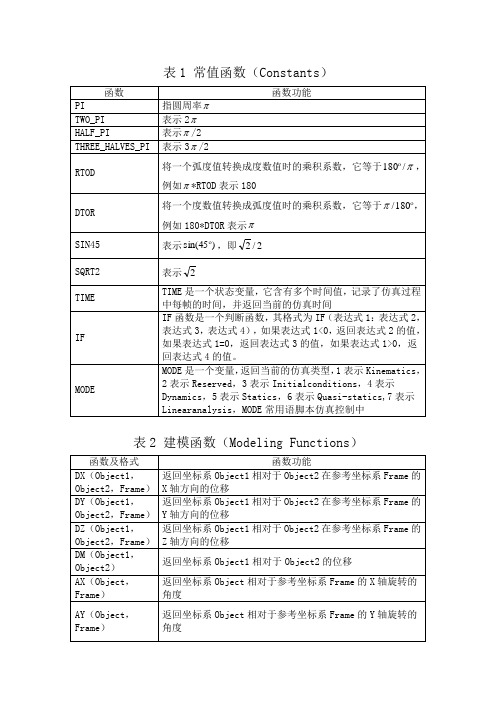
ADAMS常用函数
adams的函数用法

格式:STEP (x, x0, h0, x1, h1)
参数说明:
x :自变量,可以是时间或时间的任一函数
x0 :自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;
x1 :自变量的STEP函数结束值,可以是常数、函数表达式或设计变量
h0 :STEP函数的初始值,可以是常数、设计变量或其它函数表达式
表达式4:如果表达式1的值大于0,IF函数返回表达式4的值;
例如:函数 IF(time-2.5:0,0.5,1)
结果: 0.0 if time < 2.5
0.5 if time = 2.5
1.0 if time > 2.5
3、AKISPL函数
格式:AKISPL (First Independent Variable,Second Independent Variable,Spline Name,Derivative Order)
Stiffness Coefficient or K
刚度系统。
Stiffness Force Exponent
非线性弹簧力指数。
Damping Coefficient or C
阻尼系数。
Damping Ramp-up Distance
当碰撞力被激发阻尼逐渐增大的位移值。
-3.0 -2.5
-2.0 -1.2
-1.0 -0.4
0.0 0.0
1 0.4
2 1.2
3 2.5
4 3.6
4、碰撞函数impact
其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
格 式:IMPACT (Displacement Variable,Velocity Variable,Trigger for Displacement Variable,Stiffness Coefficient,Stiffness Force Exponent,Damping Coefficient,Damping Ramp-up Distance)
ADAMS常用函数

在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Function 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functions 8、Math Functions 9、Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明:x―自变量,可以是时间或时间的任一函数x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数IF(time-2.5:0,0.5,1)结果:0.0 if time < 2.50.5 if time = 2.51.0 if time >2.53、AKISPL函数格式:AKISPL (First Independent Variable, Second Independent Variable,Spline Name, Derivative Order)参数说明:First Independent Variable——spline中的第一个自变量Second Independent Variable (可选) ——spline中的第二自变量Spline Name——数据单元spline的名称Derivative Order (可选) ——插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
adams函数学习总结
矩阵/数组函数
• • • • 矩阵/数组的基本操作函数 ALIGN 将数组转换到从特定值开始 ALLM 返回矩阵元素的逻辑值 ANGLES 将方向余弦矩阵转换为指定旋转顺序下的 角度矩阵 ANYM 返回矩阵元素的逻辑和 APPEND 将一个矩阵中的行添加到另一矩阵 CENTER 返回数列最大、最小值的中间值 CLIP 返回矩阵的一个子阵 COLS 返回矩阵列数 COMPRESS 压缩数组、删除其中的空值元素(零,空字符及空格) CONVERT ANGLES 将313旋转顺序转化为用户自定义的旋转顺序 CROSS 返回两矩阵的向量积 DET 返回方阵M的行列式值
位置/方向函数
一、位置函数
