航模遥控器S-BUS协议说明及解析
model_bus协议说明

Modbus通信协议摘要:工业控制已从单机控制走向集中监控、集散控制,如今已进入网络时代,工业控制器连网也为网络管理提供了方便。
Modbus就是工业控制器的网络协议中的一种。
关键词:Modbus协议;串行通信;RS-232C一、Modbus 协议简介Modbus 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。
它描述了一控制器请求访问其它设备的过程,如果回应来自其它设备的请求,以及怎样侦测错误并记录。
它制定了消息域格局和内容的公共格式。
当在一Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。
如果需要回应,控制器将生成反馈信息并用Modbus协议发出。
在其它网络上,包含了Modbus协议的消息转换为在此网络上使用的帧或包结构。
这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
1、在Modbus网络上转输标准的Modbus口是使用一RS-232C兼容串行接口,它定义了连接口的针脚、电缆、信号位、传输波特率、奇偶校验。
控制器能直接或经由Modem组网。
控制器通信使用主—从技术,即仅一设备(主设备)能初始化传输(查询)。
其它设备(从设备)根据主设备查询提供的数据作出相应反应。
典型的主设备:主机和可编程仪表。
典型的从设备:可编程控制器。
主设备可单独和从设备通信,也能以广播方式和所有从设备通信。
如果单独通信,从设备返回一消息作为回应,如果是以广播方式查询的,则不作任何回应。
Modbus协议建立了主设备查询的格式:设备(或广播)地址、功能代码、所有要发送的数据、一错误检测域。
从设备回应消息也由Modbus协议构成,包括确认要行动的域、任何要返回的数据、和一错误检测域。
航模电调数据转发器S.BUS2使用说明书
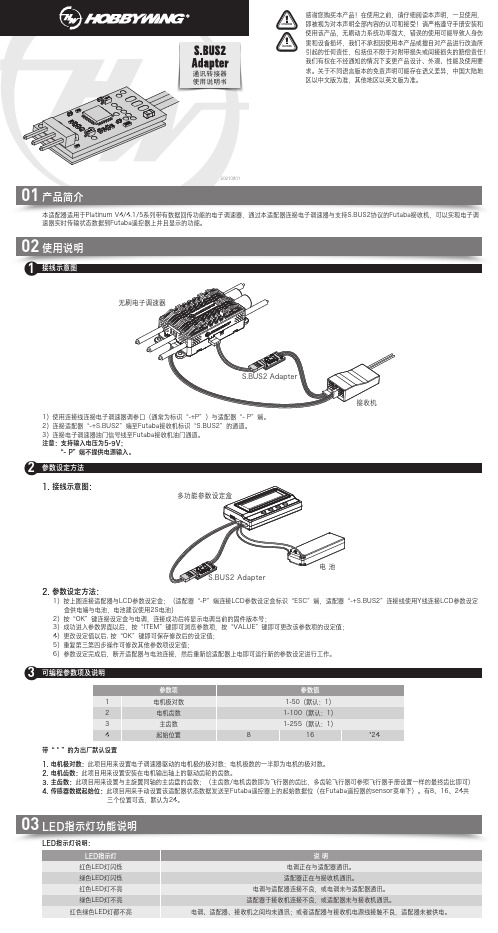
通讯转接器使用说明书接线示意图1参数设定方法2可编程参数项及说明3LED指示灯说明:1. 接线示意图:2. 参数设定方法:1)按上图连接适配器与LCD参数设定盒;(适配器“-P”端连接LCD参数设定盒标识“ESC”端,适配器“-+S.BUS2”连接线使用Y线连接LCD参数设定 盒供电端与电池,电池建议使用2S电池)2)按“OK”键连接设定盒与电调,连接成功后将显示电调当前的固件版本号;3)成功进入参数界面以后,按“ITEM”键即可浏览参数项,按“VALUE”键即可更改该参数项的设定值; 4)更改设定值以后, 按“OK”键即可保存修改后的设定值; 5)重复第三第四步操作可修改其他参数项设定值;6)参数设定完成后,断开适配器与电池连接,然后重新给适配器上电即可运行新的参数设定进行工作。
带“ * ”的为出厂默认设置1. 电机极对数:此项目用来设置电子调速器驱动的电机极的极对数;电机极数的一半即为电机的极对数。
2. 电机齿数:此项目用来设置安装在电机输出轴上的驱动齿轮的齿数。
3. 主齿数:此项目用来设置与主旋翼同轴的主齿盘的齿数;(主齿数/电机齿数即为飞行器的齿比,多齿轮飞行器可参照飞行器手册设置一样的最终齿比即可)4. 传感器数据起始位:此项目用来手动设置该适配器状态数据发送至Futaba遥控器上的起始数据位(在Futaba遥控器的sensor菜单下)。
有8、16、24共 三个位置可选,默认为24。
1)使用连接线连接电子调速器调参口(通常为标识“-+P”)与适配器“- P”端。
2)连接适配器“-+S.BUS2”端至Futaba接收机标识“S.BUS2”的通道。
3)连接电子调速器油门信号线至Futaba接收机油门通道。
注意:支持输入电压为5-9V; “- P”端不提供电源输入。
03LED指示灯功能说明。
04-PWM、PPM、S.bus与DSM2接线方式解析

PWM、PPM、S.bus与DSM2接线方式解析一、PWM1、PWM的含义PWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:Paste_Image.png而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
2、PWM通信协议高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V 和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
