机械原理课程设计
机械原理课程设计手册

机械原理课程设计手册一、课程目标知识目标:1. 理解并掌握机械基本原理,包括力与运动的相互关系、简单机械的构造及功能;2. 掌握并能够运用基本的机械制图方法,阅读并制作简单的机械图;3. 掌握机械设计的基本流程,能够运用相关知识对简单机械装置进行设计和分析。
技能目标:1. 能够运用物理学原理对机械系统进行简单的受力分析;2. 能够运用制图软件或手工绘制基本的机械图纸,展示清晰的机械结构;3. 能够运用小组合作的方式,进行机械设计项目的讨论与实施。
情感态度价值观目标:1. 培养学生对于机械工程学科的兴趣,激发学习动力;2. 增强学生的团队协作意识,提高沟通协调能力;3. 培养学生严谨的科学态度和问题解决能力,形成积极的探究精神。
课程性质分析:本课程为机械原理的入门课程,旨在帮助学生建立对机械系统的基本认识,学会基本的制图与设计方法,同时结合实际操作,增强学生的实践能力。
学生特点分析:考虑到学生所在年级,具备一定的物理知识基础和空间想象能力,但可能缺乏实际动手操作经验,因此课程设计需兼顾理论讲解与实践操作。
教学要求:1. 确保学生掌握机械原理的基本理论知识;2. 通过案例分析和实际操作,提升学生的技能应用能力;3. 培养学生积极的情感态度,形成良好的价值观。
二、教学内容1. 引言:介绍机械原理的基本概念,机械系统的组成及分类。
- 教材章节:第一章 机械原理概述2. 力与运动:讲解力的作用效果、运动状态及受力分析。
- 教材章节:第二章 力与运动3. 简单机械:介绍杠杆、轮轴、斜面等简单机械的原理与应用。
- 教材章节:第三章 简单机械4. 机械制图:教授制图的基本知识,包括视图、剖面图、尺寸标注等。
- 教材章节:第四章 机械制图5. 机械设计:阐述机械设计的基本流程,包括需求分析、方案设计、详细设计等。
- 教材章节:第五章 机械设计6. 实践操作:组织学生进行简单机械装置的设计、制作与测试。
- 教材章节:第六章 实践操作教学内容安排与进度:1. 引言(1课时)2. 力与运动(2课时)3. 简单机械(2课时)4. 机械制图(3课时)5. 机械设计(3课时)6. 实践操作(4课时,含小组讨论、制作、测试及评价)三、教学方法1. 讲授法:- 对于机械原理的基本概念、力学原理等理论性较强的内容,采用讲授法进行教学,确保学生能够系统地掌握相关知识。
机械原理课程设计_课程设计教案

动图解法绘制机构给定位置的速度和加速度多边形;
3)选取位移比例尺μl、速度比例尺μv、加速度比例尺 μa和转角比例尺μφ(时间比例尺μt),绘制滑块5的位移 线图s-φ(t)、速度线图V-φ(t)和加速度线图a-φ(t);
4)整理设计计算说明书:内容包括:原始数据和设 计要求。将机构一个运动循环中的下列各个运动参数填 入表中,并以机构的某一位置为例,说明采用相对运动 图解法求机构的速度和加速度的过程。
《机械原理课程设计》
目的:
在于进一步巩固和加深所学到的理论知识,培养 独立解决实际问题和机械系统运动方案创新设计的能 力,使学生对机构的运动学和动力学分析和设计有一 个较为完整的概念,并进一步提高其计算、制图和使 用技术资料的能力。
要求:
用1号图纸一张和2号图纸一张绘制设计图。图纸 绘制过程中必须严格按照机械制图国家标准的要求进 行绘制,最后整理出设计计算说明书一份。全部的课 程设计应在一周内完成。
q
k
mm mm mm mm mm mm mm mm
n r/min
6、设计计算步骤 1)选取机构比例尺μl、按照数据表中给定的有关参数
绘制机构运动简图。将曲柄圆周分成6等份,作为曲柄的 6个位置,其作法为:取曲柄OA与连杆AB共线时所对应 的位置作为起始位置,曲柄按照顺时针方向依次标出A1、 A2、A3、A4、A5、A6 6个位置。再根据曲柄位置画出机构 的六个位置简图;
1、方法:矢量方程图解法(相对运动图解法)。
矢量方程图解法?
