斯伦贝谢钻井新技术
美国斯伦贝谢随钻声波测井新技术
根 据 所 需 的 物 理 记 录, 可 将 声
波信号中识别出来 [1]。
波测井仪设计成一组发射器(声源),
很 多 物 质 都 有 各 自 具 体 的 声 波 用于产生特定形式的压力脉冲。最基
慢度(下表)。例如纵波通过钢材的 本 的 方 式, 也 是 各 种 声 波 测 井 仪 常
慢度是 187 微秒 / 米(57 微秒 / 英尺)。 用 的 类 型 是 单 极 子 声 源。 单 极 子 声
波快。
于快地层这种情况。
声源的测井仪记录的资料中提取。在
临界折射的纵波在井筒中产生的
如果地层的横波慢度大于井筒流 非常需要这些资料的井段通常也无法
头波以地层纵波速度传播 [3]。根据惠 体的纵波慢度(这种情况被称为慢地 获得。
更斯原理,井壁上每一点上的纵波都 层),纵波在到达井筒时仍然会发生折
单极子声源在测量慢地层横波资
偶极子声源也具有定向性,利用
ཀྵհ
࢙հ
ୁ༹հ
ጻհ ཀྵհ
ୁ༹հ
定向接收器阵列和两个互成 90°的声 源,工程师能够得到井筒周围的定向 横波资料。这种交叉偶极测井方法提 供了最大、最小应力方位,径向速度
ڇटጱำᇸ
ڇटጱำᇸ
分布和各向异性横波资料的方向。 上世纪 80 年代引入了将快地层中
使用的单极子声源纵波和横波数据与
Jeff Alford Matt Blyth Ed Tollefsen 美国得克萨斯州休斯敦
John Crowe 雪佛龙卡宾达海湾石油有限公司 安哥拉罗安达
Julio Loreto 得克萨斯州Sugar Land
Saeed Mohammed 沙特阿拉伯宰赫兰
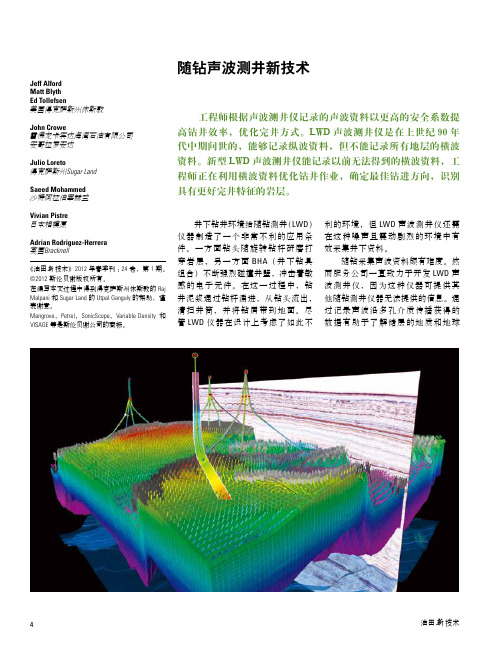
随钻声波测井新技术
工程师根据声波测井仪记录的声波资料以更高的安全系数提 高钻井效率,优化完井方式。LWD 声波测井仪是在上世纪 90 年 代中期问世的,能够记录纵波资料,但不能记录所有地层的横波 资料。新型 LWD 声波测井仪能记录以前无法得到的横波资料,工 程师正在利用横波资料优化钻井作业,确定最佳钻进方向,识别 具有更好完井特征的岩层。
【采油 精】旋转导向技术-斯伦贝谢

400
Footage Drilled per Quarter
900,000
Average MTBF
350
800,000 300
700,000
250 600,000
500,000
200
400,000 150
300,000 100
200,000
50 100,000
-
0
Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2
2001 World Record #2 PowerDrive900 drills 13.789ft of 12.25” hole in 1 run
2002 World’s First 6” RSS Run PowerDrive475 drills 4712ft of 6 1/8” hole in 1 run
Saved $536,000 1739m , 5705 ft 17.6 m 57.6 ft/hr
Inclination In 74.9 Out 51.1 Turned 10 right
旋转导向 - PowerDrive
• Improved drilling efficiency – 98 m/day with PDM, 193 m/day with RSS
旋转导向 – PowerDrive Xceed
Point-The-Bit Principle
旋转导向 – PowerDrive Xceed
钻进
内部控制导向系统
导向钻进
旋lumberger Rotary Steerable Experience
斯仑贝谢成像测井技术
成像测井技术目录1电成像测井 (2)1.1 地层微电阻率扫描成像测井技术[1] (2)1.2 阵列感应成像测井技术 (3)1.3方位电阻率成像测井技术 (4)2声波成像测井 (4)2.1超声波成像测井 (5)2.2偶极横波成像测井 (6)3核磁共振成像测井 (6)4成像测井技术的应用 (7)4.1岩性识别 (7)4.2沉积构造识别[4] (10)4.3沉积微相研究[5] (12)4.4裂缝系统的分析 (14)4.5地应力分析[11] (29)5成像测井的发展趋势 (32)参考文献 (33)成像测井技术测井起源于1927年的法国,当时只有测量视电阻率、自然电位、井温等仪器,经过近80年的发展,如今发展成为以电法测井仪、声波测井仪与核磁共振测井仪等系列的测井仪器。
