第八章 非机动车模型
非道路车辆全向电动底盘四轮差速转向模型

非道路车辆全向电动底盘四轮差速转向模型朱振华;吕琼莹;王一凡;丁洪韬【摘要】提出的全向电动底盘可以实现四轮独立驱动和独立转向.在Akermann-Jeantand两轮转向模型的基础上,对全向电动底盘四轮差速转向数学模型进行了研究.建立了四轮差速转向过程中四个车轮之间的角度关系和速度关系,解决了全向电动底盘四轮差速控制过程中的关键问题.利用所建立的四轮差速转向数学模型可实现全向电动底盘的四轮差速转向控制.由四轮差速转向模型可以看出,四轮差速转向逆相控制模式可使转弯半径减小一半,这对于提高全向电动底盘的灵活性和操控性具有非常重要的意义.%Omnidirectional electric chassis has such functions as four wheel independent driving and steering. In the ba-sis of Akermann-Jeantand's two wheel steering model,four wheel differential steeringmathematical model for omnidirec-tional electric chassis is studied. The relationships of angle and speed among the four wheels are established which solves the key issues in the process of differential steering control for four wheels. By use of the four wheel differential steering mathematical model, the differential steering control for four wheels of omnidirectional electric chassis can be realized.It is obviously that the four wheel differential and inverse phase steering mode can make the turning radius re-duce by half,which is very important to improve the flexibility and controllability of omnidirectional electric chassis.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2015(038)005【总页数】5页(P48-52)【关键词】全向电动底盘;四轮差速转向;数学模型;转向控制【作者】朱振华;吕琼莹;王一凡;丁洪韬【作者单位】长春理工大学机电工程学院,长春 130022;长春理工大学机电工程学院,长春 130022;中国科学院长春光学精密机械与物理研究所,长春 130022;爱荷华大学,爱荷华州 52240【正文语种】中文【中图分类】U273非道路车辆也称非道路行走式机械,如装载机、挖掘机、叉车等。
专题08 水平面内的圆周运动模型---2024届新课标高中物理模型与方法(解析版)
2024版新课标高中物理模型与方法专题08水平面内的圆周运动模型目录【模型一】圆锥摆、圆锥斗、圆碗模型 (1)【模型二】火车转弯模型 (13)【模型三】水平路面转弯模型 (19)【模型四】圆盘模型 (27)越大,则摆线的拉力越大,向心力越大,向心加速度也越大,转结论是:在同一地点,摆球的质量相等、摆长不等但高度相同的圆锥摆,转动的快慢相等,但锥摆,摆线的拉力大,向心力大,向心加速度大,运动得快。