同一构件上两点之间的速度关系 3 C
B
VC=VB+VCB
2
A
大小: ? 方向: √
√? √ ⊥CB 1
机械原理课程设计20篇
第13章 机械原理课程设计题目汇编近几年来,随着机械原理课程教学改革的不断深入,机械原理课程设计的重点应放在机械系统运动方案的构思和设计上,以激发和培养学生的创新意识和创新设计能力,这已成为共识。
本书从这一认识出发,并根据《机械原理课程教学基本要求》中对机械原理课程设计提出的要求,汇编了二十个课程设计题目,供教师选用和参考。
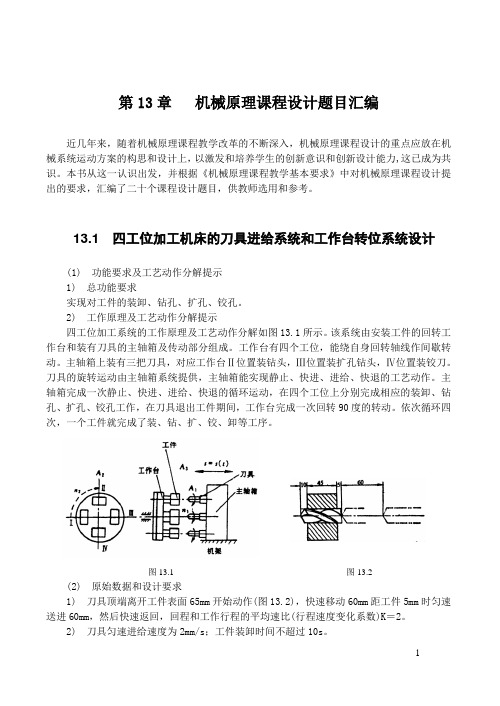
13.1 四工位加工机床的刀具进给系统和工作台转位系统设计(1) 功能要求及工艺动作分解提示 1) 总功能要求实现对工件的装卸、钻孔、扩孔、铰孔。
2) 工作原理及工艺动作分解提示四工位加工系统的工作原理及工艺动作分解如图13.1所示。
该系统由安装工件的回转工作台和装有刀具的主轴箱及传动部分组成。
工作台有四个工位,能绕自身回转轴线作间歇转动。
主轴箱上装有三把刀具,对应工作台Ⅱ位置装钻头,Ⅲ位置装扩孔钻头,Ⅳ位置装铰刀。
刀具的旋转运动由主轴箱系统提供,主轴箱能实现静止、快进、进给、快退的工艺动作。
主轴箱完成一次静止、快进、进给、快退的循环运动,在四个工位上分别完成相应的装卸、钻孔、扩孔、铰孔工作,在刀具退出工件期间,工作台完成一次回转90度的转动。
依次循环四次,一个工件就完成了装、钻、扩、铰、卸等工序。
(2) 原始数据和设计要求1) 刀具顶端离开工件表面65mm 开始动作(图13.2),快速移动60mm 距工件5mm 时匀速送进60mm ,然后快速返回,回程和工作行程的平均速比(行程速度变化系数)K =2。
2) 刀具匀速进给速度为2mm/s ;工件装卸时间不超过10s 。
图13.1 图13.23) 生产率为每小时约74件。
(3) 运动方案构思提示1) 工作台的间歇转动可采用槽轮机构、不完全齿轮机构,曲柄摇杆棘轮机构、蜗杆凸轮间歇机构、圆柱凸轮间歇机构等。
2) 主轴箱的移动可采用移动推杆圆柱凸轮机构、移动推杆盘形凸轮机构、摆动推杆盘形凸轮与摇杆滑块机构、曲柄滑块机构、带滑块的六杆机构等。
2023年机械原理课程设计书
2023年机械原理课程设计书篇一:机械原理课程设计教学大纲注:课程类别:公共基础课、专业基础课、专业必修课、专业选修课、集中实践环节、实验课、公共选修课填表说明:1. 每项页面大小可自行添减,一节或一次课写一份上述格式教案。
2. 课次为授课次序,填1、2、3……等。
3. 授课方式填理论课、实验课、讨论课、习题课等。
4. 方法及手段如:举例讲解、多媒体讲解、模型讲解、实物讲解、挂图讲解、音像讲解等。
教学内容:绪论0.1 机械原理的研究对象研究对象是机械,机械是机器和机构的总称。
一、机器机器的概念多少年来已在人们的头脑中形成并不断发展。
机器的种类繁多,构造、性能、用途各不同,但有三个共同的特征:①人为的实物组合(不是天然形成的);②各运动单元间具有确定的相对运动;③能完成有用的机械功或转换机械能。
机器是执行机械运动的装置,用来完成有用的机械功或转换机械能。
凡用来完成有用功的称工作机,凡将其他形式的能量转换成机械能的称原动机。
二、机构能实现预期的机械运动的各构件(包括机架)的基本组合体。
具有①②两特征。
很显然,机器和机构最明显的区别是:机器能作有用功或转换机械能,而机构不能,机构仅能实现预期的机械运动。
两者之间也有联系,机器是由若干个机构组成的系统,最简单的机器只有一个机构。
三、基本概念构件:运动单元体零件:制造单元体构件可由一个或若干个零件刚性连接而成。
机架:机构中相对不动的构件原动件:驱动力(或力矩)所作用的构件。
→输入构件从动件:随着原动构件的运动而运动的构件。
→其中输出预期运动的称输出构件0.2 机械原理课程的内容及在培养人才中地位、任务和作用一、研究内容1、机构的结构学:①机构运动的可能性和确定性;②机构的组成原理;1、机构的运动学:从几何观点分析机构的运动规律,按已知规律设计新机构。
