(评卷注意:不同参考书上对“约束反力”和“约束力”存在使用上的混淆,可以在评卷时适当放宽两个名词上的选用问题)在任意虚位移r δ中所作的虚功之和为零,即(4分)3、ae at 或ar (2分), be at 或br (2分)4、(每空1分)二、简答题(参考答案) 1、(1)平动,3(1分) (2)定轴转动,1(1分) (3)平面平行运动,3(1分) (4)定点转动,3(1分) (5)一般运动,6(2分)2、科氏加速度是由于在定系中的观察者来看,牵连运动使相对速度的方向发生改变,而相对运动又同时使牵连速度r ω⨯中的r 发生改变。
即科里奥利加速度v w'⨯2是由牵连运动与相对运动相互影响所产生的。
(6分) 3、虚位移:(2分)在质点系运动过程的某瞬时,质点系在约束允许的条件下,可能实现的任何无限小位移,称为质点系(在该瞬时)的虚位移。
01=⋅∑=i n i i r δR r v r ⨯+ωr r v ωr ωωr ωa ⨯+⨯⨯-⨯+2)()(r ωωr ω ⨯⨯-⨯r v ω ⨯2其与实位移的区别:(1)实位移是在一定的力作用下和给定的初条件下运动而实际发生的,虚位移是在约束容许的条件下可能发生的;(1分)(2)实位移具有确定的方向,可能是微小值,也可能是有限值,虚位移则是微小位移,视约束情况可能有几种不同的方向;(2分)(3)实位移是在一定的时间内发生的,虚位移只是纯几何的概念,完全与时间无关;(1分)(4)在定常约束下,微小的实位移必然是虚位移之一。
而在非定常约束下,微小实位移不再是虚位移之一。
(2分)三、分析题1、取坐标系如图点A坐标yA=ltanφ变分后的A的虚位移δy A=l δφ/cos2φC的虚位移δr c=aδφ(方向标记2分)(评分注意,如果解答时对题意出现误解,认为是沿Z轴的负方向转动,但A和C点的虚位移方向标识相一致,则可以考虑酌情给1分)(虚位移的关系式分析3分)2、C 点不是瞬心,因为必须用同一刚体上的两个速度来确定改刚体的瞬心,而V A 和V D 是不同刚体上的速度。
7模块七振动检测思考题与练习题分析
《传感器与检测技术项目教程》统一书号:ISBN 978-7-111-48817-0课程配套网站:或2015年2月第1版(主编:梁森、黄杭美、王明霄、王侃夫)模块七振动检测思考题与练习题解题分析参考(填空中的红色文字并不等于就是答案,只是给出了怎样选择A、B、C、D中正确的一个答案的分析方法)7-1 单项选择题1)___最简单___的振动量为时间的正弦或余弦函数,是最基本的机械振动形式。
A.随机振动B.瞬态振动C.简谐振动D.衰减振动2)振动角频率ω=1rad/s,f约为___一个rad等于2π___Hz。
A.1 B.πC.2πD.1/2π3)测得某简谐振动的峰峰值x pp=2V,则单峰值x p=___一半___V,有效值x=___1/(根号2)___V,平均值x=___(2/π)x p___V。
A.1 B.0.5 C.0.707 D.0.6374)某简谐振动的位移x=x m cos(ωt+φ)=1cos(2πft+0),测得x m=1m,f=50Hz,振动速度v=v m cos(ωt+φ+π/2)=-ωx m sin(ωt+φ)。
则振动速度的单峰值|v m|=___2πf___m/s。
A.1 B.π C.314 D.6285)某简谐振动的频率f=50Hz,振幅的单峰值x m=1mm。
根据式(7-4),加速度幅值a m≈___a m=ω2(x p/9.81)=4π2f2x m/9.81≈4f2x m=___(单位为g)。
A.1 B.104C.πf2D.1/(4f2x m)6)简谐振动的振动烈度v F=1mm/s,振动频率f=50Hz,则振幅峰峰值x pp=___可参考公式(7-5)___μm。
A.1 B.50 C.0.45 D.9A.1 B.50 C.0.45 D.97)将超声波(机械振动波)转换成电信号是利用压电材料的___力转换为电___;蜂鸣器中发出“嘀……嘀……”声的压电晶片发声原理是利用压电材料的___反过来___。
2011年高考物理各地试题分类汇编及解析
2011普通高校招生考试试题汇编-选修3-41(广东第18题).光电效应实验中,下列表述正确的是A.光照时间越长光电流越大B.入射光足够强就可以有光电流C.遏止电压与入射光的频率有关D.入射光频率大于极限频率才能产生光电子2(2011安徽第15题).实验表明,可见光通过三棱镜时各色光的折射率n 随着波长λ的变化符合科西经验公式:24BC n A λλ=++,其中A 、B 、C 是正的常量。
