齿轮动力学
机械齿轮传动系统的动力学分析与优化

机械齿轮传动系统的动力学分析与优化齿轮传动是一种常见的动力传递机构,具有传递力矩大、传动效率高等优点,在工业生产中得到广泛应用。
但是,由于齿轮传动系统存在着一些固有的问题,如齿轮啮合时的振动和噪音、齿面磨损等,因此对其进行动力学分析和优化是非常重要的。
1. 动力学分析1.1 齿轮啮合的动力学模型齿轮啮合过程中,齿轮之间存在着瞬时的压力、速度和加速度变化。
可以通过建立齿轮啮合的动力学模型来分析其动态特性。
常用的方法包括等效单齿转动法和有限元法。
通过分析齿轮齿面接触应力和应力分布,可以预测系统的振动和噪音水平,为后续的优化提供依据。
1.2 动力学参数的测量和计算为了进行动力学分析,需要测量和计算一些关键参数,如齿轮的啮合刚度、传递误差、滚子轴承的刚度等。
其中,传递误差是影响齿轮传动系统性能的重要因素之一,其大小与齿轮加工质量、啮合配合、齿轮轴向和径向跳动等因素有关。
通过合理的测量方法和计算模型,可以准确地获取这些参数,并对系统进行分析。
2. 动力学优化2.1 齿轮传动系统的振动和噪音控制由于齿轮啮合时的动态特性,齿轮传动系统常常会产生振动和噪音。
为了减小振动和噪音的水平,可以从多个方面进行优化,如合理设计齿形、减小啮合间隙、提高齿轮加工精度等。
此外,也可以采用减振装置,如弹性联轴器、减震器等,来降低系统的振动能量传递。
2.2 传动效率的提高传动效率是衡量齿轮传动系统性能的重要指标之一。
为了提高传动效率,可以从减小传动误差、改善齿轮表面质量、减小传动间隙等方面入手。
此外,合理选择润滑方式和润滑油,也可以有效地降低系统的摩擦和磨损,提高传动效率。
2.3 齿轮传动系统的寿命预测齿轮传动系统的寿命是评估其使用寿命和可靠性的重要指标。
通过综合考虑齿轮的强度、疲劳寿命和磨损等影响因素,可以建立寿命预测模型,对系统进行寿命预测和优化设计。
此外,还可以通过监测齿轮的工作状态和健康状况,进行实时的故障诊断和维护。
3. 总结齿轮传动系统的动力学分析和优化是提高其性能和可靠性的重要手段。
齿轮啮合刚度及齿轮动力学
THANKS
谢谢您的观看
。
边界元法具有较高的计算精度和效率, 适用于求解复杂几何形状和多种材料组
成的齿轮系统的动态响应问题。
有限差分法
在齿轮动力学分析中,有限差分法可以用于模拟齿轮 系统的动态响应和振动问题。
单击此处添加正文,文字是您思想的提一一二三四五 六七八九一二三四五六七八九一二三四五六七八九文 ,单击此处添加正文,文字是您思想的提炼,为了最 终呈现发布的良好效果单击此4*25}
03
齿轮动力学模型
一维模型
描述
一维模型假设齿轮在接触线上的变形是唯一的变形形式,忽略了 齿面摩擦和齿根弯曲变形的影响。
优点
计算简单,适用于初步设计和分析。
缺点
与实际情况存在较大误差,不能准确反映齿轮动态性能。
二维模型
描述
二维模型考虑了齿面摩擦和齿根 弯曲变形的影响,但仍忽略了齿 面接触变形和齿轮体内部振动。
优化设计的方法
1 2
数学建模
建立设计问题的数学模型,包括目标函数和约束 条件。
数值计算
利用数值计算方法求解数学模型,得到最优解。
3
计算机辅助设计
利用计算机辅助设计软件进行优化设计,提高设 计效率。
齿轮动力学优化设计实例
实例一
01
行星齿轮传动系统的优化设计,提高系统的承载能力和效率。
实例二
02
斜齿轮传动系统的优化设计,减小振动和噪音。
外部激励
如电机、传动轴等外部激 励因素,也可能引起齿轮 振动。
齿轮动力学在工程中的应用
故障诊断
通过分析齿轮振动的频率 、幅值等信息,判断齿轮 的故障类型和位置。
优化设计