2、机构和机器的动力学:①机构各构件的力分析、惯性力的平衡;②确定机械效率、已知力作用下机械的真实运动规律;③作用力、构件质量和构件运动之间的关系,即机械的运转和调速问题。
机械原理课程设计任务书

编写设计说明书:详细描述设 计思路、设计方案、设计过程 等
准备答辩:准备答辩PPT,熟 悉设计内容,准备答辩问题
完成设计说明书:提交设计说 明书,等待老师审核
参加答辩:参加答辩,回答老 师提出的问题,展示设计成果
第四周:答辩,修改完善设计
答辩时间:第四周
答辩地点:学校报告厅
答辩内容:介绍设计思路、 设计方案、设计成果等
感谢观看
汇报人:
设计过程中必须考虑产品的可维护 性和可升级性
设计过程中必须考虑产品的使用寿 命和耐久性
保证装置的稳定性和可靠性
设计过程中要考虑到各种可能的环境因素,如温度、湿度、振动等
选用合适的材料和工艺,保证装置的强度和刚度
设计合理的结构,避免应力集中和疲劳破坏 采用可靠的连接方式,如螺栓、焊接等,保证装置的稳定性和可靠 性
成果展示:展示 设计成果,包括 图纸、模型、实 验数据等
问题分析:分析 设计中遇到的问 题和解决方案, 以及改进措施等
回答老师提出的问题和意见
认真听取老师的问题和意见,保持谦虚的态度 回答问题时,要清晰、准确、有条理 对于老师的意见,要虚心接受,并提出改进措施 保持良好的沟通和互动,展现出自己的专业素养和团队精神
提高团队协作和沟通能力
团队协作:通 过团队合作, 提高解决问题
的能力
沟通能力:通 过团队沟通, 提高表达和倾
听的能力
领导能力:通 过团队领导, 提高组织和协
调的能力
创新能力:通 过团队创新, 提高解决问题 的能力和创新
能力
02
课程设计任务
设计一个简单的机械装置
确定机械装置的功能和用途 选择合适的材料和工具 设计机械装置的草图和结构 制作机械装置的零件和组件 组装机械装置并进行测试 修改和完善机械装置,使其满足设计要求
机械原理课程设计任务

经验总结
分享团队成员在课程设计中的经 验和教训。
实际应用
解释为何这个问题在现实生活中很重要。
设计目标
设计和开发
性能优化
确定要设计和开发的物品或系统。 阐述优化性能的具体目标。
可持续性
说明设计在环境可持续性方面的 考虑。
设计方案
1
研究和分析
开展研究,分析设计要求和约束。
概念设计
2
生成多个概念设计,并进行评估和选择。
3
详细设计
制定详细设计并创建相应的图纸和模型。
机械原理课程设计任务
本课程设计任务旨在帮助学生加深对机械原理的理解,并培养解决实际问题 的能力。
课程设计任务简介
背景
解释为何机械原理课程设计是必 要的。
团队合作
讨论小组沟通和协作的重要性。
学习工具
介绍学生在课程设计中将使用的 工具。
问题陈述
挑战性问题
提出一个挑战性的机械原理问题。
解答方法
概述解决这个问题的方法和技巧。
相关设计要素
1 材料选择
2 结构设计
选择适合设计需
解释如何控制设计中的运 动。
性能测试计划
测试目标
明确测试的目标和指标。
测试方法
阐述测试所需的步骤和方法。
数据分析
解释如何分析测试数据以评估 设计性能。
结论
团队成果
展示团队完成设计任务的成果。
证书颁发
机械原理课程设计pdf陈明
机械原理课程设计pdf 陈明一、课程目标知识目标:1. 理解并掌握机械基本原理,包括力的作用、简单机械的构成和功能;2. 掌握机械效率的计算方法,并能应用于实际问题;3. 掌握机械运动的基本类型,及其在实际中的应用。
技能目标:1. 能够运用所学知识分析并解决简单的机械问题;2. 能够设计简单的机械装置,并进行效率评估;3. 能够通过实际操作,验证机械原理的相关理论知识。
情感态度价值观目标:1. 培养学生对机械原理学习的兴趣,激发其探究欲望;2. 培养学生的团队合作意识,使其在合作解决问题中体验到学习的快乐;3. 培养学生尊重科学、严谨求实的态度,形成正确的价值观。
课程性质:本课程为初中物理机械原理部分,结合学生年级特点,注重理论知识与实际应用相结合,强调动手实践和合作探究。
学生特点:初中生正处于形象思维向抽象思维过渡的阶段,对机械原理有一定的好奇心,但需要具体实例和实践活动来辅助理解。
