GPS整周模糊度的求解方法解析
实时GPS姿态测量中整周模糊度的快速解算方法

实时GPS姿态测量中整周模糊度的快速解算方法彭晓刚;吕志平;王新山【期刊名称】《海洋测绘》【年(卷),期】2011(31)2【摘要】姿态测量核心问题是整周模糊度解算.提出了一种适合实时姿态测量的模糊度解算方法,利用单差平滑伪距进行解算,与传统的模糊度解算方法相比具有许多优点.通过仿真实验验证了该方法的有效性和实用性.%The most important problem of the GPS real-time attitude determination is integer ambiguity resolution. This article discusses a new algorithm for integer ambiguity resolution which can be used in real-time attitude determination that uses single-difference smoothed pseudo range measurements. Over the conventional algorithms, it has several advantages. And we investigate the validity and the performance of the new algorithm through simulations.【总页数】4页(P34-37)【作者】彭晓刚;吕志平;王新山【作者单位】解放军信息工程大学测绘学院,河南郑州450052;91404部队,河北秦皇岛066000;解放军信息工程大学测绘学院,河南郑州450052;91404部队,河北秦皇岛066000【正文语种】中文【中图分类】P228.43【相关文献】1.GPS姿态测量的载波相位整周模糊度快速解算 [J], 郑庆晖;张育林2.GPS载体姿态测量中的整周模糊度的快速求解 [J], 肖迪;王美玲3.单频GPS动态定位中整周模糊度的一种快速解算方法 [J], 刘宁;熊永良;冯威;徐韶光4.GPS姿态测量中的整周模糊度的实时解算方法 [J], 彭晓刚;杨靖宝;吝宁5.GPS接收机RTK定位中整周模糊度的快速解算方法 [J], 冯仲科;韩熙春因版权原因,仅展示原文概要,查看原文内容请购买。
GPS整周模糊度
GPS整周模糊度GPS整周模糊度的计算与确定引⾔精密型GPS信号接收机⼀般都具有伪距和载波相位两种基本观测量。
相对于伪噪声码观测量⽽⾔,GPS载波相位观测量能提供⾮常精确的相对定位。
但由于GPS载波相位测量存在整周模糊数较难解算的问题,致使它在快速定位及导航中的应⽤受到了限制。
因此,快速⽽准确地求解GPS载波相位测量的整周模糊度就成了它在快速定位及导航中应⽤的关键问题。
整周模糊度求解的理论及其实⽤研究是近⼀、⼆⼗年的研究热点和难点。
许多学者提出了⼀些解算⽅法,其中双频P码伪距法、整周模糊度函数法、最⼩⼆乘搜索法和整周模糊度协⽅差法应⽤较⼴泛。
整周模糊度的确定是GPS载波相位测量中的关键问题,其原因如下:精确地、不⾜⼀周的相位与修复周跳后的正确整周记数只有在与正确的整周模糊度配合使⽤才有意义。
整周模糊度参数⼀旦出现问题,就将导致⼤量的卫地距出现系统性的粗差,从⽽严重影响定位的精度和可靠性,正确确定整周模糊度N是获得⾼精度定位结果的必要条件。
在⼤量对精确确定整周模糊度的计算研究中不断推出了新的计算算法。
⼏种整周模糊度的确定⽅法:(⼀)快速求解整周模糊度伪距双差⽅程经过线性化之后如下[2],(1)其中,ρ表⽰实际观测值与计算值之差,A表⽰系数阵,δx表⽰坐标增量,v表⽰模型误差和测量噪声,N(·)表⽰正态分布,QDΨ表⽰伪距测量的协⽅差阵。
