ADAS驾驶辅助系统测试方案-风丘科技
adas模型实验报告

adas模型实验报告ADAS模型实验报告摘要:本实验旨在使用ADAS模型对交通场景中的车辆进行智能驾驶决策。
通过对实验数据的收集和分析,我们评估了ADAS模型在不同交通场景下的性能,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
引言:随着自动驾驶技术的不断发展,ADAS(Advanced Driver Assistance Systems)模型已经成为智能驾驶系统的核心组成部分。
该模型通过对车辆周围环境的感知和分析,实现了对驾驶决策的智能化处理,从而提高了驾驶安全性和效率。
实验方法:本实验使用了一辆配备了ADAS模型的自动驾驶汽车,并在不同的交通场景下进行了测试。
我们收集了车辆感知和行为数据,并对其进行了分析。
通过对比实验数据和模型预测结果,我们评估了ADAS模型在不同交通场景下的性能表现。
实验结果:实验结果显示,ADAS模型在城市道路、高速公路和复杂交叉路口等不同交通场景下都表现出了良好的性能。
模型能够准确地感知周围车辆和行人,并做出相应的驾驶决策。
此外,我们还对模型进行了一些改进和优化,进一步提高了其性能。
讨论:通过本实验,我们发现ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
然而,该模型在复杂交通场景下仍然存在一些挑战,需要进一步的改进和优化。
未来,我们将继续深入研究ADAS模型,并探索其在自动驾驶技术中的更广泛应用。
结论:本实验对ADAS模型在交通场景中的性能进行了评估,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力,为智能驾驶技术的发展提供了有力的支持。
我们相信,通过不断地研究和创新,ADAS模型将在未来的智能驾驶系统中发挥越来越重要的作用。
ADAS开发及测试系统解决方案设计设计

ADAS开发及测试系统解决方案高级驾驶员辅助系统(ADAS) 作为实现车辆主动安全的关键系统,已经越来越多的配置到各种级别的乘用车和商用车上。
同时面对日益加强的法律法规,基于FAS-CAM( 前视主动安全摄像头) 的ADAS 解决方案将逐渐成为Euro-NCAP五星安全等级车辆的必须配置。
随着ADAS 控制器功能的增加,控制系统硬件、图像处理、算法策略、与整车其他子系统的交互越来越复杂,这将给开发过程和测试过程带来前所未有的挑战。
在汽车HIL 系统领域,针对新兴的ADAS 系统开发、测试的解决方案可以解决实车开发测试一致性差、效率低、周期长、成本昂贵、危险性高的弊端。
采用仿真技术的硬件在回路(HIL)测试系统在ADAS 系统开发、测试阶段可以很好的解决以下问题:•摄像头功能调试;•摄像头性能分析;•摄像头标定;•EuroNCAP 摸底测试;•场地试验;•控制策略验证;•网络通讯测试;•失效保护测试;•HMI 功能测试;•无人车控制算法的开发与测试。
ADAS开发及测试系统组成:外围系统测试内容•算法功能♦车道线偏离报警(LDW, Lane Departure Warning)♦前方碰撞预警(FCW, Forward Collision Warning)♦前方碰撞预警(FCW, Forward Collision Warning)♦智能大灯控制(IHC, Intelligence Headlamp Control)♦限速标志识别(TSR/SAS, Tra-c Sign Recognition, Speed Assist System) ♦自动紧急刹车(AEB/AEBP, Autonomous Emergency Braking)♦自适应巡航(ACC, Adaptive Cruise Control)♦自适应巡航(ACC, Adaptive Cruise