利用齿轮动力学理论,优 化齿轮设计,提高齿轮的 动态性能和承载能力。
齿轮传动系统动力学建模

齿轮传动系统动力学建模是一个复杂的过程,需要考虑齿轮的啮合刚度、齿侧间隙、重合度等多种因素。
下面将详细介绍建模过程。
一、齿轮传动系统动力学概述齿轮传动系统是机械传动的重要组成部分,具有高精度、高效率、高可靠性等特点。
然而,齿轮传动过程中,由于齿轮的啮合刚度、齿侧间隙、重合度等多种因素的影响,会产生振动和噪声,严重时会影响传动系统的性能和寿命。
因此,建立齿轮传动系统动力学模型,研究其动态特性,对于优化设计、提高传动系统性能和寿命具有重要意义。
二、齿轮传动系统动力学建模建立模型齿轮传动系统动力学模型包括啮合刚度模型、齿侧间隙模型、重合度模型等。
其中,啮合刚度模型用于描述齿轮在啮合过程中的刚度变化,齿侧间隙模型用于描述齿轮齿侧间隙的大小和分布规律,重合度模型用于描述齿轮的重合度变化。
这些模型可以基于实验和理论分析建立,也可以通过数值模拟得到。
动力学方程根据建立的模型,可以建立齿轮传动系统动力学方程。
该方程通常是一个非线性微分方程组,描述了齿轮在啮合过程中的动态特性。
通过求解这个方程组,可以得到齿轮在不同时刻的位置、速度和加速度等动态响应。
动态特性分析通过分析动力学方程的解,可以研究齿轮传动系统的动态特性。
例如,通过频谱分析可以确定齿轮振动的频率成分和幅值;通过时域分析可以观察齿轮振动的时域波形;通过稳定性分析可以判断系统的稳定性等。
这些分析结果可以为优化设计提供依据。
三、数值模拟方法在建立齿轮传动系统动力学模型时,通常采用数值模拟方法进行求解。
常用的数值模拟方法包括有限元法、有限差分法、边界元法等。
其中,有限元法是一种常用的求解微分方程组的方法,具有适应性强、精度高等优点。
有限差分法是一种将微分方程转化为差分方程组的方法,适用于求解偏微分方程组。
边界元法是一种将边界条件考虑在内的数值模拟方法,适用于求解具有复杂边界条件的微分方程组。
四、实例分析以一个减速器为例,介绍如何建立其动力学模型并进行分析。
该减速器由输入轴、中间轴和输出轴组成,每个轴上安装有直齿圆柱齿轮。
行星齿轮传动系统的动力学建模与分析

行星齿轮传动系统的动力学建模与分析齿轮传动系统是一种常见的机械传动形式,由多个齿轮通过啮合传递动力。
在齿轮传动系统中,行星齿轮传动系统是一种常见的结构。
它由中央太阳齿轮、外圈行星齿轮和内圈行星齿轮组成。
行星齿轮传动系统具有紧凑结构、传动比变化范围广和承载能力强的特点,所以在很多机械传动系统中得到广泛应用。
了解行星齿轮传动系统的动力学特性对于设计和优化机械传动系统具有重要意义。
行星齿轮传动系统的动力学建模是研究其特性的基础。
一般而言,行星齿轮传动系统的动力学研究可以分为两个方面:传动系统的静态行为和传动系统的动态行为。
首先,我们来讨论行星齿轮传动系统的静态行为。
行星齿轮传动系统的静态行为主要包括传动比和齿轮位置分析。
传动比决定了输入轴和输出轴的转速比,对于不同的工况要求,传动比的变化范围也是需要考虑的因素。
齿轮位置分析是指确定各个齿轮之间的相对位置,这对于齿轮的啮合是否合理具有重要影响。
在行星齿轮传动系统的静态行为分析中,可以采用几何法和力学法相结合的方法,来求解传动比和齿轮位置。
几何法主要通过几何关系求解,力学法则涉及到力矩平衡和力平衡,求解过程需要考虑到齿轮的几何关系和曲柄等部件的力学特性。
其次,我们来讨论行星齿轮传动系统的动态行为。
行星齿轮传动系统的动态行为主要包括齿轮振动、齿轮动力学和齿轮传动系统的自激振动分析。
齿轮振动是指齿轮在运动过程中由于齿轮的不平衡、啮合刚度等因素引起的振动。
齿轮动力学是指齿轮在运动过程中由于齿轮的载荷和齿轮啮合行为引起的力学现象。
自激振动是指齿轮传动系统由于齿轮的不均匀磨损、齿轮啮合误差等因素引起的自激振动。
行星齿轮传动系统的动态行为分析需要采用系统动力学和振动理论等方法,通过建立数学模型来求解相应的动力学方程。
对于行星齿轮传动系统的动态行为分析,可以分为线性动力学分析和非线性动力学分析。
线性动力学分析是指在小扰动情况下对齿轮传动系统进行的分析,一般求解线性化的动力学方程来得到系统的频率响应和稳定性。
齿轮系统动力学特性分析与优化设计
齿轮系统动力学特性分析与优化设计一、引言齿轮系统作为机械传动中最常见的一种形式,在工程领域中广泛应用。
其优点在于传动效率高、承载能力强、传动精度高等特点,因此在各种机械设备中都有着重要的地位。
然而,齿轮传动过程中的动力学特性对系统的性能具有直接的影响。
因此,对齿轮系统的动力学特性进行分析与优化设计非常重要。
二、齿轮系统的动力学特性齿轮传动系统的动力学特性主要包括齿轮的振动、动力和动态响应等方面。
首先,齿轮的振动是指齿轮在传动过程中由于受到外界激励而发生的振动现象。
这种振动可能引起噪声和振动,对整个机械系统产生不利影响。
其次,齿轮的动力是指齿轮传递的力矩大小和方向。
传动中的力矩产生与分布不均匀会导致齿轮系统运行不稳定,从而降低传动效率。
最后,齿轮的动态响应是指齿轮在传动过程中对外界激励的响应。
这种响应可能导致齿轮的冲击或滑动,进而加剧齿轮的磨损和故障。
三、齿轮系统动力学特性分析方法为了对齿轮系统的动力学特性进行准确分析,研究人员采用了多种方法。
其中,有限元方法是一种常用的分析方法。
通过对齿轮系统进行离散建模,将连续问题转化为离散问题,并通过数值计算方法求解齿轮系统的动力学响应。
通过有限元分析,可以得到齿轮的振动模态、动力传递特性和动态响应等信息,从而为系统的优化设计提供参考依据。
此外,还有基于试验模态分析的方法和数学模型法等,这些方法都可以辅助分析齿轮系统的动力学特性。
四、齿轮系统动力学特性的优化设计在进行齿轮系统的优化设计时,需要从多个方面考虑,以提高系统的性能和可靠性。
首先,可以通过选用适当的材料和热处理工艺来提高齿轮的强度和硬度,从而增强齿轮的承载能力。
其次,可以采用特殊的齿轮副配置以减小齿轮的振动和噪声。
例如,采用斜齿轮副代替直齿轮副,可以降低噪声和振动,提高传动效率。
此外,还可以通过优化齿轮的几何参数和齿轮副的啮合参数,来改善传动的动力学特性。
通过合理设计齿轮的齿形和啮合角、减小齿轮端面接触弧等方式,可以降低齿轮的冲击和滑动,提高传动效率和可靠性。
齿轮动力学国内外研究现状
1.2.1 齿轮系统动力学研究从齿轮动力学的研究发展来看,先后进行了基于解析方法的非线性齿轮动力学研究、基于数值方法的齿轮非线性动力学研究、基于实验方法的齿轮系统的非线性动力学研究和考虑齿面摩擦及齿轮故障的齿轮系统的非线性动力学研究。
其中,解析方法包括谐波平衡法、分段技术法和增量谐波平衡法等;数值方法则不胜枚举,包括Ritz法、Parametric Continuation Technique方法等。
[1]齿轮系统间隙非线性动力学的研究起始于1967年K.Nakamura的研究。
[2]在1987年,H. Nevzat ?zgüven等人对齿轮系统动力学的数学建模方法进行了详细的总结。
他分别从简化的动力学因子模型、轮齿柔性模型、齿轮动力学模型、扭转振动模型等几个方面分类,详细总述了齿轮动力学的发展进程。
[3]1990年,A. Kaharman等人分析了一对含间隙直齿轮副的非线性动态特性,考虑了啮合刚度、齿侧间隙和静态传递误差等内部激励的影响,考察了啮合刚度与齿侧间隙对动力学的共同影响。