回顾测井技术的发展历程,测井技术经历了从模拟测井到数字测井、数控测井、成像测井的发展历程。
成像测井技术是美国率先推出的具有三维特征的测井技术,是当今世界最新的测井技术。
它是在井下采用阵列传感器扫描测量或旋转扫描测量,沿井眼纵向、径向大量采集地层信息,利用遥传将采集到的地层信息从井下传到地面,通过图像处理技术得到井壁二维图像或井眼周围某一探测范围内的三维图像。
因此,成像测井图像比以往的曲线表达方式更精确、更直观、更方便。
传统的测井只能获取井下地层井眼周向和径向上单一的信息,它适用于简单的均质地层。
而实际上地层是非均质的,尤其是裂缝性油气层的非均质性最为明显,在地层的周向和径向上的非均质性也非常突出。
这促使人们开始利用非均质和非线性理论来设计测井仪器。
成像测井技术就是在此理论基础上发展起来的,它能获取井下地层井眼周向方位上和径向上多种丰富的信息,能够在更复杂、更隐蔽的油气藏勘探和开发方面有效的解决一系列问题:薄层、薄互层、裂缝储层、低孔隙低渗透层、复杂岩性储层评价;高含水油田开发中剩余油饱和度及其分布的确定;固井质量、压裂效果、套管井损坏等工程测井问题以及地层压力、地应力等力学参数的求取等等。
国外斯伦贝谢电缆测井新技术与应用

斯伦贝谢测井技术的主要发展阶段 -适应油气藏勘探开发的需要
1990年以前
1990年-2000年 2000年-2006年
常规三组合
PeX+元素 声、电成像
扫描 Scanner 系列
SonicScanner MR/RtScanner
2006年-2015年
扫描 Scanner系 列+无化学源新
电缆测井新技术与应用
基于传统“三组合”测井的储层测井解释模型
油气 骨架 粘土
水
W体水a积te模r型 骨架(75%-85%) 流体-水/油气(15%-25%)
传统的9条曲线三组合 测井
自然伽玛-自然电位-井径:储 层
油气 密度-中子-声波:孔隙度
电阻率(深/中/浅):饱和
粘土
度
岩性密度/介电/核磁
元素能谱测井的原理和过程– 矿物组份和总有机碳量化
将元素干重曲线处理 解释得到矿物组份、 骨架特征参数和总有 机碳含量(TOC)
最新元素测井仪器 - 岩性扫描测井 LithoScanner
仪器设计的创新与突破 高性能的中子发生器(PNG),其输出中子 速度高达每秒3×108个,是普通中子管的2 倍、化学源的8倍以上 掺铈溴化镧(LaBr3:Ce)大晶体探测器, 精度比锗酸铋(BGO)探测器提高两倍以上, 在不牺牲光谱分辨率条件下处理超过每秒 2,500,000计数的计数率,同时高低温性能 优越 改善了原有元素测量精度和准确度
海相
陆相
海陆过渡相
复杂储层的地层测井解释模型
矿物骨架
孔隙
流体类型
体积模型
骨架(>90%) 流体-水/油气(<10%)
传统的9条曲线三组合测 井
基础研究是石油工程高质量发展基石——斯伦贝谢测井科技发展剖析及启示

n stries行业422023 / 08 中国石化基础研究是石油工程高质量发展基石——斯伦贝谢测井科技发展剖析及启示斯伦贝谢(SLB)公司的测井技术一直是当今世界测井技术的前沿,世界上第一套数字测井仪、第一套数控测井仪和第一套成像测井仪都出自斯伦贝谢。
科技是斯伦贝谢最重要的发展基石,斯伦贝谢从建立之初就高度重视基础研究和前瞻研究,斯伦贝谢道尔研究中心在电磁学、地声学、核学等方面的基础研究有力支撑了斯伦贝谢测井技术的发展。
剖析研究斯伦贝谢在基础研究方面的布局经验,可为中国石化石油工程在基础研究和前瞻研究方面“下好先手棋、打好主动仗”提供经验借鉴。
斯伦贝谢基础研究的沿革及特点斯伦贝谢高度重视基础前瞻研究,在公司业务稳定后就设立了研究中心开展基础研究和前瞻研究。
1948年,斯伦贝谢在美国康涅狄格州里奇菲尔德成立了研究中心(后更名为斯伦贝谢道尔研究中心),是斯伦贝谢最早开展基础研究的机构,时至今日仍是斯伦贝谢最重要、核心的研究中心,从最初的4个测井学科研究部门发展成为3个测井研究中心。
构建多层级基础研发体系,设立稳定的基础研究机构。