由式(1),根据最⼩⼆乘原理可得(2)对于载波相位,其双差模型线性化之后可得[3](3)其中,l表⽰实际观测值与计算值之差,λ表⽰L1载波波长,N表⽰载波相位双差模糊度,w 表⽰模型误差和测量噪声,QDφ表⽰载波相位测量的协⽅差阵。
由式(2)、(3),可得整周模糊度的浮点解N^。
(4)由式(4)根据协因数传播定律,此时整周模糊度N^的协⽅差阵QN^为(5)其中表⽰坐标增量的协⽅差阵;表⽰后验⽅差系数;表⽰残差;n表⽰卫星数;u= rank(A)表⽰系数阵A的秩。
短基线GPS控制网双差整周模糊度的直接解算方法
Drc C l l i i t a ua o e c t n方 法 ) 想 进 行 了推 广应 用 , ¨思 丰 富 了静 态 G S测量 中整 周模糊 度 的解算方 法 。 P
实际上 , 在基 线 解算 时 是 以基线 其 中一 个 端点 的坐标 固 定 , 基 线 另一 个 端 点 坐 标 作 为 未 知 参 将 数 。以 1号端点 为 固定 点 , 以得 到 : 可
=
一
度 之 间相 关 性 的 最 小 二 乘 非 相 关 平 差 法 ( A — L MB D [ 等 。这 些方 法 所需 时问 相 对较 短 , 一 般 都 A)8 3 但
需 要 先对观 测数据 进 行 周跳 的探 测 与修 复 , 后 利 然 用多个 历元 的观测 数 据 , 整周 模 糊 度作 为 未 知参 将 数与测 站点 的位置 坐 标 等参 数 一 起解 算 , 出整 周 求 模糊 度 的实 数解 , 通过 各 种方 法将 整 周模 糊 度 固 再 定 为整数 , 最后将 固 定 的整 周模 糊 度 作 为 已知 值 代
的基础上 , 针对 短 基线 G S控 制 网 , 出 G S控 制 P 提 P
的 △ 肿一 应该是整数, 但是由 于 △ 不准确导 p一 : 致 解算的 △肿一 不是整数而是浮点数, 即可以认为 △ 中 ^一的浮点解与整数解之间的偏差来源于 △ } p一
GPS整周模糊度解算的LAMBDA法及程序实现

第3卷第3期2006年6月CHIN ESE J OU RNAL OF EN GIN EERIN G GEOP H YSICSVol 13,No 13J un 1,2006文章编号:1672—7940(2006)03—0225—05GPS 整周模糊度解算的L AMBDA 法及程序实现林 丹,郭 敏,江 华,蒋旭惠(中国地质大学工程学院,武汉 430074)作者简介:林丹(1982—),男,湖北武汉人,中国地质大学(武汉)在读研究生,主要研究方向:GPS ,GIS 技术的工程应用。
E 2mail :lind56001@摘 要:对目前GPS 模糊度解算方法中搜索效率和成功率较好的L AMBDA 的理论进行深入探讨的同时,结合实例对L AMBDA 的解算流程进行了研究。
利用C #编程语言实现了卫星位置、导航位置、基线向量的浮点解和固定解,以及整周模糊度等未知量的可视化输出,为GPS 其它研究工作提供了研究基础。
关键词:GPS ;整周模糊度解算;L AMBDA ;整数最小二乘中图分类号:P228文献标识码:A收稿日期:2006—03—23GPS LAMB DA METH OD AN D ITS PR OGRAM REALIZATIONL IN Dan ,GUO Min ,J IAN G Hua ,J IAN G Xu 2hui(Facult y of Engineering ,China Universit y of Geosciences ,W uhan 430074,China )Abstract :In view of t he shortage of detailed programmed realization of met hods of GPS ambi 2guity resolution ,t his paper talks about L AMBDA met hod for it s high efficiency