[4] 1997年,Kaharaman和Blankenship对具有时变啮合刚度、齿侧间隙和外部激励的齿轮系统进行了实验研究,利用时域图、频域图、相位图和彭家莱曲线等揭示了齿轮系统的各种非线性现象。
[5]同年,M. Amabili和A. Rivola 研究了低重合度单自由度的直齿轮系统的稳态响应及其系统的稳定性。
[6]2004年,A. Al-shyyab等人用集中质量参数法建立了含齿侧间隙的直齿齿轮副的非线性动力学模型,利用谐波平衡阀求解了方程组的稳态响应,并研究了啮合刚度、啮合阻尼、静态力矩和啮合频率对齿轮系统振动的影响。
[7]2008年,Lassaad Walha等人建立了两级齿轮系统的非线性动力学模型,考虑了时变刚度、齿侧间隙和轴承刚度对动力学的影响。
对非线性系统分段线性化并用Newmark迭代法进行求解,研究了齿轮脱啮造成的齿轮运动的不连续性。
变速器齿轮传动的动力学特性与设计考虑
变速器齿轮传动的动力学特性与设计考虑变速器作为机械传动系统中的重要组成部分,具有调节输出转矩和转速的功能。
而其中的齿轮传动又是变速器的核心部件之一。
本文将针对变速器齿轮传动的动力学特性以及设计时需要考虑的因素进行探讨。
一、动力学特性1.1 齿轮传动的传动比传动比是变速器齿轮传动中的一个重要参数,用于描述输入轴和输出轴之间的转速比。
传动比的大小直接影响到车辆的运动性能和燃油经济性。
通常情况下,高速档的传动比较小,低速档的传动比较大。
1.2 轴向和径向负载在变速器齿轮传动过程中,齿轮承受着来自输入输出轴的轴向和径向负载。
轴向负载主要是来自于发动机的输出转矩和传动系统的摩擦力,而径向负载则包括传动器的自身重量以及运动惯性力等。
设计时需要考虑到这些负载对齿轮的影响,以保证传动可靠性和平稳性。
1.3 齿轮齿形与啮合齿轮的齿形几何结构对于传动性能具有重要影响。
齿轮的齿形主要包括齿高、齿顶高度、齿厚及啮合角等。
优良的齿形设计可以减小齿轮啮合时的摩擦和噪声,提高传动效率和寿命。
二、设计考虑2.1 齿轮材料选择齿轮传动中所使用的材料需要具备良好的机械强度和耐磨性能。
常见的齿轮材料包括低碳合金钢、淬火合金钢、渗碳钢以及高强度合金材料等。
在选择材料时需要综合考虑成本、强度、刚性、耐磨性等因素。
2.2 齿轮的润滑与冷却为了保证变速器齿轮传动的正常运行,必须对齿轮齿面进行良好的润滑。
合适的润滑方式和润滑油的选择可以减少齿轮的摩擦和磨损,并降低传动噪声。
同时,对于高功率变速器,冷却系统的设计也是至关重要的,可以有效降低齿轮传动过程中的温度。
2.3 齿轮的强度计算为了保证齿轮传动的可靠性,需要进行强度计算来确定齿轮的尺寸和齿数。
强度计算通常包括齿轮的疲劳强度和齿面强度两个方面。
其中,疲劳强度主要是考虑到齿轮长时间运转而引起的疲劳变形和断裂,而齿面强度主要是考虑到齿轮传动时所受到的最大接触应力。
2.4 齿轮的噪声与振动齿轮传动过程中会产生一定的噪声和振动。
《2024年齿轮传动系统动力学特性的有限元分析及试验方法研究》范文
《齿轮传动系统动力学特性的有限元分析及试验方法研究》篇一一、引言齿轮传动系统作为机械传动的重要部分,其动力学特性直接影响着整个机械系统的性能和稳定性。
随着现代工业的快速发展,对齿轮传动系统的动力学性能要求越来越高。
因此,研究齿轮传动系统的动力学特性及其有限元分析方法和试验方法具有重要意义。
本文将对齿轮传动系统动力学特性的有限元分析及试验方法进行深入研究,旨在为提高齿轮传动系统的性能和稳定性提供理论依据。
