无碴轨道cp_自由设站边角交会网平差概略坐标计算方法研究
高速铁路无砟轨道CPIII控制网测量技术分析

高速铁路无砟轨道CPIII控制网测量技术分析【摘要】我国的高速铁路建设事业步入了一个辉煌阶段,无论从技术还是规模,都走到了世界前列。
其中精密工程测量技术是高铁建设的一个重要技术。
只有建立一套完整的控制测量系统,才能保证测量控制满足高速铁路运行与建设的高精度要求。
【关键词】高速铁路;CPIII控制网;高精度测量一、无砟轨道控制网概述高速铁路铺设无砟轨道所采用的工程测量平面控制网,按照《客运专线铁路无砟轨道工程测量技术暂行规》,原则上分为三级。
第一级为基础平面控制网CPI,第二级为CPⅡ线路平面控制网,第三级是轨道控制网CPIII。
CPI是为了建设初期的勘测、施工及运营提供坐标基准;CPⅡ为勘测和施工提供控制基准;CPIII就是沿线路两侧布设的三维控制网,主要为无砟轨道的铺设和轨道运营维护提供控制基准。
CPIII在高铁工程测量中具有精度高、点位分布密集、测量周期长、工作量大、技术新等特点,被用做首要运营与铺设维护基准。
CPIII平面网的布设网形十分规则、对称,网中所有控制点分布均匀,空间误差非常小。
二、轨道控制网CPIII的测设条件轨道控制网CPIII测量应在线下工程竣工,沉降变形观测评估通过后测量,在对基础平面控制条件复测并且合格后,在CPI、CPⅡ的复合性良好,并且气象条件较好的情况下,CPIII才可以进行观测,观测时测程内不能有任何遮挡物,场内不得有人体可以感受到的任何震动,否则,误差会很大,造成最终结果的错误。
CPIII平面网测量网形十分规则的测量控制网。
所有CPIII控制网点在网中的交互强度很高而且相隔均匀、误差很小,本身基本没有差异点。
并且CPIII平面网观测时采用全站仪自由设站的方法,因此不存在仪器对中误差。
CPIII平面网采用特殊的强制固定装置,保证了目标点重复安装的精度,也最大程度消减了仪器安装时的对中误差。
三、CPIII平面控制网测量以沪杭铁路客运专线CPⅢ控制网复测为例,试分析CPIII控制网测量在客运专线建设中的实施方案。
自由测站边角交会法单边测量CPⅢ网应用研究

自由测站边角交会法单边测量CPⅢ网应用研究郑健【摘要】利用V形天窗时段进行运营维护或升级、改造的运营铁路,在测设CPⅢ控制网时只能考虑采用自由测站边角交会单边测量的方法进行作业.通过仿真试验计算,并对客运专线的实测数据进行精度统计分析,得出如下结论:采用自由测站边角交会法单边测量CPⅢ网与常规方法所得到的成果基本一致,各项指标与设站作业的精度皆可满足相关规范的要求,且单边测量的方法更符合我国部分既有线路运营期维护的实际情况.【期刊名称】《铁道勘察》【年(卷),期】2017(043)006【总页数】4页(P40-43)【关键词】单边测量;自由测站边角交会;CPⅢ网;精度对比【作者】郑健【作者单位】中铁工程设计咨询集团有限公司,北京100055【正文语种】中文【中图分类】P221目前,中国已基本建成由四横四纵构成的铁路快速客运通道,时速200 km以上的铁路客运专线营业里程已突破1.9×104 km[1],值得关注的是数量如此庞大的高速铁路如何进行后期维护和改造工作。
CPⅢ控制网可为铁路客运专线的日常养护和维修提供控制基准,对轨道的平面位置和高程进行控制,保证轨道平顺性和列车平稳运行[2]。
常规的CPⅢ控制网布设和测量采用点对的形式进行作业,纵向点间距约为60 m,网形对称且结构强度高,相邻CPⅢ点间的相对点位中误差小于1 mm,每隔600 m左右与CPⅠ或CPⅡ点进行联测[3]。
辽宁省某客运专线在建设阶段未建立CPⅢ控制网,在扩能、升级改造过程中增设了CPⅢ控制网项目。
该客运专线的维修作业采用V形天窗,即上道维修时仅允许作业人员在上行线或者下行线其中的一侧滞留[4]。
此类型客运专线在升级改造的作业时段内仅允许人员在单侧滞留,常规自由测站边角交会测量CPⅢ控制网的方法无法实施。
CPⅢ控制网一般在线下结构物的沉降荷载稳定后建立,为后续的轨道工程施工提供控制基准[5]。
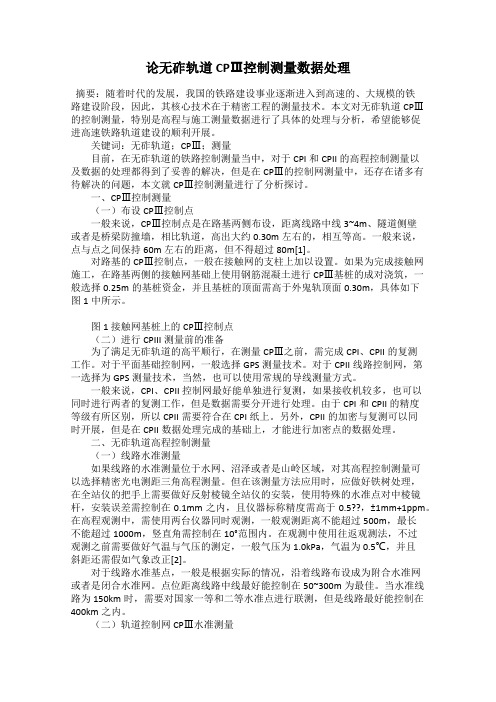
建立常规CPⅢ平面网需要保证有横向与纵向都高度对称的网形,同时观测沿线路纵向50~70 m间距成对埋设的CPⅢ点[6],构成的平面网形如图1所示。
高速铁路无砟轨道CPIII控制网测量的特点与技术

1 CP I I I 控 制 网 的特 点
具体来讲 , C P I I I I 是高速铁路精测网的第三级控制 网,主要作用 是将控制基准提供给无砟轨道 的铺设和运营维护。 具体来讲 , C P I I I 控