太阳光进入三棱镜后发生色散的情形如下图所示。
则 A .屏上c 处是紫光B .屏上d 处是红光C .屏上b 处是紫光D .屏上a 处是红光答案:D解析:白色光经过三棱镜后产生色散现象,在光屏由上至下(a 、b 、c 、d )依次为红、橙、黄、绿、蓝、靛、紫。
屏上a 处为红光,屏上d 处是紫光,D 正确。
3(2011全国卷1第16题)雨后太阳光入射到水滴中发生色散而形成彩虹。
设水滴是球形的,图中的圆代表水滴过球心的截面,入射光线在过此截面的平面内,a 、b 、c 、d 代表四条不同颜色的出射光线,则它们可能依次是A.紫光、黄光、蓝光和红光B.紫光、蓝光、黄光和红光C.红光、蓝光、黄光和紫光D.红光、黄光、蓝光和紫光解析:按照偏折程度从小到大的排序为d 、c 、b 、a 、故:折射率为:d c b a n n n n <<<频率为:d c b a f f f f <<<选B4(2011全国卷1第21题)一列简谐横波沿x 轴传播,波长为1.2m ,振幅为A 。
当坐标为x=0处质元的位移为2A -且向y 轴负方向运动时.坐标为x=0.4m处质元的位移为A 。
当坐标为x=0.2m 处的质元位于平衡位置且向y 轴正方向运动时,x=0.4m 处质元的位移和运动方向分别为ab cA .12A -、延y 轴正方向B . 12A -,延y 轴负方向C .A 、延y 轴正方向D .A 、延y 轴负方向 解析:选C5(2011海南18模块3-4试题).(12分)(1)(4分)一列简谐横波在t=0时的波形图如图所示。
非线性振动——精选推荐

非线性振动非线性振动§0.1非线性振动的研究对象在自然界、工程技术、日常生活和社会生活中,普遍存在着物体的往复运动或状态的循环变化。
这类现象称为振荡。
例如大海的波涛起伏、花的日开夜闭、钟摆的摆动、心脏的跳动、经济发展的高涨和萧条等形形色色的现象都具有明显的振荡特性。
振动是一种特殊的振荡,即平衡位置四周微小或有限的振荡。
如声波和超声波、工程技术中的机器和结构物的机械振动、无线电和光学中的电磁振荡等。
从最小的初等粒子到巨大的天体,从简单的摆到复杂的生物体,无处不存在振动现象。
有时人们力图防止或减小振动,有时又力图制造和利用振动。
尽管振动现象的形式多种多样,但有着共同的客观规律和同一的数学表达形式。
因此有可能建立同一的理论来进行研究,即振动力学。
振动力学是力学、声学、无线电电子学、自动控制理论等学科,以及机械、航空、土木、水利等工程学科的理论基础之一。
它应用数学分析、实验量测和数值计算等方法,探讨振动现象的机理和基本规律,为解决与振动有关的实际题目提供理论依据。
根据描述振动的数学模型的不同,振动理论区分为线性振动理论和非线性振动理论。
线性振动理论适用于线性系统,即质量不变、弹性力和阻尼力与运动参数成线性关系的系统,其数学描述为线性常系数常微分方程。
不能简化为线性系统的系统为非线性系统,研究非线性系统的振动理论就是非线性振动理论。
线性振动理论是对振动现象的近似描述,在振幅足够小的大多数情况下,线性振动理论可以足够正确地反映振动的客观规律。
频率、振幅、相位、激励、响应、模态等都是在线性理论中建立起来的基本概念。
实际机械系统中广泛存在着各种非线性因素,如电场力、磁场力、万有引力等作用力非线性,法向加速度、哥氏加速度等运动学非线性,非线性本构关系等材料非线性,弹性大变形等几何非线性等。
因此工程实际中的振动系统尽大多数都是非线性系统。
由于非线性微分方程尚无普遍有效的精确求解方法,而线性常微分方程的数学理论已十分完善,因此将非线性系统以线性系统代替是工程中常用的有效方法,但仅限于一定的范围。
第7章思考题与参考答案
第7章思考题参考答案1. 为什么说结构的自振频率是结构的重要动力特征,它与那些量有关,怎样修改它? 答:动荷载(或初位移、初速度)确定后,结构的动力响应由结构的自振频率控制。
从计算公式看,自振频率与质量与刚度有关。
质量与刚度确定后自振频率就确定了,不随外部作用而改变,是体系固有的属性。
为了减小动力响应一般要调整结构的周期(自振频率),只能通过改变体系的质量、刚度来达到。
总的来说增加质量将使自振频率降低,而增加刚度将使自振频率增加。
2.自由振动的振幅与那些量有关?答:振幅是体系动力响应的幅值,动力响应由外部作用和体系的动力特性确定。
对于自由振动,引起振动的外部作用是初位移和初速度。
因此,振幅应该与初位移、初速度以及体系的质量和刚度的大小与分布(也即频率等特性)有关。
当计及体系阻尼时,则还与阻尼有关。