教学要求:教师应采用多元化的教学方法,如案例分析、小组讨论、实验操作等,引导学生主动参与,提高学生的实践能力和创新能力。
通过分解课程目标为具体的学习成果,使学生在课程结束后能够达到预期的教学效果,为后续学习打下坚实基础。
二、教学内容1. 简单机械原理:包括杠杆、滑轮、轮轴等基本类型及其应用;- 教材章节:第三章第三节《简单机械的应用》2. 机械效率的计算与评估:介绍机械效率的定义、计算方法及其在实际机械中的应用;- 教材章节:第三章第四节《机械效率的计算》3. 机械运动类型:平移、旋转等基本运动类型及其在生活中的应用实例;- 教材章节:第三章第五节《机械运动类型及其应用》4. 实践活动:设计并制作简单的机械装置,进行效率测试;- 教材章节:第三章实践活动《制作一个简单机械装置》教学大纲安排:第一课时:简单机械原理的学习与应用;第二课时:机械效率的计算与评估;第三课时:机械运动类型及其在实际中的应用;第四课时:实践活动,设计制作简单机械装置并进行效率测试。
机械原理matlab课程设计
机械原理matlab课程设计一、教学目标本课程的学习目标主要包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握机械原理的基本概念、理论和方法;技能目标要求学生能够运用MATLAB软件进行机械系统仿真和分析;情感态度价值观目标要求学生培养创新意识、团队合作精神和自主学习能力。
通过本课程的学习,学生将能够:1.描述和解释机械原理的基本概念和理论。
2.使用MATLAB软件进行机械系统仿真和分析。
3.提出问题、解决问题并开展创新设计。
4.能够进行团队合作,共同完成项目任务。
二、教学内容教学内容将根据课程目标进行选择和,确保内容的科学性和系统性。
教学大纲将明确教学内容的安排和进度,指出教材的章节和列举内容。
主要内容包括:1.机械原理的基本概念和理论,包括力学、动力学、运动学等方面。
2.MATLAB软件的基本操作和功能,包括矩阵运算、绘图、编程等。
3.机械系统仿真的方法和技巧,包括模型建立、参数调整、结果分析等。
4.机械系统设计案例分析,包括机器人的运动控制、机构的优化设计等。
三、教学方法为了激发学生的学习兴趣和主动性,将采用多种教学方法。
包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过教师的讲解和演示,向学生传授基本概念和理论知识。
2.讨论法:学生进行小组讨论,促进学生之间的交流和思维碰撞。
3.案例分析法:通过分析实际案例,引导学生运用所学知识解决实际问题。
4.实验法:安排实验课程,让学生亲自动手进行实验操作和数据分析。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备适当的教学资源。
包括教材、参考书、多媒体资料和实验设备等。
1.教材:选择权威、实用的教材,作为学生学习的主要参考资料。
2.参考书:推荐一些相关的参考书籍,供学生深入学习和拓展知识。
3.多媒体资料:制作精美的PPT、教学视频等多媒体资料,增强课堂教学的趣味性和效果。
4.实验设备:准备必要的实验设备,让学生能够进行实际操作和验证。
机械原理课程设计教案
机械原理课程设计教案一、课程目标1.理解和掌握机械原理的基本概念、原理和方法;2.能够运用所学知识进行机械运动方案的设计和分析;3.培养学生的创新思维和解决实际问题的能力。
二、课程内容和要求1.机械运动方案设计(1)机构选型与组合:根据给定机械的工作要求,合理地进行机构的选型与组合;(2)运动方案拟定:拟定多个机械系统的运动方案,进行对比和选择,最后选定一个最佳方案;(3)机构运动分析:对选定方案中的机构进行运动分析,包括速度、加速度、位移等;(4)机构力分析:对选定方案中的机构进行力分析,包括静力分析和动力分析;(5)机构优化设计:根据分析结果,对机构进行优化设计,提高机械的性能和效率。
