一种改进的延时估计距离测量方法
光纤延迟线实时高精度延迟时间测量方法

光纤延迟线实时高精度延迟时间测量方法张鑫;王克让;陈卓;姜宇航;朱晓丹【摘要】针对光纤延迟线的延迟时间测量的问题,提出一种基于线性拟合的高精度测量方法.首先采用传统频域法得到一个粗估计值,然后用此粗估计值解单一频率信号的模糊相位差,得到无模糊相位差,从而得到精估计值,最后通过提高信号频率进一步提高测量精度.理论分析及仿真表明,该方法在保证高精度测量的前提下对瞬时工作带宽要求较低,且能减小计算量,降低处理时间,为光延迟系统实时测量延迟时间提供了一种高精度方法.【期刊名称】《航天电子对抗》【年(卷),期】2017(033)006【总页数】4页(P58-61)【关键词】光纤延迟线;延迟时间测量;线性拟合【作者】张鑫;王克让;陈卓;姜宇航;朱晓丹【作者单位】中国航天科工集团8511研究所,江苏南京210007;中国航天科工集团8511研究所,江苏南京210007;中国航天科工集团8511研究所,江苏南京210007;西安电子科技大学通信工程学院,陕西西安710126;中国航天科工集团8511研究所,江苏南京210007【正文语种】中文【中图分类】TN9750 引言作为微波光子技术的一个重要应用,光纤延迟线相比传统的电延迟具有体积小、质量轻、带宽宽、损耗低、抗干扰能力强等优点[1],逐渐应用到雷达系统及电子对抗系统等领域[2],比如光纤延迟线在传统相位干涉仪中的应用,利用光纤延迟线将不同天线接收到的信号进行延迟,使系统能够分时处理各路信号,可以有效解决传统相位干涉仪设备量大、系统复杂的问题,这也是现在相位干涉仪研究领域的热点问题。
为了能够提取信号完整信息,延迟保存的时间需要达到微秒级,导致光纤的长度较长,同时光纤延迟线的延迟时间受到环境尤其是温度的影响会发生改变。
对于1000m的光纤,温度变化1℃延迟时间变化约27ps,对于频率为1GHz的信号提取相位差变化约为9.72°,而实际中温度变化远不止1℃,信号频率也大于1GHz,导致产生非常大甚至超过一个周期的额外鉴相误差。
一种改进的线性调频信号多径时延估计算法

一种改进的线性调频信号多径时延估计算法冯亚丽;刘成;张祥斌【摘要】针对分数阶傅里叶变换(Fractional Fourier Transform, FRFT)对线性调频(Linear Frequency Modulation, LFM)信号进行多径时延估计时的不足,改进了一种基于时延功率谱特征的统计FRFT时延估计算法.改进算法通过建立由估计衰减系数的叠加值和估计时延组成的二维关系图,根据时延功率谱的分布特性剔除误估的虚假径,并按照衰减系数叠加值的大小顺序读取时延估计值.最后,以ITU-R M.1225中测试环境为室内办公室的一种信道模型为传输环境,对该算法进行了仿真验证.仿真表明,在计算复杂度仅增加7倍的条件下,改进的算法能够剔除使用FRFT算法估计时延时误估的虚假径,时延估计结果较FRFT算法更精确.【期刊名称】《广东通信技术》【年(卷),期】2018(038)012【总页数】5页(P76-80)【关键词】时延估计;线性调频信号;分数阶傅里叶变换;时延功率谱;衰减系数叠加值【作者】冯亚丽;刘成;张祥斌【作者单位】重庆邮电大学通信与信息工程学院;重庆邮电大学通信与信息工程学院;重庆邮电大学通信与信息工程学院【正文语种】中文1 引言LFM信号具有高处理增益、低发射功率、抗多普勒频移等优点,所以在声纳,雷达,扩频通信,水下探测和UWB探测等领域中有着相当广泛的应用[1-4]。