Control)•系统功能♦针对Euro-NCAP的虚拟场地测试♦针对Euro-NCAP的虚拟场地测试♦失效保护测试♦系统网络性能测试解决方案服务内容:根据客户控制系统功能提供:•系统测试解决方案•搭建定制的HIL测试系统•提供完整的视频处理测试系统•提供ADAS控制器快速原型系统•用户控制器信号匹配(用户提供控制器)•车辆动力学模型参数化•CAN网络报文集成(用户提供DBC文件)•HMI demo开发•测试用例开发(基于Euro-NCAP不同星级标准)•提供工况素材•测试数据分析该方案的优势•采用世界领先的MobilEye®单目视觉解决方案•采用针对ADAS应用的世界领先的IPG车辆空力学模型•采用先进的自动代码生成技术的快速控制原型系统•可针对Euro-NCAP及其他标准进行评分测试•可进行针对SOP阶段的摄像头标定测试•支持外部视频注入,可实现全工况模拟•可进行HMI快速开发、测试、验证•支持人在环测试。
ADAS开发及测试方案
ADAS开发及测试方案先进驾驶辅助系统(Advanced Driver Assistance Systems)简称ADAS,是利用安装于汽车上的各种传感器,及时采集车内外的环境数据,进行静动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,并采取必要的动作,从而更好地保护乘客的安全,保障车辆及周围交通环境的安全。
随着ADAS系统的引入,汽车变得越来越智能,也极大地提升了车辆驾驶的安全性,因此ADAS也成为整车厂新的竞争利器。
ADAS的组成非常广泛,包括了夜视系统、主动巡航控制系统(ACC)、电子稳定程序(ESP)、随动转向前照灯(AFS)、车道偏移报警(LDW)、防碰撞技术(FCW)、盲点检测技术(BSD)以及泊车辅助技术(PLA)等。
ADAS系统的开发具有特殊性,除了遵从一般ECU的V模式开发流程外,由于ADAS系统的实时性非常重要,需要实时与不同类型的传感器进行数据交换(比如摄像头、激光雷达、雷达、车辆CAN总线、GPS等),而且需要方便的集成新的功能和算法,因此,ADAS系统的软件开发需要解决很多挑战,比如多线程编程、数据样本时戳和再同步、数据延时测量和预估,系统优化和性能评估、代码重用和软件应用维护等。
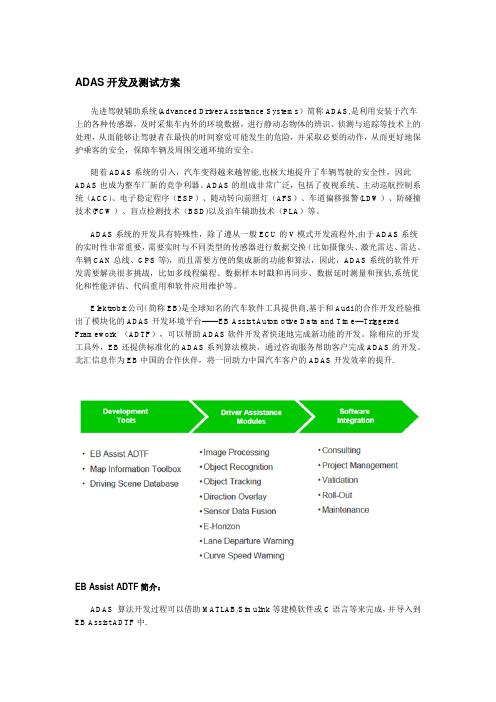
Elektrobit公司(简称EB)是全球知名的汽车软件工具提供商,基于和Audi的合作开发经验推出了模块化的ADAS开发环境平台——EB Assist Automotive Data and Time—Triggered Framework (ADTF),可以帮助ADAS软件开发者快速地完成新功能的开发。
除相应的开发工具外,EB还提供标准化的ADAS系列算法模块,通过咨询服务帮助客户完成ADAS的开发。
北汇信息作为EB中国的合作伙伴,将一同助力中国汽车客户的ADAS开发效率的提升.EB Assist ADTF简介:ADAS 算法开发过程可以借助MATLAB/Simulink等建模软件或C语言等来完成,并导入到EB Assist ADTF中.EB Assist ADTF能够从不同的源获取并同步数据,包含不同类型的传感器数据并且同步和不同总线数据(LIN、MOST、CAN和FlexRay)的交互。
一种基于车载摄像头的ADAS功能测试系统[实用新型专利]
![一种基于车载摄像头的ADAS功能测试系统[实用新型专利]](https://img.taocdn.com/s3/m/af467751cbaedd3383c4bb4cf7ec4afe04a1b1a5.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202020333659.X(22)申请日 2020.03.17(73)专利权人 中汽数据(天津)有限公司地址 300380 天津市西青区中北镇万卉路3号新城市中心B座12-17室(72)发明人 王磊 陈超 宝鹤鹏 赵帅 杨磊 纪东方 仝湘媛 袁悦 (74)专利代理机构 天津企兴智财知识产权代理有限公司 12226代理人 陈雅洁(51)Int.Cl.G05B 23/02(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种基于车载摄像头的ADAS功能测试系统(57)摘要本实用新型提供了一种基于车载摄像头的ADAS功能测试系统,包括黑箱;黑箱内设有车载摄像头和显示器;车载摄像头镜头与显示器屏幕相对设置;黑箱外设有一号PC机和二号PC机;车载摄像头与二号PC机的I/O接口连接,二号PC机与一号PC机通过串口UPD通信连接,一号PC机的I/O接口与显示器连接;车载摄像头及显示器均设有高度调节支架。