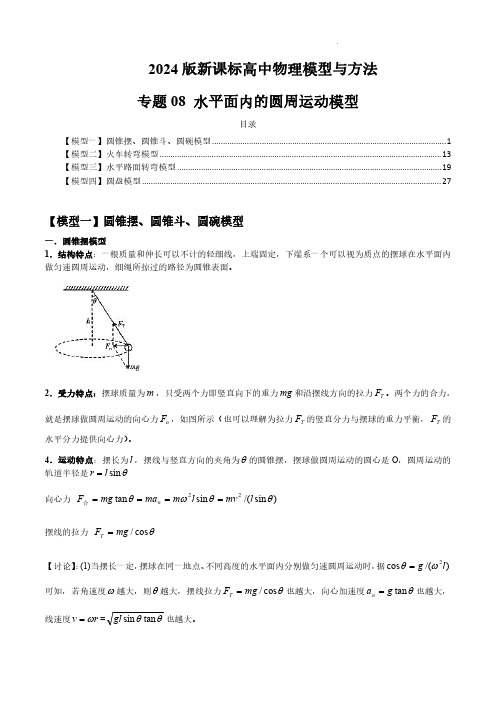
4.多绳圆锥摆问题二.圆锥斗1.结构特点:内壁为圆锥的锥面,光滑,轴线垂直于水平面且固定不动,可视为质点的小球紧贴着内壁在图中所示的水平面内做匀速圆周运动。
2.受力特点:小球质量为m,受两个力即竖直向下的重力mg和垂直内壁沿斜向上方向的支持力N F。
两个力的合力,就是摆球做圆周运动的向心力结论是:在同一地点,同一锥形斗内在不同高度的水平面内做匀速圆周运动的同一小球,支持力大小相等,向心力大小相等,向心加速度大小相等,若高度越高,则转动的越慢,而运动的越快。
三.圆碗受力分析运动分析正交分解x 轴指向心列方程求解规律mgθRF N x :F N sinθ=mω2r y :F N cosθ=mg r =RsinθAB Ca n =gtanθ;①同角同向心加速度(B 和C )②同高同角速度(A 和C )【模型演练1】.(2023·福建厦门·厦门外国语学校校考模拟预测)智能呼啦圈轻便美观,深受大众喜爱。
如图甲,腰带外侧带有轨道,将带有滑轮的短杆穿入轨道,短杆的另一端悬挂一根带有配重的轻绳,其简化模型如图乙所示。
可视为质点的配重质量为0.5kg ,绳长为0.5m ,悬挂点P 到腰带中心点O 的距离为0.2m 。
水平固定好腰带,通过人体微小扭动,使配重随短杆做水平匀速圆周运动,绳子与竖直方向夹角为θ,运动过程中腰带可看作不动,重力加速度g 取210m /s ,sin370.6= ,下列说法正确的是()A .匀速转动时,配重受到的合力恒定不变B .若增大转速,腰带受到的合力不变C .当θ稳定在37︒时,配重的角速度为15rad /s ω=D .当θ由37︒缓慢增加到53︒的过程中,绳子对配重做正功【答案】CD【详解】A .匀速转动时,配重做匀速圆周运动,合力大小不变,但方向在变化,故A 错误;B .运动过程中腰带可看作不动,所以腰带合力始终为零,故B 错误;C .对配重,由牛顿第二定律2tan sin mg m l r θωθ=+()即A.甲容器中A球的线速度比B球大B.乙容器中C.丙容器中两球角速度大小相等D.丙容器中【答案】ABC【详解】A.设容器对小球弹力方向与竖直方向夹角为A.球A和球B的向心加速度大小分别为B.两球所受漏斗支持力大小之比与其所受向心力大小之比相等C.球A和球B的线速度大小之比为D.从图示时刻开始,球B旋转两周与球【答案】BD的半球形陶罐,固定在可以绕竖A.向心力大小为mRω2B.θ越小则ω越小C.在保持物块位置不变的情况下增大D.在保持物块位置不变的情况下增大【答案】BC由受力图可得解得由此可知θ越小则ω越小,故B正确;水平方向竖直方向可知增大角速度,陶罐对小物块的弹力增大,故故选BC。
五年级科学下册“研究与实践”专题一制作车辆模型课件
材料准备阶段
选择材料
选择适合制作车辆模型的材料, 如塑料、金属、木材等。
准备工具
准备必要的工具,如剪刀、胶水 、螺丝刀等。
采购零部件
根据设计需要,采购车辆模型的 零部件,如车轮、车灯、座椅等
。
制作阶段
01
02
03
04
制作车身
按照草图制作车身,注意细节 的刻画。
安装车轮
将车轮安装在车辆模型上,确 保车轮能够灵活转动。
部分学生在制作过程中,对一些科学实验技能掌握不够熟练,需要进一步加强指导和练习 。
改进方向
在未来的课程中,可以增加一些更加具有挑战性和趣味性的内容,激发学生的兴趣和创造 力。同时,也可以加强对学生制作过程的指导和监督,确保他们能够更好地掌握科学实验 技能和方法。