对LFM信号进行时延估计是现代信号处理的一个重要组成部分。
传统的多径时延估计主要采用匹配滤波、解卷积的方法。
解卷积方法只有在信噪比足够好的时候才能很好地估计出多径信道参数[5];Bell等人提出的匹配滤波方法,其时延分辨率为sinc函数的主瓣宽度(近似于带宽的倒数),sinc函数旁瓣对多径信息的提取影响比较大[6]。
并且这些算法要求信号为平稳信号,而LFM信号为非平稳信号,所以其用来处理LFM信号存在先天不足。
随后的一些基于高阶累积量的算法,如互四阶矩最小范数时延估计算法和MUSIC时延估计算法,此类算法把非平稳信号转换为平稳信号处理,其时延分辨率高,但具有计算量太大的缺点,不适合实际使用[7]。
几种对流层延迟改正模型的分析与比较
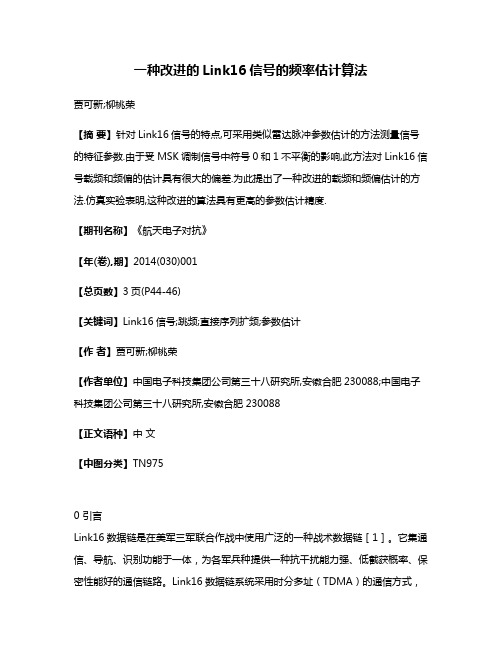
图 1 三种模型算得的 PRN26对流层延迟随高度 角变化图
摘要 :在高精度 GPS变形监测数据处理中 , GPS信号在对流层传播中的延迟是影响其精度的主要误差源之一 ,需设法对其进行改 正 。最常用的方法是使用模型改正 ,利用 V isual C + +语言 ,实现三种对流层改正模型 ,即 : Simp lified Hopfield模型 , Saastamoinen模 型 ,Modified Hopfield模型 。通过实例对它们的改正效果进行定量分析与比较 ,得出一些有益的结论 。 关键词 :对流层延迟 ;简化 Hopfield模型 ; 改进 Hopfield模型 ; Saastamoinen模型 ; N iell投影函数
5. 对于低高度角的情况 ( < 10°) ,如在 Saasta2 moinen模型中 ,可以使用对高度角更加敏感的全球 投影函数 GM F计算对流层延迟来提高 GPS测量高 程方向的精度 ,这些还需作进一步的研究 。
2. 当高度角 ≥35°时 ,简化 Hopfield模型求得的 结果小于 Saastamoinen模型 。
3. 当高度角 ≥15°时 ,三种模型求得的结果之间 符合得很好 ,改进的 Hopfield模型和 Saastamoinen模 型求得的结果完全一样 ,与简化 Hopfield模型求得的 结果差值很小 ,仅为几个毫米 ( 15°时差值最大 ,为 8 mm,其余均在 2mm左右 )。实际运用时 ,如果观测条 件好 ,截止高度角定为 15°,可任意选取这三种模型。
估计对流层延迟的单频rtk卡尔曼滤波算法

估计对流层延迟的单频rtk卡尔曼滤波算法
估计对流层延迟的单频RTK卡尔曼滤波算法是用于滤除GPS数据中的对流层延迟误差的一种重要算法。
它的基本原理是,在接收到的GPS信号中,当由于土壤特性或气象状况等原因造成对流层延迟时,信号会发生时间偏移,从而产生错误位置信息。
因此,采用单频RTK卡尔曼滤波算法可以滤除这种误差,提高定位精度。
单频RTK卡尔曼滤波算法主要包括三个部分:状态模型的建立、状态估计的更新以及状态后验估计的计算。
在状态模型的建立部分,根据GPS信号的接收机特性和发射机特性,确定具体的状态模型,这将成为状态估计的基础。
在状态估计的更新部分,根据状态模型以及历史数据,以及先验和观测信息,得到状态估计值。
最后,在状态后验估计的计算部分,通过计算状态估计值和观测信息的内积,得到状态后验估计值,这也是单频RTK卡尔曼滤波算法的一个核心环节。
此外,使用单频RTK卡尔曼滤波算法可以有效地权衡GPS数据中的误差,减少数据之间的冗余。