二、齿轮传动系统动力学特性的有限元分析2.1 有限元分析基本原理有限元分析是一种常用的数值分析方法,通过将连续体离散化为有限个单元,并对每个单元进行分析,从而得到整个结构的近似解。
在齿轮传动系统的有限元分析中,首先要建立齿轮传动系统的有限元模型,然后根据实际工作条件设置材料属性、边界条件和载荷等,最后通过求解器进行求解,得到齿轮传动系统的动力学特性。
2.2 齿轮传动系统有限元模型的建立建立齿轮传动系统的有限元模型是进行有限元分析的首要步骤。
在模型建立过程中,需要考虑齿轮的几何形状、材料属性、接触关系等因素。
同时,为了更好地反映齿轮传动系统的实际工作情况,还需要考虑齿轮的制造误差、安装误差等因素对模型的影响。
2.3 动力学特性的有限元分析在建立好齿轮传动系统的有限元模型后,需要根据实际工作条件设置材料属性、边界条件和载荷等。
然后通过求解器进行求解,得到齿轮传动系统的位移、应力、应变等动力学特性。
通过对这些特性的分析,可以了解齿轮传动系统在工作过程中的动态行为和性能表现。
三、试验方法研究3.1 试验设备及方法为了验证有限元分析结果的准确性,需要进行试验验证。
试验设备主要包括齿轮传动系统、传感器、测控系统等。
试验方法主要包括静态试验和动态试验两种。
静态试验主要用于测量齿轮的几何形状、材料属性等参数;动态试验则用于模拟齿轮传动系统在实际工作过程中的动态行为和性能表现。
3.2 试验过程及数据处理在试验过程中,需要按照实际工作条件设置好试验参数,如转速、载荷等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
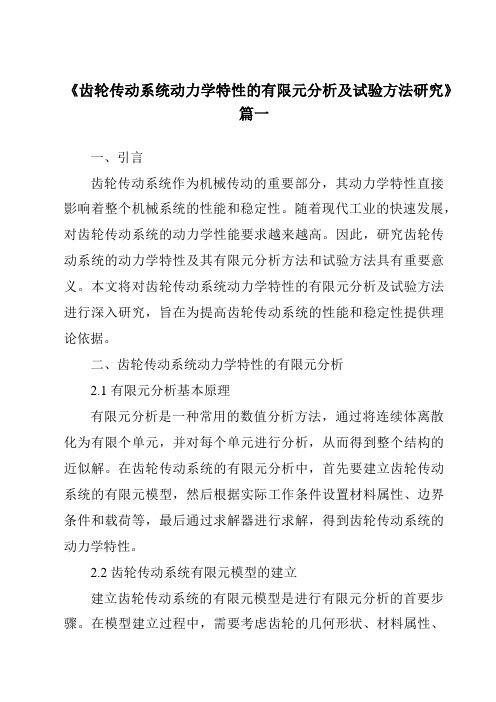
(一) 直齿圆柱齿轮传动的扭转振动模型若忽略传动轴的扭转变形,只考虑齿轮副处的变形,则得到最简单的扭转振动模型,如图1所示。
其中r b1、r b2为主从动齿轮的基圆直径,k v 为齿轮副的综合啮合刚度,并且考虑齿轮副的啮合阻尼系数c v 以及齿廓误差e 的作用,主动轮上作用与转动方向相同的驱动力矩T 1,从动轮上作用与转动方向相反的阻力矩T 2图1 齿轮副的扭转振动模型啮合线上的综合变形δi 可写为:1122i b b i r r e δθθ=--(1)设重合度小于2,啮合齿对为i ,法向啮合力可以表示为:()()()11221122i vi i vi i vi b b i vi b b i i i iF F k c k r r e c r r e δδθθθθ⎡⎤==+=--+--⎣⎦∑∑∑ (2) 式中:i 为参与啮合的齿对序号,i =1,2;k vi 、c vi 为齿对i 在啮合点位置的综合啮合刚度和阻尼系数。
主、从动齿轮的力矩平衡方程为:12111222b b J T r F J T r Fθθ=-=- (3)将(2)带入(1)中得到:()()()()111112211221222112211222b vi b b i vi b b i i b vi b b i vi b b i iJ r k r r e c r r e T J r k r r e c r r e T θθθθθθθθθθ⎡⎤+--+--=⎣⎦⎡⎤---+--=-⎣⎦∑∑ (4)由此式可看出,即使主动齿轮转速以及传动载荷恒定,由于时变综合刚度k v 的变化,也会使从动轮的转动出现波动,即造成齿轮的圆周振动。