3. 任何体系都能发生自由振动吗?什么是阻尼比,如何确定结构的阻尼比?答:并不是所有体系都能发生自由振动的,当体系中的阻尼大到一定程度时,体系在初位移和初速度作用下并不产生振动,将这时的体系阻尼系数称为临界组尼系数,其值为2m ω。
当阻尼系数小于该值时(称为小阻尼),可以发生自由振动。
阻尼比是表示体系中阻尼大小的一个量,它为体系中实际阻尼系数与临界阻尼系数之比。
若阻尼比为0.05,则意味着体系阻尼是临界阻尼的5%。
阻尼比可通过实测获得,方法有多种,振幅法是其中之一,振幅法确定阻尼比读者可见教材例题7-1。
4. 阻尼对频率、振幅有何影响?答:按粘滞阻尼(或等效粘滞阻尼)假定分析出的体系自振频率计阻尼与不计阻尼是不一样的,2者之间的关系为d ω=,计阻尼自振频率d ω小于不计阻尼频率ω,计阻尼时的自振周期会长于不计阻尼的周期。
由于相差不大,通常不考虑阻尼对自振频率的影响。
阻尼对振幅的影响在频比(荷载频率与自振频率的比)不同时大小不同,当频比在1附近(接近共振)时影响大,远离1时影响小。
为了简化计算在频比远离1时可不计阻尼影响。
机械系统非线性振动及其控制试题

机械系统非线性振动及其控制试题
1 如下图所示的三层楼房, 已知:第二层上作用有水平简谐荷载
kN , 用振型叠加法计算图示刚架各楼层的振幅值。
2 如下图所示,双质量弹簧系统在m1上作用一谐波激励F1sin ωt 。
已知,m1=m ,m2=2m ,k1=k2=k ,k3=2k ,试建立系统的振动方程,并用解耦分析法求系统的响应(初始位移和速度为零)。
3 非线性振动方程为
()cos 0.1
0.5 2.0
11()0
1111x f x p t
p or x x f x x x x +=Ω=Ω=->⎧⎪=-≤≤⎨⎪+<-⎩
采用分段积分求相图。
()P 20sin F t t ω=
4 选择一实际机构或结构,建立动力学模型和振动方程,并编制动力学分析程序,获得振动系统的响应图、频谱图、相图、庞加来截面图,以及系统振动随某参数的变化情况。
研究生课程考试答题册
学号
姓名
考试科目
考试日期
西北工业大学研究生院
wangsami@ 2013年3月1日之前。
非线性物理试题及答案

非线性物理试题及答案一、单项选择题(每题2分,共10分)1. 非线性物理中,下列哪个选项不是非线性系统的特征?A. 可积性B. 混沌现象C. 多值性D. 确定性答案:D2. 非线性动力学中,下列哪个方程是描述非线性振动的?A. 简谐振动方程B. 阻尼振动方程C. 范德波尔方程D. 线性耦合振动方程答案:C3. 在非线性系统中,下列哪个现象不是由非线性引起的?A. 倍周期分叉B. 相空间收缩C. 周期解D. 线性共振答案:D4. 非线性系统中,下列哪个概念与系统的稳定性无关?A. 李雅普诺夫指数B. 费根鲍姆常数C. 能量守恒D. 庞加莱映射答案:C5. 非线性光学中,下列哪个现象不是非线性效应?A. 光的二倍频B. 光的三倍频C. 光的偏振D. 光的自聚焦答案:C二、填空题(每题2分,共10分)6. 非线性系统的特点是_________,_________,和_________。
答案:不可预测性;多值性;混沌现象7. 非线性动力学中的_________现象是指系统在某些参数值下表现出的周期性行为突然消失,转变为混沌状态。
答案:倍周期分叉8. 在非线性系统中,_________指数是衡量系统稳定性的一个重要指标,它描述了系统轨迹在相空间中的发散或收敛速率。
答案:李雅普诺夫9. 非线性光学中的_________效应是指光在介质中传播时,光的折射率随光的强度变化而变化。
答案:克尔10. 非线性系统中的_________映射是一种在相空间中描述系统演化的数学工具,常用于研究系统的周期性和分叉行为。
答案:庞加莱三、简答题(每题10分,共20分)11. 简述非线性系统与线性系统的主要区别。
答案:非线性系统与线性系统的主要区别在于:(1)线性系统满足叠加原理,即系统的响应与输入成正比,而非线性系统不满足叠加原理,系统的响应与输入之间存在复杂的关系。
(2)线性系统的解通常是稳定的,而非线性系统的解可能是不稳定的,甚至可能出现混沌现象。
《机械振动》考试试题
2009--2011中南大学考试试卷一、填空题(本题15分,每空1分)1、按不同情况进行分类,振动系统大致可分成,线性振动和(非线性振动);(确定性振动)和随机振动;自由振动和(强迫振动);周期振动和(瞬态振动);(连续系统)和离散系统。
2、(惯性)元件、(弹性)元件、(阻尼)元件是离散振动系统的三个最基本元素。
