基于SolidWorks的机构运动仿真研究
实验指导书实验六SolidWorks运动仿真

实验一 SolidWorks运动仿真一、实验目的1.掌握SolidWorks图形装配方法2.掌握SolidWorks装配图的motion分析操作方法二、实验内容完成下列3个模型的装配及运动仿真图1压榨机机构图2凸轮机构图3夹紧机构三、实验步骤压榨机机构的装配与仿真3.1 压榨机机构的装配3.1.1 选择【文件】/【新建】/【装配体】命令,建立一个新装配体文件。
依次将机架和压榨杆添加进来,添加机架与压榨杆的同轴心配合。
如图4。
再将滑块添加进来,添加滑块与压榨杆的重合配合,如图5。
图4机架与压榨杆的同轴心配合图5滑块与压榨杆的重合配合3.1.2 添加滑块端面与机架端面的重合配合,以及滑块前视基准面与机架前视基准面的重合配合(点击图形区域左边的装配体下的机架前的“+”号即可找到前视基准面)最后将滑块拖动到中间位置。
图6机架与滑块的重合配合图7机架与滑块前视基准面的重合配合3.2 压榨机机构的运动仿真3.2.1 仿真前先将“solidworks motion ”插件载入,单击工具栏中按钮“”的下三角形,选择其中的“插件”,在弹出的“插件”设置框中,选中“solidworks motion”的前后框,如下图8所示。
在装配体界面,单击左下角的【运动算例】,再在【算例类型】下拉列表中选择【motion 分析】如下图9所示。
图8载入插件图9 motin 分析3.2.2 添加实体接触:单击工具栏上的“接触按钮”,在弹出的属性管理器中【接触类型】栏内选择“实体接触”,在【选择】栏内,点击视图区中压榨杆和滑块,“材料”栏内都选择“steel (dry)”, 单击“确定”按钮“”,如下图10所示。
同理再为滑块与机架添加实体接触,参数设置与压榨杆与滑块之间的一样。
图10添加实体接触3.2.3 添加驱动力:物体对压榨杆的反作用力即为驱动力,故在压榨杆上添加一恒力即可。
单击工具栏中的“力”按钮“”,在弹出的【力/扭矩】属性管理器中,【类型】选择“力”,【方向】选择“只有作用力”,“作用零件和作用应用点”,选择压榨杆上表面,单击改变力的方向向下,【力函数】选择“常量”,大小输入50牛顿,单击确定按钮。
基于SolidWorks的机构运动仿真研究

Based on the request mechanism kinematics innovation design, this thesis studies the method of movement simulation on the platform of SolidWorks. Discusses key techniques on how to realize the movement simulation system with Visual C++. These techniques include solid mass modeling, database, data processing, chart output and movement simulation on screen. The movement simulation of solid mechanism is realized. Firstly,The method of parameterized solid modeling on the SolidWorks platform is studied. Two difference methods of parameterized solid modeling are compared; one of the methods is strict introduced. The three-dimensional parameterized design of simple part is realized. It simplifies the modeling process and raises the modeling efficiency. Secondly,Three algorithms is presented to deal with different mechanism, based on it, a method of using the C++ Math Library of MATLAB is presented to simplify the solving process in the data processing. The parameters of position, velocity and acceleration are calculated by using the method. An Access database is build to manage the date, and all of the parameters are saved in database. Thirdly,Integrated kinematics analysis with SolidWorks software. Perform the second development on SolidWorks 2001+ by VC++6.0 and API interface. The three-dimensional solid kinematics simulation of simple mechanism and multi-mechanism is achieved.
