NL-means
图像处理中的图像去噪算法综述

图像处理中的图像去噪算法综述随着现代科技的发展,图像处理在各个领域得到了广泛应用。
然而,由于图像采集过程中受到的噪声干扰,导致图像质量下降,降低了后续处理和分析的准确性和可靠性。
因此,图像去噪算法的研究和应用成为图像处理的重要方向之一。
图像去噪算法的目标是从包含噪声的图像中恢复原始图像,以降低噪声对图像质量的影响。
在实际应用中,图像噪声的类型和分布往往是复杂多样的,因此需要选择适合不同场景的去噪算法。
以下将对几种常见的图像去噪算法进行综述。
1. 统计学方法统计学方法通过建立噪声的统计模型来进行图像去噪。
常用的统计学方法包括高斯滤波、中值滤波和均值滤波。
高斯滤波是一种线性滤波器,通过对图像进行平滑处理来减少噪声。
中值滤波则是通过取窗口内像素的中值来代替当前像素值,从而降低噪声的影响。
均值滤波是将像素周围邻域内像素的平均值作为当前像素的新值。
2. 基于小波变换的方法小波变换是一种将信号分解成多个频带的方法,可以对图像进行多尺度分析。
基于小波变换的图像去噪方法通过去除高频小波系数中的噪声信息来恢复原始图像。
常用的小波去噪算法有基于硬阈值法和软阈值法。
硬阈值法通过对小波系数进行阈值处理,将小于阈值的系数设为0,大于阈值的系数保留。
而软阈值法在硬阈值法的基础上引入了一个平滑因子,将小于阈值的系数降低到一个较小的值。
3. 基于局部统计的方法基于局部统计的方法利用图像局部区域的统计特性来去除噪声。
其中,非局部均值算法(NL-means)是一种广泛应用的图像去噪算法。
NL-means 算法通过从图像中寻找与当前像素相似的局部区域,然后根据这些相似区域的信息对当前像素进行去噪。
该算法的优点是对各种类型的噪声都有较好的去除效果,并且能够保持图像的细节信息。
4. 基于深度学习的方法近年来,深度学习在各个领域得到了广泛应用,包括图像去噪领域。
基于深度学习的图像去噪方法通过训练一个适应性的神经网络来学习图像噪声和图像的复杂关系,从而实现去噪效果。
非局部均值图像去噪算法

若需要附件请联系: QQ:2013198460 E_mail:juefeiimage@
式中, I 为受噪声污染的图像; NL 为经过 NL-means 图像去噪后的图像; ni (i 1, 2,3) 表示图像 的第 ni ( ni 为像素点坐标)个像素点, I (ni ) 为其对应灰度值, R(ni ) 和 S (ni ) 分别为以 ni 为中心的相 似窗和搜索窗; (n1 , n2 ) 和 d (n1 , n2 ) 分别表示 R(n1 ) 与 R(n2 ) 相似程度和欧氏距离(两个图像块的欧 式距离为两图像块差的平方和) , h 为衰减参数。 (2)非局部均值算法中参数设置 非局部均值一共有 3 个参数:相似窗 R(ni ) 的大小、搜索窗 S (ni ) 的大小、衰减参数 h 的取值。 这三个参数取值是相互影响,共同作用于 NL-means 的去噪效果:相思窗 R(ni ) 的取值决定使用多大 的窗口进行相似性度量,相似窗过小时大部分相似窗之间的欧氏距离相近,无法区分是否相似,过 大时计算复杂度过高;搜索窗 S (ni ) 的取值决定使用多大的窗口寻找相似窗, 搜索窗过小时可能找不 到足够的相似窗,过大时则计算复杂度过高,理论上,搜索窗为全图时去噪效果最好,但事实并非 这样,搜索窗过大反而会使去噪精度下降(欧氏距离度量相似性的原因) ;衰减参数 h 实际是一个阈 值的作用,当两个相似窗的欧式距离小于 h 时则判定为相似(占得权重 (n1 , n2 ) 较大) ,否则判定为 不相似 (占的权重 (n1 , n2 ) 较小) 。 因此, 增大相似窗 R(ni ) 的大小, 减小 h 的大小, 增大搜索窗 S (ni ) 的大小, 三者对 NL-means 去噪精度的提升可达到同样的效果。 前人大量实验得到三个参数的取值:
声呐信号处理算法

声呐信号处理算法是指对声呐信号进行一系列处理步骤的算法,主要包括信号的采集、预处理、特征提取和分类识别等。