制 网 具 有 这些 优 点 :
1 . 1 全新的作业方式 通过研究发现, C P I I I 在测量 的过程 中 ,采用 了全新 的作 业方式 , 也就是 自由测站边角交会 , 相较 于传统 的普通控制 网测量方 法 , C P I I I 测量是没有已知边的 , 这样起算数据就无法提供 , 为了确定设 站坐标 , 采用的方法是作业过程 中涵盖 C P I I 或者 C P I 的 自由交会 ,这样 就可 以将各个 C P I l I 的坐标给解算 出来 。它有着较 短的测量距离和较为复 杂 的网型 , 并且需要很多次数 的测量每一个点 , 有着较大的工作量
1 . 2 有 着 较 高 的 精度 要求
随着时代的发展 , 客运专线铁路对精确性和平顺性 提出了更高的 要求 , 只有这样 , 列车高速行驶时的安 全性 和舒适性才可 以得到保证 , 那 么就需要从 毫米级的标准来要求 C P I I I 的精度 , 这样 才可以更好 的 进 行调 轨和维护工作。在 C P I I I 平面网 中, 要严格控制方 向观测 中的 误差, 保证其在 1 . 8以内 , 并且严格控 制距离观测 中误 差 以及 相邻点 相对中误 差, 保证在在 1 . 0 毫米以内, 控制可重复测量精度在 3 毫米以内。 要想促使伞网高平顺性符合相关要求 , 最为重要的一个精度指标就是相 邻点相对中误差。 因此, 在测量的时候 , 就需要将先进的现代化全站仪给应 用过来 , 它具有马达驱动 、 自 动照准以 及数据 自 动记录的功能 。 1 . 3 施 测有着较大 的难度 , 并且有着较大的工作量 通过 实践研究表 明, C P I I I 测量对环境有着较高 的要求 , 测量会受 到诸多因素的影响 , 如光线 、 气压 、 温度 、 粉尘等 , 影 响到测 站数据 , 并 且因为 网型 比较的 紧密 , 有着较 多的测站数量 , 并且 每一个 C P I I I 点 都需要 进行三次 以上 的测量 , 那么就ห้องสมุดไป่ตู้着较大的工作量 。
基于后方交会法的CPⅢ平面网自由设站观测方法研究及系统开发

基于后方交会法的CPⅢ平面网自由设站观测方法研究及系统开发作者:李科伟帅明明来源:《科技资讯》2017年第22期DOI:10.16661/ki.1672-3791.2017.22.006摘要:在中国高速铁路发展的今天,不管是对铁路的施工还是营运期间,均需要进行CPIII网测量,目前市面上的CPIII采集程序有些不足,在每站对12个方向目标进行学习测量时,必须全部逐一学习,比较耗时,有待优化改进,特别是在营运时期的有限外业时间内提高CPIII外业作业效率是非常必要的。
该文采用已知两点进行后方交会法自由设站,已知坐标批量导入作为学习值来迅速提高作业效率。
关键词:后方交会自由设站 CPⅢ测量 CPIII开发中图分类号:P258 文献标识码:A 文章编号:1672-3791(2017)08(a)-0006-03根据中国铁路总公司统计,截至2016年年底,我国铁路营运里程突破12.4万km大关。
在12.4万km中,高速铁路营运里程达到2.2万km,居世界首位,使我国成为世界上高速铁路营运里程最长、在建规模最大的国家。
按照原铁道部运输局运基线路[2010]554号文“关于发布《高速铁路运营沉降监测管理办法》的通知”第21条要求:“铁路局应组织对精测网进行定期或不定期复测……。
CPⅢ控制网及水准基点一般每年复测一次,……”,为此需要对CPⅢ网进行复测。
目前开通的诸如京沪、沪杭、沪宁、合蚌、武广、沪昆等高速铁路均开展了营运期的CPⅢ网复测工作。
而营运期的CPⅢ网测量只能在天窗时间作业,天窗时间长度一般为3~4 h不等。
在有限的外业时间内如何提高作业效率,按时保质完成测量工作非常重要。
该文通过对CPⅢ网自由设站边角交会观测方法的研究,提出“重复利用上一自由设站的目标学习值,采用后方交会原理对当前设站点进行自由设站定位,对新观测目标进行学习,在检查气象参数等其他设置后自动开始数据采集”的方法,并以此开发CPⅢ数据自动采集系统,迅速提高观测效率,大大节省了项目成本。
论无砟轨道CPⅢ控制测量数据处理
论无砟轨道CPⅢ控制测量数据处理摘要:随着时代的发展,我国的铁路建设事业逐渐进入到高速的、大规模的铁路建设阶段,因此,其核心技术在于精密工程的测量技术。
本文对无砟轨道CPⅢ的控制测量,特别是高程与施工测量数据进行了具体的处理与分析,希望能够促进高速铁路轨道建设的顺利开展。