SolidWorks课件教案第13章 运动仿真

(3)在“弹簧”属性管理器中设置其他参数,单击“确定”,完成 弹簧的创建。 (4)单击MotionManager工具栏中的“计算”按钮,计算模拟。 MotionManager界面如图所示。
13.1.4 接触
接触仅限基本运动和运动分析,如果零部件碰撞、滚动或滑动,可以在 运动算例中建模零部件接触。还可以使用接触来约束零件在整个运动分析过 程中保持接触。默认情况下零部件之间的接触将被忽略,除非在运动算例中 配置了“接触”。如果不使用“接触”指定接触,零部件将彼此穿越。
(1)单击MotionManager工具栏中的“接触 “按钮,弹出如图所示的“接触”属性管理器。 (2)在“接触”属性管理器中选择“实体”,然 后在绘图区域选择两个相互接触的零件,添加它 们的配合关系。 (3)在“材料”栏中更改两个材料类型分别为 “Steel(Dry)”与“Aluminum(Dry)”属性 管理器中设置其他参数,单击“确定”,完成接 触的创建。
13.1.3 阻尼
如果对动态系统应用了初始条件,系统会以不断减小的振幅振动,直到最终停 止。这种现象称为阻尼效应。阻尼效应是一种复杂的现象,它以多种机制(例 如内摩擦和外摩擦、轮转的弹性应变材料的微观热效应、以及空气阻力)消耗 能量。
(1)单击MotionManager工具栏中的“阻尼“按钮,弹出 “阻尼”属性管理器。 (2)在“阻尼”属性管理器中选择“线性阻尼”,然后在 绘图区域选取零件上弹簧或阻尼一端所附加到的面或边线。 此时在绘图区域中被选中的特征将高亮显示。 (3)在“阻尼力表达式指数”和“阻尼常数”中可以选择 和输入基于阻尼的函数表达式,单击“确定”,完成接触 的创建。
基于SolidWorks的连杆机构的运动分析与仿真
第1期(总第146期)2008年2月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATION No 11Feb 1文章编号:167226413(2008)0120077202基于SolidWorks 的连杆机构的运动分析与仿真卫江红(德州学院机电工程系,山东 德州 253015)摘要:研究了在SolidWorks 平台上进行连杆机构运动分析与仿真的方法。
以型转化及广义型转化理论为运动分析的理论基础,采用VC ++610编程语言,利用SolidWorks 提供的API 接口,实现了三维实体构件的建模、机构的分解和分析仿真的自动化。
关键词:运动分析;仿真;SolidWorks ;连杆机构中图分类号:TH 13315∶TP 39119 文献标识码:A收稿日期:2007205209;修回日期:2007209217作者简介:卫江红(19802),女,山西运城人,助教,硕士。
0 引言目前,国外机构运动分析方面的软件在人机交互、图形图像处理和可视化方面做的比较好,但在运动分析时一般采用非线性方程组迭代求解,速度慢,特别是对于比较复杂的机构就更慢,有时甚至不能收敛;国内这方面的软件在运动分析及受力分析方法方面已达到世界先进水平,但大多是用二维符号表示传动类型和机构结构类型[1],一般也仅着眼于数值计算,缺乏与三维CAD 技术的紧密结合,不适合一般工程技术人员使用。
因此,以强大的三维实体造型软件为支撑软件,结合国内先进的分析方法,开发连杆机构参数化实体运动分析和仿真系统是十分有意义的。
1 连杆机构运动分析与仿真系统的实现图1为连杆机构运动分析和仿真系统功能模型。
系统具备对由转动副、移动副等连接而成的连杆机构进行三维参数化实体建模、运动学分析以及动态仿真的功能。
111 参数化构件库的建立及实体装配为了实现构件的快速建模和避免重复性工作,建立一些常用构件的三维参数化模板库,用户可以在特征模板中查询和调用各种构件模型,见图2。
基于SolidWorks的机构运动仿真研究

基于SolidWorks的机构运动仿真研究基于SolidWorks的机构运动仿真研究摘要:本文以SolidWorks为工具,通过对机构运动仿真的研究,深入探讨了机构运动学的基本理论和仿真方法。
首先介绍了SolidWorks的基本功能和使用方法,然后结合实际案例,详细分析了机构运动仿真的关键问题和解决方法。