THANKS
感谢观看
包括切割工具(如剪刀、刀具) 、打磨工具(如砂纸、砂轮)、 粘合工具(如胶水、胶带)等。
03
制作车辆模型步骤与方法
设计阶段
确定设计理念
确定车辆模型的设计理念,如未 来风格、复古风格等。
绘制草图
在纸上绘制车辆模型的草图,包括 车身、车轮、车窗等部分。
确定比例
根据实际车辆的比例,确定模型的 比例尺。
科学原理
通过制作车辆模型,学生 可以了解车辆的基本构造 和科学原理,如力学、材 料科学等。
实践操作
学生将亲自动手制作车辆 模型,培养实践能力和动 手能力。
课程目标
知识目标
学生将了解车辆的基本构 造和科学原理,包括车辆 的动力系统、传动系统、 悬挂系统等。
能力目标
学生将掌握简单的车辆模 型制作技能,能够独立完 成一个简单的车辆模型。
汽车制造
交通规划 第八章分配交通量
5
一、基本概念
交通阻抗 阻抗:路段上或节点处的运行时间或广义费用 路阻函数:交通阻抗与交通量的关系 路段上:流量与行驶时间的关系 节点处:交叉口的负荷与延误的关系 路段阻抗: 轨道交通:阻抗与客流量无关 (flow independent) 道路:阻抗与交通量曲线关系 (flow dependent) Q-V特性 或 路阻函数
q1
0
t1 ( )d t2 ( )d min
0
q2
E
s. t. q1 q2 q, q1 0, q2 0
q1
q2
21
三、平衡分配方法
Beckmann交通平衡模型:
min Z ( x) t a ( )d
xa a 0
各路段阻抗函数积分和最小化 交通流守恒:
19
三、平衡分配方法
c1 min(c1 , c2 ) c1 min(c1 , c2 )
if f1 0 if f1 0
c2 min(c1 , c2 ) c2 min(c1 , c2 )
if f k 0 if f k 0
if f 2 0 if f 2 0
f 2 100 f1
解联立方程 c1 c2 5 0.1 f1 (10 0.025f 2 ) 5 0.1 f1 [10 0.025(100 f1 )] 0.125f1 7.5 因为 c1 c2 ,即 c1 c2 0 ,
c1 c2 11 所以 f1 60 ,f 2 40 ,
9
一、基本概念
最短路径算法:Dijkstra法 初始化:给起点标上P标号0,其他节点标上T标号∞。 重复以下步骤,直到全部节点都得到P标号 →从刚得到P标号的节点出发,计算P标号与相连路段阻 抗之和,作为相邻节点的T标号备选; →如果备选T标号小于节点原有的T标号,则以备选T标 (s,5) 号作为该节点的T标号; a →对T标号最小的节点,将其 (s,0) (d,10) T标号定为P标号。 (s,4) b →需辨识最短路径时,P标号 中应附带路径信息。 c 最短路径辨识:按P标号及其路 d (s,2) 径信息,从终点反推。 (b,6)
考虑鸣笛效应的混合非机动车建模及仿真

考虑鸣笛效应的混合非机动车建模及仿真
鸣笛效应是指非机动车在交通中发出声响,以引起机动车司机的注意和警示,避免发生交通事故。
在城市交通环境中,非机动车数量庞大,与机动车共同使用道路。
由于非机动车的速度较慢且无法与机动车保持同步行驶,容易造成事故。
针对这一问题,我们需要建立一个混合非机动车的建模及仿真模型。
我们需要考虑的是非机动车的行为模型。
非机动车包括自行车、电动滑板车、电动自行车等,它们的行为模式有所不同。
在建模时,我们需要考虑非机动车的加速度、减速度、最大速度等参数,并且结合交通规则,如停车、左转、右转等行为进行建模。
我们需要考虑非机动车与机动车之间的交互模型。
由于非机动车速度较慢,与机动车相比,容易被机动车忽视或未及时察觉。
非机动车需要发出声光信号以引起机动车司机的注意。