本实用新型一种基于车载摄像头的ADAS功能测试系统配合使用黑箱、车载摄像头、显示器、一号PC机和二号PC机,搭建适用于所有ADAS的功能测试系统;可以无需调整黑箱内的设备,不依赖于ECU,具有适用范围广、操作便捷以及测试效果好的特点。
权利要求书1页 说明书4页 附图1页CN 212135223 U 2020.12.11C N 212135223U1.一种基于车载摄像头的ADAS功能测试系统,其特征在于:包括黑箱;所述黑箱内设有车载摄像头和显示器;所述车载摄像头镜头与所述显示器屏幕相对设置;所述黑箱外设有一号PC机和二号PC机;所述车载摄像头与所述二号PC机的I/O接口连接,所述二号PC机与所述一号PC机通过串口UPD通信连接,所述一号PC机的I/O接口与所述显示器连接;所述车载摄像头及所述显示器均设有高度调节支架;所述二号PC机用于安装待测试的ADAS系统;所述一号PC机是用来仿真车辆运行情况和道路场景;所述显示器用来显示车辆运行前方画面。
CAN FD一致性测试:便捷、高效的自动化测试系统
CAN FD一致性测试:便捷、高效的自动化测试系统引言:后起之秀——CAN FD:随着各个行业的快速发展,消费者对汽车电子智能化的诉求越来越强烈,这使得整车厂将越来越多的电子控制系统加入到了汽车控制中,且在传统汽车、新能源汽车、ADAS和自动驾驶等汽车领域中也无不催生着更高的需求,可见传统CAN总线已明显无法满足了。
由此,在带宽与可靠性方面更为优异的“升级版”CAN——CAN FD应运而生。
(图1 自动化测试系统)一什么是“一致性测试”一致性测试是用来检测零部件是否符合相关标准的测试流程,可保证产品的质量。
在CAN FD网络中,各节点的质量不一致可能会引发网络故障或网络瘫痪等问题,因此为了保证CAN FD网络的正常安全运行,执行CAN FD的一致性测试非常必要。
二CAN FD一致性测试的标准及内容如果要对CAN FD网络进行一致性测试,就需遵循以下测试标准。
一致性测试标准:•ISO 11898;•ISO 16845;•ISO 15765;•整车厂标准。
根据以上的测试标准,可将CAN FD一致性测试内容分为:•物理层一致性测试;•数据链路层一致性测试;•应用层一致性测试。
| 物理层一致性测试物理层一致性测试主要是对CAN FD网络节点的电阻特性、电容特性和总线终端电阻以及CAN FD物理电平值等的测试,旨在验证CAN FD节点与系统在电路设计、物理电平和容错性方面的性能。
CAN FD物理层一致性测试的内容如下表所示(节选):(图2 CAN FD物理层一致性测试的内容)测试项——终端电阻测试:在CAN FD网络中,需确保电缆的阻抗保持连续性,如此才能有效消除在通信电缆中的信号反射。
因此,在设计网络拓扑结构的过程中,CAN FD总线末端会接120Ω的终端电阻,以此来抑制反射。
终端电阻的阻值必须在ISO 11898标准所规定的118~132Ω范围内。
过大过小的阻值都会对CAN FD通信产生不利影响——阻值过小,会造成信号幅值偏小,从而影响信号识别,通信极不稳定;阻值过大,造成信号幅值偏大,出现信号过冲现象,导致信号下降沿(变缓)时间变长,从而产生位(宽度)识别错误。
adas测试用例方法

adas测试用例方法引言自动驾驶辅助系统(ADAS)是现代汽车中的重要组成部分,它利用传感器和算法来辅助驾驶员进行安全驾驶。
ADAS测试是确保自动驾驶辅助系统稳定正常工作的重要环节。
本文将介绍一些常用的ADAS测试用例方法,以帮助开发人员设计和测试自动驾驶辅助系统。
二级标题1:传感器测试传感器是ADAS系统的核心组成部分,包括摄像头、雷达和激光雷达等。