为保证技术的先进性和前瞻性,斯伦贝谢构建多层级研发体系,从事不同层次的基础研究和前瞻研究,分别设立美国道尔研究中心、英国剑桥研究中心和挪威斯塔万格研究中心,主要研究10~50年内不同技术方向不同层次的石油工程技术的基础研究和前瞻研究:道尔研究中心主要进行传感器、数学和建模、油气藏储层、地球科学、机械学和材料科学、碳捕获与封存、机器人等领域基础研究;英国剑桥研究中心主要开展钻完井技术、流体技术、地震以及岩石力学等方面应用研究;挪威斯塔万格研究中心主要致力于地震图像解释、地表和地下测量数据的自动分析和建模等应用研究。
此外,斯伦贝谢在全球还设有11个技术研发中心(包括北京地球科学中心BGC),主要从事石油工程领域10年内的技术和产品研发。
持续打造高水平基础研究团队。
道尔研究中心基础研究团队由来自全球多个国家的科学家和工程师组成,多数都已拿到博士学位,并且具备多年相关行业研究经验。
2014斯伦贝谢公司石油工程新技术(三)

2014斯伦贝谢公司石油工程新技术(三)1. TCC HAMMERMILL技术TCC HAMMERMILL技术通过将基液与钻屑分离,来降低岩屑对环境的影响。
其可使固体上的油涂层蒸发,而不会破坏钻井液的有机馏分。
处理后的钻屑非常干净,含油量不到总石油烃含量的1%,可直接处理或用作建筑填料。
除了清洁钻屑外,TCC HAMMERMILL系统还可用于清洁储油罐底层的污物与油泥。
2. WellWatcher 远程监测系统WellWatcher远程监测系统采用具有超低功率电子设备的井下测量仪器和地面设备,其中,电子设备由位于地表的单个小锂电池驱动。
它通过精确的井下测量值来进行实时评估,帮助石油公司在油井或油田开采期内优化井生产率,提高油气采收率。
WellWatcher远程监测系统的特点包括:用户界面简单,储层条件下测量可靠且稳定,具有多支路能力,可用于没有永久电源的边远地区等。
3. Petrel Shale软件Petrel Shale软件用来提供从页岩油气勘探到开采整套工作流程的解决方案,包括优化工作流程,提高投资效率等。
客户可以根据自己需求来定制该软件。
同时,基于地理地质信息的评估模型,客户可以自行完成决策,梳理工作流程,实现资本回报的最大化。
4. IsoMetrix海洋等距地震技术IsoMetrix海洋等距地震技术主要适合深海勘探作业。
其能够传输高保真地震数据,同时克服空间带宽兼顾问题,突破了常规海洋地震采集方法的局限。
斯伦贝谢的IsoMetrix海洋等距地震技术目前已经在4大洲部署。
5. Quanta Geo储层地质仿真技术Quanta Geo储层地质仿真技术通过采用业内首个微型电阻率成像仪,有针对性地形成井底油基泥浆(OBM)仿真芯形图片。
其特点为:具有独特的测井能力,能够提供高质量数据,具有不受限制的全新物理成像技术,在高测井速度下能够进行仿真成像,使用Techlog平台进行储层建模,从而实现最高质量最低风险的钻井作业。
大斜度水平井生产测井技术(斯伦贝谢)

大斜度/水平井生产测井技术Schlumberger Private斯伦贝谢Schlumberger Private水平井生产所面临的挑战•初期产量较高•含水上升快•产量递减快•产液剖面测量难•井段产液不均匀•措施作业难•有效期较短…主要难点:¾井下多相流态复杂¾产液剖面测量仪器¾仪器传输方式Schlumberger Private油水均匀混合 速度剖面光滑 持率线性变化 单相水在底部,分散相油在顶部速度和持率变化剧烈水有可能回流分层流动,油水分异呈单相井斜微变,相速度和持率剧变井斜<20°井斜20°~85°井斜85°~95°复杂多相流流态-油水两相流试验Schlumberger Private水平井产液剖面测量-流体扫描成像Flow Scanner具有5个微转子测量分层流速,6对光学和电阻探针测量分层三相持率,实时监测数据质量Schlumberger PrivateFlow Scanner* 仪器示意图H y dra u l i c a c t u a t o r F l ow S c a n n e r *4 MS5 O P、5E P1 mi n i s p i n n e r , 1o p t i c a l p r o b e , 1e l e c t r i c a lp r o b e Minispinner cartridgewith integrated one-wire detectorFluid local velocityOptical GHOST*probesGas holdupElectrical FloView*probesWater holdup5 ft11 ftSchlumberger PrivateFlow Scanner* 流速传感器相速度-Minispinner最新技术;5个微型转子流量计垂直于井轴方向分布; 直接测量气相速度;电动短节扫描转子流量计,精确测定相速度。