为了方便讨论时变综合刚度k v 对振动方程(4)的影响,定义啮合线上两齿轮的相对位移x 为:1122b b x r r θθ=- (5)不考虑齿轮传动的效率,齿轮的静态啮合力为:12012b b T T F r r ==(6)将式(5)、(6)带入方程(4)中,则可将其简化为一元微分方程:e v v d m x c x k x F ++= (7)式中,m e 称为系统的当量质量:12222112e b b J J m J r J r =+ (8)激振力为:0d vi i vi i iiF F c e k e =++∑∑(9)根据方程(9)可以将一对齿轮的振动视为单自由度系统的振动,如图2所示。
可以看出时变综合刚度k v 和齿廓误差e i 都是随时间变化的量,也即是齿轮系统的刚度激励和误差激励。
图2 齿轮传动的单自由度模型与方程(7)对应的系统的固有频率可以表示为:n f == (10)(二) 直齿圆柱齿轮副啮合耦合型振动分析在不考虑齿面摩擦的情况下,典型的直齿圆柱齿轮副的啮合耦合型动力学模型如图4所示。
图4 直齿轮齿轮副耦合振动模型齿轮的动态啮合力F p 为:()()p k c m p g p g g g m p g p g g g F F F k y R y R e c y R y R e θθθθ=+=+-+-++-+-(12)推出系统的分析模型为:p p py p py p p p p P p pg g gy g gy g g p g g g g g p g gm y c y k y F I F R T m y c y k y F F I F R T F R T θθ++=-=--++=-=-=--=-(三) 考虑摩擦直齿圆柱齿轮副啮合耦合型振动分析考虑齿面摩擦时的分析模型,如图5所示。
系统变成6自由度的二维平面振动系统。
图5 考虑齿面摩擦的直齿轮齿轮副振动模型齿轮副的动态啮合力仍为式(12),而齿面摩擦力可近似表示为:f p F fF λ=式中,f 为等效摩擦系数;λ为轮齿摩擦力方向系数,F f 沿x 正方向时取为“+1”,反之取为“-1”。
图6根据图6可建立系统的分析模型为:()()tan tan p p px p px p f p p py p py p pp p P p p f p g g gx g gx g f g g gy g gy g pg g g g g f g m x c x k x F m y c y k y F I F R T F R H m x c x k x F m y c y k y F I F R T F R H θβθβ++=++=-=--+-++=-++==--++(四) 直齿轮-转子系统扭转振动模型在对一对齿轮副建模的基础上,再考虑到传动轴的扭转刚度以及原动机和负载的转动惯量,从而形成了齿轮-转子系统扭转振动问题,其动力学模型如图3所示。
图3 齿轮转子系统扭振模型对该力学模型所示的振动系统,如果不考虑传动轴的质量,将原动机、主被动齿轮和负载可分别处理为4个集中转动惯量的元件,因而是4自由度扭转振动系统,从而建立如下的振动微分方程:()()()()()()()()00101101111111112232332323333233230dd I C K T I C K rT I C K r T I C K Tθθθθθθθθθθθθθθθθθθθθ+-+-=+-+-+=+-+--=+-+-=-式中,I 0、I 1、I 2、I 3分别为4个质量的转动惯量;C 1、C 2分别为主、被动连接轴的扭转阻尼;K 1和K 3分别为主、被动连接轴的扭转刚度;T 1和T 2分别为原动机和负载上的扭矩;F 为轮齿动态啮合力。