LOC_ALONG_LINE LOC_CYLINDRICAL LOC_FRAME_MIRROR LOC_GLOBAL LOC_INLINE 下的坐标值并归一化 LOC_LOC 下的坐标值 LOC_LOCAL LOC_MIRROR LOC_ON_AXIS LOC_ON_LINE LOC_PERPENDICULAR LOC_PLANE_MIRROR LOC_RELATIVE_TO LOC_SPHERICAL LOC_X_AXIS LOC_Y_AXIS LOC_Z_AXIS 返回两点连线上与第一点距离为指定值的点 将圆柱坐标系下坐标值转化为笛卡儿坐标系下坐标值 返回指定点关于指定坐标系下平面的对称点 返回参考坐标系下的点在全局坐标系下的坐标值 将一个参考坐标系下的坐标值转化为另一参考坐标系
样条插值 AKIMA_SOLINE 使用Akima迭代插值法生成内插样条曲线 CSPLINE 生成3次内插样条曲线 CUBIC_SPLINE 生成3阶内插多项式曲线 DETREND 返回最小二乘拟合曲线与输入数据的差值 HERMITE_SPLINE 使用荷尔米特插值法生成内插样条曲线 LINEAR_SPLINE 线性插值生成内插样条曲线 NOTAKNOT_SPLINE 生成3次光顺连续插值样条曲线 SPLINE 生成插值样条曲线 频域分析 FFTMAG 返回快速傅立叶变换后的幅值 FFTPHASE 返回快速傅立叶变换后的相位 FILTER 返回按指定格式滤波处理后的数据 FREQUENCY 返回快速傅立叶变换频率数 HAMMING 采用HAMMING窗处理数据 HANNING 采用HANNING窗处理数据 WELCH 采用WELCH窗处理数据 PSD 计算功率谱密度
adams函数学习总结
二、三角函数 SIN(x) SINH(x) COS(x) COSH(x) TAN(x) TANH(x) ASIN(x) ACOS(x) ATAN(x) ATAN2(x1,x2) 切值
数字表达式x的正弦值 数字表达式x的双曲正弦值 数字表达式x的余弦值 数字表达式x的双曲余弦值 数字表达式x的正切值 数字表达式x的双曲正切值 数字表达式x的反正弦值 数字表达式x的反余弦值 数字表达式x的反正切值 两个数字表达式x1,x2的四象限反正
• • • • • • • • •
DIFF DIFFERENTIATE DMAT DOT ELEMENT EXCLUDE FIRST FIRST_N INCLUDE INTEGR INTERATE INVERSE LAST LAST_N MAX MAXI MEAN MIN MINI NORM2 NORMALIZE RECTANGULAR RESAMPLE RESHAPE RMS ROWS SERIES
0时返回absxsqrtx数字表达式x的平方根值数学函数二三角函数sinx数字表达式x的正弦值sinhx数字表达式x的双曲正弦值cosx数字表达式x的余弦值coshx数字表达式x的双曲余弦值tanx数字表达式x的正切值tanhx数字表达式x的双曲正切值asinx数字表达式x的反正弦值acosx数字表达式x的反余弦值atanx数字表达式x的反正切值atan2x1x2两个数字表达式x1x2的四象限反正切值三取整函数intx数字表达式x取整aintx数字表达式x向绝对值小的方向取整anintx数字表达式x向绝对值大的方向取整ceilx数字表达式x向正无穷的方向取整floorx数字表达式x向负无穷的方向取整nintx最接近数字表达式x的整数值rtoix返回数字表达式x的整数部分位置方向函数一位置函数localongline返回两点连线上与第一点距离为指定值的点loccylindrical将圆柱坐标系下坐标值转化为笛卡儿坐标系下坐标值locframemirror返回指定点关于指定坐标系下平面的对称点locglobal返回参考坐标系下的点在全局坐标系下的坐标值locinline将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值并归一化locloc将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值loclocal返回全局坐标系下的点在参考坐标系下的坐标值locmirror返回指定点关于指定坐标系下平面的对称点loconaxis沿轴线方向平移loconline返回两点连线上与第一点距离为指定值的点locperpendicular返回平面法线上距离指定点单位长度的点locplanemirror返回特定点关于指定平面的对称点locrelativeto返回特定点在指定坐标系下的坐标值locspherical将球面坐标转化为笛卡儿坐标locxaxis坐标系x轴在全局坐标中的单位矢量locyaxis坐标系y轴在全局坐标中的单位矢量loczaxis坐标系z轴在全局坐标中的单位矢量二方向函数orialignaxis将坐标系按指定方式旋转至与指定方向对齐所需旋转的角度orialongaxiseul将坐标系按指定方式旋转至与全局坐标系一个轴方向对齐所需旋转的角度oriallaxes将坐标系旋转至由平面上的点定义的特定方向第一轴与指定平面上两点连线平行第二轴与指定平面平行时所需旋转的角度orialongaxis将坐标系旋转至其一轴线沿指