3、系统固有频率主要与系统的(质量)和(刚度)有关,与系统受到的激励无关。
4、研究随机振动的方法是(概率统计),工程上常见的随机过程的数字特征有:(均值),(方差),(自相关函数)和(互相关函数)。
二、简答题(本题40分,每小题8分)1、简述机械振动的定义和系统发生振动的原因。
(10分)答:机械振动是指机械或结构在它的静平衡位置附近往复弹性运动。
振动系统发生振动的原因是由于外界对系统运动状态的影响,即外界对系统的激励或作用。
2、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。
答:实际阻尼是度量系统消耗能量的能力的物理量,阻尼系数c是度量阻尼的量;临界阻尼是c2enm ω=;阻尼比是/eccξ=(8分)3、共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?答:共振是指振动系统在激励频率约等于系统的固有频率时的振动状态。
在此过程中,激励力与阻尼力平衡,弹性力与惯性力平衡。
即动能与势能相互转化,激励力提供阻尼消耗。
4、简述线性系统在振动过程中动能和势能之间的关系。
(8分)5、简述刚度矩阵[K]中元素k ij的意义。
答:如果系统的第j个自由度沿其坐标正方向有一个单位位移,其余各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是kij(8分)三、计算题(45分)3.1、(10分)求如图1所示的扭转系统的固有频率。
图13.2、(15分)如图2所示系统,轮子可绕水平轴转动,对转轴的转动惯量为I,轮缘绕有软绳,下端挂有重量为P的物体,绳与轮缘之间无滑动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
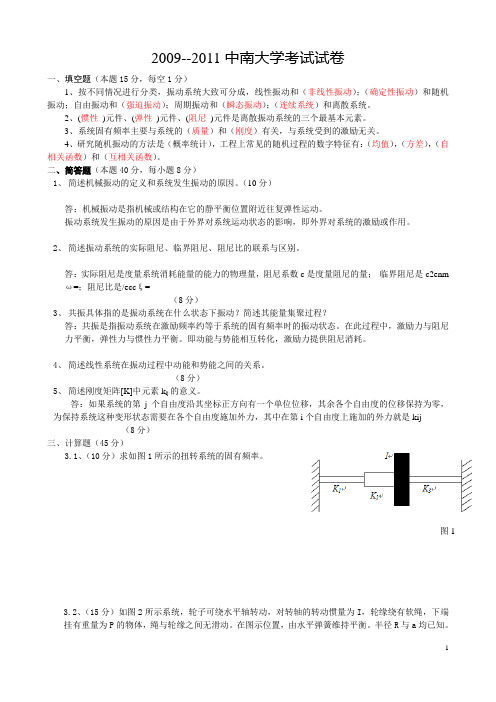
华中科技大学研究生课程考试试卷课程名称: 非线性振动与控制 课程类别 □公共课专业课 考核形式开卷□闭卷学生类别 考试日期 2011. 12. 21 学生所在院系 学号 姓名 任课教师题1:(20分)Consider the motion of a particle of mass m sliding freely on a wire described by parabola2z px = which rotates about the z -axis as shown in Figure 1. We assume that the wire is weightless and that its angular velocity Ωis changing with the position of the mass along the wire. There is no outside influence acting on the wire. (a) Show that the equations of motion are 20x x Ω+Ω=and 22222(14)4(2)0p x x p x x p g x +++-Ω=2x Ω=wherea constant of integration (essentiallythis is a statement of conservation of angularmomentum) and that the governing equation for x can be written in the form22224(14)4(2)0Hp x x p x x pg x x+++-= (c) Discuss the motion of the mass along parabola. Show that the motion is always bounded in this system.(d) For 1, 32.2, 1000p g h ===and 12H =, plot the trajectories in the phase plane.【注:这里g 为重力加速度,32.2g =这一值的单位为2ft /s 。