最后,通过运动仿真实验,验证了所提出的方法的可行性和准确性。
1. 引言机构运动学是机械设计领域的重要基础理论,通过对机构的运动学性能进行分析和优化,可以提高机器人和机械装置的运动精度和效率。
而SolidWorks作为一种广泛应用的CAD软件,具有强大的建模和仿真功能,对机构运动建模和仿真提供了有效的工具和方法。
2. SolidWorks的基本功能和使用方法SolidWorks是一种基于约束关系进行设计和建模的三维CAD软件,具有强大的建模、装配和仿真功能。
在SolidWorks中,用户可以通过绘图、装配、运动和分析等功能,对机构进行全面的建模和仿真。
同时,SolidWorks还可以对机构进行各种参数化设计和优化,提高设计的灵活性和效率。
3. 机构运动仿真的关键问题和解决方法机构运动仿真是机构运动学研究的重要内容,主要包括机构的运动规律、速度、加速度和位置分析等。
在SolidWorks中,可以通过约束关系、关键点和运动学驱动等功能来模拟机构的运动行为。
同时,还可以通过添加传感器和测量工具等功能,对机构的运动参数进行实时监测和分析,从而得到准确的运动学性能指标。
4. 案例分析通过一个简单的四杆机构来说明在SolidWorks中实现机构运动仿真的过程。
首先,利用绘图功能绘制四杆机构的草图,并添加约束关系使其正确组装。
然后,通过运动功能设置机构的运动规律和速度,同时观察机构的关键点和路线等参数。
最后,对机构的运动进行分析和优化,通过添加驱动装置和调整驱动参数,使机构的运动更加平稳和高效。
5. 实验验证通过将仿真模型导出到SolidWorks Motion中,可以进行机构运动的实时仿真和性能分析。
基于SolidWorks的行星齿轮机构运动仿真模型
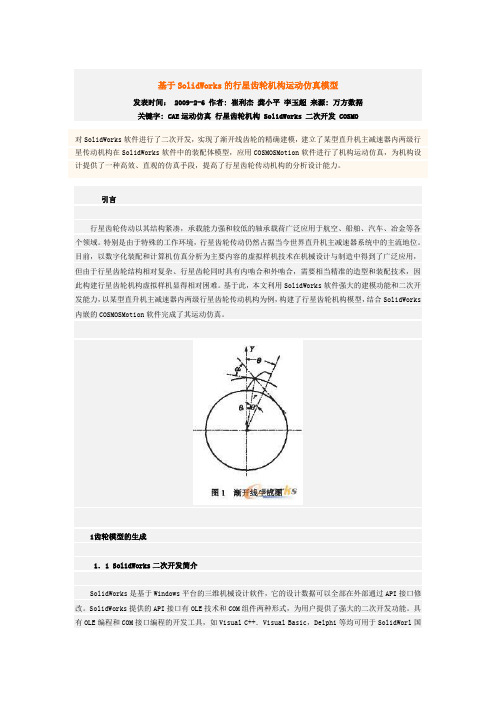
基于SolidWorks的行星齿轮机构运动仿真模型发表时间: 2009-2-6 作者: 崔利杰龚小平李玉超来源: 万方数据关键字: CAE运动仿真行星齿轮机构 SolidWorks 二次开发 COSMO对SolidWorks软件进行了二次开发,实现了渐开线齿轮的精确建模,建立了某型直升机主减速器内两级行星传动机构在SolidWorks软件中的装配体模型,应用COSMOSMotion软件进行了机构运动仿真,为机构设计提供了一种高效、直观的仿真手段,提高了行星齿轮传动机构的分析设计能力。
引言行星齿轮传动以其结构紧凑,承载能力强和较低的轴承载荷广泛应用于航空、船舶、汽车、冶金等各个领域。
特别是由于特殊的工作环境,行星齿轮传动仍然占据当今世界直升机主减速器系统中的主流地位。
目前,以数字化装配和计算机仿真分析为主要内容的虚拟样机技术在机械设计与制造中得到了广泛应用,但由于行星齿轮结构相对复杂、行星齿轮同时具有内啮合和外啮合,需要相当精准的造型和装配技术,因此构建行星齿轮机构虚拟样机显得相对困难。
基于此,本文利用SolidWorks软件强大的建模功能和二次开发能力,以某型直升机主减速器内两级行星齿轮传动机构为例,构建了行星齿轮机构模型,结合SolidWorks 内嵌的COSMOSMotion软件完成了其运动仿真。
1齿轮模型的生成1.1 SolidWorks二次开发简介SolidWorks是基于Windows平台的三维机械设计软件,它的设计数据可以全部在外部通过API接口修改。
SolidWorks提供的API接口有OLE技术和COM组件两种形式,为用户提供了强大的二次开发功能。
具有OLE编程和COM接口编程的开发工具,如Visual C++.Visual Basic,Delphi等均可用于SolidWorl国的二次开发,创建出用户定制的、专用的SolidWorks功能模块。
除此之外,SolidWorks还提供了内置的宏命令编程,使得SolidWorks的定制更加容易。
SolidWorks运动仿真完全教程
15
运动副基础知识(6)
In Line点在直线上
In Plane点在面内
方向
指定 的面
连接点
连接点
X参考轴
约束2个移动自由度
约束构件1的连接点,只能沿着构件2连接点 标记的Z轴运动
© 2007 SolidWorks Corp. Confidential.
