反射棱镜的精度
施工测量方案完整版

312国道苏州东段改扩建工程园区段YQ312-SG1标段测量方案编制:复核:审核:中铁二局集团有限公司312国道苏州东段改扩建工程园区段YQ312-SG1标项目经理部目录第1章工程概况 (3)第2章编制依据及执行规范 (3)第3章测量作业任务和测量管理组织机构 (4)3.1测量作业任务 (5)3.2测量组织机构 (5)3.3测量人员及设备配置 (5)3.4施工测量程序 (7)第4章控制测量 (7)4.1平面控制网加密方案 (7)4.2精密高程网加密方案 (8)4.3精度要求 (8)4.4施测方案 (11)4.5数据处理 (12)第5章施工测量5.1施工放样测量 (12)5.2临时设施放样 (13)5.3竣工测量 (13)第6章施工测量管理制度及技术保障措施 (14)6.1施工测量管理制度 (14)6.2测量成果管理制度 (16)6.3测量人员安全保证措施 (17)6.4测量技术保证措施 (17)6.5施工测量质量管理目标和基本质量指标 (18)6.6测量控制点保护措施 (18)1工程概况1.1项目总述G312国道(上海~伊宁)是东西向的国道主干线,也是苏州市重要的东西向对外及过境交通干线。
G312国道苏州段东起上海安亭镇,向西穿过昆山、苏州工业园区、平江区、金阊区、高新区、相城区,在相城区望亭镇西进入无锡境内,全场约81.9公里。
根据项目建设需要,312国道苏州段改扩建工程以工业园区星塘街为界分为东西两端,其中西段改扩建工程长约28公里已于2015年5月建成通车;312国道苏州东段改扩建工程为昆山童径路至园区星塘街,路线全长约33.2公里。
本次建设范围为阳澄湖大桥苏昆交界处至星华街共长约5.991公里,利用园区阳澄湖大道线位,涉及穿越京沪高速铁路、苏州市重要水源保护地阳澄湖、唯胜路附近全国重点文物保护单位草鞋山遗址、沪宁高速阳澄湖服务区等。
1.2本标段工程项目概况本标段路线利用阳澄湖大道线位跨越阳澄东湖后至唯胜路东,主线向下以隧道形式穿过唯胜路、夷亭路、华谊影城入口和沪宁高速阳澄湖出入口道路后起坡接地至木沉港河西侧。
全站仪棱镜参数
全站仪棱镜参数全站仪是一种在测量工程和土地测量中广泛使用的仪器。
它结合了传统的经纬仪、水平仪和测距仪的功能,通过测量目标的水平和垂直角度以及距离来确定目标的坐标位置。
而全站仪的测量准确性很大程度上依赖于其棱镜。
棱镜是全站仪测量中的关键组件之一,它负责接收和反射测量光束,使测量仪器能够准确读取目标点的坐标信息。
下面将介绍一些与全站仪棱镜相关的参数。
1.棱镜类型:全站仪棱镜可以根据其反射能力和外形类型进行分类。
常见的棱镜类型有标准棱镜、可变焦棱镜和角度自动识别棱镜等。
标准棱镜适用于一般场合,可变焦棱镜可以根据目标距离自动调整焦距以保证测量准确性,而角度自动识别棱镜具有自动识别角度功能,能够提高测量效率。
2.精确度:全站仪棱镜的精确度是评估其测量精度和稳定性的指标之一。
通常用观测常数作为棱镜精确度的衡量标准,观测常数越小,说明棱镜测量结果的稳定性越好。
在实际应用中,根据具体测量需求选择合适精确度的棱镜非常重要。
3.有效目标范围:棱镜的有效目标范围是指它能够接收和反射测量光束的有效距离范围。
有效目标范围的大小会影响全站仪的测量工作范围和测量精度。
通常情况下,有效目标范围大的棱镜可以实现更远距离的测量,但随着目标距离的增加,测量精度可能会下降。
4.反射率:棱镜的反射率是指其接收的光束中有多少比例的光被反射回全站仪。
具有较高反射率的棱镜可以提供更强的信号,从而改善测量精度和稳定性。
标准棱镜的反射率通常为60%至70%,而高精度棱镜的反射率可以达到以上。
5.偏心量和高度常数:棱镜的偏心量是指棱镜中心与实测点之间的距离,对于测量结果的精确性和准确性具有重要影响。
而高度常数则是指棱镜中心和仪器旋转轴之间的垂直距离。
准确测量棱镜的偏心量和高度常数非常重要,可以通过仪器的校正来获得较为准确的参数值。
综上所述,全站仪棱镜是全站仪测量中的重要组成部分,其参数直接影响着全站仪的测量精度和稳定性。
选择合适类型、精确度和相关参数的棱镜对于测量工作的准确性和效率具有重要意义。
feica 徕卡测量系统 说明书