例如,在GNSS测量中,使用单频RTK 卡尔曼滤波算法可以减少随机误差,有效抵消因对流层延迟等原因对定位精度的影响。
总之,单频RTK卡尔曼滤波算法是利用一维滤波技术来滤除GPS 数据中的对流层延迟误差的一种重要算法,它的优势在于可以有效减少误差,改善GPS定位精度。
定位延时测试方法

定位延时测试方法主要包括以下步骤:
准备测试设备:选择合适的测试设备,如GPS接收器、RTK接收器或其他定位设备,确保设备性能稳定且符合测试要求。
确定测试环境:选择适合进行定位延时测试的环境,如开阔地、密集城区、建筑物内部等不同环境,以便进行多场景下的测试。
设备安装与设置:将测试设备安装到目标载体上,如车辆、无人机等,并进行相关参数设置,如定位模式、数据采样频率等。
测试路线规划:根据测试需求,规划合理的测试路线,包括起始点和终点坐标、转弯点、绕行区域等,确保路线覆盖各种环境和场景。
开始测试:在测试过程中,记录设备接收到的定位数据,包括时间戳、经纬度坐标等信息,并确保数据记录的准确性和完整性。
数据处理与分析:将记录的数据进行处理和分析,计算定位延时的时间、距离和频率等指标,并评估定位延时对实际应用的影响。
测试结果输出:根据数据处理和分析结果,生成定位延时的测试报告,包括测试环境、设备性能、定位模式、数据采样频率等方面的信息,以及定位延时的具体数值和评估结论。
通过以上步骤,可以完成定位延时测试并获得准确的测试结果。
需要注意的是,在进行定位延时测试时,应确保测试设备的性能稳定、测试环境的多样性以及数据处理和分析的准确性。
长度测量的6种特殊方法
长度测量的6种特殊方法
随着互联网技术的迅速发展,长度测量已经成为网络研究和开发的一个重要组
成部分,其中特别的方法被用来避免既定的、频繁的和不必要的操作。
针对这种情况,目前有6种特殊的长度测量方法可供使用:截尾式分析、苍白
指数计算、平均快速记录、半速分析、信号延迟和模型采样测量。
截尾式分析方法是一种快速可用的方法,它可以确定一段网络节点的准确长度,两个节点的距离可以很容易地从截尾报告中得出结论,因此这也成为一种高效的长度测量方法。
苍白指数计算方法可以计算出网络通信连接的总延迟,这对于快速掌握数据传
输率非常有用,它可以用来量化网络中信号强度的强弱程度,从而从而发现潜在的问题,促使网络更具有效率。
平均快速记录方法可以用来确保测量的网络节点位置准确,同时保证测量的可
靠性,而三次步进测量则能用来检验网络线路的可靠性,使网络可靠性更高和更持久,减少龙曲延迟。
信号延迟测量是一种重要的数据分析技术,它可以分析网络中的各种信号的实
时状态,更准确地识别问题,从而提供更可靠的预测和模型构建。
最后一种模型采样测量是一个强大的测量工具,它可以用来确定网络连接的延迟,即使在网络延迟很大的情况下,它仍然能够比其他类似测量工具更准确地衡量网络长度。
总之,6种特殊的长度测量方法大大提高了网络开发和研究的效率,不仅可以
避免重复操作,还可以精确衡量网络长度,促进互联网的发展。
一种改进的三点内插时延估计算法

一种改进的三点内插时延估计算法
刘丽;惠俊英
【期刊名称】《应用声学》
【年(卷),期】1999(018)006
【摘要】本文提出了一种改进的余弦曲线拟合三点内插时延估计算法,并推导了这一估计算法的方差.在带限高斯白噪声的环境下,考虑多途传播和多卜勒频移的影响,进行了计算机仿真研究.仿真结果与理论分析是一致的.该算法具有较高的时延估计精度.