and success ,and st udies t he resolution p rogram of LAMBDA met hod wit h an example.Then C #p ro 2gram language is used to realize t he floating point resolution and t he fixed resolution of t he following factors such as t he satellite position ,navigation position and t he baseline vector.In addition ,t he outp ut visualization of t he integer ambiguity resolution is achieved.K ey w ords :GPS ;integer ambiguity resolution ;LAMBDA ;integer least square1 引 言过去的二十多年中,国内外许多学者对整周模糊度解算的理论进行了研究,提出了许多解算整周模糊度的方法,如模糊度函数法、最小二乘法和最小二乘模糊度去相关法。
整周模糊度的确定

整周模糊度的确定确定整周未知数,是基于载波相位测量进行相对定位,必需解决的另一个关键问题。
精确和快速地求解整周未知数,对于确保相对定位的高精度,提高作业效率,开拓高精度动态定位新方法,都是极其重要的。
确定整周未知数的方法许多,若按解算所需时间的长短区分,可分为经典静态相对定位法和快速解算模糊度(整周未知数)法,而快速解算模糊度法又包括交换天线法,P码双频法、滤波法,搜寻法和模糊函数法等等;若按确定整周未知数时gps接收机的运动状态区分,又可分为静态法和动态法。
上述各种快速解算法皆属于静态法的范畴。
所谓动态法,就是GPS接收机在运动状态中完成求解整周未知数,它是实施高精度实时动态定位的基础。
一、经典静态相对定位法确定整周未知数这种方法是将作为待定的未知参数,在基线平差中与其它未知参数(如δXi、δYi、δZi等)一并求解的方法。
一般是由载波相位观测值组成双差分观测方程式,并进行方程式线性化,得到双差分误差方程式,则该方程式中包含有待定测站三个坐标改正数δXi、δYi、δZi和整周未知数的线性组合这四个未知数[此处]。
只要在已知测站和待定测站上同步观测不少于4颗卫星,则可平差解出整周未知数。
用这种方法一般需观测较长时间(几非常钟至几小时),但解算的精度最高,常用于静态相对定位中,尤其是用于长距离相对定位中。
在平差计算中,依据对的取值方式不同,可分为“整数解”(固定解)和“实数解”(浮动解)两种。
整数解是利用应当是整数的特性[也应为整数],将解得的▽▽N(t0)值进行凑整(凑成最接近的整数),然后将凑整后的作为已知量再代入双差分误差方程,重新平差,解算待定测站坐标改正数。
这种方法,只有当观测误差和外界误差对观测值影响较小,解得的比较接近整数的状况下才有效,此时,它可以提高解算结果的精度。
整数解常用于四、五十公里以下的基线的相对定位。
实数解当联测基线较长时,某些外界误差(如大气折射误差、卫星星历误差等)对基线两端点观测值的影响差别较大(即相关性不强),这时,在两测站间求差分时,就不能较好地消退或减弱其影响,它们在基线平差解算中将被汲取进待定测站坐标改正数和整周未知数中,这样解算出来的整周未知数一般偏离整数值较远,且其精度较低,误差可能大于半周,这时,我们不再考虑的整数特性,而取其实际解算值―实数解。
GPS(8):模糊度分解与计算
)
如果区间中只有一个整数,该整数即为所 求的模糊度。固定求出的模糊度重复计算,直 至解出所有的模糊度。
1.3、方差比检验法 、
设有r个双差模糊度参数,每个模糊度参数 可能取的整数有ni个,则置信区间中所有整数的 r 全组合为: N = ∏nj