关键词:无砟轨道;CPⅢ;测量目前,在无砟轨道的铁路控制测量当中,对于CPI和CPII的高程控制测量以及数据的处理都得到了妥善的解决,但是在CPⅢ的控制网测量中,还存在诸多有待解决的问题,本文就CPⅢ控制测量进行了分析探讨。
一、CPⅢ控制测量(一)布设CPⅢ控制点一般来说,CPⅢ控制点是在路基两侧布设,距离线路中线3~4m、隧道侧壁或者是桥梁防撞墙,相比轨道,高出大约0.30m左右的,相互等高。
一般来说,点与点之间保持60m左右的距离,但不得超过80m[1]。
对路基的CPⅢ控制点,一般在接触网的支柱上加以设置。
如果为完成接触网施工,在路基两侧的接触网基础上使用钢筋混凝土进行CPⅢ基桩的成对浇筑,一般选择0.25m的基桩资金,并且基桩的顶面需高于外鬼轨顶面0.30m,具体如下图1中所示。
图1 接触网基桩上的CPⅢ控制点(二)进行CPIII测量前的准备为了满足无砟轨道的高平顺行,在测量CPⅢ之前,需完成CPI、CPII的复测工作。
对于平面基础控制网,一般选择GPS测量技术。
对于CPII线路控制网,第一选择为GPS测量技术,当然,也可以使用常规的导线测量方式。
一般来说,CPI、CPII控制网最好能单独进行复测,如果接收机较多,也可以同时进行两者的复测工作,但是数据需要分开进行处理。
由于CPI和CPII的精度等级有所区别,所以CPII需要符合在CPI纸上。
另外,CPII的加密与复测可以同时开展,但是在CPII数据处理完成的基础上,才能进行加密点的数据处理。
二、无砟轨道高程控制测量(一)线路水准测量如果线路的水准测量位于水网、沼泽或者是山岭区域,对其高程控制测量可以选择精密光电测距三角高程测量。
2C互差对CP_平面网精度影响的仿真计算与分析
2011年1月第1期(总148)铁 道 工 程 学 报J OURNAL OF RA IL W AY ENG I N EER ING SOC I ETYJan 2011NO.1(Ser .148)收稿日期:2010-07-24作者简介:张绪丰,1985年出生,男,在读硕士研究生。
文章编号:1006-2106(2011)01-0015-052C 互差对CP 平面网精度影响的仿真计算与分析张绪丰1刘成龙1陈 澍1郑子天2(1.西南交通大学, 成都610031; 2.中铁二院工程集团有限责任公司, 成都610031)摘要:研究目的:在满足CP 网点间相对点位精度要求的前提下,在CP III 网实测数据添加符合正态分布的随机误差,以此来模拟2C 互差值,同时采用边角网间接平差的严密精度估算方法,探究2C 互差对CP 平面网主要精度的影响。
研究结论:根据无碴轨道CP 平面网外业观测的方法和特点以及测量现状,通过添加符合正态分布随机误差的方法,模拟2C 互差值,并采用某客专的部分数据进行了仿真计算。
通过对结果的分析,证明了2C 互差对CP 平面网的主要精度有一定的影响,然而,在起算数据精度较好和投影变形较小的前提下,通过本文的研究认为可以适度放宽2C 互差的限差至15 ,这时CP 平面网的主要精度指标仍能满足规范的要求,这样的话放宽2C 互差的限差指标可提高CP 平面网的测量效率,也为高速铁路工程测量规范的修订与完善提供基础资料。
关键词:2C 互差;正态分布随机误差;CP 平面网;相邻点位相对精度中图分类号:U 212.24 文献标识码:ASi m ulati ng Calculati on and Analysis of t he I mpact of 2CM ut ualDeviati on onAccuracy of CP Plane Net workZHANG Xu -feng 1,LIU Cheng -long 1,CHEN Shu 1,ZHENG Zi -tian 2(1.Southw est Jiao tong Un i v ersity ,Chengdu ,S ichuan 610031,China ;2Ch i n a R ail w ay Eryuan Eng ineeri n g Group Co .Ltd ,Chengdu ,S ichuan 610031,China)Abst ract :R esearch purposes :The rando m error wh ich confor m ed to the nor m al d istr i b ution w as appended to the observed date o f CPIII net w ork to si m u late the 2C m utua l dev i a ti o n under the pre m ise o f m eeting the requ ire m ent o