【总页数】5页(P34-38)
【作者】刘丽;惠俊英
【作者单位】北京航空航天大学自动控制系,北京,100083;哈尔滨工程大学水声研究所,哈尔滨,150001
【正文语种】中文
【中图分类】O429
【相关文献】
1.一种GPS多径时延估计的改进粒子滤波算法 [J], 张婷菲;赵昀;王星然
2.一种改进的最小方差自适应时延估计算法在碰摩声发射定位中的应用 [J], 邓艾东;童航;秦康;曹浩;颜喜
3.用于时延估计的一种相关峰内插算法 [J], 黄建人
4.一种改进的线性调频信号多径时延估计算法 [J], 冯亚丽;刘成;张祥斌
5.一种改进的水声正交频分复用稀疏信道时延估计算法 [J], 强夕竹;乔钢;周锋
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进的Link16信号的频率估计算法
一种改进的Link16信号的频率估计算法贾可新;柳桃荣【摘要】针对Link16信号的特点,可采用类似雷达脉冲参数估计的方法测量信号的特征参数.由于受MSK调制信号中符号0和1不平衡的影响,此方法对Link16信号载频和频偏的估计具有很大的偏差.为此提出了一种改进的载频和频偏估计的方法.仿真实验表明,这种改进的算法具有更高的参数估计精度.【期刊名称】《航天电子对抗》【年(卷),期】2014(030)001【总页数】3页(P44-46)【关键词】Link16信号;跳频;直接序列扩频;参数估计【作者】贾可新;柳桃荣【作者单位】中国电子科技集团公司第三十八研究所,安徽合肥230088;中国电子科技集团公司第三十八研究所,安徽合肥230088【正文语种】中文【中图分类】TN9750 引言Link16数据链是在美军三军联合作战中使用广泛的一种战术数据链[1]。
它集通信、导航、识别功能于一体,为各军兵种提供一种抗干扰能力强、低截获概率、保密性能好的通信链路。
Link16数据链系统采用时分多址(TDMA)的通信方式,系统的每个成员按照统一的时间基准同步工作。
在信号传输时,采用了跳频、直接序列扩频、随机跳时、信道编码和脉冲工作等诸多抗干扰措施,具有非常强的反侦察和抗干扰性能。
在通信对抗领域,许多学者在Link16信号的检测方面做了大量的工作,如文献[2]通过理论分析和仿真实验,验证了平方倍频法检测Link16信号的可行性。
文献[3]分析了一种在低信噪比下利用延时相乘和分段相关相结合的方法检测Link16信号的算法。
然而,通信对抗并不仅仅局限于检测到Link16信号,更需要对Link16信号的各特征参数(包括单跳持续时间、功率、载波频率、带宽和频率偏移等)进行估计,为Link16信号的分选作准备。
从现在收集的资料来看,关于link16信号的参数估计的文献非常少。
本文从分析Link16的特点出发,将Link16信号看作一种特殊的频率捷变脉冲雷达信号,提出可采用类似雷达脉冲参数估计方法估计Link16信号的基本特征参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种改进的延时估计距离测量方法魏平姣1,刘纪元2,焦学峰3,徐驰1【摘要】摘要:首先对超声探头安装进行了研究,提出了提升信噪比的一种方法,再者结合现有的时延估计方法,并提出了内插和峰值检测相结合的延时估计算法,用实测的超声测距信号进行了仿真研究,通过多组测试数据统计,验证本中文提出的算法具有较高的时延估计精度。
综合在这两方面的分析研究,提出了一种改进的延时估计距离测量方法。
可以使测量得到的峰值和真实值间基本一致,使峰值检测误差减少到了5%左右,使测量误差达减少到毫米级,具有较高的测量精度。
【期刊名称】电子设计工程【年(卷),期】2012(020)022【总页数】5【关键词】信噪比;延时估计;内插;峰值检测;测距信号明渠水位测量方法有很多,有机械测量法,水声测量法,超声波测量法。