根据式(2)可知T d 为:()()11221122d m m T C r r e K r r e θθθθ=--+--整理后可得齿轮转子扭转振动微分方程:[]{}[]{}[]{}{}M C K P θθθ++=其中{}{}0123 Tθθθθθ=[]0123I I M I I ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦[]1121111222132333000000m m mm K K KK K r r r K K r r K K K r K K K -⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎣⎦[]1121111222132333000000mm m mC C C C r Cr r C C r rC C r C C C C -⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎣⎦{}111223m m m m T C re r K e P C r e r K e T ⎧⎫⎪⎪--⎪⎪=⎨⎬+⎪⎪⎪⎪-⎩⎭(五) 斜齿圆柱齿轮副弯—扭—轴耦合分析模型在斜齿圆柱齿轮传动中,由于轮齿的啮合会产生轴向的动态啮合分力,因此系统除具有扭转振动和横向振动外,还好引起轴向振动,从而形成齿轮系统的弯-扭-轴耦合振动,一对斜齿轮副的典型动力学模型如图7所示。
图7如图5.7,设主动齿轮的螺旋角为右旋,螺旋角为β,则啮合点横向振动位移与轴向振动位移间的关系可以表示为:tan z y β=因此,P 、G 点的振动位移与主动轮广义位移间的关系分别为:tan tan p p p p p p p g g g g g g g y y R z z y y y R z z y θβθβ=+=-=-=-已知齿轮啮合的法向刚度k m 、法向阻尼c m 和法向啮合误差e ,则相应的有:sin cos sin cos sin sin mx m my m mz m my m zy k k k k c c c c e c e e ββββββ⎧==⎪==⎨⎪==⎩ 因此,相应的切向动态齿合力F y 为:()()()..cos y myy my y p g p g m p p p g g g y m p p p g g g y F k y y e c y y e k y R y R e c y R y R e βθθθθ⎛⎫=--+-- ⎪⎝⎭⎡⎤=+-+-++-+-⎣⎦轴向动态啮合力F z 为:()()()()()()()..tan tan sin tan tan p g p g z mzz mz z m pp p p g g g g zm p p p p g g g g z F k z z e c z z e k z y R z y R e c z y R z y R e βθβθββθβθ⎛⎫=--+-- ⎪⎝⎭⎧⎫⎡⎤-+-+--⎣⎦⎪⎪=⎨⎬⎡⎤+-+-+--⎪⎪⎣⎦⎩⎭ 可推出系统的分析模型为;p p py p py p y p p pz p pz p z p p y p pg g gy g gy g y g g gz g gz g z g g g g gm y c y k y F m z c z k z F I F R T m y c y k y F m z c z k z F I F R T θθ++=-++==--++=++=-=--(六) 斜齿圆柱齿轮副弯—扭—轴—摆耦合分析模型在斜齿圆柱齿轮传动中,由于轮齿的啮合会产生轴向的动态啮合力,因此系统除具有扭转和横向振动之外,还会引起轴向振动和绕 y 轴的扭摆振动,从而形成了斜齿轮系统的弯-扭-轴-摆耦合振动,在这种情况下,一对斜齿轮副的典型的动力学模型如图 8。
这时,系统为一空间三维振动模型。