在声呐信号处理中,常用的算法包括非局部均值(NL-means)去噪、BM3D、SAR-BM3D 等方法。
这些方法主要应用于对声呐图像进行去噪处理,以最大程度地保持图像的细节特征。
其中,非局部均值方法的基本思想是:当前像素的估计值由图像中与它具有相似邻域结构的像素加权平均得到。
BM3D 和SAR-BM3D等算法则是在BM3D算法的基础上,结合SAR图像的特点进行改进,用于对SAR图像进行去噪处理。
另外,深度学习技术也被广泛应用于声呐信号处理中。
例如,基于卷积神经网络(CNN)的算法可以用于对声呐信号进行分类、聚类等处理。
这些算法可以通过学习输入数据的统计规律来得出识别结果,有效地对声呐信号进行处理和分析。
除此之外,还有一些其他的声呐信号处理算法,如短时傅里叶变换(STFT)、小波变换(Wavelet Transform)等。
这些算法可以用于对声呐信号进行时频分析、特征提取等处理。
总的来说,声呐信号处理算法是声呐技术中非常重要的组成部分,可以有效地对声呐信号进行处理和分析,为后续的目标识别、分类等任务提供有力的支持。
图像去噪算法:NL-Means和BM3D

图像去噪算法:NL-Means 和BM3D图像去噪是⾮常基础也是⾮常必要的研究,去噪常常在更⾼级的图像处理之前进⾏,是图像处理的基础。
可惜的是,⽬前去噪算法并没有很好的解决⽅案,实际应⽤中,更多的是在效果和运算复杂度之间求得⼀个平衡,再⼀次验证了我⽼师的⼀句话:所有的⼯程问题最后都是最优化问题。
好了,废话不多说,来看看效果⽐较好的去噪算法吧。
噪声模型图像中噪声的来源有许多种,这些噪声来源于图像采集、传输、压缩等各个⽅⾯。
噪声的种类也各不相同,⽐如椒盐噪声,⾼斯噪声等,针对不同的噪声有不同的处理算法。
对于输⼊的带有噪声的图像v(x),其加性噪声可以⽤⼀个⽅程来表⽰:其中是原来没有噪声的图像。
是像素集合,是加项噪声项,代表噪声带来的影响。
是像素的集合,也就是整幅图像。
从这个公式可以看出,噪声是直接叠加在原始图像上的,这个噪声可以是椒盐噪声、⾼斯噪声。
理论上来说,如果能够精确地获得噪声,⽤输⼊图像减去噪声就可以恢复出原始图像。
但现实往往很⾻感,除⾮明确地知道噪声⽣成的⽅式,否则噪声很难单独求出来。
⼯程上,图像中的噪声常常⽤⾼斯噪声来近似表⽰,其中,是噪声的⽅差,越⼤,噪声越⼤。
⼀个有效的去除⾼斯噪声的⽅式是图像求平均,对N 幅相同的图像求平均的结果将使得⾼斯噪声的⽅差降低到原来的N 分之⼀,现在效果⽐较好的去噪算法都是基于这⼀思想来进⾏算法设计。
NL-Means 算法NL-Means 的全称是:Non-Local Means ,直译过来是⾮局部平均,在2005年由Baudes 提出,该算法使⽤⾃然图像中普遍存在的冗余信息来去噪声。
与常⽤的双线性滤波、中值滤波等利⽤图像局部信息来滤波不同的是,它利⽤了整幅图像来进⾏去噪,以图像块为单位在图像中寻找相似区域,再对这些区域求平均,能够⽐较好地去掉图像中存在的⾼斯噪声。
NL-Means 的滤波过程可以⽤下⾯公式来表⽰:在这个公式中,是⼀个权重,表⽰在原始图像中,像素 和像素 的相似度。
基于非局部均值滤波的SAR图像去噪_易子麟
第34卷第4期电子与信息学报Vol.34No.4 2012年4月Journal of Electronics & Information Technology Apr. 2012基于非局部均值滤波的SAR图像去噪易子麟尹东胡安洲张荣*(中国科学技术大学电子工程与信息科学系合肥 230027)摘要:该文提出一种基于结构相似性指数(SSIM)的非局部均值(Non Local means, NL-means)滤波的合成孔径雷达(SAR)图像相干斑噪声抑制新方法。
该方法用SSIM改进NL-means算法中小块相似性的度量,能利用结构信息来进行相干斑抑制。
通过在真实SAR图像上的实验表明,与GammaMAP滤波、CHMT算法、BLS-GSM算法、NL-means滤波相比,此方法在有效去除相干斑噪声的同时能更好地保持边缘结构信息。