因机械测量方法存在很多人为因素,导致测量结果出现较大误差。
现在一般都采用水声和超声来测量水位,声纳系统发出声波到水面,水面反射信号到声纳系统的接收系统,根据信号的发出时刻和接收时刻的时间差,来确定水位。
由于时延估计在距离测量方面具有很大的应用价值,因而国内外有很多的学者致力于这方面的研究,目前已经取得了很多成果。
时延估计方法的种类繁多,从性能上讲也都各有千秋,在不用应用背景有时需要采用不同的时延估计方法以达到最好的估计效果。
文中对现有的一些时延估计方法进行分析,结合超声测距系统的实际情况,针对明渠超声水位测量提出一种改进的延时估计距离测量方法。
1 延时估计方法简介相关法是时延估计的基本方法,其原理是利用信号的自相关函数Rxx(τ)在τ=0的时取得最大值,该方法原理简单,计算量小,容易实现,但它的不足之处是要求信号和噪声、噪声和噪声互不相关,对非平稳信号和可变时延估计的估计误差大,甚至不能估计。
由于声纳系统收到的回波信号具有高阶相位性,幅值随时间变化的非平稳信号,且噪声是与信号是相关的,在这个应用条件下,相关法就显得不适用。
广义相关法(基于相关分析的时延估计方法)是早期的时延估计方法,它原理相对简单,在对两接收信号x1(t),x2(t)做相关函数前先进行预滤波处理,从而得到更好的时延估计值,计算量不大,而且具有一定的抗噪和抗混响能力,但是对相关性极强的周期性干扰,抑制效果不好,估计精度也不高。
自适应时延估计方法是基于自适应信号处理技术得来的,有直接法和间接法两类。
因为自适应滤波器可以根据信号的统计特性,在某种最优准则下能自动调节自身的参数,又不需要或只需要很少有关信号和噪声的先验知识,应用到很多的方面。
在延时估计方法类,还有很多其他的方法,比如最大似然估计方法,广义相位谱法,基于小波变换延时估计法,以及将其他学科的算法和延时估计算法结合得到的新的延时估计算法,这些方法为延时估计问题提供了新的研究方向,为开发新产品提供了新的方向。
2 提高超声信号的信噪比超声波是一种人耳无法听到的、频率一般超过20 kHz的声音。
当声源发出的声波向各个方向传播时,由于声源在单位时间内发出的能量是一定的,离开声源的距离越远,能量的分布面也越大,因此通过单位面积的能量就越小。
因为要应用到明渠测深中,只需探测一个物体即可,如何加强超声波的方向性,聚焦能量,延长测试距离是主要关注的。
市场中的超声探头信号发射开角越小,价格会越贵,在节约成本方面,选择开角越小的,提高远距离测试信号的信噪比,是不科学的。
系统中,采用超声传感器的开角是17°,测试距离是4 m。
在超声传感器外部安装一个喇叭形谐振器,可以来强化方向性和延长测量距离,理论上说,喇叭形谐振器,开口的直径越大总体长度就越长,方向性强度就越高,能量就越集中。
实验仿真波形如下(采样率为200kHz,采样点数为4096):无喇叭形谐振器的超声传感器2.6 m处物体反射回来的信号如图1所示。
有喇叭形谐振器的超声传感器2.6 m处物体反射回来的信号如图2所示:(内径为4.05 cm,长度为7.5 cm)。
图1与图2图形说明:前半边的波形是超声传感器起振波形,固有的盲区,只要测试距离大于这个,是不影响后面的回波信号。
从图1和图2可看出,在超声传感器外加一个喇叭形谐振器的壳体,选择合适的直径和长度,能将测试距离从4 m延长到8 m,能够提高反射回来的信号的信噪比,而且峰值附近能量聚集成馒头峰状,更有利于波形中主能量区的搜索。
3 内插和峰值检测在超声测距系统中,延时估计的精度决定了测距的精度,误差越小,系统性能越好,峰值的位置的检测的误差大小(n为量化比特数,fs为采样频率,fm为信号频率)从(1)式看出,采样频率每提高一倍,则系统中的信噪比提高3 dB。