f re lative po i n t position accuracy of CP ne t w ork ,and also the tight and precise esti m ation m ethod for calcu lati o n of the i n direct ad j u st m ent ofm arg i n net w ork w as used for exp lori n g the i m pact o f 2C mutual dev iation on the accuracy o f CPIII plane net w or k.R esearch concl u sions :The va l u e of 2C m utua l deviati o n w as si m ulated by add i n g the rando m error confo r m ed to the nor m a l distri b u ti o n ,and the si m u lation calcu lation o f the partia l date of one passenger dedicated li n e w as m ade ,acco r d i n g to the fie l d observati o n m ethod and features as w e ll as m easure m ent situati o n of ballastless track CPIII p l a ne net w or k.The ana l y si resu lt sho w ed t h e 2C m utua l deviati o n has certain i m pact on the accuracy o fCPIII plane net w ork .But under the pre m ise o f hav ing good i n itial calc u lation data and little pro jecti o n distorti o n ,the m ain m easure m ent prec isions o f CPIII p lane net w o r k could m eet the specificati o n requ ire m ent by w iden i n g the 2C mutual dev iation to 15seconds .Such w i d ening the 2C m utual dev iation cou l d enhance t h e m easure m ent efficiency o f CPIII p lane net w or k and prov i d e he funda m enta l data for the rev isi o n and i m pr ove m ent o f the eng i n eering sur vey specification for h i g h-speedra il w ay .K ey w ords :2C mu t u a l dev iation ;nor m al d istri b uti o n rando m error ;CP plane net w or k;re lati v e precisi o n bet w een ad jacentm easure m ent spots高速铁路无碴轨道要求具有良好的平顺性,CP 控制网是保证这一要求的关键技术。
高速铁路无砟轨道CPIII控制网布设及测量技术
高速铁路无砟轨道CPIII控制网测量技术陈士清摘要:高速铁路无砟轨道要求具有良好的稳定性、连续性和高平顺性,施工中需采用高精度三维控制测量技术。
本文结合哈大铁路客运专线运粮河特大桥CPIII建网的工程实践,介绍高速铁路无砟轨道CPIII建网的技术特点、技术要求以及测量方法。
关键词:高速铁路无砟轨道CPIII建网测量技术1 引言高速铁路客运专线无砟轨道是以钢筋混凝土或沥青混凝土整体式道床取代散粒体道砟道床的轨道结构,与有砟轨道相比,无砟轨道主要具有以下特点:良好的轨道稳定性、连续性和平顺性;良好的结构耐久性和少维修性能;工务养护、维修设施减少;减少客运专线对特级道砟的需求;免除高速行车条件下有砟轨道的道砟飞溅;有利于适应地形选线,减少线路的工程投资;可减轻桥梁二期恒载,降低隧道净空;一旦基础变形下沉,修复困难,要求有坚实、稳定的基础。