a Concentric joint.
– 一个正交同轴配合转化为同轴副
One Coincident and One Orthogonal Concentric mates in
SolidWorks becomes a Revolute joint.
– 一个重合和一个正交同轴配合转化为一个转动 副
One Point to Point coincident mate in SolidWorks
Pendulum restrained to pivot about mounting point
5
Constraint Mapping约束映射
▪ Mapping of SolidWorks assembly mates (constraints) to COSMOSMotion joints.
映射SolidWorks装配体配合(约束)为 COSMOSMotion的运动副
运动约束 PointPoint PointPointDist PointLine PointLineDist PointPlaneDist PointPlaneDist PointLineDist PointLine LineLine LineLineDist LineLineAng LineLineAng (0 deg.) LineLineAng (90 deg.)
基于SolidWorks的浮动仿形机构设计与试验

基于SolidWorks的浮动仿形机构设计与试验孟玉刚,张 宁,孙文婷,包德胜,张 丽,李 伟(中国农业机械化科学研究院呼和浩特分院有限公司,呼和浩特 010010)摘 要:针对牧草收获过程中集拢成条时花叶损失多、对土地破坏大的问题,设计研制出一种左右对称布置浮动仿形机构的牧草捡拾集条机。
利用SolidWorks软件建立了浮动仿形机构的三维模型,通过Motion插件对浮动仿形机构进行运动学模拟仿真,以浮动仿形机构上的浮动弹簧为主要研究对象,获取了浮动弹簧作用力、浮动弹簧位移的变化规律。
为考察样机的作业性能指标,对样机进行了田间试验,将样机的相关技术指标进行测定。
运动学模拟仿真与田间试验结果表明:浮动仿形机构满足设计要求,可保证整机具备良好的田间通过性,牧草捡拾集条机相关技术指标达到标准及设计任务书要求,工作性能稳定可靠。
关键词:牧草捡拾集条机;浮动仿形机构;运动仿真;SolidWorks/Motion中图分类号:S225.8 文献标识码:A文章编号:1003-188X(2021)02-0145-050 引言牧草生产是畜牧业发展的基础,畜牧业的发展离不开草业发展,发展集约型畜牧业道路需要牧草种植、收获、运输、加工机械的快速发展[1]。
牧草捡拾集条机是一种新型的牧草收获机械,主要应用于牧草的集拢成条。
牧草捡拾集条机田间作业时与传统的搂草机不同:传统的搂草机总是拖拽牧草使其向预定一侧形成草条,而牧草捡拾集条机将刈割的牧草在割倒的地方直接捡拾输送到机具一侧形成草条,整个过程牧草与土壤没有接触。
因此,集拢成条时不但牧草的花叶损失较小,而且减少对土地的破坏。
捡拾集条机是否具备良好的通过性既影响机器的作业效率,又关系到对土壤的影响。
浮动仿形机构作为牧草捡拾集条机的主要功能部件,核心的功能在于保证牧草捡拾集条机在地表作业时获得较好的地面仿形,以此来确保牧草捡拾集条机作业性能稳定。
因土壤类型、阻力的不同及地形高低起伏的变化,需要在牧草捡拾集条机上设计结构性能合理的仿形机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安理工大学硕士学位论文
械系统的虚拟模型,伴之以三维可视化处理,模拟其在现实环境下系统 的运动和动力特性,并根据仿真的结果来精化和优化系统的设计。计算 机运动仿真技术已经越来越成为人们代替或部分代替样机制作、工艺试 验,以获取所需数据结果并最终完成对产品的性能测试及验证的有力技 术手段【1】 。 虚拟模型技术应当属于计算机辅助工程(CAE)的一个分支,它的核心 部分是多体系统运动学与动力学建模理论及其技术实现。作为应用数学 一个分支的数值算法及时地提供了求解这种问题的有效的快速算法。近 年来的计算机可视化技术以及动画技术的发展为这项技术提供了友好的 用户界面, CAD/FEA 等技术的发展为虚拟模型技术的应用提供了技术环 境。借助于虚拟模型技术,设计过程先从整机开始,按照“由上至下” 的顺序进行,这样可以避免由于系统设计方面的失误而付出的昂贵代价。 目前, 虚拟模型和计算机仿真技术
ABSTRACT