ADAMS数学函数
LOC_ON_AXIS(Fra me,Distance,Axi s) LOC_ON_LINE(Loc ation1,location 2,Distance) LOC_PERPENDICUL AR(Location1,Lo cation2,Locatio n3) LOC_PLANE_MIRRO R(Location,Loca tion1,Location2 ,Location3) LOC_RELATIVE_TO (Location,Frame ) LOC_SPHERICAL(R ho,Theta,Phi) LOC_X_AXIS(Fram e) LOC_Y_AXIS(Fram e) LOC_Z_AXIS(Fram e)
将一个坐标系 Frame 某个轴与另一个坐标系 Frame 的某个轴 重合时,需要转过的角度,Axis Spec 可以是 xx,xy,xz, ORI_ALIGN_AXIS( yx,yy,yz,zx,zy,zz,x+x,x+y,x+z,y+x,y+y,y+z,z+x, Frame,Axis Spec) z+y,z+z,x-x,x-y,x-z,y-x,y-y,y-z,z-x,z-y 和 z-z,+表示 正的方向,-表示反方向,例如 ORI_ALIGN_AXIS(marker_1, “z-z”),返回值与当前的旋转序列有关 Location1-Location3 确定一个坐标系,Axes 确定坐标系的 轴,Axes 的取值为 xy,yx,xz,zx,yz 和 zy,Axes 确定的 ORI_ALL_AXES(Lo 第一个轴与 Location1 和 Location2 确定的直线平行,Axes cation1,Locatio 确定的第二个轴在 Location1,Location2,Location3 平面 n2,Location3,Ax 内, ORI_ALL_AXES 返回坐标系的按照 313 旋转序列的欧拉角, es) 例如 ORI_ALL_AXES({{14,18,0},{10,14,0},{16,14,0}}, “xz”) 将一个坐标系的某个轴转到与一条直线平行时,需要旋转的 ORI_ALONG_AXIS( 角度,其中 From Frame 确定直线的起始点,To Frame 确定 From Frame,To 直线的终止点, Axis 的取值为 x, y 或 z, 例如 ORI_ALONG_AXIS Frame,Axis) (marker_1,marker_2,“y”) ORI_ALIGN_AXIS_ 将一个坐标系的一个轴与另一个坐标系的一个轴旋转到平
adams常见函数总结

ADAMS常用函数总结在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Fu nction 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functi ons 8、Math Functions 9、Data Element Access 10、User-Written SubroutineInvocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明:x―自变量,可以是时间或时间的任一函数x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数IF(time-2.5:0,0.5,1)结果:0.0 if time < 2.50.5 if time = 2.51.0 if time >2.53、AKISPL函数格式:AKISPL (First Independent Variable, Second Independent Variable,SplineName, Derivative Order)参数说明:First Independent Variable——spline中的第一个自变量Second Independent Variable (可选) ——spline中的第二自变量Spline Name——数据单元spline的名称Derivative Order (可选) ——插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
ADAMS函数简介
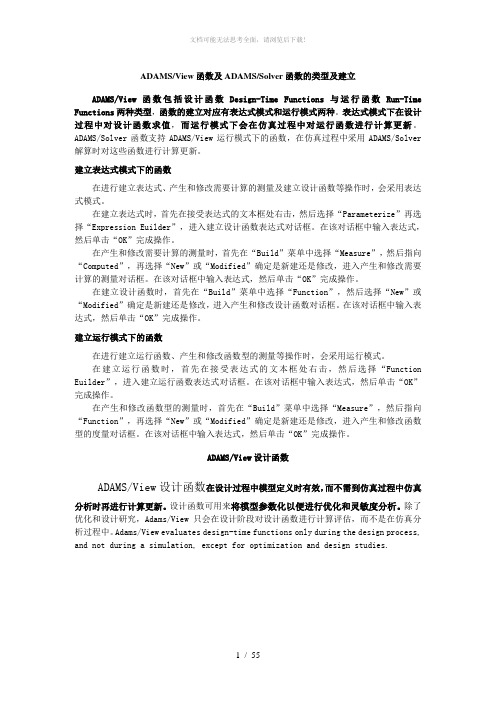
ADAMS/View函数及ADAMS/Solver函数的类型及建立ADAMS/View函数包括设计函数Design-Time Functions与运行函数Run-Time Functions两种类型,函数的建立对应有表达式模式和运行模式两种。