我们可以模拟非机动车发出声光信号的方式,如鸣笛、使用闪光灯等。
我们还需要考虑机动车司机对非机动车信号的反应,如刹车、减速等行为。
我们需要将上述模型进行仿真。
通过仿真,我们可以观察非机动车和机动车之间的交互情况,分析非机动车发出信号对机动车司机行为的影响。
通过调整非机动车的行为模型和信号发出方式,我们可以评估不同策略对交通流量、通行效率和交通事故率的影响。
考虑鸣笛效应的混合非机动车建模及仿真是一个复杂而有挑战的问题。
通过建立行为模型和交互模型,并进行仿真分析,我们可以研究非机动车行为与机动车之间的关系,以提高城市交通的安全性和效率。
考虑鸣笛效应的混合非机动车建模及仿真

考虑鸣笛效应的混合非机动车建模及仿真鸣笛效应(Horn Effect)指的是在道路上,当机动车司机鸣笛要求非机动车让道时,由于鸣笛的声音和噪音会对非机动车骑士造成不良的心理和生理影响,从而导致不规范的行为或者造成交通事故的发生。
为了减少鸣笛效应对非机动车骑士的负面影响,需要对鸣笛效应进行建模和仿真研究。
混合非机动车指的是同时存在于道路上的自行车和电动自行车等非机动车辆。
他们在道路上的行驶速度较慢,对于机动车来说是比较容易避让的。
但是在一些特殊情况下,机动车司机会通过鸣笛来提醒非机动车让道,从而引发鸣笛效应。
需要对混合非机动车的行为进行建模,以模拟和分析鸣笛效应的影响。
混合非机动车的行为建模可以基于交通流理论和行为模型。
可以通过建立非机动车的运动方程,包括速度、加速度等变量,来描述非机动车在道路上的运动。
同时还需要考虑非机动车与机动车之间的交互作用,如非机动车的行驶轨迹与机动车相交时的冲突情况等。
仿真研究可以通过改变不同的参数,如鸣笛时间、鸣笛音量等,来比较不同情况下的鸣笛效应对非机动车的影响。
可以分析非机动车因鸣笛而导致的行为变化,如频繁变道、加速或减速等,以及与此相关的交通事故发生概率。
通过混合非机动车建模及仿真研究,可以帮助交通管理者和交通规划者更好地了解鸣笛效应对非机动车的影响,并采取相应的措施来降低鸣笛效应对非机动车骑士的负面影响。
可以在交通规划中考虑非机动车通行的安全和流畅,设置合适的非机动车专用道和交通信号等。
也可以提醒机动车司机在鸣笛时注意音量的大小和频率,以减少对非机动车的不良影响。
交通规划-第八章分配交通量概要
14
二、非平衡分配方法
全有全无分配法(All-or-nothing Assignment Method) 不考虑交通量对路阻的影响,取路阻为常数。 分配思路:把OD交通量全部(all)分配到该OD对的最短 路径上,其余路径不分配任何交通量(nothing) 计算步骤 初始化,求出自由流状态下所有路段的阻抗; 计算各OD之间的最短路径; 将OD交通量全部分配到相应的最短径路上。 其他分配方法的基本子程序 每次改变路段上的交通量后,重新计算路段阻抗和最 短路径,(对一定的OD交通量)反复进行全有全无分配
q1
q2
21
三、平衡分配方法
Beckmann交通平衡模型:
min Z(x)
xa 0
ta
(
)d
a
subject to
k
f
rs k
qrs
f
rs k
0
各路段阻抗函数积分和最小化
交通流守恒:
各路径交通量之和等于OD交通量
路径流量非负
其中,路段交通量 xa
f rs rs k a,k
r sk
18
三、平衡分配方法
c1=5+0.1f1 q=f1+f2=100辆
路径1
用户平衡的模型化
c2=10+0.025f2
路径2
Wardrop第一原理:同一OD对间所有被利用路径的旅 行时间相等,且不大于其他未被利用路径的旅行时间
平衡条件
c1 min(c1, c2 ) c1 min(c1, c2 )
15