下面是一些常见的传感器测试用例方法:三级标题1:传感器定标测试1.测试摄像头的分辨率和畸变:通过放置特定模式的标定板测试摄像头的分辨率和畸变情况。
2.测试雷达的探测范围和分辨率:使用不同距离和速度的目标物体进行测试,以评估雷达的探测范围和分辨率。
3.测试激光雷达的角度测量误差:通过将激光雷达安装在旋转平台上,测试其角度测量的误差情况。
三级标题2:传感器故障测试1.模拟摄像头故障:关闭或模拟摄像头的故障情况,如图像模糊或摄像头无法工作,以测试ADAS系统的可靠性。
2.模拟雷达信号干扰:在雷达传感器周围放置电磁干扰源,以模拟雷达信号受干扰的情况,测试ADAS系统对干扰的适应能力。
3.模拟激光雷达故障:关闭或模拟激光雷达的故障情况,如激光测距失败或激光束发散,以测试ADAS系统的容错性。
二级标题2:算法测试ADAS系统中的算法主要负责传感器数据的处理和决策。
以下是一些常见的算法测试用例方法:三级标题1:目标检测与跟踪测试1.测试目标检测算法的准确性:使用不同类型和尺寸的目标物体进行测试,评估目标检测算法的识别准确率和误检率。
2.测试目标跟踪算法的鲁棒性:在目标跟踪过程中模拟目标遮挡或突然消失的情况,测试算法的鲁棒性和恢复能力。
三级标题2:路径规划与控制测试1.测试路径规划算法的准确性:使用不同地理环境和障碍物场景进行测试,评估路径规划算法的路径选择准确性和安全性。
2.测试控制算法的稳定性和响应性:在不同车辆速度和路况下进行测试,评估控制算法对输入的稳定性和响应速度。
adas实验报告
adas实验报告ADAS实验报告引言自动驾驶辅助系统(ADAS)作为一项新兴技术,正在引起越来越多的关注。
本实验旨在探索ADAS在车辆安全性和驾驶体验方面的潜力,并评估其在现实道路环境中的表现。
实验设计为了评估ADAS系统的性能,我们选择了一辆配备了最新ADAS技术的汽车进行测试。
实验过程中,我们设置了不同的道路场景,包括高速公路、城市道路和山区道路,以模拟真实驾驶环境。
我们还采集了大量的数据,包括车辆行驶速度、距离、制动反应时间等,以便对ADAS系统进行全面的分析。
实验结果经过一系列测试,我们得出了以下结论:1. 车辆安全性提升ADAS系统通过使用传感器和相机来监测周围环境,能够实时检测到潜在的危险情况。
例如,当车辆前方突然出现障碍物时,ADAS系统能够及时发出警报并采取制动措施,从而大大减少了事故的发生概率。
此外,ADAS系统还能够帮助驾驶员保持车道,避免疲劳驾驶和不必要的变道,进一步提高了行车安全性。
2. 驾驶体验改善ADAS系统的引入使驾驶过程更加轻松和舒适。
例如,在拥堵的城市道路上,ADAS系统可以自动控制车辆的速度和距离,减少了驾驶员的压力和疲劳。
此外,ADAS系统还提供了自适应巡航控制功能,可以根据前车的速度自动调整车辆的速度,使驾驶过程更加平稳。
3. 技术挑战和改进空间尽管ADAS系统在提高车辆安全性和驾驶体验方面取得了显著进展,但仍然存在一些挑战和改进的空间。
首先,ADAS系统对于复杂的道路环境和极端天气条件的适应性还有待提高。
其次,ADAS系统的准确性和响应时间也需要进一步优化,以确保驾驶员在关键时刻能够及时采取行动。
结论ADAS系统作为一项新兴技术,具有巨大的潜力来提高车辆安全性和驾驶体验。
本实验通过对ADAS系统在不同道路场景下的测试,验证了其在车辆安全性和驾驶体验方面的优势。
然而,我们也应该意识到ADAS技术仍然处于不断发展和完善的阶段,需要不断的研究和改进,以满足日益增长的安全和便利性需求。
BMS测试方案-风丘科技

Project
支持Matlab/Simulink模型 X-Manager负责配置、编译、下载
Tester
X-Handler 可配置的测试工具
Automation Test
Mx-Suite 测试系统管理工具 支持基于LabVIEW 搭建图形化界面 扩展FIU测试 - WIND HILL FIU 扩展MCD测试 - MCD ToolBox & Softing DTS
Mx-Suite ECU-TEST