表达式模式下在设计过程中对设计函数求值,而运行模式下会在仿真过程中对运行函数进行计算更新。
ADAMS/Solver函数支持ADAMS/View运行模式下的函数,在仿真过程中采用ADAMS/Solver 解算时对这些函数进行计算更新。
建立表达式模式下的函数在进行建立表达式、产生和修改需要计算的测量及建立设计函数等操作时,会采用表达式模式。
在建立表达式时,首先在接受表达式的文本框处右击,然后选择“Parameterize”再选择“Expression Euilder”,进入建立设计函数表达式对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在产生和修改需要计算的测量时,首先在“Build”菜单中选择“Measure”,然后指向“Computed”,再选择“New”或“Modified”确定是新建还是修改,进入产生和修改需要计算的测量对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在建立设计函数时,首先在“Build”菜单中选择“Function”,然后选择“New”或“Modified”确定是新建还是修改,进入产生和修改设计函数对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
建立运行模式下的函数在进行建立运行函数、产生和修改函数型的测量等操作时,会采用运行模式。
在建立运行函数时,首先在接受表达式的文本框处右击,然后选择“Function Euilder”,进入建立运行函数表达式对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在产生和修改函数型的测量时,首先在“Build”菜单中选择“Measure”,然后指向“Function”,再选择“New”或“Modified”确定是新建还是修改,进入产生和修改函数型的度量对话框。
adams中函数用法
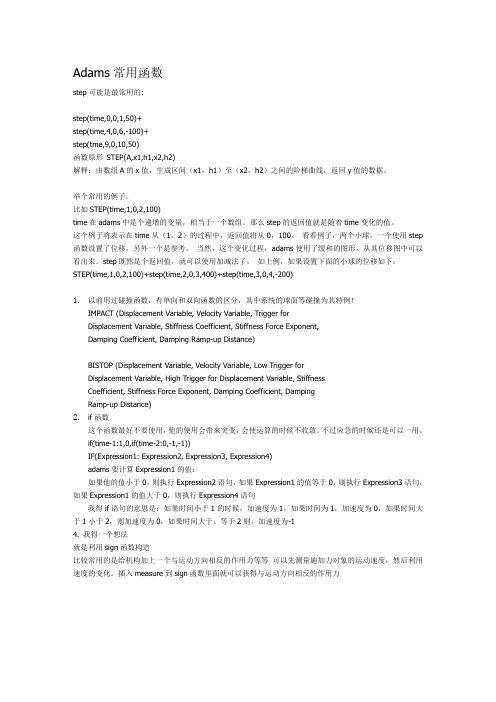
Adams常用函数step可能是最常用的:step(time,0,0,1,50)+step(time,4,0,6,-100)+step(tme,9,0,10,50)函数原形STEP(A,x1,h1,x2,h2)解释:由数组A的x值,生成区间(x1,h1)至(x2,h2)之间的阶梯曲线,返回y值的数据。
举个常用的例子。
比如STEP(time,1,0,2,100)time在adams中是个递增的变量,相当于一个数组。
那么step的返回值就是随着time变化的值。
这个例子将表示在time从(1,2)的过程中,返回值将从0,100。
看看例子,两个小球,一个使用step 函数设置了位移,另外一个是参考。
当然,这个变化过程,adams使用了缓和的图形,从其位移图中可以看出来。
step既然是个返回值,就可以使用加减法了。
如上例,如果设置下面的小球的位移如下:STEP(time,1,0,2,100)+step(time,2,0,3,400)+step(time,3,0,4,-200)1.以前用过碰撞函数,有单向和双向函数的区分,其中系统的球面等碰撞为其特例!IMPACT (Displacement Variable, Veloci t y Variable, Trigger forDisplacement Variable, Stiffness Coefficient, Stiffness Force Exponent,Damping Coefficient, Damping Ramp-up Distance)BISTOP (Displacement Variable, Velocity Variable, Low Trigger forDisplacement Variable, High Trigger for Displacement Variable, StiffnessCoefficient, Stiffness Force Exponent, Damping Coefficient, DampingRamp-up Distance)2.if函数这个函数最好不要使用,他的使用会带来突变,会使运算的时候不收敛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Function 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functions 8、Math Functions 9、Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!