斯伦贝谢钻井新技术
PowerDrive X6 – Push the bit
Direct side force
PowerDrive Xceed – Point the bit
Drive shaft @offset angle to the collar Drilling tendency
26
382 575
716
1145 0
Inclination (deg)
Schlumberger Private
实际钻井中遇到的难点实例
Build Angle from 40 to 60 deg with Mud Motor 60
55
50
45
40
1150
1200
1250
1300
1350
Depth (m)
马达滑动/复合钻进中,井壁不光滑
TeleScope
EcoScope
滑动钻进中不能获取成像资料
Motor
D&I 20.40m
测量点距离钻头很远
GR/Res 12.80m
5
Inclination (deg) Inclination (deg)
Footage/day (m/day)
为什么选择旋转导向系统
TeleScope TeleScope
Schlumberger Private
17
Schlumberger Private
PowerDrive Xceed工作原理
所有部件全旋转,优化井 眼状况
近钻头井斜 方位测量,更 好保证井眼轨迹的准确度
井眼轨迹光滑,完井管柱 入井易
造斜率稳定 适合于高研磨或具有挑战
的环境 自动巡航模式
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
25
斯伦贝谢新型旋转导向系统
0
Point Push High the Motors Dogleg Bit Systems RSS
Motor
382
TVD ft
BUR
Schlumberger Private
15˚/30m
PowerDrive X6 – Push the bit
8 1/2" Section
1) 测量点距离钻头更近
- 精确控制井眼轨迹 / 适合地质导向
2) 良好的井眼质量
- 减少了井眼屈曲
TJH-21 (Motor Curve)
60
Mala H-5 Survey TJH-21 Survey TJH-21 Cont (1225)
60
Mala H-5 (PowerDrive Curve)
Direct side force
575
10˚/30m
716
8˚/30m
PowerDrive Xceed – Point the bit
Drive shaft @offset angle to the collar
5˚/30m
Drilling tendency
1145
0 382 575 716
VS ft
1500
2000
2500
3000
XJ24-3 A-14
3500 斜深9236m , 水平位移8062m
8
斯伦贝谢旋转导向系统
PowerDrive X6 PowerDrive Xceed PowerDrive vorteX
Schlumberger Private
全程同步旋转 井眼自动化控制
提高工具可靠性与 钻井表现
26 in–17½ in 井眼 14¾ in–12¼ in井眼
独特的工作原理 减少与井壁接触
更高改变井眼轨 迹能力
井下附加动力 可使用 或 承受更大钻压,输出 更高扭矩
26 in–17½ in井眼
14¾ in–12¼ in井眼
14¾ in–12¼ in井眼
10 5/8 in井眼
9 7/8 in–8½ in井眼 6½ in–5¾ in井眼 9 7/8 in–8½ in井眼
向系统的优势。
28
Schlumberger Private
汇 报 结 束
谢 谢!