图8如图8 所示,设主动齿轮的螺旋角为右旋,其大小为β,则啮合点的横向振动x 向和y 向,及横向振动y 向和轴向振动z 向的关系可表示为:tan tan cos tan n t y x y z y ααββ===主动轮1中心点O 1在啮合点上振动位移与主动轮广义位移之间的关系为:()()111111111111111111tan tan tan tan t z t z z x x y x y R y y R z z y z y R αθαθβθβ=-=-+=+=-=-+被动轮2中心点O 2在啮合点上振动位移与被动轮广义位移之间的关系为:()()222222222222222222tan tan tan tan t z t z z x x y x y R y y R z z y z y R αθαθβθβ=+=+-=-=-=--若已知齿轮啮合的端面刚度k t 、端面阻尼c t ,则相应的有:tan tan tan tan mx t t my t mz t mx t tmy tmz t k k k k k k c c c c c c αβαβ======因此,相应的各向动态啮合力为:()()()()()()()()()()()121211112222111122221212112212121122tan tan tan tan tan tan tan tan x mx mx mx z t z t mx z t z t t t z z t t t z z tF k x x c x x k x y R x y R c x y R x y R k x x y y R R c x x y y R R θαθαθαθααθθααθθα⋅⋅⎛⎫=-+- ⎪⎝⎭=-+---+-+---=--++-+--++-()()()()()1212111222111222111222111222y mymy my z z my z z t z z t z z F k y y c y y k y R y R c y R y R k y R y R c y R y R θθθθθθθθ⋅⋅⎛⎫=-+- ⎪⎝⎭=+-+++-+=+-+++-+ ()()()()()()()()()()()121211112222111122221212112212121122tan tan tan tan tan tan tan tan z mz ma mz z z mz z z t z z t z z F k z z c z z k z y R z y R c z y R z y R k z z y y R R c z z y y R R θβθβθβθββθθββθθβ⋅⋅⎛⎫=-+- ⎪⎝⎭=-+-+-+-+-+-=---+++---++ 因此,系统的分析模型为:1111111111111111111111111111122222221222222222222x x x x y y y y z z z z z z y y y y y y y z x x x x y y y y z z z z z z m x c x k x F m y c y k y F m z c z k z F I F R T J c k F R m x c x k x F m y c y k y F m z c z k z F I θθθθθθθ++=-++=-++==--++=-++=-++=-++==-222222222y y y y y y y z F R T J c k F R θθθθθ-++=-(七) 具有质量偏心的齿轮副分析模型设某一级齿轮传动系统可简化为图9所示的力学模型,不考虑齿面摩擦,该系统是一个4自由度的弯扭耦合振动系统。