二、非平衡分配方法
增量分配法(Incremental Assignment Method) 考虑交通量对路阻的影响。 分配思路:逐次分配部分OD交通量,根据路网流动状 况,决定下次分配的最短路径 将OD表分为若干个份(等分或不等分),每次分配一份 每份OD表分配前,重新计算路网上各路段的阻抗和 各OD对的最短径路 每份OD表均按全有全无法分配到相应的最短路径上
简易电动模型赛车

简易电动模型赛车这辆简易电动模型赛车,只有一个底盘,三个车轮,用一台玩具电动机(131 或 151 型)做动力。
它没有外壳,而且用电动机直接驱动,所以重量轻,受的阻力小,速度快,有较好的竞速性能。
底盘是一根长 160 毫米、宽 15毫米、厚8毫米的木条。
木条前端有一个安放前轮的长方孔,两侧有装置前轮轴承的小孔。
木条中部钻有四个装置电池卡的小孔。
木条后端有两个装>置电动机卡圈的孔。
两个前轮轴承、两个电池卡和电动机的卡圈全用薄铁片做成,并钻有小孔。
三个车轮用厚4毫米的塑料板或木板做成,半径为17.5毫米。
要求车轮一定要圆,而且轴孔必须居中,不然赛车跑起来就会颠簸,七弯八拐,跑不成直线。
前轮轴是一根直径1-2 毫米、长15毫米的硬钻丝。
两个后轮直接装在电动机的轴上,但是轴的两端伸出电动机的长短不一样,还要稍作改动。
方法是,将电动机的两个接线片,向外弯成直角,把端盖朝下放在有小孔的砧垫上,将轴端插进>小孔,用小锤轻轻地敲打轴的上端,直到轴从端盖伸出6毫米左右为止。
然后,把两个后轮紧紧地装置在轴的两端。
用10 套螺栓螺帽,把前轮和轴承装在底盘前端;把两个电池卡装在底盘中部;先把卡圈套在电动机上,再用螺栓和螺帽把卡圈固定在底尾端。
然后,用两段软导线将电动机的两个接线片分别和两个电池卡连接起来。
最后,把1节5号电池装进电池卡,后轮便会向前旋转。
如果后轮反转,只要将电池掉过头来,重新装进电池卡就行了。
为了防止电池松脱,可以用细绳或橡皮筋把它捆在底盘上。
刚做成的赛车跑起来可能有毛病,需要仔细调整。
调整时,光调车轴,前后轮轴要相互平行,并与底盘中线相垂直;前后轮也必须同轴相垂直。
前轮在长方孔里应能灵活转动,既不左右摇晃,又没有一点儿碰蹭。
试车地面要平整、干净,不然赛车跑起来碰到坑坑洼洼或者小砂子,便会拐弯飞奔出去。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8.3 自行车二维微观行为运动模型
由于B0与B2、B3是纵向错开的不在同一车道上,所以在计算纵向
影响系数ω时只考虑横向Y轴的坐标,不用考虑纵向X轴的坐标。
自行车纵向行驶时的速度模型:
8.3 自行车二维微观行为运动模型
为Bicycle,点击“新建”,
在弹出的对话框中进行相
新建
关设置,如图8-7所示。设
置完成后点击确定,完成 车辆类型的编辑。 图8-6 车辆构成设置对话框
8.5
VISSIM软件中自行车模型
图8-7 车辆类型对话框
8.5
VISSIM软件中自行车模型
二、创建自行车仿真
① 创建基本路段。单击左侧工 具栏“路段&连接器”按钮切
8.4 基于元胞自动机的自行车模型 8.5 VISSIM软件中自行车模型
8.4 基于元胞自动机的自行车模型
单向二维CA自行车模型
参照机动车辆CA交通模型的建立方法,可建立单向二维CA自 行车模型定义如下: 1、元胞尺寸 由于停车时自行车最大停车密度为0.63辆/m2,则平均一辆自
行车占据1.59m2/辆。再根据自行车的物理尺寸:车身长1.9m,宽
0.6m,定义自行车元胞的大小为:长2.0m,宽0.8m的矩形,则每 个元胞面积为1.6m2,符合最小停车密度值。
8.4 基于元胞自动机的自行车模型
2、速度