j =1
将所有的整数解代入法方程,求出相应的单 位权方差。若次小与最小单位权方差在统计意义 上有显著差异,即: 2 2 σ sec σ min ≥ ξ F ( f , f ,1α ) 则最小单位权方差所对应的就是需要的整 数解向量。
ii x N ik
mx N = σ 0 q x N ik ik
x N kk
2.1、备选整数模糊度向量(续1) 、备选整数模糊度向量( )
如果是双频观测值,其线性组合: λ2 xLik = x N i x N k λ1 的误差很小,其置信区间为:
Pi xLik ξ t ( f ,1α 2 )mxL ≤ xLik ≤ xLik + ξ t ( f ,1α 2 )mxL = 1 α
2.2、备选整数解检验 、
通过上述检验,剔除大量的模糊度备选向 量。将通过检验的模糊度备选向量逐个代入法 方程进行解算,其中具有最小方差的解作为最 终的整数解向量,除非: 1、最小方差解得的坐标或基线向量与初始实数 解不相容; 2、最小方差解的单位权方差与初始解的单位权 方差不相容; 3、最小方差解的单位权方差与次最小方差解的 单位权方差的差异不显著。
二、模糊度的快速分解法
由Frei等人提出。采用快速分解法双频接收机 只需要5min左右的观测数据,单频接收机小于 30min的观测数据。 2.1、备选整数模糊度向量 、 未知参数向量为:
T xT = xC , xT N
GPS整周模糊度解算方法

GPS 整周模糊度解算方法探讨一、为什么要解算GPS 整周模糊度?整周模糊度的确定是载波相位测量中的关键问题,这是因为:(1)精确的、不足1周的相位观测值()φr F 和修复周跳后的正确的整周计数()φInt 只有与正确的整周模糊度配合使用才有意义。
模糊度参数一旦出错,就将导致大量的卫地距出现系统性的粗差,从而严重损害定位的精度和可靠性。
正确确定整周模糊度N 是获得高精度定位结果的必要条件。
(2)在一般精度的GPS 定位中,定位所需的时间实际上就是正确确定整周模糊度所需要的时间。
快速确定整周模糊度对提高GPS 定位的作业效率具有极其重要的作用;对开拓GPS 定位技术的应用领域,将其推广应用到低等级控制测量和一般的工程测量等领域也具有极其重要的作用。
二、GPS 整周模糊度解算方法1、LAMBDA 法1993年荷兰Delft 大学的Teunissen 教授提出了最小二乘模糊度降相关平差法,简称LAMBDA 法。
该方法可缩小搜索范围,加快搜索过程,是目前快速静态定位中最成功的一种模糊度搜索方法。
LAMBDA 法的基本原理: (1)整数变换在LAMBDA 法中,并不直接对整数模糊度参数N 进行搜索,而是先对初始解中的实数模糊度参数⎪⎭⎫⎝⎛=∧∧∧∧n N N N N ,......,,21及其协因数阵∧N Q 进行整数变换:∧∧⋅=N Z z TZ Q Z Q NT z⋅⋅=∧∧式中Z 为整数变换矩阵。
整数变换具有以下特点:当N 为整数时,变换后的参数z 也为整数;反之,当z 为整数时,经逆变换后所得的()z Z N T⋅=-1也为整数。
整数变换并不是唯一的。
我们希望整数变换后所得到的新参数⎪⎭⎫⎝⎛=∧∧∧∧n z z z z ,......,,21之间的相关性能显著减小,其协因数阵∧z Q 中的非对角线元素5.0≤,模糊度参数的方差也能大幅度减小。
注意,整数变换指的是具有上述特性的一种数学变换方法,但并非只能对整数进行变换。
整周模糊度的解算
GPS精密定位周跳检测与修复(Cycle slip detection and repair)完整的载波相位是由初始整周模糊度N、计数器记录的整周数INT和接收机基频信号与收到到卫星信号的小于一周部分相位差Δφ。
Δφ能以极高的精度测定,但这只有在N和INT都正确无误地确定情况下才有意义。
卫星在观测中失锁后,造成接收机载波整周计数INT误差,这种现象称为周跳。