2.机械原理课程设计说明书编写(1)封面:包括课程名称、设计题目、班级、姓名、学号、日期等信息;(2)目录:列出设计说明书的主要内容及其页码;(3)前言:简要介绍设计的目的、意义和主要内容;(4)概述:包括课程设计任务书、原始数据及设计要求等内容;(5)设计说明书正文:按照设计过程的顺序,依次介绍机构选型与组合、运动方案拟定、机构运动分析、机构力分析、机构优化设计等内容;(6)结论:总结设计的主要成果和创新点,提出改进意见和展望;(7)参考文献:列出设计中参考的文献资料。
三、教学方法和手段1.理论教学:通过课堂讲解、案例分析等方式,让学生理解和掌握机械原理的基本概念、原理和方法。
2.实践教学:通过机械原理课程设计,让学生在实践中运用所学知识进行机械运动方案的设计和分析,培养学生的创新思维和解决实际问题的能力。
3.辅助教学:利用多媒体课件、教学视频等辅助教学工具,提高教学效果。
四、课程考核和评价1.课程设计成果:根据设计说明书的内容和质量,评价学生的设计能力和创新能力;2.课堂表现:根据学生的课堂参与度、提问和回答问题的质量等,评价学生的学习态度和学习能力;3.平时作业:根据作业的完成情况,评价学生的知识掌握情况和学习习惯。
机械原理课程设计说明书
机械原理课程设计说明书一、设计目的。
本课程设计旨在通过对机械原理相关知识的学习和实践,培养学生分析和解决机械工程中实际问题的能力,提高学生的动手能力和创新意识,为将来的工程实践打下坚实的基础。
二、设计内容。
1. 课程设计主题,设计一个简单的机械装置,通过该装置实现特定的功能。
2. 设计要求,装置的设计要求符合机械原理相关知识,能够有效地完成所规定的功能,并且具有一定的创新性和实用性。
3. 设计步骤,包括需求分析、方案设计、零部件选型、装配调试等具体步骤。
4. 设计报告,撰写完整的课程设计报告,包括设计思路、设计过程、关键技术参数、实验结果和分析等内容。
三、设计流程。
1. 需求分析,明确设计的功能和性能要求,分析设计对象的特点和工作环境,为后续的方案设计奠定基础。
2. 方案设计,根据需求分析的结果,提出多种设计方案,并进行比较和评估,选择最合适的方案进行详细设计。
3. 零部件选型,根据所选方案,选择合适的零部件和材料,确保装置的稳定性和可靠性。
4. 装配调试,按照设计要求,将各个零部件进行装配,并进行调试和优化,确保装置能够正常工作。
5. 设计报告,撰写完整的设计报告,包括设计的整个过程和结果,以及对实验数据的分析和总结。
四、设计要求。
1. 设计的装置功能明确,能够有效地完成所规定的任务。
2. 设计具有一定的创新性和实用性,能够解决实际的工程问题。
3. 设计报告内容完整,结构清晰,语言流畅,符合学术规范。
4. 设计过程中要注重安全性和可靠性,确保实验过程中不会造成人身和设备的损害。
五、设计评分标准。
1. 设计方案的创新性和实用性占20%。
2. 设计装置的功能和性能占30%。
3. 设计报告的完整性和规范性占30%。
4. 设计过程中的安全性和可靠性占20%。
六、总结。
通过本次课程设计,学生将能够全面掌握机械原理相关知识,培养了动手能力和创新意识,为将来的工程实践打下了坚实的基础。
同时也提高了学生的团队合作能力和实际问题解决能力,为将来的工作做好了充分的准备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课程设计设计说明书设计题目步进输送机机械工程学院(系) 机械设计制造及其自动化专业汽车院(系) 车辆工程专业设计人:091815 何知杰09 马子健09 王昊09 朱超指导教师:刘榕完成日期:2011 年5 月目录1)设计题目与工作原理2)原始数据及设计要求3)机构工作循环图4)机器的设计计算5)主运动的运动分析6)设计结果、附图与相关程序7)参考文献8)设计心得体会设计题目与工作原理一、题目:设计步进输送机二、工作原理及工艺动作简述:步进输送机是一种间歇输送工件的传送机械,如下简图所示,工件由料仓卸落到辊道上,滑架作往复的直线运动。
滑架正行程时,通过棘钩推动工件向前运动;滑架返回时,棘钩被压下,棘钩从工件下面滑过,工件不动。