自2O世纪6O年代开始,世界各国相继开展了各类无砟轨道的研究。
在日本,板式轨道已在新干线大量铺设,新建铁路的无砟轨道已超过全线的90%,铺设总长度达2700km。
德国铁路Rheda、Ztiblin等无砟轨道已在新建的高速线上全面推广,无砟轨道占线路总长的80%以上,铺设总长度达到800 km。
我国在吸取国外研究先进成果的基础上,结合我国高铁建设的实际情况对无碴轨道也进行了大量的研究和工程实践。
为了适应客运专线铁路高速行车对平顺性、舒适性的要求,客运专线铁路轨道必须具有较高的平顺度标准,我国对时速大于200 km/h以上铁路轨道平顺度均制定了较高的精度标准。
对于无砟轨道,轨道施工完成后基本不再具备调整的可能性,由于施工误差、线路运营以及线下基础沉降等所引起的轨道变形只能依靠扣件进行微量的调整是。
客运专线扣件技术条件中规定扣件的轨距调整量为±10 mm,高低调整量一4、+26mm,因此,对施工测量精度有着较有碴轨道更严格的要求。
2 概述由于过去传统的铁路运行速度较低,对轨道平顺性的要求不高,在勘测、施工中没有要求建立一套适应于勘测、施工、运营维护的完整的控制测量系统。
高速铁路大跨度连续梁CPIII建网技术研究分析
高速铁路大跨度连续梁CPIII建网技术研究分析摘要:为适应高速铁路无砟轨道高平顺性、高稳定性的要求,保障高速行车安全,为线上工程提供可靠性强、精度高的控制网成为新的课题,轨道控制网(CPIII)的引入是解决这一问题的关键。
但是在大跨度连续梁上的CPIII控制网的点位布设、测量及应用与普通桥梁地段还有一些区别。
关键词:大跨度连续梁;CPIII控制网测量;CPIII控制网的点位布设1、CPIII控制网工作内容1.1 CPIII测量前的准备工作(1)线下工程沉降变形和连续梁梁体徐变评估已经通过(2)精测网复测完成,复测成果审查通过;按照《高速铁路工程测量规范》(TB10601-2009)及《高速铁路轨道工程施工质量验收标准》(TB10754-2018)要求,CPⅢ建网前应对精测网进行全面复测;(3)桥梁防撞墙、路基接触网杆基础、隧道排水沟和电缆槽、隧道边墙等施工完成;(4)CPⅡ加密点和CPⅢ标志预埋完成;(5)CPⅢ测量用棱镜、连接杆件和CPⅢ测量软件准备完成;(6)CPⅢ测量技术方案审查通过;(7)CPⅢ测量前做好观测条件保证措施。
1.2测量内容(1)线上CPⅡ控制网加密;(2)线上二等水准网加密;(3)CPⅢ平面、高程建网测量;(4)CPⅢ平面、高程复测CPII控制点加密、二等水准基点加密(含桥上下三角高程传递、桥下水准点引测、桥上水准贯通测量)、CPIII控制网测量及复测。
CPⅢ施测人员及设备情况CPⅢ建网和复测人员均应具有CPⅢ控制网测量经历和丰富的CPⅢ数据处理经验;CPⅢ数据采集使用TSDI_SURVEY(机载多测回测角软件),CPⅢ数据处理使用TSDI_HRSADJ精密工程测量平差处理软件系统。
2.路桥段GNSS加密CPⅡ测量2.1选点埋石CPⅡ加密点应采用强制对中标,在桥梁部分CPⅡ加密点需上桥,应单独埋设CPⅡ加密点(预埋件竖立埋设,并保证标口水平),并且沿线路前进方向埋设于桥梁的固定支座顶端的防撞墙顶(纵横向均固定),CPⅡ加密点间距600米左右(400~800米);路基段应在路肩处埋设加密桩,加密桩应高出轨面(保证CPⅢ网联测条件),埋设应满足《高速铁路工程测量规范》中CPⅡ控制桩要求,需埋设在两个接触网杆之间稳固可靠,不影响行车安全,并方便CPⅢ网联测的地方;加密CPⅡ点在隧道口附近时应考虑GNSS观测条件及点的稳定性,并兼顾与洞内CPⅡ测量的联测,以保证洞内外的顺接性;CPⅡ加密点布设时应避开车站、声屏障等有遮挡处,必要时应据现场条件选定合适的位置。
无碴轨道cp_自由设站边角交会网平差概略坐标计算方法研究
分区无定向概略坐标计算程序框图如图 4所示。
3 温福线八仙仑隧道 CP Ó 网分区无定向概 略坐标计算
温福线八仙仑隧道全长 617 km, 隧道洞内 CP Ó
图 4 分区无定向概略 坐标计算程序
控制网采用自由设站边角交会的方法建网, 共有 222 个 CP Ó 控制点。
按照上述 CP Ó 分区无定向概略坐标计算方法, 对 八仙仑隧道 CP Ó 网点的概略坐标进行计算, 并与常规 无定向概略坐标计算方法进行比较。部分 CP Ó 控制 点两种方法计算的概略坐标及其平差坐标如表 1。
点之间未进行直接观测, 因此在计算 CP Ó 点概略坐标 时, 只能采用无定向概略坐标计算的方法。无定向概
略坐标计算时, 需要将 CP Ó 点的坐标从假定坐标系中