超声测距距离公式:V声为超声波在空气中的传播速度,TS/2fs为延时时间,TS是回波信号峰值位置,fs为采样频率。
从信号角度分析,影响测距误差的是延时时间的计算。
如果采样点不是信号的峰值.我们找到的峰值位置就是有误差的,为了减少误差,就必须要采样频率无穷高才能保证不会漏掉任何有用的峰值。
发现奈奎斯特-香农定理只是在"最佳"情况下能保证100%完美.如果采样点正好是在正弦波交零处,采样值为零,采样失真就是100%,完美率为0。
但如果把采样频率提高一倍,最坏的情况也能保证50%完美。
最大失真为50%,平均失真为25%。
信号以20 kHz为限,分别用大于2倍采样率进行采样,对应的失真关系如表1所示。
决定了延时估计的误差大小,而采样频率的大小决定了峰值位置精度大小。
采样频率与信噪比的关系如下:这样,采样频率升到1 MHz时,采样率频率是信号频率的64倍,失真才降到1%级别。
但是在实际运用中,对于待检测信号如果采样频率选取过高,将产生过饱和现象,还有对硬件电路要求过高,成本开销过大,一味的提高采样频率,来减少误差是不可取的。
在时延估计之前采用“包络法进行峰值检测,可粗略地确定峰值时刻,为提高时延估计精度,在选择合适的抽样频率时,还需对时延信号进行内插计算。
3.1 内插法3.1.1 线性插值线性插值是代数插值最简单的形式,指的是用线性一元函数g(x)=ax+b,近似代替f(x),其几何意义是通过求出函数f(x)上的两点A(x0,y0),B (x1,y1)的直线近似代替 f(x)将 A(x0,y0),B(x1,y1)代入 g(x)=ax+b线性插值误差说明:1)f(x)为线性函数,求得的 y 值没有误差;2)f(x)为非线性函数,求得的 y 值有 df误差①只要在误差允许的范围内,均可采用线性内插。
②对非线性函数,表间距越小,利用线性内插求得的函数值的误差越小。
3.1.2 抛物线插值算法抛物线插值又称为二次插值,它是以一元二次多项式去拟合某一段曲线。
如图4所示。
已知一条曲线y=f(x)上的3 点A(x0,y0),B(x1,y1),C(x2,y2)过此三点可以作一抛物线,即一条二次曲线g(x),且是唯一的。
将 A(x0,y0),B(x1,y1),C(x2,y2),代入式(6),可得下列方程组:解此方程组可得 g(x)的系数 a,b,c,但是运算很复杂,在实际计算中,可以把g(x)写成各种形式的二次多项式,然后用待定系数法把g(x)确定下来,鉴于应用的方便性,本文讨论下逐次线性插值形式的g(x)。
逐次线性插值形式的g(x)算法逐次线性插值形式的g(x)算法是分4步,逐次得出计算公式。
已知 3 点 A(x0,y0),B(x1,y1),C(x2,y2)及内插点 F(x,y)第 1 步:过点 A(x0,y0),B(x1,y1)做直线 Lg(x01),即第 3 步:过特殊的两点(x1,Lg(x01)),(x2,Lg(x02))做直线,记为Lg (x012),即第 2 步:过点 A(x0,y0),C(x2,y2)做直线 Lg(x02),即第 4 步:将式(11),(12)代入式(13),得二次插值多项式g(x)因超声波回波信号函数是非线性的,用线性插值误差比较大,系统选用抛物线内插法。
4 计算机仿真将实测的超深回波信号,中心频率为40 kHz,对不同采样频率的信号,用抛物线内插法进行计算机仿真研究,并于线性内插法进行比较。
在室内进行测试,常温下,声速为340 m/s,超声波液位计安装于距靶面2.6 m处,让超声波液位计的中心线垂直于被测靶面中心线如图5所示。
从如图安装方式采集到的信号,分别以80 kHz,120 kHz,160 kHz,200 kHz的采样频率对信号进行采样,并分别对同一频率的采样信号,用线性内插法和抛物线内插法进行仿真研究比较。