1、STEP函数
格式:STEP (x, x0, h0, x1, h1)
参数说明:
x―自变量,可以是时间或时间的任一函数
x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;
x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量
h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式
h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式
2、IF函数
格式:IF(表达式1: 表达式2, 表达式3, 表达式4)
参数说明:
表达式1-ADAMS的评估表达式;
表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;
表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;
表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;
例如:函数IF(time-2.5:0,0.5,1)
结果:0.0 if time < 2.5
0.5 if time = 2.5
1.0 if time >
2.5
3、AKISPL函数
格式:AKISPL (First Independent Variable, Second Independent Variable,Spline Name, Derivative Order)
参数说明:
First Independent Variable——spline中的第一个自变量
Second Independent Variable (可选) ——spline中的第二自变量
Spline Name——数据单元spline的名称
Derivative Order (可选) ——插值点的微分阶数,一般用0就可以
function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)
spline_1用下表中的离散数据定义
自变量x 函数值y
-4.0 -3.6
-3.0 -2.5
-2.0 -1.2
-1.0 -0.4
0.0 0.0
1 0.4
2 1.2
3 2.5
4 3.6
4、碰撞函数impact
其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
格式:IMPACT (Displacement Variable, Velocity Variable, Trigger for Displacement Variable, Stiffness Coefficient, Stiffness Force Exponent, Damping Coefficient, Damping Ramp-up Distance) 参数说明:
Displacement Variable
实时位移变量值,通过DX、DY、DZ、DM等函数实时测量。
Velocity Variable
实时速度变量值,通过VX、VY、VZ、VM等函数实时测量。
Trigger for Displacement Variable
激发碰撞力的位移测量值。
Stiffness Coefficient or K
刚度系统。
Stiffness Force Exponent
非线性弹簧力指数。
Damping Coefficient or C
阻尼系数。
Damping Ramp-up Distance
当碰撞力被激发阻尼逐渐增大的位移值。
5、bistop函数
它的格式是BISTOP( x, dx, x1, x2, k, e, cmax, d)这里它由八个参数定义。
它与函数IMPACT类似。
可以这么说:BISTOP是双侧碰撞函数,而IMPACT是单侧碰撞函数。
BISTOP的触发是由两个边界条件确定的,即x1和x2,当x值大于或等于x1且小于或等于x2时,函数值为0,当x值大于x2或小于x1时,它的值是不同的。
当x小于x1时,返回值是:k(x1-x)^e-cmax*dx*step(x,x1-d,1,x1,0),当x大于x2时,返回值是:k(x-x2)^e-cmax*dx*step(x,x2,1,x2 d,0)。
各种参数表示意义可以从IMPACT里推出来,它只是多了一个x2。
本文出自: 模具家园论坛(/)
原文链接:/thread-22128-1-1.html
6.、设计变量(Design Variable)与状态变量(State Variable)的比较:设计变量只是一个预处理符号,给定值后,在仿真过程中不会改变,又称为ADAMS/View变量,在ADAMS/View 数据浏览器中简称为variable。
状态变量,其值在每个仿真步长中都在发生变化,又称为ADAMS/Solver变量,在ADAMS/View数据浏览器中称为ADAMS/Variable,而在ADAMS/Solver 数据集中称为VARIABLE。
7.MOTION函数
格式为MOTION(id,jflag,comp,rm)
Id:整型数据,指定MOTION的id号。
Jflag:整型数据,指定所需计算的力或力矩的MARKER点。
0:指定为I MARKER;1:指定为J MARKER。
Comp:整型数据,指定力或力矩的分量类型。
1=合力;
2=作用力在x方向的分量;
3=作用力在y方向的分量;
4=作用力在z方向的分量;
5=合力矩;
6=力矩在x方向的分量;
7=力矩在y方向的分量;
8=力矩在z方向的分量。
rm:指定坐标系,若设置为0,表示为全局坐标系。
例如:MOTION(.model_1.MOTION_1,0,5,0)
7、在使用ADAMS 进行建模和仿真时,与ADAMS/Solver有关的需要注意的问题如下:(1)建模时应尽量避免不连续的出现。
(2)在可行的情况下,总是首先进行STATIC 分析。
有时静平衡会比动力学分析更难达到。
到时只关心系统的动态行为而无法得到静平衡,可以增加STATIC D的Error或者跳过STATIC 分析。
(3)如果GSTIFF 在开始阶段就出错,或者根本无法开始计算。
这通常是初始条件(Initial Condition)造成的,这时应当设定Hinit值,使积分不至于在起步阶段发散。
(4)在一些特殊情况下,例如脉冲激励时,应通过Hmax来控制积分步长。
此时Hmax应当小于脉冲宽度。
(5)若计算结果存在明显不合理的尖峰,通常是由于积分步长的改变造成的,此时可以降低Hmax或者设Hinit=Hmax。
(6)STATIC 分析时很难的分析,尤其是初始位置离平衡位置远时。
当静平衡无法达到时,通常采用下列方法:
1)增大Maxit,如200;
2)调整Stability,采用逐步逼近的方法达到平衡;
3)减小Alimit,通常为30D,对于一些有问题的模型可以设定其为10D。