转换到以 CP Ñ 或 CP Ò 点为基准的坐标系中, 此坐标
转换过程可采用四参数坐标转换的方法。
四参数坐标转换公式为
x = $x + ( 1 + k) cosA sinA xo
令 CP Ó 点坐标转换后的坐标为虚拟观测值, 其与
原始已知坐标之差为虚拟观测值的改正数, 则可列出
虚拟观测值的误差方程式为
XS VX = 1 0 S @cosA - S @sinA YS VY 0 1 S @sinA S @cosA cosU
s inU
Xo CP Ó
Yo CP Ó
( 8)
式中,
Xo CP Ó
关键词 无碴轨道 CP Ó 网 概略坐标 分区无定向
无碴轨道客运专线铁路工程测量平面控制网分三 级布设, 第一级为基础平面控制网 (CPÑ ), 第二级为线 路控制网 (CPÒ ), 第三级为基桩控制网 (CP Ó ) [ 1] 。CP Ó 网主要为铺设无碴轨道和运营维护提供控制基准。
高速铁路CP_交会网必要测量精度的仿真计算
目前我国正在大规模地进行客运专线建设 ,客运专线大多数采用无砟轨道技术 ,无砟轨道技术具有维 [1] 修量小 、 稳定性高等特点 . 由于客运专线列车运行速度快 ,因此 ,对线路的平顺性要求比较高 . 而无砟轨 [2] 道线形的平顺性是依据 CP Ⅲ基桩控制网 和自由设站三维后方交会设站测量 , 通过轨道精调后实现 [3] 的 . 所以 ,无砟轨道施工测量控制技术已成为无砟轨道建设能否成功的关键技术之一 . 只有 CP Ⅲ 控制网 的精度得到了保证 ,无砟轨道的高平顺性才有可能实现 . CP Ⅲ 控制网是沿线路布设的控制无砟轨道施工的三维施工控制网 , 也是线路运营后轨道线形监测和
1 CP Ⅲ 网的测量网形
1. 1 标准 CP Ⅲ 网的测量网形与联测方法
标准 CP Ⅲ 网的网形 、 控制基准和观测方法见图 1. 从图 1 可见 : ( 1 ) CP Ⅲ 网是一个布网非常规则 、 对称的测量控制网 ; ( 2 ) 所有 CP Ⅲ 点在网中的交互强度很高且分布均匀 ; ( 3 ) CP Ⅲ 网采用全站仪自由测站观测 ,不存在仪器对中误差 ; ( 4 ) 自由测站间的间距一般为 120 m ,且测站均匀分布在线路中线附近 ; ( 5 ) 每个 CP Ⅲ 点至少有 3 个方向的边角交会 ,每个测站需要观测的方向和距离均为 12 个 (不包括联 测上一级控制网点 ) ; ( 6 ) CP Ⅲ 点采用特殊的强制固定装置 ,保证了目标点重复安装的精度 , 也最大程度地减小了棱镜安 装时的对中误差 . 标准 CP Ⅲ 网测量时 ,需要与上一级控制点 CP Ⅰ 或 CP Ⅱ 进行联测 . 联测的基本原则为 : 自由测站两侧 若有距离适中的 CP Ⅰ 或 CP Ⅱ 点 ( CP Ⅰ 或 CP Ⅱ 点距线路中线的距离应 ≤300 m ) ,则在该测站的 CP Ⅲ 测量 时应联测 CP Ⅰ 或 CP Ⅱ 点 ,而且此后的连续 2 个自由测站最好均与这个 CP Ⅰ 或 CP Ⅱ 点进行联测 . 理论分 析和实践证明 ,这种观测方法对整个网形的精度控制是十分有利的 . 但线路施工现场复杂多变的通视情 [7] 况 ,使观测过程中要做到连续 3 个自由测站与同一个 CP Ⅰ 或 CP Ⅱ 控制点联测是十分困难的 . 因此 ,可 以对标准的 CP Ⅲ 网的测量网形和联测方法加以改进 ,使其在既能保证 CP Ⅲ 网精度要求的基础上 ,又能与 施工现场 CP Ⅲ 网外业观测的实际情况相配套 . 1. 2 改进 CP Ⅲ 网的测量网形与联测方法 从施工现场 CP Ⅲ 网测量的实际情况出发 ,可以对标准的 CP Ⅲ 联测方法和测量网形进行以下改进 : 在 通视条件不好的路段 ,可首先对其联测上一级控制点的方法进行改进 ,其次还可以对 CP Ⅲ 网中自由测站 的间距和一个测站观测 CP Ⅲ 点的数量进行修改 . 与上一级控制点联测方法的改进如图 2 所示 . 在图 2 中 ,各 CP Ⅲ 点纵向间距为 60 m ,自由测站点间距为 120 m ,每次设站观测 12 个 CP Ⅲ 点 . 当自由 测站点与附近的 CP Ⅰ 或 CP Ⅱ 点通视良好且距离适中时 ,就直接与该 CP Ⅰ 或 CP Ⅱ 点联测 ,否则采用本文 中提出的间接联测的方法 : 通过加密的自由测站 J001 和 J002 使 CP Ⅲ 点和 CP Ⅱ 点间接发生关系 . 图 2 中
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转换参数 $x、$y、k、A。根据 公共点求 得的转换 参数
$x、$y、k、A, 利用四参数转换模型, 即可将计算的 CP Ó