脉宽宽度:50Hz信号多用于老式舵机,是上个世纪舵机的主要控制信号形式,其脉宽宽度为0.5ms至2.5ms。
300Hz 信号则是目前使用的最广泛的信号形式,其波形速度快,每秒可以传输300次,所以相应的脉宽也有所减小为0.9ms至2.1ms。
两种舵机控制信号如下图所示:50hz与300hz的PWM控制信号与角度关系PPM二、什么是PPMPWM信号被广泛用于舵机控制,但是它有一个明显的缺陷,就是有多少个舵机就需要多少个控制线路。
KS-servo 2.4 ghz FASST 兼容接收机 FM800 说明书
FM800说明书兼容性:KS-servo2.4ghz FASST兼容接收机FM800设计使用双叶FASST2.4ghz发射器和兼容双叶新LBT协议.FM800FASST最小和最轻的兼容市场上所有futaba遥控器,仅重2g,可以输出8ch的s-bus和8ch CPPM,专门为微型四轴飞行器设计。
规格:工作电流:50ma max工作电压:3.6~8.4v延迟:S.BUS模式:14@FASST多通道模式,16@FASST7ch模式CPPM模式:21女士@FASST多通道模式,24女士@FASST7ch模式灵敏度:大约-90dbm重量:约2g大小:l*W*H=30毫米*14毫米*3毫米输出模式:S.BUS或CPPM可以选择频道:8ch范围:全部1000米+设置:绑定过程:·打开FASST发射机·电池连接到接收器按下接收机的F/S按钮。
·既导致的连续循环如下:o红色LED灯(搜索无线电信号)o绿色LED灯(收到了无线电信号)o红灯灭了(绑定好了)o绿色LED持续闪烁10次(ID存储在内存中)o绿色LED灯长亮(正常操作)自动防故障装置设置:TX-failsafe特点:这种方法是设置在FASST发射机故障保险(工作通道3只有在FASST7ch模式或在多个通道FASST多渠道模式)在接收机工作,就像双叶接收器。
注意:我们强烈建议你设置故障保险功能在飞行模式。
设置时需要关闭油门,防止起飞或则失控飞走。
输出模式设置:如果你的接收机连接发射机,请关闭你的发射机。
当你的接收器的LED灯红,按住接收机F/S按钮超过6秒钟,不超过10秒,释放按钮,看到绿色的LED闪光灯,再次按下按钮,接收机回到红灯亮。
现在模式状态介于s-bus模式和CPPM(连续PPM信号在一线)模式之间。
当绿色LED闪光灯慢闪表明S.BUS模式向cppm模式转换。
当绿色led快闪则表示cppm模式向s-bus模式转换。
04 PWM、PPM、S.bus与DSM2接线方式解析

PWM、PPM、S.bus与DSM2接线方式解析一、PWM1、PWM的含义PWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:Paste_Image.png而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
2、PWM通信协议高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V 和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
脉宽宽度:50Hz信号多用于老式舵机,是上个世纪舵机的主要控制信号形式,其脉宽宽度为0.5ms至2.5ms。
300Hz 信号则是目前使用的最广泛的信号形式,其波形速度快,每秒可以传输300次,所以相应的脉宽也有所减小为0.9ms至2.1ms。
两种舵机控制信号如下图所示:50hz与300hz的PWM控制信号与角度关系PPM二、什么是PPMPWM信号被广泛用于舵机控制,但是它有一个明显的缺陷,就是有多少个舵机就需要多少个控制线路。
航模遥控协议
航模遥控协议航模遥控协议是指在航模飞行过程中,遥控器与飞行器之间的通信协议。
它是航模飞行的基础,对于飞行器的稳定性和飞行性能起着至关重要的作用。
本文将介绍航模遥控协议的基本原理、常见的协议类型以及在实际飞行中的应用。
首先,我们来了解一下航模遥控协议的基本原理。
遥控器通过无线电信号发送控制指令,飞行器接收并解析这些指令,从而实现飞行器的控制。
在这个过程中,遥控器和飞行器之间需要建立稳定的通信连接,以确保指令的准确传输和执行。
因此,航模遥控协议需要具备良好的抗干扰能力和高效的数据传输速率,以应对复杂的飞行环境和快速变化的控制需求。