关键词:合成孔径雷达图像;图像去噪;结构相似性指数;非局部均值中图分类号:TP751 文献标识码: A 文章编号:1009-5896(2012)04-0950-06 DOI: 10.3724/SP.J.1146.2011.00918SAR Image Despeckling Based on Non-local Means FilterYi Zi-lin Yin Dong Hu An-zhou Zhang Rong(Department of Electronic Engineering and Information Science, USTC, Hefei 230027, China)Abstract: This paper proposes a new speckle reduction algorithm for Synthetic Aperture Radar (SAR) images. It is based on the Non Local (NL) means filter and improved by Structural SIMilarity (SSIM). Structure information is introduced into the despeckling method by measuring the similarity between small patches with SSIM. Some experiments on real SAR images, comparing with GammaMAP filter, Contourlet Hidden Markov Tree (CHMT) method, Bayes Least Squares-Gaussian Scale Mixtures (BLS-GSM) method and NL-means filter, demonstrate that the proposed algorithm is able to reduce efficiently speckle while retain edges and structures well.Key words: SAR image; Despeckling; Structural SIMilarity (SSIM); Non Local means (NL-means)1 引言合成孔径雷达(SAR)是一种主动式微波遥感器,由于具有全天时、全天候成像、高空间分辨率和强穿透能力等优点,被广泛应用到军事和民用各领域。
几种不同权值实现的k-means聚类算法比较
T -D F I F函数 表达 式作 为特征 权重 计算 函数 , 用广 泛 , 应 效 果 较好 , 从实 验情 况来看 , 形式 简单 , 它 并且 较好 地代 表 了文档
的特性 。公式 如下 :
.
I I I L
Ⅱ 0 …l . 4 I l _ _ J . ‘
… … ”
图 4 幅 度 相 关 调 序分 离 信 号 的 波 形 图
[ ] U D AD IT. a i ta df e - on o lxI A a 5 H L AN AL Grde n xd p itcmpe C — n i l gr h ae nk r ssmai zt n [ . c ieL ann r oi msb sdo u oi t t xmi i a o C] Ma hn e rigf o
。 ‘
. . 。。. . ’ . , .
I ’
一
4 结束 语
本文 较 全 面地 阐述 了影 响 卷积混 合 频域 语音 盲 分离 性能 的排 序 和幅度不 确定性 问题 , 提 出了具体 的解决 方案 。通过 并 把 基于能量 相关 调序方 法 的 C MN盲 分离算 法应用 到实 际环境 的卷 积混合 语音信 号盲 分离 , 验证 了该 算法有 效并 可获得 比基 于 幅度 相关 调序 方法更 好 的分离效 果 。
参 考 文 献
11 。 l -
.
口
10 00
2叩 0
30 00
4 0 00
5 0 00
6 0 00
70 00
80 00
[ ] J q ' C, 1 U qEN HER L .l d e aain o ore ,at lAn AU T JBi sprt fsucs P r : n o a a t e agr h ae n n uo mei rhtcue[ ] inl d pi oi m b sd o e rmi t ac i tr J . g a v l t c e S
局部滤波
一个基于当下nonlocal-means图像去噪算法zhaiyao图像去噪是一个至关重要的步骤来提高图像质量和提高性能定量成像分析所需的所有任务。
外地(NL)意味着过滤器去噪图像纹理的一个非常成功的技术。
然而,该算法只是定义了翻译不考虑为每个图像定位和规模补丁。
在本文中,我们介绍了Zernike时刻NL-means过滤器,这是级一组正交复杂图像的时刻。
Zernike时刻在小地方的窗户图像中每个像素计算获得当地的结构信息对于每一个补丁,然后根据这些信息的相似之处而不是像素强度计算。
的旋转不变Zernike时刻,我们可以得到更多的像素或与更高的相似性度量,使补丁相似的补丁平移不变和旋转不变。
该算法是展示了真实图像被高斯白噪声污染)。
比较实验结果表明,改进的NL-means滤波器达到更好的去噪的性能。
关键词:信息检索图像去噪外地意味着过滤器Zernike时刻旋转不变1。
介绍作为图像处理的一个经典问题,图像去噪一直是使用不同的方法来解决。
在同一时间,减少噪声和模糊提出了非线性局部平均方法如非线性扩散过滤器[1]和双边过滤器(2、3)。
最近,Buades et al。
[4]介绍了NLmeans算法,一种新的非线性滤波方法相似邻域滤波。
基于NL-means过滤器周期性的冗余属性图像、纹理图像或自然图像去除噪声。
该方法本质上是一个社区过滤器,吵闹的greyvalues取而代之的是加权平均(平均)grey-values整个喧闹的形象,权重由邻域相似性的图像吗补丁。
换句话说,NL-means过滤器可以查看附近的一个极端的例子与无限的过滤器内核空间和邻居的相似的地方强度是代替逐点地相似grey-values如常用双边过滤。
在古典NL-means算法,让我代表网格图像的恢复强度NL(u)(我)像素,是所有像素的加权平均强度值的离散噪声图像u = {你(我)|我∈}定义作为问(u)(i)=和参数h作为一定程度的过滤。
它控制指数函数的衰减。
水声技术▏黄海宁等:基于形状特征的水声图像小目标识别方法
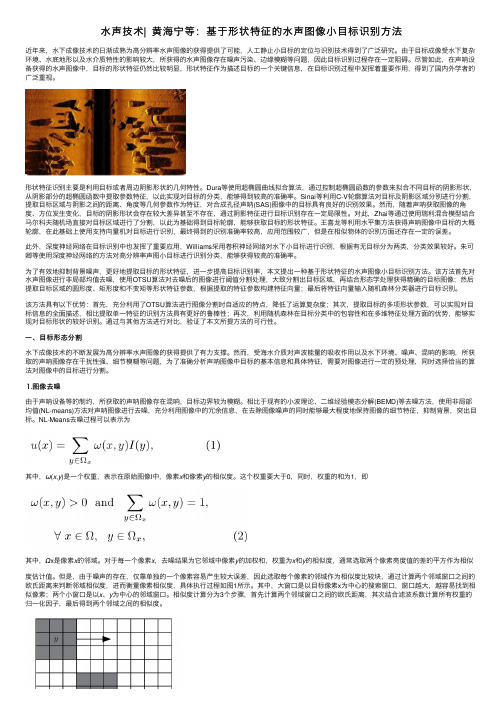
⽔声技术▏黄海宁等:基于形状特征的⽔声图像⼩⽬标识别⽅法近年来,⽔下成像技术的⽇渐成熟为⾼分辨率⽔声图像的获得提供了可能,⼈⼯静⽌⼩⽬标的定位与识别技术得到了⼴泛研究。
由于⽬标成像受⽔下复杂环境、⽔底地形以及⽔介质特性的影响较⼤,所获得的⽔声图像存在噪声污染、边缘模糊等问题,因此⽬标识别过程存在⼀定阻碍。
尽管如此,在声呐设备获得的⽔声图像中,⽬标的形状特征仍然⽐较明显,形状特征作为描述⽬标的⼀个关键信息,在⽬标识别过程中发挥着重要作⽤,得到了国内外学者的⼴泛重视。
形状特征识别主要是利⽤⽬标或者周边阴影形状的⼏何特性。
Dura等使⽤超椭圆曲线拟合算法,通过控制超椭圆函数的参数来拟合不同⽬标的阴影形状,从阴影部分的超椭圆函数中提取参数特征,以此实现对⽬标的分类,能够得到较⾼的准确率。
Sinai等利⽤C-V轮廓算法对⽬标及阴影区域分别进⾏分割,提取⽬标区域与阴影之间的距离、⾓度等⼏何参数作为特征,对合成孔径声呐(SAS)图像中的⽬标具有良好的识别效果。
然⽽,随着声呐获取图像的⾓度、⽅位发⽣变化,⽬标的阴影形状会存在较⼤差异甚⾄不存在,通过阴影特征进⾏⽬标识别存在⼀定局限性。
对此,Zhai等通过使⽤瑞利混合模型结合马尔科夫随机场直接对⽬标区域进⾏了分割,以此为基础得到⽬标轮廓,能够获取⽬标的形状特征。