坐标转换到以 CPÑ或 CPÒ点为基准的坐标系中。
分区无定向概略坐标算法是对常规无定向概略坐
标算法的一种改进, 该方法计算的概略坐标与其真值
偏差较小, 特别适用于 CP Ó 网点概略坐标的计算。
478 9191446 7
2 883 3611115 4
478 9141017 2
2 883 3241021 8
478 8651158 4
2 883 3351364 1
478 8591858 7
2 883 2981251 7
478 8111099 4
2 883 3091535 8
478 8051602 3
( 9)
y新
$y
- s inA cosA yo 旧
式中, $x, $y 为 平移 参数; k 为 尺 度参 数, A为 旋 转
28
铁道勘察
2008年第 3期
参数。
将上式中的四个转换参数作为平差参数开列误差
方程得 vx = D$x + ( xo cosAo + yo sinAo ) Dk +
( - xo ( 1 + ko ) s inAo + yo ( 1 + ko ) cosAo ) DA- lx
如图 3所示, 假设设站点 S 在仪器站心坐标系下
的坐标为 ( 0, 0), 则 CP Ó 点在仪器站心坐标系下的坐
标为
X cCP Ó = S @cosA
( 5)
YcCP Ó = S @sinA
( 6)
式中 A、S 分别为自由设站的方向、距离观测值。
仪器站心坐标系与 CP Ó 网坐标系的坐标转换关
系式为
2 883 2721540 2
478 7561977 1
2 883 2831736 0
478 7511334 8
2 883 2461661 8
478 7021532 5
2 883 2581027 0
478 6971263 3
XB = XS + SSB @cos( ASA + B)
( 3)
YB = YS + SSB @s in( ASA + B)
( 4)
212 自由设站坐标计算
要求设站点对两个或两个以上 CP Ó 点进行方向
和距离的观测, 且被观测 CP Ó 点的坐标已被极坐标计
算方法求出。自由设站坐标计算的方法如下。
图 3 自由设站坐标计算示意
XCPÓ - XS = cosU - s inU @ X cCPÓ
( 7)
YCPÓ - YS
sinU cosU
YcCP Ó
式中, XCPÓ 、YCPÓ 为 CP Ó 点 在 CP Ó 网坐标系中的 坐 标; XS、YS 为设站点 S 在 CP Ó 网坐标系中的坐标; U为 自由设站水平度盘零方向的坐标方位角。
478 8051598 9
2 883 2721546 4
478 7561974 1
2 883 2831741 0
478 7511331 8
2 883 2461666 6
478 7021529 8
2 883 2581031 6
478 6971260 6
分区无定向概略坐标计算
X
Y
2 883 3491812 6
因此, 要实现 CP Ó 网的严密平差和精度评定, 必 须正确计算 CP Ó 网点的概略坐标。CP Ó 自由设站边 角交会网与常规测量控制网不同, 常规方法无法正确 推算其概略坐标, 需对常规方法进行改进。
2 CP Ó 网分区无定向概略坐标计算方法
分区无定向概略坐标算法的基本思路为: ( 1)以测站为单位, 令 CP Ó 自由设站边角交会网 第一个设站点的坐标为 ( 0, 0), 第一个设站点到 其观 测的第一个方向的方位角为 0。 ( 2)按极坐标计算方法或自由设站坐标计算方法 计算坐标。当计算 的坐标中, 有一定数量的 CP Ñ 或 CP Ò 点时, 则采用四参数坐标转换的方法将已推算的 CP Ó 点的坐标转换到以 CP Ñ 或 CP Ò 点为基准的坐 标系中。 ( 3)令下一个测站的设站点坐标为 ( 0, 0), 该设站 点到其观测的第一个方向的方位角为 0, 重复上述 ( 2)、 ( 3)过程, 则可完成全部 CP Ó 点概略坐标的计算。 分区无定向概略坐标算法主要由极坐标计算、自 由设站坐标计算、四参数坐标转换 3部分组成, 下面介 绍其各部分计算的数学模型。
由表 1比较分析可以看出, 采用分区无定向概略 坐标计算方法计算的概略坐标与平差坐标较为接近, 最大较差为 713 mm, 而采用常规无定向概略坐标计算 方法计算的概略坐标与平差坐标差异较大, 最大较差 为 4614mm。
表 1 八仙仑隧道部分 C P Ó 控制点平差坐标、概略坐标
m
点名
29 63 01 29 63 02 29 63 03 29 63 04 29 63 05 29 63 06 29 63 07 29 63 08 29 63 09 29 63 10
