极坐标指令
cad极坐标指令

在CAD软件中,使用极坐标指令可以方便地指定点的位置,特别是当你知道点与坐标系原点的距离和角度时。
在AutoCAD中,使用极坐标的方法如下:
1. 输入`POINT` 命令,或者直接按`P` 键。
2. 当你处于点模式时,输入点的极坐标值。
极坐标由距离和角度组成,用`<` 符号分隔。
例如,要指定一个距离为10,角度为30度的点,你只需要输入`10<30`。
3. 按回车键确认点的输入。
如果你想要相对于当前点使用极坐标,可以先输入`@` 符号,然后跟上距离和角度。
例如,如果当前点是(0,0),要指定一个相对距离为10,角度为30度的点,你可以输入`@10<30`。
此外,你也可以在动态输入框中直接输入极坐标。
如果你想要使用动态输入,可以先打开动态输入工具栏,然后直接在动态输入框中输入距离和角度,按回车键确认。
请注意,不同CAD软件的操作可能略有不同,但基本原理是一致的。
如果你使用的CAD软件与AutoCAD有所不同,请参考该软件的帮助文档或在线教程以获取具体的操作指南。
数控铣床编程指令

数控铣床编程指令Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998数控铣床编程指令4.2.2子程序1、坐标轴运动(插补)功能指令(1)点定位指令G00点定位指令(G00)为刀具以快速移动速度移动到用绝对值指令或增量值指令指定的工件坐标系中的位置。
指令格式:G00X—Y—Z一;式中X—Y—Z一为目标点坐标。
以绝对值指令编程时,刀具移动到终点的坐标值;以增量值指令编程时,指刀具移动的距离,用符号表示方向。
使用G00指令用法如下。
如上图所示,刀具由A点快速定位到B 点其程序为:G00G90X120.Y60.;(绝对坐标编程)(2)直线插补指令G01用G01指定直线进给,其作用是指令两个坐标或三个坐标以联动的方式,按指定的进给速度F,从当前所在位置沿直线移动到指令给出的目标位置,插补加工出任意斜率的平面或空间直线。
指令格式:G0lX—Y—Z—F一;程序段G01X10.Y20.Z20.F80.使刀具从当前位置以80mm/min的进给速度沿直线运动到(10,20,20)的位置。
例3:假设当前刀具所在点为.,则如下程序段N1G;.;将使刀具走出如图所示轨迹。
(3)圆弧插补指令G02和G03G02表示按指定速度进给的顺时针圆弧插补指令,G03表示按指定速度进给的逆时针圆弧插补指令。
顺圆、逆圆的判别方法是:沿着不在圆弧平面内的坐标轴由正方向向负方向看去,顺时针方向为G02,逆时针方向为G03,序格式:XY平面:G17G02X~Y~I~J~(R~)F~G17G03X~Y~I~J~(R~)F~ZX平面:G18G02X~Z~I~K~(R~)F~G18G03X~Z~I~K~(R~)F~G19G02Z~Y~J~K~(R~)F~G19G03Z~Y~J~K~(R~)F~式中X、Y、Z为圆弧终点坐标值,可以用绝对值,也可以用增量值,由G90或G91决定。
由I、J、K方式编圆弧时,I、J、K表示圆心相对于圆弧起点在X、Y、Z轴方向上的增量值。
数控铣床编程指令

数控铣床编程指令 Prepared on 24 November 2020数控铣床编程指令4.2.2子程序1、坐标轴运动(插补)功能指令(1)点定位指令G00点定位指令(G00)为刀具以快速移动速度移动到用绝对值指令或增量值指令指定的工件坐标系中的位置。
指令格式:G00X—Y—Z一;式中X—Y—Z一为目标点坐标。
以绝对值指令编程时,刀具移动到终点的坐标值;以增量值指令编程时,指刀具移动的距离,用符号表示方向。
使用G00指令用法如下。
如上图所示,刀具由A点快速定位到B 点其程序为:G00G90X120.Y60.;(绝对坐标编程)(2)直线插补指令G01用G01指定直线进给,其作用是指令两个坐标或三个坐标以联动的方式,按指定的进给速度F,从当前所在位置沿直线移动到指令给出的目标位置,插补加工出任意斜率的平面或空间直线。
指令格式:G0lX—Y—Z—F一;程序段G01X10.Y20.Z20.F80.使刀具从当前位置以80mm/min的进给速度沿直线运动到(10,20,20)的位置。
例3:假设当前刀具所在点为.,则如下程序段N1G;.;将使刀具走出如图所示轨迹。
(3)圆弧插补指令G02和G03G02表示按指定速度进给的顺时针圆弧插补指令,G03表示按指定速度进给的逆时针圆弧插补指令。
顺圆、逆圆的判别方法是:沿着不在圆弧平面内的坐标轴由正方向向负方向看去,顺时针方向为G02,逆时针方向为G03,序格式:XY平面:G17G02X~Y~I~J~(R~)F~G17G03X~Y~I~J~(R~)F~ZX平面:G18G02X~Z~I~K~(R~)F~G18G03X~Z~I~K~(R~)F~G19G02Z~Y~J~K~(R~)F~G19G03Z~Y~J~K~(R~)F~式中X、Y、Z为圆弧终点坐标值,可以用绝对值,也可以用增量值,由G90或G91决定。
由I、J、K方式编圆弧时,I、J、K表示圆心相对于圆弧起点在X、Y、Z轴方向上的增量值。
各种数控指令的用法介绍

更多资料请访咨询.(.....)数控程序的指令由一系列的程序字组成,而程序字通常由地址〔address〕和数值〔number〕两局部组成,地址通常是某个大写字母。
数控程序中的地址代码意义如表1所示。
表1数控程序中的每一个指令都有一定的固定格式,使用不同的数控机床的指令格式也不同,因此需要按照该数控机床的指令格式来编写数控指令。
一般的数控机床能够选择公制单位毫米〔mm〕或者英制单位英寸〔inch〕为数值单位。
公制能够精确到0.001mm,英制能够精确到0.0001in,这也是一般数控机床的最小移动量。
表2列出了一般数控机床所能输进的指令数值范围,而数控机床实际使用范围受到机床本身的限制,因此需要参考数控机床的操作手册而定。
例如表中X轴能够移动±99999.999mm,但实际上数控机床的X轴行程可能只有650mm,进给速率F最大可输进100000.0mm/min,但实际上数控机床可能限制在3000mm/min以下。
因此在编制数控程序时,一定要参照数控机床的使用讲明书。
表2下面简要介绍各种数控指令的用法。
1.顺序号字顺序号字也称程序段号。
在程序段之首,以字母N开头,其后为一个2~4位的数字。
需要注重的是,数控程序是按程序段的排列次序执行的,与顺序段号的大小次序无关,即程序段号实际上只是程序段的名称,而不是程序段执行的先后次序。
2.预备功能字以字母G开头,后接一个两位数字,因此又称为G指令。
它是操纵机床运动的要紧功能类不。
常用的G指令有以下几种。
〔1〕G00:快速点定位,即刀具快速移动到指定坐标,用于刀具在非切削状态下的快速移动,其移动速度取决于机床本身的技术参数。
如刀具快速移动到点〔100,100,100〕的指令格式为:〔2〕G01:直线插补,即刀具以指定的速度直线运动到指定的坐标位置,是进行切削运动的两种要紧方式之一。
如刀具以250mm/min的速度直线插补运动到点〔100,100,100〕的指令格式为:G01X100.0Y100.0Z100.0F250〔3〕G02、G03:顺时针和逆时针圆弧插补,即刀具以指定的速度以圆弧运动到指定的位置。
FANUC G指令列表

05
每分钟进给速度
G99
每转进给速度
支持的
代码
意义
格式
M00
停止程序运行
M01
选择性停止
M02
结束程序运行
M03
主轴正向转动开始
M04
主轴反向转动开始
M05
主轴停止转动
M06
换刀指令
M06 T--
M08
冷却液开启
M09
冷却液关闭
M30
结束程序运行且返回程序开头
M98
子程序调用
M98Pxxnnnn
√
√
G86
√
G19
√
G57
√
√
G88
√
G20
√
√
G58
√
√
G89
√
G21
√
√
√
√
G90
√
√
G30
√
√
G68
√
G91
√
G31
√
√
G69
√
G92
√
√
G34
√
G70
√
G94
√
G40
√
√
G71
√
G98
√
√
G41
√
√
G72
√
G99
√
√
G42
√
√
G73
√
√
G43
√
G74
√
√
G
1
代码
分组
意义
格式
G00
01
快速进给、定位
设定局部坐标系
数控铣削--极坐标指令编程课件

使用极坐标指令编写程序。
三、极坐标指令讲解
功能:
可实现终点坐标值用极坐标(半径和角度)输入。
举例:
G54坐标系中 X _ 代表X轴坐标
B
Y
Y _ 代表Y轴坐标
极坐标指令中 X _ 代表半径
Y _ 代表角度
B点坐标 G54坐标系 X-25Y43.3
极坐标系 X50Y120
1.定加工方案与加工路线 采用一次装夹完成加工方案。
2.工件的定位及装夹 采用平口虎钳装夹,底部用等 高垫块垫高。
3.刀具的选用
序号 刀具规格 数量 备注
1
φ16mm
1
铣削加工
二、加工工艺分析及制定
4、确定切削用量 (1)主轴转速:刀具采用高速钢
材料时,在加工中主轴转速可取 1000r/min。
(2)进给速度:为了保证刀具的 使用寿命,在加工中,一般取进给 速度的100—150 mm/min。
C
C点坐标 G54坐标系 X-25Y-43.3
极坐标系 X50Y240
Ax
三、极坐标指令讲解
格式:G17/G18/G19 G90/G91 G16;开启极坐标功能
G01 X _ Y _ F _;
G00 X _ Y _(Z_);
极坐标指令
‥‥;
G15;
取消极坐标功能
G17,G18 或G19 极坐标指令的平面选择
: 举例 终点1
角度
角度可以用绝对值指令
起始点 或相对值指令(G90,
G91)吗?
角度
终点2
三、极坐标指令讲解
用G90指定工件坐标系的零点作为极坐标系的原点时,角
度用绝对值和相对值编程用法有什么不同?
极坐标指令.
例5-3 用极坐标系指令编程圆周钻孔程序,零件如图所示。三孔均布。
1.半径和角度均为绝对值指令时 N10 N20 G17 G90 G16;
极坐标指令有效0 -5 F200;第1孔,30°
N30 N40
N50
Y150; Y270;
G15 G80;
第2孔,150° 第3孔,270° 取消极坐标指令
2)半径是绝对值指令,角度为增量值指令时 N10 G17 G16; N30 G9l Y120; N40 Y120; N50 G15 G80;
极坐标指令有效,XY平面 第1孔,30°
N20 G81 G90 X100 Y30 Z-20 R-5 F200;
第2孔,距第1孔,120° 第3孔,距第2孔,120° 取消极坐标指令
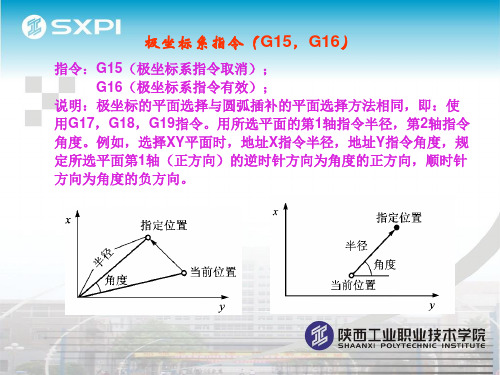
极坐标系指令(G15,G16)
指令:G15(极坐标系指令取消); G16(极坐标系指令有效); 说明:极坐标的平面选择与圆弧插补的平面选择方法相同,即:使 用G17,G18,G19指令。用所选平面的第1轴指令半径,第2轴指令 角度。例如,选择XY平面时,地址X指令半径,地址Y指令角度,规 定所选平面第1轴(正方向)的逆时针方向为角度的正方向,顺时针 方向为角度的负方向。
FANUC 系统极坐标编程

阮洪涛
教学目标及重难点
教学目标 • 能够利用极坐标指令编程和加工
教学重点
• 极坐标编程的建立与取消步骤 • 掌握极坐标编程方法及应用
教学难点
• 掌握极坐标指令在G90/G91方式下的区别
• 掌握极坐标编程在数控编程加工中的灵活应 用
在实际加工中,我们经常会遇到下图所示的以多 边形的零件。
(2)极坐标角度:用G17平面的第二坐标地址Y来指定 极坐标角度,极坐标的零度方向为第一坐标轴的正 向,逆时针为正。
例如:G16; G01 X36.Y30.; G02/G03 X___Y___R___; G15;
极坐标编程实例
极坐标编程加工正六边形,铣削深度8mm
O0001;(∮16立铣刀) G90 G54 GO0 G40 G15; S800 M03; Z150.; X40.Y-60.; G01 Z5.; G01 Z-8.F150; G16; G41 G01 X45.Y300 D01;点A G90 X45. Y240;点B (G91 Y-60;) Y180; 点C (Y-60;)
谢谢!
Y120;点D (Y-60;)
Y60; 点E (Y-60;)
Y0; 点F (Y-60;)
Y-60;点A (Y-60;)
G15;
(G90 G15;)
G40 X40.Y-60.;
G00 Z100.;
M05;
M30;
思考与练习
▪ 1.什么样的零件适合用极坐标指令编程加工?
通常,圆周分布的孔、槽类零件(如法兰类 零件)以及其他图样尺寸以半径与角度形式标注 的零件(如正多边形零件),都可以采用极坐标 编程。
2.作业:极坐标编程加工法兰盘,厚度为8mm通槽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
极坐标指令
一、FANUC系统极坐标指令(G15、G16)
G15——取消极坐标指令,取消极坐标方式
G16——极坐标指令
1、功能
终点的坐标值可以用极坐标(半径和角度)输入。
角度的正向是所选平面的第一轴正向的逆时针转向,而负向是沿顺时针转动的转向。
半径和角度两者可以用绝对值指令或增量值指令(G90、G91)。
2、指令格式
G16
.
G15
3、说明
(1)设定工件坐标系零点作为极坐标系的原点。
用绝对值编程指令指定半径(零点和编程点之间的距离)。
(2)设定当前位置作为极坐标系的原点。
用增量值编程指令指定半径(当前位置和编程点之间的距离)。
(3)用绝对值指令指定角度和半径。
X——半径值
Y——角度值
(4)用增量值指令指定角度和绝对值指令指定极径。
G90、G91混和编程。
(5)限制
在极坐标方式中,对于圆弧插补或螺旋线切削(G02、G03)用R指定半径。
在极坐标方式中不能指定任意角度倒角和拐角圆弧过渡。
二、SIEMENS系统极坐标指令(G110/G111/G112)
1、指令解释
G110:极坐标参数,相对于刀具最近到达的位置点定义极点。
G111:极坐标参数,相对于当前工件坐标系的原点定义极点。
G112:极坐标参数,相对于上一个有效极点定义极点。
AP=______:极角
RP=______:极半径
2、定义极点坐标
(1)在直角坐标系中定义极点:G110/G111/G112 X_____Y_____Z_____
(2)在极坐标系中定义极点:G110/G111/G112 AP=____ RP=____
3、在极坐标系中位移指令的编程格式
(1)极坐标系里的快速移动指令编程:G00 AP=____ RP=___
(2)极坐标系里的直线插补指令编程:G01 AP=____ RP=___
(3)极坐标系里的顺圆插补指令编程:G02 AP=____ RP=___
(4)极坐标系里的逆圆插补指令编程:G03 AP=____ RP=___
三、极坐标系指令编程举例
以正六边形为例,设工件编程原点在正六边形图形上表面中心,坐标系为G54。
1、FANUC系统极坐标指令编程(G15、G16)
G54G90G40G17G15G0Z100 X35Y0
Z10
M03S400
M08G01Z-5F30
G42G01X25Y0D1F60
G16
Y60
Y120
Y180
Y240
Y300
Y360
G15
G40G01X35Y0
G0Z100
M30
2、SIEMENS系统极坐标指令编程(G110/G111/G112)(1)G110
G54G90G40G17G0Z100X35Y0
Z10
M03S400
M08
G110X0Y0
G01Z-5F30
G42G01AP=180RP=10D1F6
G110X0Y0
AP=120RP=25
G110X0Y0 AP=180RP=25 G110X0Y0 AP=240RP=25 G110X0Y0 AP=-60RP=25G110X0Y0
AP=0RP=25
G110X0Y0
AP=60RP=25
Y10
G40G01X35Y0
G0Z100
M05
M09
M30
(2)G111
G54G90G40G17G0Z100 X35Y0
Z10
M03S400
M08
G111X0Y0G01Z-5F30
G42G01RP=25AP=0D1F60
AP=60
AP=120
AP=180
AP=240
AP=300
AP=360
Y10
G40G01X35Y0
G0Z100
M05
M09
M30
(3)G112
G54G90G40G17G0Z100 X35Y0
Z10
M03S400
M08
G110X0Y0G01Z-5F30
G42G01AP=180RP=10D1F6
G112X-10Y0
AP=120RP=25
G112X-12.5Y=25*SIN
(60)
AP=180RP=25
G112X-25Y=0
AP=240RP=25
G112X-12.5Y=-25*SIN
(60)
AP=-60RP=25
G112X12.5Y=-25*SIN
(60)
AP=0RP=25 G112X25Y=0 AP=60RP=25Y10
G40G01X35Y0
G0Z100
M05
M09
M30
(学习的目的是增长知识,提高能力,相信一分耕耘一分收获,努力就一定可以获得应有的回报)。