FIU
MCD
CLIB Client
TCP/IP
Target Plant Model CLIB Server
Linux OS IPC(PCI/PXI/CPCI) DUT
© 2016 北京风丘科技有限公司
8
特点
HOST - Target 架构
Windows OS – Linux OS (千兆LAN)
32bit 80MHz 16bit
WH2101
WH2102
80*AI
6*PWM_IN 2*PWM_IN (4*PWM_OUT) 16*AO
0~60V 0.5%
0~60V
WH1103
16*AO
WH2103
±12V/20mA
© 2016 北京风丘科技有限公司
5
通信&FIU板卡
通信板卡 WH2100 WH2101 WH2102 通道数量 2*HS_CAN 1*HS_CAN 1*LS_CAN 2*HS_CAN 1*LIN 主要参数
24通道故障注入模块 每通道电流500mA RS485和高速CAN总线通信 600V 通道对通道或通道对地隔离 可级连至120通道
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAS驾驶辅助系统测试方案
随着ADAS驾驶辅助系统技术的快速发展以及在技术上的日臻成熟,ADAS在全球汽车市场近年来已开始快速普及和商业化,如何确保ADAS系统的可靠和安全已成为汽车领域的重要问题,因而ADAS驾驶辅助系统的测试也成为了各大整车厂及零部件厂商关注的热点。
ADAS的架构包括激光雷达、照相机、GPS等传感器、俯视的控制ECU以及传感器融合ECU。
ADAS驾驶辅助系统的作用就在于将雷达、摄像头等传感器的数据与汽车本身的动力学参数等数据进行融合及运算分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
对于ADAS驾驶辅助系统的测试而言,需要做的就是把这些数据记录下来,然后进行处理,进而纠正控制策略。
ADAS测试面临的挑战:
以Google智能汽车简图为例,它包含64束的激光雷达、车载雷达、2个照相机、2个红外照相机、GPS定位装置等传感器。
在进行ADAS驾驶辅助系统测试时,首先就需要将所有的这些数据记录下来,从而对测试带来了如下挑战:
1)融合各种传感器数据,如图像、雷达;
2)采集数据量大,高达4T/天。
风丘科技与众多整车厂及零部件客户做过计算,大致1天需要记录存储大约4T的数据,一般的设备很难记录下来,而且对数据存储的时间有很高的要求;
3)不同车辆上的数据采集同步。
在做一些测试的时候,如ACC跟车,需要在2台车上进行同步采集;
4)车辆状态采集。
如车辆的加减速度等;
5)高精度的GPS;
风丘科技的ADAS测试方案:
为了解决ADAS测试面临的以上问题,风丘科技携手德国IPETRONIK共同推出如下方案:
1、德国CAETEC品牌ARCOS记录仪:支持GPRS、以太网、USB等。
车上的摄像头可直接连
接ARCOS,从而采集数据。
2、对于激光雷达和毫米波雷达,可通过CAN协议采集数据。
3、高精度的GPS:对GPS进行标定,目前已达到2cm的精度。
4、传统的数据采集:M-sense、M-CNT模块以及传感器;也可以通过总线如CAN总线、LIN
总线等在车辆上进行数据采集。
所有的数据都可以存储在记录仪里面。
车间的同步采集:
采用2个IPEhubub(WIFI无线通信模块,支持每个模块2个CAN通道);通过WIFI可将它们桥接在一起,可同时对2台车上的设备进行融合。
同理,也可以在每台车上增加数采设备,或者在CAN网络上采集数据。
最后将所有的数据统一存储。
对于ADAS测试ARCOS所做的改进:
ARCOS 1.5 装备DriveBay 用于ADAS应用
1)通过RAID操作实现大容量数据存储
2)安全地存储大容量数据(支持所有常用数据格式,
如BLF, AVI, WAV, MDF4.0, MDF4.1, ASC, ATFX, PCAP 等)
3)热插拔‒ 在工作期间更换硬盘
4)数据传输速率高达12GB/minute。