当滑架又向前运动时,棘钩又钩住下一工件向前运动,从而实现工件的步进传送。
插板作带停歇的往复运动,可使工件保持一定时间的间隔卸落到辊道上。
三、工艺动作分解:(1)下料:在插板打开时,工件作自由落体运动,落到辊道上。
(2)插断机构:插板作带停歇的往复直线运动,从而控制工件一个一个有序地掉落至辊道上。
(3)步进输送机构:滑板作带急回的往复的直线运动,滑架正行程时,棘钩推动工件运动,且每一次正行程时沿滑架均匀分布的棘钩同时推动此次工件与此前工件同时运动,从而实现步进输送。
原始数据与设计要求一、原始数据及设计要求1、输送工件形状和尺寸如图所示。
2、输送步长H=845mm,滑架工作行程平均速度为0.42m/s,要求保证输送速度尽可能均匀,行程速比系数K=1.65。
3、滑架导轨水平线至安装平面的高度在1100mm以下。
4、电动机功率可选用1.1kW,1400r/min左右(如,Y90S-4)。
二、注意事项及难点提示1、本机主运动机构是作往复直线运动的步进输送机构,其执行构件时随滑块架作往复的推抓(推抓可被轨道上的工件压下或由弹簧顶起复位)。
辅助运动系统是插断机构,其执行构件是插板。
两者的协调运动关系是:起始点位置上的工件被输送机构的推抓推出后,即可开启插板放下一个新工件;当输送机构的推抓返回原位准备再推进式,新工件早已在起始点就位,且插板也早已关闭,为保证推抓再推动工件前保持推程状态,输送机构的行程应大于工件输送步长20mm左右。
机械工作循环图应据此协调关系设计,并自行确定若干需要的协调运动参数。
2、步进输送机构与插断机构的主要设计参数有些已给定,有些需要计算或自行确定。
机构工作循环图一、系统工作状态分析过程一(t=0~t1)滑架从起点开始到达正行程终点(行程全长865mm),工件2夹紧,工件1沿带滑动到指定位置状态1(t=t1)滑架开始急回运动,工件1停止在当前位置(在本次循环中不再运动,等待下一次推程)过程2(t=t1~t2)滑架从正行程终点返回,工件2准备放松状态2(t=t2)滑架急回运动结束,凸轮临近工作点过程3(t=t2~t3)滑架在起点附近缓慢移动,凸轮进入工作点,工件2放松落入滑架,工件3夹紧状态3(t=t3)滑架即将开始新一轮急回运动,工件2开始滑动,工件3夹紧二、机构圆周式运动循环图设计计算及说明设计内容计算及说明结果与结论一、原动机的选定1、电动机类型2、运动参数二、主运动机构的设计1、循环周期T2、滑架正行程耗时t13、滑架回程耗时t24、曲柄角速度错误!未找到引用源。
5、极位夹角错误!未找到引用源。
6、摆杆长度L BD7、安装尺寸h、H0、H AB8、曲柄长度L AC根据题目要求,选择Y90S-4型电动机,其额定功率为1.1kW,满载转速为1400r/min。
已知输送步长H=845mm,而根据运动协调关系,滑架行程应比H多20mm,故滑架行程H’=865mm。
平均速度错误!未找到引用源。
=0.42m/s,行程速比系数K=1.65。
设一个循环的周期为T,滑架正行程耗时t1,滑架回程耗时t2,故:220.8654.1190.42HT sv⨯===又错误!未找到引用源。
故:12.565t s≈21.554t s≈曲柄角速度21.525/rad sTπω=≈错误!未找到引用源。
错误!未找到引用源。
P=1.1kWn0=1400r/mi4.119T s=12.565t s≈21.554t s≈1.525/rad sω≈44.1509θ=三、传动系统设计1、减速箱的设计如图所示,∠ABD=θ/2摆杆BD长度L BD=H’/(2*sin(θ/2)≈1250mm,故取h=1300mm。
取H A=500mm,取H D=1400mm。
则曲柄长L AC=H A错误!未找到引用源。
*sin(θ/2)≈187mm。
至此,主运动机构尺寸已完全定下。
传动系统的目的是获得主机构和辅助机构的原动件要求的转速,上面已经算出主动曲柄所需角速度,为获得此角速度,采用联轴器与减速箱串联进行减速,如下图所示:四、辅助机构的设计1、凸轮的设计2N:输入转速,1N:输出转速;2161140096.514.5NiN===;1612345696.5i i i i∴=⋅⋅=;设1Z的齿数为21,则设计2Z=79;2121793.7621ZiZ===。
设3Z为21,443434.61921Z ZiZ===;497Z∴=。
设520Z=,则1656123496.55.5563.764.619iii i===⋅⨯;65651115.556 5.5520ZiZ====;6111Z∴=。
至此,传动系统设计已经全部完成。
凸轮 1.534/rad sω=,设计为300()mm d;由工件高度得,工作0.08h m=;总传动比1696.5i=1Z=212Z=793Z=214Z=97520Z=6Z=111料仓宽度280mm下落时间为220.080.1279.8h t s g ⨯===;凸轮周期22 4.091.534T s ππω===,0.127360360114.09t T θ∴==⨯≈ 。
凸轮内凹11可满足条件。
1. 凸轮的基圆直径为300mm2. 滚子直径为10mm3. 远休角为3494. 近休角为75. 推程与回程转角均为26. 推杆行程10mm至此,辅助机构设计已经完成。
工件下落高度80mm凸轮的基圆直径为300mm滚子直径为10mm远休角为349近休角为7推程与回程转角均为2推杆行程10mm设计数据及附图位移图速度图加速度图数据表格滑块位置计算步X4 Y41 399.067 1056.3510 ####### 1129.2220 -417.72 1049.1230 221.799 1107.2240 299.608 1088.7550 -208.99 1109.7160 -365.15 1068.5570 422.408 1047.2480 107.192 1124.1290 -372.22 1066.11100 ####### 1129.22 120 -107.19 1124.12 130 -422.41 1047.24 140 365.15 1068.55 150 208.991 1109.71 160 -299.61 1088.75 170 -221.8 1107.22 180 417.715 1049.12 190 ####### 1129.22 200 -417.72 1049.12 210 221.799 1107.22 220 299.608 1088.75 230 -208.99 1109.71 240 -365.15 1068.55 250 422.408 1047.24 260 107.192 1124.12 270 -372.22 1066.11 280 ####### 1129.22 290 372.217 1066.11 300 -107.19 1124.12 310 -422.41 1047.24 320 365.15 1068.55 330 208.991 1109.71 340 -299.61 1088.75 350 -221.8 1107.22 360 417.715 1049.12计算步Vx4 Vy4 合成1 -200.53 75.7572 214.366 10 -470.63 ####### 470.63 20 -121.57 -48.405 130.856 30 825.605 -165.39 842.008 40 -360.92 99.3192 374.333 50 -423.39 -79.737 430.833 60 422.457 144.364 446.443 70 96.0837 -38.756 103.605 80 -459.02 43.7701 461.098 90 -264.99 -92.517 280.676 100 1042.11 ####### 1042.11 110 -264.99 92.5171 280.676 120 -459.02 -43.77 461.098 130 96.0837 38.7558 103.605 140 422.457 -144.36 446.443 150 -423.39 79.7367 430.833 160 -360.92 -99.319 374.333 170 825.605 165.386 842.008 180 -121.57 48.4054 130.856 190 -470.63 ####### 470.63 200 -121.57 -48.405 130.856 210 825.605 -165.39 842.008 220 -360.92 99.3192 374.333 230 -423.39 -79.737 430.833 240 422.457 144.364 446.443 250 96.0837 -38.756 103.605 260 -459.02 43.7701 461.098 270 -264.99 -92.517 280.676 280 1042.11 ####### 1042.11 290 -264.99 92.5171 280.676 300 -459.02 -43.77 461.098 310 96.0837 38.7558 103.605 320 422.457 -144.36 446.443 330 -423.39 79.7367 430.833 340 -360.92 -99.319 374.333 350 825.605 165.386 842.008 360 -121.57 48.4054 130.856计算步ax4 ay4 合成1 -619.7 190.606 648.347 10 ####### -196.15 196.146 20 761.188 286.752 813.409 30 -1636.6 -312.48 1666.13 40 -338.09 -35.666 339.967 50 210.52 -127.62 246.181 60 1673.17 385.236 1716.94 70 -1163.3 458.983 1250.6 80 -101.68 -179.44 206.247 90 507.079 103.145 517.463 100 ####### -961.72 961.717 110 -507.08 103.145 517.463 120 101.684 -179.44 206.247 130 1163.33 458.983 1250.6 140 -1673.2 385.236 1716.94 150 -210.52 -127.62 246.181 160 338.091 -35.666 339.967 170 1636.56 -312.48 1666.13 180 -761.19 286.752 813.409 190 ####### -196.15 196.146 200 761.188 286.752 813.409 210 -1636.6 -312.48 1666.13 220 -338.09 -35.666 339.967 230 210.52 -127.62 246.181 240 1673.17 385.236 1716.94 250 -1163.3 458.983 1250.6 260 -101.68 -179.44 206.247 270 507.079 103.145 517.463 280 ####### -961.72 961.717 290 -507.08 103.145 517.463 300 101.684 -179.44 206.247 310 1163.33 458.983 1250.6 320 -1673.2 385.236 1716.94 330 -210.52 -127.62 246.181 340 338.091 -35.666 339.967 350 1636.56 -312.48 1666.13 360 -761.19 286.752 813.409机械运动方案的拟定一、 插段机构方案设计1、方案一:(1)工作原理:利用凸轮—连杆的组合机构,相当于曲柄长度可变的曲柄滑块机构,可实现预期的插板的间歇往复直线运动 (2)工作特点:只要适当地设计出凸轮的轮廓曲线,就可以使摆杆得到预期的运动规律,响应快速,机构简单紧凑。