Based on the request mechanism kinematics innovation design, this thesis studies the method of movement simulation on the platform of SolidWorks. Discusses key techniques on how to realize the movement simulation system with Visual C++. These techniques include solid mass modeling, database, data processing, chart output and movement simulation on screen. The movement simulation of solid mechanism is realized. Firstly,The method of parameterized solid modeling on the SolidWorks platform is studied. Two difference methods of parameterized solid modeling are compared; one of the methods is strict introduced. The three-dimensional parameterized design of simple part is realized. It simplifies the modeling process and raises the modeling efficiency. Secondly,Three algorithms is presented to deal with different mechanism, based on it, a method of using the C++ Math Library of MATLAB is presented to simplify the solving process in the data processing. The parameters of position, velocity and acceleration are calculated by using the method. An Access database is build to manage the date, and all of the parameters are saved in database. Thirdly,Integrated kinematics analysis with SolidWorks software. Perform the second development on SolidWorks 2001+ by VC++6.0 and API interface. The three-dimensional solid kinematics simulation of simple mechanism and multi-mechanism is achieved.
【关键词】 : SolidWorks;运动仿真; Visual C++; DLL;二次开发; MATLAB
I
目录
Research of Mechanism Movement Simulation Based on SolidWorks
Speciality:Mechanical Design Candidate: Han Rui Supervisor: Xi Xiangru Argument date:Mar.2004
I
& Theory signature:_______ signature: _______
西安理工大学硕士学位论文 At last,The result of kinematics analysis is processed and visualized by using the display function of Matlab. The results of the application are very favorable.
Key Words: SolidWion; Visual C++; DLL; Secondary
Development; MATLAB
II
第一章 绪论
1 绪论
1.1 引言