29
– PowerDrive钻井的所有性能
– 整体化的动力短节总成可将泥 浆水力动能转化为钻头的机械 动能 – 钻头高扭矩、高速旋转 – 高效的轴承和传动机构
Schlumberger Private
– 外部部件全部与钻柱一起旋转
导向部分
– 钻柱旋转速度可调范围更大 – 扶正器数量与位置均可选择 – 减小对套管的磨损
Schlumberger Private
18
PowerDrive Xceed应用实例
60.00
50.00
0 0
马达1井 马达2井
56.31
44.49米 提高98% 22.46米
25.25 17.53 33.52
49.74
2
4
6
8
10
钻速,米/小时
40.00 30.00 20.00
28.53
23.08
10
PowerDrive X5/X6 MTBF(可靠性指标)
3,000 2,500
Schlumberger Private
2,000
1,500 1,000 500
0 2004 2005 2006 2007 2008 2009 2010
11
Schlumberger Private
PowerDrive X6
1650
45
45
TJH-21 Cont (85) Mala H-5 Cont (1225) Mala H-5 Cont (85)
40 1150
40 1450
1500
1550 Depth (m)
1600
1200
1250 Depth (m)
1300
1350
6
旋转导向系统使定向钻井变得更容易
大斜度井 水平井 大位移井 超深油藏井 长水平段井 三维绕障井 多分枝 / 鱼骨刺井
PowerDrive X5 PD
GR/Res 9 m
X5
D&I / GR 2.50m
250 200 150 100
P lan
TeleScope
EcoScope D&I 20.40m
Motor
GR/Res 12.80m
50 0
A ctual
Schlumberger Private
12 1/4" Section
45
90 80 70
Schlumberger Private
40 35 30 25 20 15 10
ROP (m/h)/WOB (Klbs)
WOB
60
RPM/Icn (Deg)
50 40 30 20 10 0
Depth (m)
ROP Torque Inc Surface RPM WOB 40 per. Mov. Avg. (ROP) 40 per. Mov. Avg. (WOB)
2000
4.00 2.00
2.47
3.47
2500
0.00
平均作业周期
平均日进尺/100
19
PowerDrive Xceed世界纪录
Drilled in the Al Shaheen Field offshore Qatar, broke the previous record length by 2,000 ft, reaching a total depth of 40,320 ft and total step-out distance of 35,770 ft from the surface location PowerDrive X5 technology was used in 16”& 12 ¼” sections as well as in the first 18,579ft of the 8 ½” hole section. The 35,449 ft 8 ½” hole section was drilled in two bit runs, the latter of which contained PowerDrive Xceed675, geoVISION675, TeleScope and adnVISION675 tools.
自动巡航调整井眼轨迹,尤其在稳斜模式 时,不需要人工干预,井斜不超过± 0.5度
设计轨迹
实际轨迹
15
Schlumberger Private
PowerDrive Xceed
16
PowerDrive Xceed
所有内部外部全部旋转; 外部没有固定部分
Schlumberger Private
Schlumberger Private
斯伦贝谢新型旋转导向系统
2
导向马达遇到的较典型的难点
顶部接头
动力部分 传动部分 可调弯角
Schlumberger Private
轴承部分 驱动轴
3
钻压传递困难实例
TH-11 Drilling Parameter
100
1 2 1/4" Hole
50
Angle
27
总结与展望
斯伦贝谢旋转导向是业界唯一的全程全部等速旋转的导向系统。 旋转导向系统能够克服常规泥浆马达遭遇的各种难题,优化钻井
Schlumberger Private
作业,提高钻井效率,帮助最大化油藏钻遇率,有效地为客户带 来经济效益最大化。
斯伦贝谢公司希望与客户加强前期合作,以便更好地发挥旋转导
外表看起来像一根马达 本体上有 个扶正器
钻头、扶正器组成造斜 三点接触
17
PowerDrive Xceed工作原理
所有部件全旋转,优化井 眼状况 近钻头井斜 方位测量,更 好保证井眼轨迹的准确度 井眼轨迹光滑 ,完井管柱 入井易 造斜率稳定 适 合 于高研磨或具有挑战 的环境 自动巡航模式
22
PowerDrive vorteX的应用实例
Schlumberger Private
23
PowerDririvate
24
PowerDrive vorteX的应用实例
PowerDrive vorteX应用于6”井眼 减小了套管磨损,7”套管下到着陆点 钻进时,工具面非常稳定 机械钻速提高了25%
斯伦贝谢钻井新技术
Schlumberger Private
张红永 钻井工程师 — 钻井与测量部 2011年8月18日
内容
常规定向钻井技术面临的难点 旋转导向系统的优势
斯伦贝谢旋转导向系统
– PowerDrive X6 – PowerDrive Xceed – PowerDrive vorteX
TeleScope EcoScope
滑动钻进中不能获取成像资料
Motor
GR/Res 12.80m D&I 20.40m
测量点距离钻头很远
5
为什么选择旋转导向系统
Drilled Footage Per Day Comparison
300
Footage/day (m/day)
TeleScope
EcoScope
55
TJH-21 Cont (85) Mala H-5 Cont (1225)
55