当重新捕获卫星后,周跳给计数器造成的偏差即为中断期间丢失的整周数,小周跳可以通过检测方法发现后并加以修复,大的周跳或较长时间的失锁,周跳不易修复,需要重新固定整周模糊度。
周跳的探测及修复对于用载波相位精密定位至关重要,成功的修复才能获得高精度的结果。
周跳产生的原因:1.卫星信号暂时阻断;2.仪器线路暂时故障;3.外界环境的突变干扰,如电离层、动态变化。
检测周跳的主要方法:1.屏幕扫描法观测值中出现周跳后。
相位观测值的变化率就不再连续。
凡曲线出现不规则的突然变化时,就意味着在相应的相位观测值中出现了整周跳变。
早期进行GPS相位测量的数据处理时,就是靠作业人员坐在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值的变化率的图像进行逐段检查来探测周跳,然后再加以修复。
这种方法比较直观,在早期曾广泛使用。
但由于工作繁琐枯燥乏味,而且需反复进行,所以这种手工编辑方法目前正逐步被淘汰,而很少使用了。
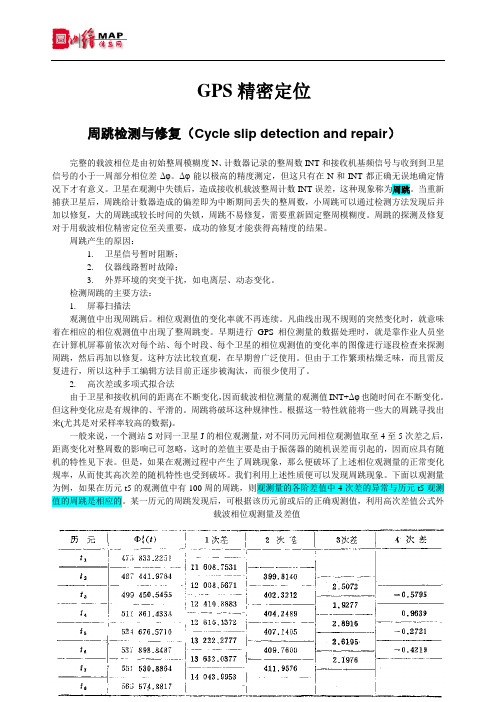
2.高次差或多项式拟合法由于卫星和接收机间的距离在不断变化,因而载波相位测量的观测值INT+Δφ也随时间在不断变化。
但这种变化应是有规律的、平滑的。
周跳将破坏这种规律性。
根据这一特性就能将一些大的周跳寻找出来(尤其是对采样率较高的数据)。
一般来说,一个测站S对同一卫星J的相位观测量,对不同历元间相位观测值取至4至5次差之后,距离变化对整周数的影响已可忽略,这时的差值主要是由于振荡器的随机误差而引起的,因而应具有随机的特性见下表。
但是,如果在观测过程中产生了周跳现象,那么便破坏了上述相位观测量的正常变化规率,从而使其高次差的随机特性也受到破坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
法,整周模糊度函数法,多历元,最小二乘
引言:关于整周模糊度的重要性及意义
高精度GPS定位,必须采用相位观测量。接收机纪录的只是相位差的小数部分,而初始的整周部分N是初始观测历元卫星和观测站间距离相对于载波波长的整数,称为整周模糊度,是未知的。由载波相位测量定位原理可知,以载波观测量为根据的精密测量中,初始整周模糊度的确定是定位的一个关键问题。准确与快速地解算整周模糊度对保障定位精度、缩短定位时间、提高GPS定位效率都具有极其重要的意义。因此,要将观测值转换为站星间距离,已取得高精
当基线较长时,误差的相关性将降低,许多误差消除的不够完善。所以无论是基线向量还是整周未知数,均无法估计的很准确。在这种情况下再将整周未知数固定为某一整数往往无实际意义,所以通常将实数解作为最后解。
采用经典方法解算整周未知数时,为了能正确求得这些参数,往往需要一个小时甚至更长的观测时间,从而影响了作业效率,所以只有在高精度定位领域中才应用。4.多普勒法(三差法)
该方法的缺点是:搜索空间极大,计算量非常庞大,计算时间较长;难以满足动态实时的要求。
3.经典待定系数法
把整周未知数当做平差计算中的来加以估计和确定有两种方法。(1)整数解
整周未知数从理论上讲应该是一个整数,利用这一特性能提高解的精度。短基线定位时一般采用这种方法。具体步骤如下:
首先根据卫星位置和修复了周跳后的相位观测值进行平差计算,求得基线向量和整周未知数。由于各种误差的影响,解得的整周未知数往往不是一个整数,称为实数解。然后将其固定为整数(通常采用四舍五入法),并重新进行平差计算。在计算中整周未知数采用整周值并视为已知数,以求得基线向量的最后值。(2)实数解
GPS整周模糊度的求解方法
摘要:高精度GPS定位,必须采用相位观测量。接收机纪录的只是相位差的小数部
分,而初始的整周部分N是初始观测历元卫星和观测站间距离相对于载波波长的整数,称为整周模糊度,是未知的。在GPS定位中,得到模糊度初值后,如何选择合适的搜索准则和解算方法将直接影响定位的效率。本文分析了几种常用的整周模糊度势的新方法。