】题2:(20分)Determine the singular points and their types for the system2252x x y y xy =+-=-Figure 1 Particle on a rotating parabolaSketch the trajectories and the separatrices in the state plane.题3:(20分)Consider the motion of a system governed by230123(2||)0u u u u u u ωεμμμ++++=where 1ε<<.(a) Show that0cos()()u a t O ωβε=++where2231203043()38a a a a εμμωμωπ=-++ (Note that 3μ must be positive for a realistic system.)(b) Determine the stationary motions and their stability as a function of the magnitudes andthe signs of1μand 2μ.题4:(20分)Consider the system governed by2sin 2cos K t θθμθθ++=Ω(a) When Ω is near unity, show that for small but finite amplitudes of the response3202()cos[()]()a T T T O θεβε=++where 31sin 4a a k μγ'=-+21cos 16ka aγσγ'=++232,1and 2T k K γσβεσε=-=Ω-=Here ε is a measure of the amplitude of the response. Obtain the frequency-response equation.Show that 1/3max (4/)a k μ=. How does this value of max a compare with that the case of linear viscous damping? Plot a versus σ and k . Is there a jump phenomenon?(b) When Ω is near one third (superharmonic response), show that320209()cos[()]cos()()8a T T T K T O θεβε=++Ω+where223212()(cos sin )836a a a μμγγ'=-Λ+-Λ-232121()(sin cos )2836a a γσμγγΛ'=+Λ+++229,31,and 16T K k k γσβεσε=-=Ω-=Λ=Obtain the frequency-response equation. Plot a versus σ and Λ. Is there a jumpphenomenon?(c) When Ω is near 3 (subharmonic response), show that320201()cos[()]cos()()8a T T T K T O θεβε=+-Ω+where2221112()(sin cos )882a a a a μγμγ'=-Λ+-Λ-223111()3(cos sin )2882a a γσγμγ'=+Λ+-Λ+2213,3,and 16T K k k γσβεσε=-=Ω-=Λ= Obtain the frequency-response equation. Plot a versus σ and Λ. Is there a jumpphenomenon?题5:(20分)Consider the system shown in Figure 5 when the tension 0(1sin )T T t εω=+.(a) Show that the governing equation is221/202(1sin )()0mx T t x l x εω-+++=(b) Linearize the governing equation to obtain22002(1sin )0,T x t x mlωεωω++==(c) Determine second-order expansions for the transition curves separating stability frominstability when00,2ωωω≈(d) If 1/2()x O ε=, determine the influence of the nonlinear terms to first order when02ωω≈.Figure 5 Particle attached to stretched string注意:所有的题目并没有给出完整的解答,以此作为提供一个解题思路,希望自己推导一遍(使用自己习惯的一套符号),修改和完善其中的不妥之处,然后补全没有给出解答的部分即可。