3、元胞的状态空间 网格的维数按照自行车道的长度和宽度设定,如车道宽度为 x(m),按每条自行车道1m计算,即有x(x为取整后数值)条车道。则元
道路边界
施加影响
建模对象横向运动
8.2 非机动车流中非机动车矢量场模型
矢量场模型最终修正模型:
第8章 非机动车交通模型
8.1 自行车线性跟驰模型
8.2 非机动车流中非机动车矢量场模型
8.3 自行车二维微观行为运动模型
8.4 基于元胞自动机的自行车模型 8.5 VISSIM软件中自行车模型
8.3 自行车二维微观行为运动模型
8.3 自行车二维微观行为运动模型
由于自行车速度惯性小,驾驶比较灵活,并且在交叉口附近的行
驶速度相对比较慢,可以不用考虑前后车的安全车头间距和速度差对 后车速度的影响,所以式(8-9)主要考虑路段上的非机动车建模,而
非交叉口上的自行车建模。
根据实际观测和经验认为0°≤θl≤45°和0°≤θr≤45°范围内 的自行车对B0的行驶行为才有影响。当θl >45°和θr >45°时,即在 B2和B3后边的自行车产生的影响可以不用考虑。由于B4和B5分别在 B3和B2的前方,它们对B0的影响是通过B3和B2的影响来传递的,是 间接的,因此可以不用考虑。
二维微观行为模型
二维微观行为运动模型认为自行车的运动总体上可
以分为两个部分:第一部分是自行车的速度模型,第二
部分是自行车的偏转角度模型。
速度模型
二维微观行为 运动模型
偏转角度模型
8.3 自行车二维微观行为运动模型
一、自行车速度模型
图8-3 自行车二维行为示意图 横 y 向 移 动 方 向
B8
B7 B0
换到路段编辑状态。任意画一
条基本路段,在弹出的“路段 属性”对话框中“名称”设为
非机动车道,“行为类型”一
栏中选择“5:自行车道(随意 超车)”,其他不做任何改动,
如图8-8所示。点击“确定”,
完成路段属性设置。 图8-8 路段属性设置
8.5
VISSIM软件中自行车模型
④ 添加流量。单击左侧工具栏“车辆输入”按钮切换到车辆输入状态下, 结合实验数据为设置好的非机动车道添加流量,类型为“2:Bicycle”
②纵向加速:
③纵向减速:
8.4 基于元胞自动机的自行车模型
④横向速度:
⑤位置移动:
第8章 非机动车交通模型
8.1 自行车线性跟驰模型
8.2 非机动车流中非机动车矢量场模型
8.3 自行车二维微观行为运动模型
8.4 基于元胞自动机的自行车模型 8.5 VISSIM软件中自行车模型
8.5
VISSIM软件中自行车模型
Thank You! 谢谢!
B3
B4
B9
B6
θl B1 θr B2 B5
L(m)
纵向前进方向 B0~B9分别表示某一时刻10辆自行车的位置;
x
θl和θr分别自行车B0最大左转角度和最大右转角度;
8.3 自行车二维微观行为运动模型
以B0为分析建模对象 B0正前方的B1则对B0的行驶速度有负面限制。结合跟驰理论 的思想和以上分析建立自行车的速度模型如下式所示:
二、自行车偏转角度模型
如图8-2所示,影响自行车B0横向移动的有左侧自行车B3和
B7、右侧自行车B2和B6。一般来讲骑车者会根据周围自行车的
情况,选择处在左右两侧自行车的中间地带,这样距左、右两 侧自行车的距离是一样的。所以可以根据实际调查数据,提出
以纵向距离为自变量的横向影响系数h来分析自行车B2、B3、
的非机动车交通流量。
⑤ 运行仿真,观 察仿真效果,其
三维仿真图如图
8-9所示。
图8-9 三维仿真
第8章 非机动车交通模型
思考题:
1、自行车的微观线性模型和非机动车流中非机
动车的矢量场模型的优缺点各是什么?
2、如何利用VISSIM仿真软件进行自行车的微观 仿真? 3、非机动车微观仿真在未来将有哪些发展与进 步空间?