近些年来,随着计算机技术的发展,计算机图形处理能力日益增强, 以计算机为主要工具的仿真技术也迅速发展起来,并很快应用于工程领 域。在计算机辅助下进行机械零件的设计、校核,并进行系统运动仿真 已经逐渐成为机械设计的发展方向。 在传统的设计与制造过程中,首先是方案设计及论证,然后进行产 品设计。在设计完成后,为了验证设计,通常要制造样机进行试验,有 时这些试验甚至是破坏性的。当通过试验发现缺陷时,又要回头修改设 计并再用样机验证。只有通过周而复始的设计 --试验 --设计过程,产品 才能达到要求的性能。这一过程是冗长的,尤其对于结构复杂的系统,设 计周期无法缩短,更不用谈对市场的灵活反应了。在大多数情况下,工 程师往往为了保证产品按时投放市场而中断这一过程,使产品在上市时 便有先天不足的毛病。在市场竞争的背景下,基于实际样机上的设计验 证过程严重地制约了产品的质量的提高、成本的降低和对市场的占有。 随着经济贸易的全球化,要想在竞争日趋激烈的市场上取胜,缩短开发 周期,提高产品质量,降低成本以及对市场的灵活反应都已成为竞争者 们所追求的运营方式,谁早推出产品,谁就占有市场。然而,传统的设 计与制造方式却无法满足这些要求。 计算机运动仿真作为计算机仿真技术的一个重要分支,可以归入虚 拟现实技术 VR(Virtual Reality)的范畴,它汇集了计算机图形学、多媒体 技术、实时计算技术、人机接口技术等多项关键技术。作为一门新兴的 高技术,已经成为工程技术领域计算机应用的重要方向。尤其在航天、 国防及其它大规模复杂系统的研制开发过程中,计算机运动仿真已经成 为不可缺少的工具。借助于这项技术,工程师们可以在计算机上建立机
指导教授:郗向儒(副教授) 答辩时间:2004 年 3 月 摘 要
本文针对机构运动创新设计实验的需要, 研究了在 SolidWorks 平台上进行机构运 动仿真与分析的方法。对使用 Visual C++开发运动仿真系统需要解决的实体建模、数 据库操作、数据处理、参数曲线输出、屏幕运动仿真等关键技术进行了研究。开发了 机构运动仿真软件,实现了三维实体机构的运动仿真。 首先,研究了在 SolidWorks 平台上进行参数化实体建模的方法。本文对两种不同 的参数化建模方法进行了比较,选择了其中一种通过修改模型参数实现参数化建模的 方法,实现了简单零件的三维参数化建模,简化了建模过程,提高了建模效率。 其次,针对不同机构的特点,采用了三种不同的算法来处理运动仿真数据,在此 基础上, 提出了在数据处理部分使用 MATLAB C++数学函数库进行求解的方法, 简化 了求解的过程。通过这种方法计算出了各构件的位置、速度和加速度等运动学参数。 建立了 Access 数据库对数据统一进行管理, 并将所有构件的运动学参数保存在数据库 中。 再次, 将运动分析与 SolidWorks 软件相结合, 利用其提供的 API 接口, 在 VC++6.0 开发环境对下对 SolidWorks 进行了二次开发, 实现了简单机构的实体运动仿真和多机 构组合的实体运动仿真。 最后, 利用 MATLAB 软件的图形显示功能, 将运动学分析结果进行了可视化处理, 并以图表的方式显示出来,取得了较好的直观效果。
西安理工大学 硕士学位论文 基于SolidWorks的机构运动仿真研究 姓名:韩锐 申请学位级别:硕士 专业:机械设计及理论 指导教师:郗向儒 20040301
摘
要
基于 SolidWorks 的机构运动仿真研究
学科名称:机械设计及理论 论文作者:韩 锐 签名____________ 签名____________
2
第一章 绪论
究,在克服立体图闪烁的措施和深度感试验方面采用了一些独特的方法。 他们针对室内环境的特点,提出借助图像变换,使立体视觉图像中对应 水平特征呈现形状一致性,以利于实现特征匹配,并获取物体三维结构 的新颖算法。 哈尔滨工业大学机械系在机构的三维运动仿真方面进行了不少研 究,他们使用 OpenGL 开发的机构三维仿真软件成功地模拟出了一些常 用机构的运动状态,并在此基础上加入了一些计算机辅助设计和分析的 功能。该校计算机系成功地摹拟出了人的脸部动作,如表情的合成和唇 动的合成。 浙江大学 CAD&CG 国家重点实验室开发出了一套桌面虚拟建筑环 境实时漫游系统,实现了立体视觉,同时提供的交互工具使系统的真实 感达到了较高的水平。 北京航空航天大学计算机系着重研究了虚拟环境中物体物理特性的 表示和处理,在虚拟现实的视觉接口方面开发出了部分软硬件,提供了 用于飞行员训练的虚拟现实系统。 西安交通大学信息工程研究所对立体显示技术进行了研究,提出了 一种基于 JPEG 标准压缩编码新方案,获得了较高的压缩比。 西北工业大学在基于 UG 的二次开发方面进行了不少研究。 西安理工大学机械与精密仪器学院在基于 SolidWorks 的二次开发方 面也做了不少工作,开发了连杆机构和弧面分度凸轮的运动仿真软件。 上海交通大学图像处理及模式识别研究所,国防科技大学计算机研 究所, 北京工业大学 CAD 研究中心等单位也都在这一领域做了一定的工 作,并取得了一定的研究成果。 综合国内外的研究现状,为了实现构件的造型和运动仿真,采用的 方法归纳起来可分为三类【 4】 : (1).开发专业的运动软件,这种方法可以进行多种机构的运动仿真和 运动学、动力学分析。这种方法的开发工作量大,开发周期长,开发的