在实际应用中,航模遥控协议通常采用频率调制(FM)或脉冲宽度调制(PWM)等技术来实现数据的传输。
频率调制是指通过改变无线电信号的频率来传输数字信号,而脉冲宽度调制则是通过改变脉冲信号的宽度来传输数字信号。
这两种技术各有优缺点,可以根据具体的应用场景选择合适的协议类型。
除了基本的通信原理外,航模遥控协议还需要考虑飞行器的控制需求和飞行环境的特点。
不同类型的飞行器可能需要不同的控制指令,例如固定翼飞机需要控制油门、方向舵和升降舵,而多旋翼飞行器则需要控制电机转速和姿态角度。
此外,飞行环境的特点也会影响到航模遥控协议的设计,例如在复杂的电磁环境中,需要采用抗干扰能力强的协议类型,以确保稳定的通信连接。
在实际飞行中,航模遥控协议的稳定性和可靠性对飞行器的安全性和飞行性能至关重要。
因此,在选择和使用航模遥控协议时,需要充分考虑飞行器的类型和应用场景,以确保协议能够满足飞行器的控制需求并具备良好的抗干扰能力。
同时,还需要注意遥控器和飞行器之间的通信距离和通信质量,以确保稳定的通信连接和可靠的控制指令传输。
总之,航模遥控协议是航模飞行的基础,对飞行器的控制和飞行性能起着至关重要的作用。
在实际应用中,需要根据飞行器的类型和应用场景选择合适的协议类型,并注意保证通信连接的稳定性和可靠性。
只有这样,才能确保飞行器能够安全、稳定地进行飞行,实现各种飞行动作和任务。
S.BUS2端口至S.BUS2端口的接线示例说明书
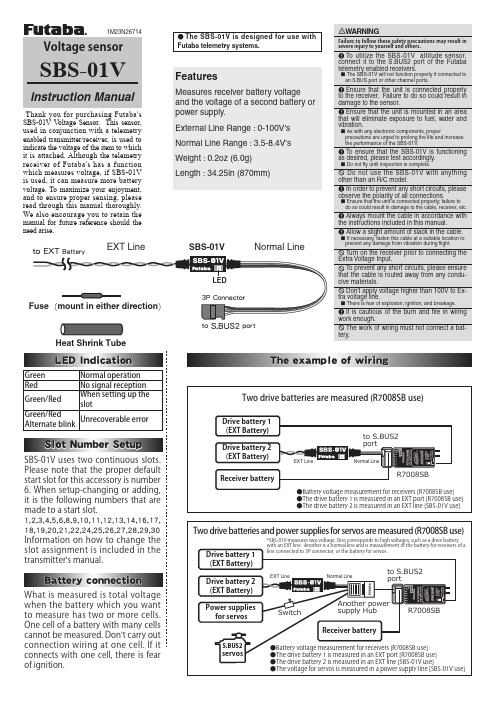
SBS-01VHeat Shrink TubeNormal LineEXT LineSBS-01V V oltage Sensor. This sensor, used in conjunction with a telemetry enabled transmitter/receiver, is used to indicate the voltage of the item to which it is attached. Although the telemetry receiver of Futaba's has a function which measures voltage, if SBS-01V is used, it can measure more battery voltage. To maximize your enjoyment, and to ensure proper sensing, please read through this manual thoroughly. We also encourage you to retain the manual for future reference should the need arise.●The SBS-01V is d esigned for use withFutaba telemetry systems.Green Normal operation Red No signal reception Green/RedWhen setting up the slotGreen/RedAlternate blinkUnrecoverable errorFeaturesMeasures receiver battery voltage and the voltage of a second battery or power supply.External Line Range : 0-100V's Normal Line Range : 3.5-8.4V's Weight : 0.2oz (6.0g) Length : 34.25in (870mm)Please note that the proper default start slot for this accessory is number 6. When setup-changing or adding, it is the following numbers that are made to a start slot.1,2,3,4,5,6,8,9,10,11,12,13,14,16,17,18,19,20,21,22,24,25,26,27,28,29,30Information on how to change the slot assignment is included in the transmitter's manual.when the battery which you want to measure has two or more cells. One cell of a battery with many cells cannot be measured. Don't carry out connection wiring at one cell. If it connects with one cell, there is fear of ignition.Measure the cable and then cut it to the desired length.Cut approximately 30mm of the negative (-, black) line from the cable.Solder the fuse inline on the negative wire and then reattach the section of wire that was previously removed. The fuse should be attached as close to the external power supply as possible.Place a piece of heat shrink tubing over the fuse, ensuring that it covers the soldered areas. Shrink the tubing snug to the fuse and the wire using a heat gun.The cable should be connected as shown in the diagram below. The cable gets connected to the wires that come off the ESC and connect to the battery.The manual for the Telemetry system should be referred to after the setup is complete; checking to make sure it functions as desired and that it provides the correct voltage on the display.Fuse to Black line (-)To MotorFUTABA CORPORATION1080 Yabutsuka, Chosei-mura, Chosei-gun, Chiba-ken, 299-4395, JapanPhone: +81 475 32 6982, Facsimile: +81 475 32 6983©FUTABA CORPORATION 2012, 10 (1)。
航模遥控器通信协议
航模遥控器通信协议篇一:航模遥控器原理飞机模型的无线电遥控,是指利用无线电波传送操作者对模型动作的指令模型根据指令做出各种飞行姿态。
用无线电技术对模型进行飞行控制的史,可以追溯到第二次世界大战以前。
不过,由于当时民间。
用无线电制航模面临十分复杂的法律手续,而且当时的遥控设备既笨重又极不可,因此,遥控航模未能推广开来到了本世纪60年代初期,随着电子技术发展,各种应用于航模控制的无线电设备也开始普及,时至今日,无线遥控设备已广泛地用于各种航空、航海和陆上模型。
本文介绍的“塞斯纳”177飞机模型套件材料中,配置的是四通道比例遥控设备系统,它由发射机、接收机、舵机、电源等部分组成。
图l所示的,是4通道比例遥控设备发射机的外型和各部分名称。
在发射机的面板上,有两根分别控制l、2通道和3、4通道动作指令的操纵秆,以及与操纵杆动作相对应的4个微调装置。
在发射机底部,设置有4个舵机换向开关,分别用于变换舵机摇臂的偏转方向。
图2所示的,是接收机和舵机以及接收机电源装置,其中接收机用来接收从发射机传来的指令信号,经处理后,指挥舵机作出与发射机指令相对应的动作。
电池组给接收机和舵机提供工作能源,它由4节普通5号干电池串联而成。
所谓比例控制,简单说来,就是当我们把发射机上的操纵杆由中立位置向某一方向偏移一角度时,与该动作相对应的舵机摇臂也同时偏移相应的角度,舵机摇臂偏转角度与发射机操纵杆偏移角度成比例.图3显示了发射机执行舵机与飞机模型舵面的动作关系。
当发射机操纵杆(或对应的微调杆)往左、右偏转或回复中立时,执行舵机的摇臂也随之相应地往左、右偏转或回复中立,带动模型的舵面往左,右偏转或回复中立,操纵杆(或微调杆)、舵机摇臂、模型舵面偏转的角度大小成比例。