8.3 自行车二维微观行为运动模型
影响自行车转弯偏转角度的因素:自行车密度、骑车人的性 别、年龄、道路情况等。 从图8-2中可知自行车左右转偏转角的大小可用如下两式表示:
8.3 自行车二维微观行为运动模型
第8章 非机动车交通模型
8.1 自行车线性跟驰模型
8.2 非机动车流中非机动车矢量场模型
8.3 自行车二维微观行为运动模型
B6、B7对自行车B0横向移动行为的影响。
8.3 自行车二维微观行为运动模型
以自行车B0右前方的自行车B2为例,其对自行车B0的横向影响
系数h如下式所示:
那么左右两侧对自行车B0横向坐标的影响记为:
8.3 自行车二维微观行为运动模型
则自行车B0在t+1时刻横向坐标的基值为:
修正
考虑自行车的横向偏转角度,通过对式8-14横向坐标基值的进一步 修正,可以求得自行车下一步横向坐标的大小。 正常情况下:y=30° 最大左右偏 转角y 特殊情况下:y为 70°~80°左右
8.3 自行车二维微观行为运动模型
经过以上分析可知,可以只考虑三种情形中自行车位置对B0的影响: 1、正前方的车辆B1;
2、右前方45°范围内的自行车B3;
3、左前方45°范围内的自行车B2。
假设: 1、自行车的平均车长为1.9m,平均车宽为0.6m;
2、行驶时左右摇摆的安全间距各为0.2m。
8.3 自行车二维微观行为运动模型
第8章 非机动车交通模型
第8章 非机动车交通模型
教学目的:掌握非机动车的线性跟驰模型和矢量场模 型,了解二维微观行为运动模型和元胞自动机模型。 掌握在VISSIM中设置自行车仿真的基本方法,能够标 定自行车仿真中的基本参数。 教学重点: (1)线性跟驰模型。 (2)矢量场模型。 (3)VISSIM仿真 教学难点: (1)线性跟驰模型。 (2)矢量场模型。
矢量场模型
基本原理:
假设在所考察的建模对象周围存在一个由其周围运动 物体与之相互作用形成的矢量场,建模对象的速度变化是 它在矢量场中受到其它运动物体以及道路状况相互作用的 结果。
车辆的运动特性
相互作用
人们的心理特性
8.2 非机动车流中非机动车矢量场模型
基于矢量场的非机动车运动示意图
8.2 非机动车流中非机动车矢量场模型
第8章 非机动车交通模型
8.1 自行车线性跟驰模型
8.2 非机动车流中非机动车矢量场模型
8.3 自行车二维微观行为运动模型
8.4 基于元胞自动机的自行车模型 8.5 VISSIM软件中自行车模型
8.1 自行车线性跟驰模型
一、引言
通过借鉴机动车跟驰模型,可建立自行车运
动的基本模型,即线性跟驰模型。
机动车向量场模型
改进
非机动车向量场模型
(8-3)
8.2 非机动车流中非机动车矢量场模型
非机动车向量场模型
敏感系数 • 不是常数,与相互作用的车辆之间的距离成反比
加速影响
Var ( X ) np(1 p) • 与车辆自身的当前速度与理想速度的比值有关
减速影响 • 与被阻碍车辆的理想速度和阻碍车辆的当前速度的 比值成正相关关系
8.1 自行车线性跟驰模型
根据实验数据对自行车的跟驰数据进行拟合,得到如 下公式:
第8章 非机动车交通模型
8.1 自行车线性跟驰模型
8.2 非机动车流中非机动车矢量场模型
8.3 自行车二维微观行为运动模型
8.4 基于元胞自动机的自行车模型 Hale Waihona Puke .5 VISSIM软件中自行车模型
8.2 非机动车流中非机动车矢量场模型
5、元胞的邻域
图8-4中深色的元胞代表当前元胞,定义其邻域为周围浅灰色的
部分,对应着纵向最大速度4个元胞长度和横向最大速度2个元胞宽度。
8.4 基于元胞自动机的自行车模型
6、模型的局部规则
有关当前元胞的假设:
8.4 基于元胞自动机的自行车模型
当前自行车元胞演变规则如下:
①纵向加减速规则判断:
8.4 基于元胞自动机的自行车模型
8.2 非机动车流中非机动车矢量场模型
8.2 非机动车流中非机动车矢量场模型