度的定位结果,必须预先解得模糊度的大小。很明显,当以载波相位观测量为依据,进行精密相对定位时,整周未知数的确定,是一个关键问题。
目前确定解算模糊度的方法有很多种,如经典待定系数法、快速模糊度分解法(FARA)、最小二乘搜索法、LAMBDA方法等,下面就几种模糊度解算方法进行阐述。
确定整周模糊度的传统方法:
模糊度函数法AFM是利用模糊度的整数特性来确定模糊度的一种方法。他将载波相位残差转化为复平面上的一个函数,然后利用余弦函数对2郑州倍数的不敏感性,则对应函数值最大的搜索网络点为要求之解。找到该解后,即可由观测值确定整周模糊度。
模糊度函数法确定整周模糊度的方法按以下3歩进行:确定未知点的初始化坐标,简历搜索空间;逐点搜索;固定模糊度。
(1)
式中,L为双差码伪距和载波相位观测矢量;B为差分GPS定位系数矩阵;dx为坐标未知数改正数向量;N为载波相位双差模糊度,具有整数特性;A为模糊度系数矩阵;D为观测矢量方差阵。引入迭代最小二乘方法,可得到不含坐标未知数改正数向量dx的定位方程:
由于连续跟踪的所有载波相位观测值中均含有相同的整周未知数N0,所以将相邻的两个观测历元的载波相位相减,就将该未知参数消去,从而直接接触坐标参数。这就是多普勒法。但是两个历元之间的载波相位观测值之差受到此期间接收机钟及卫星钟的随机误差的影响,所以精度不太好,往往用来解算未知参数的初始值。三差法可以消除掉许多误差,所以应用比较广泛。5.伪距法
整周模糊度求解的理论及其实用研究是近一、二十年的研究热点和难点。许多学者提出了一些解算方法,其中快速模糊度解算法、整周模糊度函数法、经典待定系数法、多普勒法(三差法)、伪距法为常用的方法。1.快速模糊度解算法(FARA)
快速模糊度解算法FARA是一种基于统计检验的算法.首先用一组相位观测数据进行双差解,求解出实数的双差相位模糊度和位置参数.然后,根据解的统计信息,建立置信区间,对每一组落在该置信区间的模糊度组合进行检验,找出一组既能满足统计检验,又具有最小方差的模糊度组合作为正确的模糊度解'".
FARA的采样时间很短,利用少量观测量进行初次平差计算所求得的基线和模糊度参数的精度并不高,与它们最接近的整数不一定就是正确的整周模糊度.但是大约有99%的可能性,正确的整数是落在置信区间内的.因此,将全部模糊度参数的候选值排列组合起来.正确的一组整数组合必然在其中,接着通过各种检验,将不正确的整数组合先行剔除,将可能正确的少数组合保留下来,将保留下来的整数组合作为已知值代人重新进行平差计算,计算的一组整数组合所产生的单位权方差应为最小,根据这一原理将正确的一组整周模糊度挑选出来. 2.整周模糊度函数法
伪距法是在进行载波相位测量的同时又进行了伪距测量,将伪距观测值减去载波相位测量的实际观测值(化为以距离为单位)后即可得到λ*N0.但由于伪距测量的精度比较低,所以要有较多的λ*N0取平均值后才能获得正确的整波段数。
确定整周模糊度的新方法:
1基于多历元递推最小二乘卡尔曼滤波方法的模糊度解算
在GPS动态定位中,载波相位模糊度的解算多采用伪距信息和载波相位信息统一解算,其中伪距可以是一个历元的伪距观测信息,也可以是多个历元的伪距平滑信息,但是由于动态定位中目标点空间坐标在变化之中,载波相位信息目前常采用单个历元观测量,而放弃前续历元的载波相位观测信息。如能有效地利用此多个历元的载波相位信息,将有助于模糊度的解算。针对这个问题提出了同时使用多个历元的伪距信息和载波相位信息来解算载波相位模糊度。与此同时,卡尔曼滤波技术在GPS导航定位中有着广泛应用,但是由于受到系统状态方程模型精度的限制,在cm级的差分GPS定位中,卡尔曼滤波使用的并不多。但如果系统状态方程的模型精度很高,即仅对模糊度参数建模,滤波效果则大为改善。GPS动态差分定位中的迭代最小二乘方法:由GPS双差线性观测方程: