相位噪声(PN9000)对抖动的换算
相位噪声单位
相位噪声单位
相位噪声单位(Phase Noise Unit)是指在一定频率下,检测频率(F0)处相位噪声的单位。
它由检测频率(F0)处相位噪声的分贝值和检测频率(F0)处被检信号的单位组成。
它是一个通用的测量单位,可以用来衡量任何频率处的相位噪声,而无需关注测量信号的频带单位[2]。
它是一种非常常见的无线电信
号处理测量单位。
此外,相位噪声单位也可用于对高精度时钟源的噪声分析,以确定频率跳变量,最大偏移和最小偏移等[3]。
相位噪声单位通常以
dBc/Hz的形式表示,其中c表示dB下降/Hz。
因此,“-100 dBc/Hz”表示检测频率处的振幅噪声为-100 dB,
即每1 Hz的频率偏移,其振幅噪声将下降100 dB。
根据公式,dBc/Hz = 10·log(P1/P2),其中P1和P2分别表示被测信号在检测频率(F0)处和检测频率(F0)处偏移1 Hz时的相位噪声。
详解抖动与相位噪音

详解抖动与相位噪音近年来,随着图像传输的普及,在骨干网络通信量的日益增加,以及高速大容量通信已经取得了很高的进步。
在这种情况下高速通信基础设施的高频率和稳定的输出的基准信号的需求十分强烈。
抖动(Jitter)是评估输出信号波形稳定性的指标之一。
英语的“Jitter”有神经过敏、紧张不安或激动的意思。
在表现高频石英振荡器的稳定度时,指传送数字信号时波形中产生的时间偏差和晃动。
本次说明有关抖动和相位噪音的基础知识。
抖动,通信设备的重要指标我们在使用示波器观察数字信号的波形的时候,有时可以发现本应以单一周期振荡的波形亮线很宽。
这种波形拉宽就是抖动。
图1 表示在一个周期单位中出现了几种周期的信号波形的情况。
理想波形以单一周期反复出现,但实际波形的一部分周期变短(红色)或变长(蓝色)。
抖动因读取电子信号元器件的极微小的不稳定或信号传输途中的不良影响等原因而产生。
抖动过大将造成相邻信号之间相互干扰,在传送影像和音乐信号时将导致影像质量和音质的劣化。
如上所述,抖动表示数字信号在时域上的晃动,但抖动的种类不限于一种。
抖动随时间而精微变化,对时间的变化模式也有多种多样,因此难以用一个参数来评价抖动。
抖动的分类·周期抖动(峰峰值):表示一周期中的偏差幅度(最大和最小之差)的抖动·标准差:表示偏差程度的标准偏差·随机抖动:自然产生的无法预测的抖动·确定性抖动:因电路、电磁感应或外界环境等因素而引起的抖动·累加抖动(长期抖动):时钟各周期的连续偏差。
做一个测试测试仪:为Wavecrest公司制造的“DTS-2075”测试仪测试条件:基本无噪音的电源、探针测试点为输出端、输出电阻设定为50ohm图2的横轴表示一个周期(皮秒),这次测试用直方图表示了50000次随机抽选的周期离差。
这是SG-8002CA 125MHz PCB的数据。
最理想的是在125MHz的一周期出现一个波峰,但由于各种因素致使特性出现变化。
晶振phase_noise_0.11度_概述说明以及解释

晶振phase noise 0.11度概述说明以及解释1. 引言1.1 概述晶振phase noise(相位噪声)是指晶体振荡器在输出信号中存在的随机相位偏移引起的频率偏差。
它是一个重要的性能指标,用于衡量晶振的稳定性和精确性。
Phase noise 的值通常以单位频率内的功率密度表示,单位为dBc/Hz(相对于载波功率)。
本文将着重介绍一种具有非常低phase noise 值的晶振,即0.11 度。
1.2 文章结构本文共分为五个主要部分。
首先,在引言部分,我们将介绍本文的概述和结构。
其次,在第二部分中,我们将详细定义和解释晶振phase noise,并探讨它对系统性能的影响,并介绍其测量方法与指标解释。
第三部分将探讨晶振phase noise 0.11度的特点和应用场景,包括其在通信领域中的应用情景以及其他领域可能需要低相位噪声晶振的应用示例。
在第四部分中,我们将研究目前晶振phase noise降低技术与方法方面的进展,包括常见的降噪技术和方法概述,新兴晶体材料在降低相位噪声方面的研究成果和前景展望,以及高性能和稳定性的PLL设计对相位噪声抑制的贡献。
最后,在结论部分,我们将对晶振phase noise 0.11度进行总结和归纳,并展望未来晶振相位噪声研究的方向。
1.3 目的本文旨在全面阐述晶振phase noise 0.11度的定义、特点与应用场景,并介绍降低phase noise 的技术与方法研究进展。
通过深入探讨晶振phase noise相关知识,读者可以更好地理解其重要性并了解到当前该领域的最新进展。
同时,文章也将为未来晶振相位噪声研究提供一些建议和展望。
2. 晶振phase noise 0.11度的定义与解释2.1 什么是晶振phase noise晶振(phase-locked loop,PLL) phase noise(相位噪声)是指当晶体振荡器工作在特定频率时,输出信号中存在的随机相位抖动。
基于相位噪声测试系统的频率稳定度测量方法
基于相位噪声测试系统的频率稳定度测量方法叶玲玲;石明华;沈小青;楼杨【摘要】介绍了基于相位噪声测试系统的时域频率稳定度测量原理和方法,主要解决传统测量时域短期频率稳定度的高附加相位噪声影响,提高了短期频率稳定度的测量精度,实现了低附加相住噪声的频率稳定度测量.【期刊名称】《中国科技信息》【年(卷),期】2011(000)012【总页数】1页(P150)【关键词】频率稳定度;测量;相位噪声【作者】叶玲玲;石明华;沈小青;楼杨【作者单位】中国卫星海上测控部,江苏江阴,214431;中国卫星海上测控部,江苏江阴,214431;中国卫星海上测控部,江苏江阴,214431;中国卫星海上测控部,江苏江阴,214431【正文语种】中文介绍了基于相位噪声测试系统的时域频率稳定度测量原理和方法,主要解决传统测量时域短期频率稳定度的高附加相位噪声影响,提高了短期频率稳定度的测量精度,实现了低附加相位噪声的频率稳定度测量。
频率稳定度;测量;相位噪声Frequency stab;ilityMeasurem;en tPhase Noise频率稳定度按观测域的不同,分为时域频率稳定度(简称频率稳定度)和频域频率稳定度(通称相位噪声)。
随着通信、雷达等高科技的发展,频率稳定度和相位噪声往往成为系统性能的限制性因素,成为整机系统、频率源、多种两端口频率控制和变换部件设计中必须认真考虑的性能指标。
在目前的相位噪声测试装置中,法国的PN9000相位噪声测试系统[1](下称PN9000)是其中的佼佼者。
本文主要探讨该系统在时域频率稳定度测量中的应用。
PN9000是模块化的测量系统,相关测量部件都以模块形式插在主机箱内。
根据参考源、频率范围和信号分析的需要,系统可进行不同的配置。
其基本系统由机箱、五个基本模块、电脑、IEEE接口、电脑主机箱内的数字转换板和测量软件组成。
频率稳定度指由于频率源内部噪声引起的频率取样值的随机起伏,是描述平均频率随机变化的量,平均时间即采样时间。
使用实时采样示波器测量相位噪声——
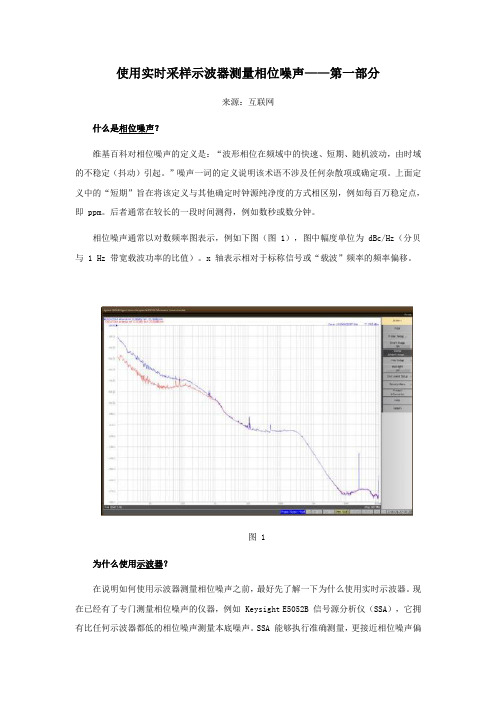
使用实时采样示波器测量相位噪声——第一部分来源:互联网什么是相位噪声?维基百科对相位噪声的定义是:“波形相位在频域中的快速、短期、随机波动,由时域的不稳定(抖动)引起。
”噪声一词的定义说明该术语不涉及任何杂散项或确定项。
上面定义中的“短期”旨在将该定义与其他确定时钟源纯净度的方式相区别,例如每百万稳定点,即 ppm。
后者通常在较长的一段时间测得,例如数秒或数分钟。
相位噪声通常以对数频率图表示,例如下图(图 1),图中幅度单位为 dBc/Hz(分贝与 1 Hz 带宽载波功率的比值)。
x 轴表示相对于标称信号或“载波”频率的频率偏移。
图 1为什么使用示波器?在说明如何使用示波器测量相位噪声之前,最好先了解一下为什么使用实时示波器。
现在已经有了专门测量相位噪声的仪器,例如 Keysight E5052B 信号源分析仪(SSA),它拥有比任何示波器都低的相位噪声测量本底噪声。
SSA 能够执行准确测量,更接近相位噪声偏移值,测量速度也比任何示波器都快。
但是该仪器也有一些测量限制,例如对最大频率偏移范围有所要求。
相位噪声分析仪的典型最大偏移为 100MHz。
对大于 100 MHz 的时钟频率,有时也要测量更高的频率偏移,但这超出了此类仪器的测量范围。
但示波器可以测量传递到数据信号上的相位噪声,而不仅仅测量时钟。
示波器使用简单如果也足以满足测量要求,当预算不足以购买专用的相位噪声测量设备时更是上佳选择。
相位提取示波器可以捕捉整个信号波形并对其进行数字化,有多种方法可以从数字化波形中提取相位噪声信息。
本文将简要介绍两种方法:1.时钟恢复2.通过矢量信号分析软件执行相位解调通过串行数据时钟恢复执行相位解调示波器分析信号是否达到设定的电压阈值,并将其与参考时钟边沿对比,从而测量串行数据或时钟信号的时序变化(抖动)。
对于相位噪声,我们希望参考时钟为理想的固定频率时钟。
大部分现代示波器都具有时钟恢复算法,可以从信号中提取时钟。
相位噪声和抖动是对同一种现象的两种不同的定量方式

相位噪声和抖动是对同一种现象的两种不同的定量方式。
在理想情况下,一个频率固定的完美的脉冲信号(以1 MHz为例)的持续时间应该恰好是1微秒,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是相位噪声,或者说抖动。
相位噪声是频率域的概念。
相位噪声是对信号时序变化的另一种测量方式,其结果在频率域内显示。
用一个振荡器信号来解释相位噪声。
如果没有相位噪声,那么振荡器的整个功率都应集中在频率f=fo处。
但相位噪声的出现将振荡器的一部分功率扩展到相邻的频率中去,产生了边带(sideband)。
从图2中可以看出,在离中心频率一定合理距离的偏移频率处,边带功率滚降到1/fm,fm是该频率偏离中心频率的差值。
相位噪声通常定义为在某一给定偏移频率处的dBc/Hz值,其中,dBc是以dB为单位的该频率处功率与总功率的比值。
一个振荡器在某一偏移频率处的相位噪声定义为在该频率处1Hz带宽内的信号功率与信号的总功率比值。
相位噪声产生的原因信号源热噪声,内部损耗电阻热噪声,混频器件电流散弹噪声及本振相位噪声,具体是温度过热关系。
相位噪声的定义定义1:相位噪声是指单位Hz的噪声密度与信号总功率之比,表现为载波相位的随机漂移,是评价频率源(振荡器)频谱纯度的重要指标源自: 有线数字电视传输特性与故障解析《中国有线电视》2005年赵雨境,王恒江定义2:相位噪声是指光的正弦振荡不稳定,时而出现某处相位的随机跳变.相位噪声导致光源线宽变宽.光强度噪声是指因自发辐射光强的随机变化和外界温度的变化,导致发射光强的起伏源自: Fabry-Perot干涉式光纤温度传... 《传感器技术》2001年曹满婷来源文章摘要:分析了温度对相位的调制作用以及Fabry -Perot干涉结构检测相位变化的原理,提出了一种具有高灵敏度和高分辨率的相位调制型全光纤结构,并进行了系统的噪声分析。
相位噪声指标

相位噪声指标一、相位噪声的定义与意义相位噪声是指信号的相位在时间上的波动程度,它是评价信号质量的重要指标。
在通信、雷达、导航等领域,相位噪声对系统的性能有着直接的影响。
衡量相位噪声的指标有相位噪声功率谱密度(PSD)和单边相位噪声功率谱密度(Sideband noise power spectral density)等。
二、相位噪声指标的分类与计算方法1.相位噪声功率谱密度(PSD):表示单位频率范围内,相位噪声能量的概率密度。
通常采用维纳过程模型来计算PSD。
2.单边相位噪声功率谱密度(Sideband noise power spectral density):表示在特定频率范围内,相位噪声引起的双边频谱的幅度平方和。
3.相位噪声参数:包括相位噪声功率谱密度和相位噪声指数等,这些参数根据不同的应用场景和设备要求进行选择和计算。
三、相位噪声指标在实际应用中的重要性1.在通信系统中,相位噪声会影响信号的解调性能,降低通信质量。
2.在雷达系统中,相位噪声会导致距离模糊和目标定位精度降低。
3.在导航系统中,相位噪声会增大定位误差,影响导航精度。
四、降低相位噪声的方法和技术1.采用低噪声器件:选择噪声性能优良的器件,如光纤、低噪声放大器等,降低系统的相位噪声。
2.优化系统设计:合理安排系统的结构和布局,减小噪声的传递和耦合。
3.数字信号处理:对信号进行数字滤波和降噪处理,提高信号质量。
4.锁定放大技术:通过锁定放大器对相位噪声进行抑制,提高信号的稳定性。
五、总结与展望相位噪声指标在通信、雷达、导航等领域具有重要作用。
随着技术的发展,对相位噪声指标的要求越来越高。
未来,降低相位噪声的技术和研究将不断涌现,为提升系统性能和可靠性提供支持。
相位噪声(PN9000)对抖动的换算
(2.4)
此处 JUI 是抖动用 UI 作单位。
Sφ
是相位波动的频谱密度和它能直觉地理解为
∆φ 2 BW = 1⋅
Hz
所以:
f2
f2
∫ ∫ ∆φ 2 = Sφ ( f ) ⋅ df = 2 ⋅ Lφ ( f ) ⋅ df
(2.5)
f1
f1
最后,抖动用(2. 6)式来计算
f2
2 ⋅ ∫ Lφ ( f ) ⋅ df
2. 用公式(1.3)计算动力定律的每一个 hα系数; 3. 用下面的表格公式计算各个积分的总和;
斜度 α <0 0 1 >1
∫f2
(
f1
hα fα
)df
[ ] hα
⋅1 1−α
⋅
f
1−α 2
− f11−α
h0 ⋅ ( f 2 − f1 )
h1
⋅
ln(
f2 f1
)
[ ] hα
⋅1 1−α
⋅
f
1−α 2
4
6.2 数字计算方法
积分的相位噪声计算是基于数字数据(Lφf)的建立。最简单的方法是采用“梯形方法 (Trapeziummethod)
∫x2
x1
f
(x) ⋅ dx
=
1 2
⋅ ∆x ⋅ [ f
(x2 ) +
f
( x1 )]
在我们的情况下
∫ ∑ [ ] f2
Lφ ( f ) ⋅ df
f1
=
1 max −1 2 i = min
− f11−α
4. 用公式(2.6)用 UI rms 为单位计算
3
6.1.1 例子
PN9000 计算结果
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2.1)
此处 :
A0 = 额定峰值电压
ε(t) = 与额定的振幅的偏差
f0
= 额定基频
∆φ(t) = 与额定的相位偏
ε(t)及φ(t)在理想上所有时间将为零。然而,振荡器不是理想的,由于饱和过程,ε (t)是几乎可忽略,公式(2.1)可写成:
V (t)
=
A0
⋅
sin
2⋅π T0
⋅ (t
+
∆φ 2⋅π
Sφ
是相位波动的频谱密度和它能直觉地理解为
∆φ 2 BW = 1⋅
Hz
所以:
f2
f2
∫ ∫ ∆φ 2 = Sφ ( f ) ⋅ df = 2 ⋅ Lφ ( f ) ⋅ df
(2.5)
f1
f1
最后,抖动用(2. 6)式来计算
f2
2 ⋅ ∫ Lφ ( f ) ⋅ df
JUI =
f1
2⋅π
(2.6)
现在主要的问题是在相位噪声测量的基础上来计算这积分式。
PN9000 计算结果 相位噪声
频率 Hz
斜率 α
4 3 2 1 0
fm [Hz]
1 10 1E3 10E3 1E6
Lm [dB]
-39 -73 -122 -131 -149
hα
1.259 E-4 5.012 E-5 6.310 E-7 7.940 E-10 1.259 E-15
由于 f0 = 70MHz 我们得到 :Jrms = 21.135 ps
2
5.归纳 :
抖动
随机零交叉
6. 积分的相位噪声计算
基本上有两个方法能用来计算 Lφ(f)的积分,这取决于现成的数据: • “图”解法 • 数字方法 6.1. “图”解法步骤: 1. 用直线近似地画出 Lφ(f)的曲线图;
2. 用公式(1.3)计算动力定律的每一个 hα系数; 3. 用下面的表格公式计算各个积分的总和;
相位噪声对抖动的换算
1. 引言 本文的目的是基于按相位噪声曲线对抖动的换算。
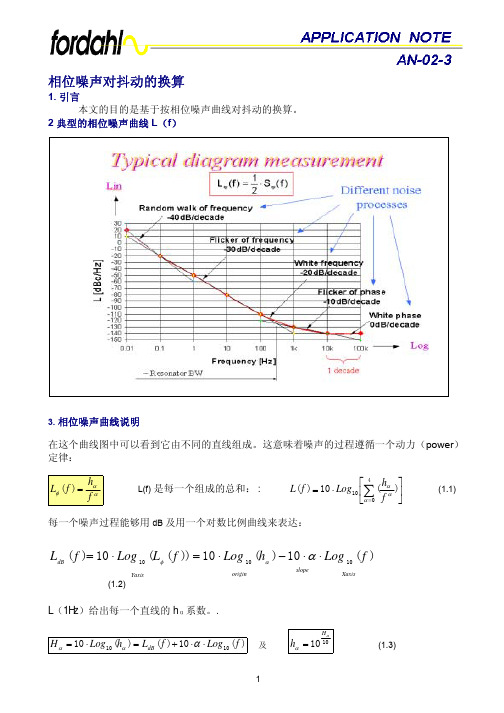
2 典型的相位噪声曲线 L(f)
3. 相位噪声曲线说明
在这个曲线图中可以看到它由不同的直线组成。这意味着噪声的过程遵循一个动力(power) 定律:
Lφ ( f ) =
hα fα
L(f) 是每一个组成的总和: :
∑ L (
f
斜度 α <0 0 1 >1
∫f2
(
f1
hα fα
)df
[ ] hα
⋅1 1−α
⋅
f
1−α 2
− f11−α
h0 ⋅ ( f 2 − f1 )
h1
⋅
ln(
f2 f1
)
[ ] hα
⋅1 1−α
⋅
f
1−α 2
− f11−α
4. 用公式(2.6)用 UI rms 为单位计算
3
6.1.1 例子
PN9000 计算结果
)
=
10
⋅
Log10
4 ( α =0
hα fα
)
(1.1)
每一个噪声过程能够用 dB 及用一个对数比例曲线来表达:
LdB
(
f
)=1
140
⋅4L4og2
104(L4φ (4f3))
=
110
4⋅ 4Lo2g
410 (4h3α
)
− 1{ 0 ⋅α
slope
⋅
1L4og210
(43f
)
Yaxis
origin
(t ⋅
) f
0
)
式中
T0
=
1 f0
(2.2)
Sin(x)函数在 x=2π时等于零,因此(2.2)式可消去成为:
t
=
T0
+
∆T
=
T0
⋅ (1 −
∆φ (t 2⋅π
)
)
(2.3)
抖动可描述为周期性的有关扰动:
J UI
=
∆T T0
=
∆φ (t) 2⋅π
(2.4)
此处 JUI 是抖动用 UI 作单位。
fmin [Hz]
1 3 80 800 660E3
fmax [Hz]
∫
Jitter [UI]
3 80 800 660E3 1E6
∑(∫ ) =
4.041 E-5 2.780 E-6 7.098 E-9 5.334 E-9 4.280 E-10
4.320E-5
1.688E-3
6.1..2 附注 1. 结果是接近 PN9000 相位噪声系统计算的结果。 2. 由于采用直线拟合曲线,其结果是比数字积分计算出的值往往要小一 些。 3. 把直线的数增加,为了近拟相位噪声曲线,使更精确。 4. 相位噪声曲线图通常在 100kHz 及 1MHz 之间呈现斜率为零。在这种情况对 SDH/SONT 计算的结果(例如在=12kHz 到 5 MHz 之间),推论超过 1 MHz 范围是可能的。
4
6.2 数字计算方法
积分的相位噪声计算是基于数字数据(Lφf)的建立。最简单的方法是采用“梯形方法 (Trapeziummethod)
∫x2
x1
f
(x) ⋅ dx
=
1 2
⋅ ∆x ⋅ [ f
(x2 ) +
f
( x1 )]
在我们的情况下
∫ ∑ [ ] f2
Lφ ( f ) ⋅ df
f1
=
1 max −1 2 i = min
PN9420-0
RF PHASE DETECTOR
PN9310-0
电池
Hale Waihona Puke BATT. BATT.VCO VCC GND
待测试的振荡器
BA电T池T.
VCO VCC GND
基准振荡器
6
7.1 方块图
待测输入
混频器
低噪声放大器
测量系统
基准
回路控制
7.2 注意
这相位噪声测量方法在所有的方法中是最灵敏的。
显示
7
⋅(
f i+1
−
fi ) ⋅
L( fi+1 ) + L( fi )
此处“min”及“max”对应在数据陈列中 f1 及 f2 的位置。
6.2.1. 例子
6.2.2 附注 在某些情况,曲线图显示出寄生振荡频谱线(如 50Hz 等)。这些曲线不予考虑。
5
7. PN900 测试系统
PN 9000
DC-1MHz
PHASE MEASUREME
SYSTE
PHASE
DC-40MHz 5MHz-1.7GHz
REM. ERR. MEAS. BATT. ON
p/8
F0
EXTERNAL
R.F.
p/8
NOISE DEMODTU. NE VOLTAGE INPUT
INPUT
±1Vp 1KW
20dBm Min 50 W
20dBm Max
AUX. MONITOR L.O.
OUTPUT
±10Vp 600W
OUTPUT
±20Vp 600 W
STD.BY LINE
OUTPUT
±2Vp 1KW
INPUT
0dBm Min 50W
STATUS PN9060-0
NOISE OUTPUT
PN9470-0
LOCK CONTROL
PN9450-0
LOW NOISE AMPLIFIER
Xaxis
(1.2)
L(1Hz)给出每一个直线的 hα系数。.
Hα
Hα = 10 ⋅ Log10 (hα ) = LdB ( f ) + 10 ⋅α ⋅ Log10 ( f ) 及
hα = 10 10
(1.3)
1
4. 抖动——相位噪声关系
一个正弦波输出信号能够用下述数字来表达:
V (t) = [ A0 + ε (t)]⋅ sin[2 ⋅π ⋅ f0 ⋅ t + ∆φ (t)]