4通道的比例遥控设备,可以同时对模型进行四个不同动作(例如油门、升降舵,方向舵,副翼)的比例控制。
这样的控制已十分接近载人飞机的操纵了。
因此,如果能熟练地运用遥控设备和充分地掌握模形飞行的原理,经过一段时间的刻苦练习,操纵者可象驾驶载人飞机一样控制模型在天空自由飞翔。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
航模遥控S-BUS协议解析
——写代码的Tobem
S-BUS的帧格式为每帧25个字节,除去起始字节(startbyte)、结束字节(endbyte)和校验标志(flags)后,中间的22个字节就是16个通道的数据了。
每个通道用11bit表示,范围是0-2047。
其中,data1为ch1的低8位,data2的低3位为ch1的高三位,data2的高5位是ch2的低5位,data3的低6位是ch2的高6位,以此类推。
实际中,只用到8个通道,因此,程序中只解析前面的8个通道。
因此,当接收到遥控数据并判断有效后(校验标志flags为0x00,即SBus_Buffer[22]==0X00),先把每一通道的值通过位的方式进行提取:
for(i=0;i<88;i++) //8个通道:8*11=88
{
if(Buff[Byte_in_Sbus]&(1<<Bit_in_SBus))
{
Channels[Channel_Count]|=1<<Bit_in_Channel; //按位方式进行通道数据提取}
Bit_in_SBus++;
Bit_in_Channel++;
if(Bit_in_SBus==8) //每取完8位,则字节数加1
{
Bit_in_SBus=0;
Byte_in_Sbus++;
}
if(Bit_in_Channel==11) //每取完11位,则通道数加1
{
Bit_in_Channel=0;
Channel_Count++;
}
}
其中,通道0对应横滚控制,通道1对应俯仰控制,通道2对应油门控制,通道3对应方向控制:
channel_roll.radio_in=Channels[0]; //横滚
channel_pitch.radio_in=Channels[1];//俯仰
channel_throttle.radio_in=Channels[2];//油门
channel_rudder.radio_in=Channels[3];//方向
通道4和通道5用于飞行模式的切换,由于其采用指拨开关,因此通过前后两次通道值的变化以及当前通道值所处区间来判断模式的改变:
if(fabs(Channels[4]-last_channel_4)>300) //条件成立,说明前后两次开关有改变
{
last_channel_4 = Channels[4]; //记录上一次的值
if(Channels[4]<400) //4通道用于控制模式切换:下;自动
{
control_mode = MANUAL;
}
else if(Channels[4]<1100) //中;增稳模式
{
control_mode = STABILIZE;
}
else if(Channels[4]<1750) //上;手动
{
control_mode =AUTO;
}
}
if(fabs(Channels[5]-last_channel_5)>300) //条件成立,说明前后两次开关有改变
{
last_channel_5 = Channels[5];
if(Channels[5]<400) //5通道用于飞行模式切换:下;返航
{
flight_mode = Loiter ;
}
else if(Channels[5]<1100) //中;航线
{
flight_mode = Navigation_Line;
}
else if(Channels[5]<1750) //上;盘旋
{
flight_mode = Rtl;
}
}
假如遥控器连接不正常(校验标志flags为0x0C,即SBus_Buffer[22]==0X0C),则按遥控归中处理:
if(SBus_Buffer[22]==0X0C) //遥控器连接不正常
{
channel_roll.radio_in=1024;
channel_pitch.radio_in=1024;
channel_throttle.radio_in=343;
channel_rudder.radio_in=1024;
}。