王喜龙等利⽤⽔平集⽅法获得声呐图像中⽬标的⼤概轮廓,在此基础上使⽤⽀持向量机对⽬标进⾏识别,最终得到的识别准确率较⾼,应⽤范围较⼴,但是在相似物体的识别⽅⾯还存在⼀定的误差。
此外,深度神经⽹络在⽬标识别中也发挥了重要应⽤,Williams采⽤卷积神经⽹络对⽔下⼩⽬标进⾏识别,根据有⽆⽬标分为两类,分类效果较好。
朱可卿等使⽤深度神经⽹络的⽅法对⾼分辨率声图⼩⽬标进⾏识别分类,能够获得较⾼的准确率。
为了有效地抑制背景噪声,更好地提取⽬标的形状特征,进⼀步提⾼⽬标识别率,本⽂提出⼀种基于形状特征的⽔声图像⼩⽬标识别⽅法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NL-means(非局部均值)算法
对于某一离散噪声的图像
(){(),}v i v i i I =∈
中的某一像素k ,我们规定k N 为以k 为中心的矩形邻域,那么图像v 中的像素i 和像素j 的高斯加权欧式距离为
2
,2||)()(||αj i N v N v -
其中0a >为高斯核函数的标准差。
如果我们把含噪图像()v i 表示为待恢复的未受噪声污染时的图像()u i 与均值为0的加性高斯白噪声()n i 的和,则有()()()v i u i n i =+,且噪声服从均值为0,方差为2
σ的高斯分布。
于是欧氏距离可以表示成为以下等式
2
2
,22
,22||)()(||||)()(||σαα+-=-j i j i N v N v N u N u E
在该式中含噪声图像的高斯加权欧氏距离的平方与未受噪声污染图像的高斯加权欧氏距离的平方只差了一个常数2
2σ,从而保证了算法的稳健性,其稳健性取决于噪声的方差2
2σ。
于是我们可以得到描述像素i 和像素j 相似程度的权值为
2
2,2
||()()||1(,)exp()()
i j v N v N w i j Z i h
α
-=
-
其中,
∑Ω
--
=
j
j i h
N v N v i z )||)()(||exp(
)(2
2
,2
为权值的归一化系数,而h 为图像的平滑参数。
参数h 控制了指函数的衰减来控制权值的大小从而控制平滑噪声的程度,如果h 比较小的话,幂函数的衰减效果比较显著,细节保留程度比较高,因此会保持图像本身的细节信息。
由于像素i 和
像素j 相似程度依赖于矩形邻域()i v N 和()j v N 的相似程度,因此当权值越大时图
像的矩形邻域就越相似。
同时,权值(,)w i j 还满足以下条件:0(,)1w i j ≤≤且
(,)1w i j =∑。
下图(图1)为计算图像自身相似程度的例子,其中像素p 和像素1q 具有相似的矩形邻域,而像素p 和像素2q 的矩形邻域相似程度较低。
因此我们计算去噪权值时会发现,(,1)w p q 的值大于(,2)w p q 的值,即像素1q 对去噪权值的影响要远大于像素2q 。
图1
于是,对于该离散噪声的图像{()|}v v i i I =∈中的某一像素i ,我们可以得到这个图像所有像素的加权平均值为
()()(,)()j I
NL v i w i j v j ∈=
∑
在代码实现过程中,如果有一彩色图片
123(,,)
u u u u =需要在像素点p 处去噪,
我们首先取出以p 为中心,(21)(21)r r +⨯+大小的矩形窗口(,)B p r 。
那么对于窗口中的每一像素q ,我们可以得到两个分别以p 和q 为中心,大小为
(21)
(21)f f +⨯+
的矩形邻域
(,)B p f 和(,)B q f 。
这样我们就可以计算(,)B p f 和(,)B q f 之间的高斯加权欧氏距离
3
2
2
2
1
(0,)
1((,),(,))(()())3(21)
i i j B f d B p f B q f u p j u q j f ∈=
+-++∑∑
于是我们可以求出权值
2
2
2max(2,0.0)
(,)exp()d w p q h
σ-=-
和归一化系数
(,)
()(,).
q B p r C p w p q ∈=
∑
由此,该点的去噪结果为
(,)
1()()(,).
()
i
i q B p r u p u q w p q C p ∈=∑
如果我们要去噪的区域为以p 为中心,大小为(21)(21)f f +⨯+的矩形窗口
(,)B B p f =,那么我们定义其归一化系数为
(,)(,)
(,)
Q Q q f B p r C w B Q =∈=
∑
,
相应的去噪结果为
(,)(,)
1()(,).
i
i Q Q q f B p r B u Q w B Q C
=∈=∑
使用此方法,窗口B 中的每个点我们都得到了
2
2
(21)
N
f =+个近似的结果,这样
将所得结果取名均值,我们就得到了最终的去噪结果
2
(,)|(,)
1()().i i
Q Q q f q B p f u p Q p N
=∈=∑
在代码实现的过程中,在计算中涉及到的参数大小的选择都是由噪声信号的标准差σ决定的。
当σ增加时,我们需要选取更大的矩形邻域(更大的f )以确保窗口比较的稳健性。
同时,我们也要选择更大的窗口(更大的r )以便能找到更多的相似像素,从而确保该算法的去噪能力。
我们定义图像的平滑参数h k =σ,随着矩形邻域面积的增加,参数k 的值相应地减小。
一般情况下在算法中涉及到的参数的选择可以参考下表(图2)。
黑白
彩色
标准差σ 矩形邻域面积 选择窗口面积
平滑参数h
标准差σ
矩形邻域面积 选择窗口面积
平滑参数h
015σ≤≤
33⨯ 2121⨯ 0.40σ
025σ≤≤
33⨯ 2121⨯ 0.55σ
1530σ≤≤ 55⨯ 2121⨯ 0.40σ 2555
σ≤≤
55⨯ 3535⨯ 0.40σ 3045σ
≤≤
77⨯
3535⨯
0.35σ
55100σ≤≤
77
⨯
3535⨯
0.35σ
4575
σ≤≤ 99⨯ 3535⨯
0.35σ
75100σ≤≤
1111⨯
3535⨯ 0.30σ 图2
由于NL-means(非局域化平均值)算法不是用图像中单个像素的灰度值进行比较,而是对该像素周围的整个灰度的分布状况进行比较,根据灰度分布的相似性来贡献权值。
因此在利用非局部均值去噪的算法后,图像去噪的效果大大提高了,并且去噪过程对图片细节的影响比较小,在强纹理图像去噪中效果更加明显。
以下是几种参数下非局部滤波算法应用于sar 图像的去噪效果:
源图像
Sigma=10
Sigma=24
Reference
1. A. Buades, B. Coll, J.M. Morel "A review of image denoising methods, with a new
one"
Multiscale Modeling and Simulation, Vol. 4 (2), pp: 490-530, 2006. DOI:
10.1137/040616024
2. A. Buades, B. Coll, J.M. Morel "A non local algorithm for image denoising"
IEEE Computer Vision and Pattern Recognition 2005, Vol 2, pp: 60-65, 2005. DOI:
10.1109/CVPR.2005.38
3. A. Buades, B. Coll, J.M. Morel "Image data processing method by reducing image
noise, and camera integrating means for implementing said method", EP Patent 1,749,278 (Feb. 7), 2007.
4. Antoni Buades, Bartomeu Coll, Jean-Michel Morel"A non-local algorithm for image
denoising", 2010.
5. 《基于非局部均值的图像去噪》,贾晓萌,燕山大学,2005
6. 《基于非局部均值滤波的SAR图像去斑》,徐晶晶,西安电子科技大学,2010。