分区无定向概略坐标计算程序框图如图 4所示。
3 温福线八仙仑隧道 CP Ó 网分区无定向概 略坐标计算
温福线八仙仑隧道全长 617 km, 隧道洞内 CP Ó
图 4 分区无定向概略 坐标计算程序
控制网采用自由设站边角交会的方法建网, 共有 222 个 CP Ó 控制点。
按照上述 CP Ó 分区无定向概略坐标计算方法, 对 八仙仑隧道 CP Ó 网点的概略坐标进行计算, 并与常规 无定向概略坐标计算方法进行比较。部分 CP Ó 控制 点两种方法计算的概略坐标及其平差坐标如表 1。
图 1 C P Ó 自由设站边角交会网形示意 (单位: m)
自由设站边角交会测量方式在国内并不多见, 国 内较为通用的测量平差软件均不能很好地对 CP Ó 网 观测数据进行平差和精度评定, 原因在于 CP Ó 网形是 狭长形的, 且 已知点未置镜, 常规方 法无法正确推 算
收稿日期: 2008204223 第一作者简介: 王鹏 ( 1982) ), 男, 2006年毕 业于西南 交通大学 测绘工 程专业, 工学学士, 在读硕士研究生。
、YCoP
Ó
为
CP
Ó
点在
CP
Ó
网坐标 点个数大于 2时, 按间接平差原理, 令权阵 P 为单位阵, 满足 VTP V= m in的原则进行参数 估计, 则可求出设站点 S 在 CP Ó 网坐标系中的坐标。
213 四参数坐标转换
CP Ó 自由设站边角交会网观测时, CP Ñ 或 CP Ò
211 极坐标计算
当设站点的坐标已被自由设站坐标计算方法求出 时, 可采用极坐标的方法计算各 CP Ó 点的坐标。极坐 标计算要求具备的条件为两个已知点或一个已知点和 一个已知方位角 [ 4 ] 。
图 2 极坐标计 算示意
如图 2所示, 角度 B为边 SSA、SSB 的夹角, ASA为 SA 方向的方位角, S 点的坐标为 (XS、YS ), 则 B 点坐标的 计算模型为
( 12) ly = y - ( $yo + ( 1 + ko ) (- xo sinAo + yo cosAo ) )
式中 $xo, $yo, ko, Ao 为平差参数的概略值。
( 13)
若公共点的个数大于 2, 则可根据最小二乘原理, 满足 VTP V= m in的原则进行参数估计, 求得无偏最优的
令 CP Ó 点坐标转换后的坐标为虚拟观测值, 其与
原始已知坐标之差为虚拟观测值的改正数, 则可列出
虚拟观测值的误差方程式为
XS VX = 1 0 S @cosA - S @sinA YS VY 0 1 S @sinA S @cosA cosU
s inU
Xo CP Ó
Yo CP Ó
( 8)
式中,
Xo CP Ó
CP Ó 网平差所需的概略坐标。因 此, 要实现 CP Ó 自 由设站边角交会网平差和精度评定, 关键在于其网点 概略坐标的正确计算。
1 概略坐标精度对平差结果的影响
用计算机程序实现测量平差计算, 一般都采用间
接平差的方法。CP Ó 网间接平差时, 首先要列出网中
各类观测量的误差方程式。 CP Ó 网中观测量有 边长
数展开, 保 留一 次 项, 略去 二 次及 二 次 以上 的 高 次 项 [ 2 ] 。线性化的误差方程为
v = f (x0i, y0i, xj0, yj0 ) +
9f 9x i
Dxi +
0
9f 9y i
Dyi +
0
9f 9xj
Dxj +
0
9f 9yj
Dyj -
0
L
( 2)
式中, x0 为未知参数的近似值, Dx为其相应的改正数。
线性化的误差方程式是个近似式, 略去了 Dx 的二
无碴轨道 CPÓ 自由设站边角交会网平差概略坐标计算方法研究: 王 鹏 刘成龙 杨 希
27
次以上的各项, 这种线性化处理方法的前提是未知参 数的近似值与其真值的偏离相对较小 [ 3] 。当 Dx 很大 时, 即近似坐标的精度不高时, 略去的高次项将会影响 平差值的精度。
26
铁道勘察
2008年第 3期
无碴轨道 CP Ó 自由设站边角交会网平差概略 坐标计算方法研究
王 鹏 刘成龙 杨 希
(西南交通大学土木工程学院, 四川成都 610031)
R esear ch on Ca lcu la tion M ethods of Pr elim inary Coord inates for Ad justm en t in Ba llastless T rack Base2P iles Con trol Poin ts Ó w ith F ree2Station L inear2Angu lar I nter section