切勿雷同!!!题一解:这题关键算Jacobi 积分,可以参考Nayfeh 的《非线性振动》第二章,或用Mathematica 软件计算。
本题有的地方推导过于简单,有些地方没有必要,希望稍作修改。
第三问的分析可能不太恰当!!! (a )系统动能为22222222222111()222111(2)()22211(41)22T mz mx m x m pxx mx m x m p x x m x =++Ω=++Ω=++Ω (1.1)系统的势能为2V mgz mgpx ==(1.2)代入Lagrange 方程d T T Vdt q q q∂∂∂-=-∂∂∂ (1.3)这里取广义坐标为ϕ和x ,其中ϕ是金属丝旋转过的角度,有关系ϕ=Ω,由此得到系统的运动微分方程20x x Ω+Ω=(1.4)22222(14)4(2)0p x x p x x pg x +++-Ω=(1.5)(b )积分式(1.4)得到2x Ω=(1.6)把式(1.6)代入式(1.5)并整理得到22224(14)4(2)0Hp x x p x x pg x x +++-= (1.7)(c )下面来求出描述相平面上的运动方程。
设42222(2)4,14gp H x x p xv x v v p x -+==-+ (1.8)从方程(1.8)中消去t ,我们得到42222(2)4(14)dv gp H x x p xv dx p x v-+=-+ (1.9)此式可以改写为2224221(14)()(2)402p x d v gp H x xdx p xv dx ++-+= (1.10)方程(1.10)积分有22222(14)2Hp x v gpx h x +++= (1.11)式中h 是常数。
方程(1.11)表明,此系统的T V +不是一个常数。
积分(1.11)称为Jacobi 积分。
改写(1.11)可以得到22222214h gpx H x v p x --=+ (1.12)并由此可以得出42222122232(2)48(2)(14)dv gp H x x hp x Hp xdx h gpx H x p x -+-=±--+ (1.13)注意到0,0H p >>,所以222h gpx H x h --≤-当2x = 式(1.12)右边分子必须半正定,即 220020h pgx H x ---≥(1.14)解得2x ≤≤(1.15)因此运动是有界的,它用围绕原点的一些闭轨线来表示,而原点是一个中心。
(d )编程的方法课上老师已经交给大家了,自己编写一小段程序即可。
下面的程序仅为示例,不是最终结果。
勿用此程序画的图。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%% 题一:画轨线图 %%%%%画一条曲线,先确定参数x 范围%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear all; clc; p=1.0; g=32.2; h=1000.0; H=12.0; dt=0.0001; x0=0.5;v0=0.5;II=6740;X(1:II)=0.0;V(1:II)=0.0;X(1)=x0;V(1)=v0;for i=2:IIx1=x0+v0*dt;v1=v0-((2*g*p-H/(x1^4))*x1+4*p^2*x1*v0^2)/(1+4*p^2*x1^2)*dt;x0=x1;v0=v1;X(i)=x0;V(i)=v0;endfigure;plot(X,V,'r');hold on;on;题二解: 因为2252x x y y xy =+-=- (2.1)所以系统的奇点满足225020x y xy +-=-= (2.2)由此解得奇点为1234(1,2),(1,2),(2,1),(2,1)s s s s ---- (1)对原方程在奇点1(1,2)s 附近线性化,得111111224x x y y x y =+=+ (2.3)系统矩阵的特征方程为 2360λλ--=(2.4)特征值为123322λλ+== (2.5)由于1λ和2λ异号,所以奇点1(1,2)s 为鞍点,它是一个不稳定奇点。