分别列表如表2~表5,并比较下误差的大小。
5 结束语文中通过对超声信号能量的聚焦,便于主能量区的检测,选择合适的采样率,原信号是40 kHz,用5倍原信号的频率进行采样,该采样率在硬件上可实现,然后用抛物线内插法进行分析,使峰值检测误差减少到了5%左右,使测量误差达到毫米级,满足工业标定的测量误差,可以应用于产品设计。
参考文献:[1]翟国富,刘茂恺.一种实时高精度的机器人用超声波测距处理方法[J].应用声学,1990(1):17-24.ZHAI Guo-fu,LIU Mao-kai.A real time high precision robot using the method of ultrasonic distance measurement[J].Applied Acoustics,1990(1):17-24.[2]王春麟.提高超声回波检测测距精度的方法[J].电测与仪表,1995(2):22-24.WANG Chun-lin.A method is to improve the precision of ultrasonic echo detection[J].Electrical Measurement&Instrumentation,1995(2):22-24.[3]童峰.高精度超声测距系统研究[D].厦门:厦门大学海洋学系,1997.[4]行鸿彦,刘照泉,万明习.基于小波变换的广义相关时延估计算法[J].声学学报,2002,27(1):88-93.XING Hong-yan,LIU Zhao-quan,WAN Ming-xi.The generalized correlation time delay estimation algorithm based on wavelet transform[J].Acta Acustica,2002,27(1):88-93.[5]孙进才,朱维杰,肖卉,等.基于信号相位匹配原理的广义相关时延估计[J].自然科学进展,2005,15(1):103-109.SUN Jin-cai,ZHU Wei-jie,XIAO Hui,et al.The generalized corr-elation time delay estimation based on the signal phase mat-ching principle[J].Progress in Natural Science,2005,15(1):103-109.[6]苏炜,龚壁建,潘笑.超声波测距误差分析[J].传感器技术学报,2004,23(06):8-11.SU Wei,GONG Bi-jian,PAN Xiao.Error analysis of ultrasonic distance measurement[J].Chinses Journal of Sensors and Actuators,2004,23(6):8-11.[7]张岭旭,朱志军.数字相关法测时差的工程实现[J].航天电子对抗.2006,22(6):42.ZHANG Ling-xu,ZHU Zhi-jun.The engineering realization of measuring time-delay using digital correlation method[J].Aerospace Electronic Warfare,2006,22(6):42.[8]王兆华.二维抽取和内插[J].信号处理,1987,3 (4):215-221.WANG Zhao-hua.The decimation and interpolation in the two-dimension[J].Signal Processing,1987,3(4):215-221.。