测量&工程部©Leica Geosystems AG 版权所有 所有的说明及描述及技术数据,如有变动,恕不另行通知。
编号:NL20041208_CN徕卡测量系统 附件快讯 – No.1TCA 测量机器人棱镜徕卡测量系统为测量机器人——TCA 全站仪配备有轻巧的无源反射棱镜。
为了避免对棱镜是否朝向仪器的担心, 我们推荐使用360˚棱镜。
360˚棱镜由6片单棱镜组合而成。
这样的设计可以使来自任何方向的测量光束返回到发射的仪器处。
棱镜的六角形配置确保从任何方向观测,其棱镜改正常数及精度都一样。
徕卡测量系统有以下 360˚ 棱镜可供选用:1. GRZ4 360º 棱镜这款棱镜推荐给所有测量机器人全站仪使用,该棱镜一般安装在棱镜杆上,棱镜上下有橡胶垫保护,以免在棱镜倾倒时损坏。
发货时棱镜装在有填充物的箱内,以方便运输。
使用 GRZ4 棱镜的总体精度为5mm 。
当直接瞄准某一片棱镜时可以优于2mm 的精度。
在顶部的橡胶上有黄色箭头用于人工照准时使用。
2. GRZ121 360º 精密棱镜对于机械控制,精确的高程测定是非常关键的。
使用 GRZ121, 高程测量的精度可达2mm 。
使用带螺丝的夹具把棱镜固定在棱镜托上。
稳固的安置棱镜可以适应高低不平的机械控制应用工程。
3. GRZ101 360º 微型棱镜这款尺寸小、价格便宜的微型棱镜最高点位测量精度可达1.5mm 。
但在TPS 进行超级搜索及ATR 测量时作用范围受限,比标准棱镜作用范围要小。
GRZ101 同时配置四节棱镜杆、两个尖脚和一个水准器。
使用 GAD103 适配器可以把微型棱镜安装在任意Wild Stub 的棱镜杆上。
这个适配器提供了恰当的偏量改正,以便在棱镜杆上直接读取棱镜的高度。
其它品牌的360º 棱镜非法仿制徕卡测量系统专利产品 360˚ 棱镜设计的产品在市场上可以见到。
除了违反专利法,这些仿制的棱镜质量低劣。
高精度立方体分光棱镜 波长2000nm
高精度立方体分光棱镜是一种具有非常高精度的光学仪器,它在光学领域具有非常重要的应用价值。
本文将对高精度立方体分光棱镜在波长为2000nm时的特性和应用进行介绍。
一、高精度立方体分光棱镜的原理高精度立方体分光棱镜是一种利用光学分离技术进行光谱分析的仪器。
它利用不同波长的光在经过玻璃或晶体等材料时会产生不同的折射、反射和色散现象,从而达到对光波的分离和分析。
其主要原理是通过棱镜将不同波长的光分离出来,然后再进行收集、记录和分析。
二、波长为2000nm时的特性在波长为2000nm时,高精度立方体分光棱镜具有以下几点特性:1. 高分辨率:立方体分光棱镜对波长为2000nm的光具有非常高的分辨率,能够将近似波长的光线有效地分离开来,从而保证精确的光谱分析。
2. 高透过率:立方体分光棱镜对波长为2000nm的光具有高透过率,能够有效地收集和传输光线,保证光学信号的稳定和清晰。
3. 稳定性:立方体分光棱镜在波长为2000nm时具有良好的稳定性,能够保证长时间的连续使用而不会产生明显的漂移或偏差。
三、波长为2000nm时的应用1. 光谱分析:在波长为2000nm时,立方体分光棱镜可用于对样品中的光谱进行分析,从而获取样品的成分、结构和性质信息。
2. 光学通信:波长为2000nm的光具有较好的透过性和穿透性,可用于光学通信中的信号传输和调制。
3. 医学成像:波长为2000nm的光能够穿透人体组织,可用于医学成像领域的红外光学成像设备中。
四、高精度立方体分光棱镜的发展和趋势在今后的发展中,高精度立方体分光棱镜在波长为2000nm时将更加注重以下几个方面的发展:1. 提高分辨率:进一步提高分辨率,使其能够对更接近的波长进行有效的分离。
2. 加强稳定性:改善仪器的稳定性,使其能够在更恶劣的环境条件下工作。
3. 扩大应用范围:探索更多领域的应用,拓展立方体分光棱镜在波长为2000nm时的应用领域。
总结:高精度立方体分光棱镜在波长为2000nm时具有较高的分辨率、透过率和稳定性,可应用于光谱分析、光学通信和医学成像等领域,并且在未来的发展中将继续加强其技术特性和拓展应用范围。
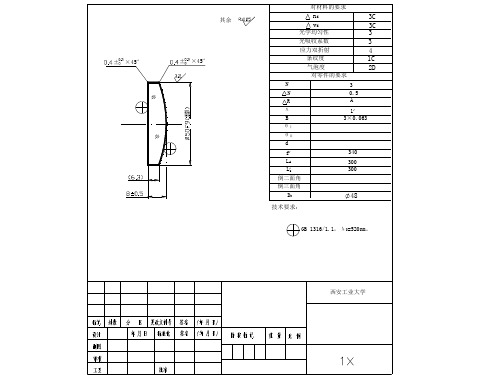
光学零件通用技术要求最新
平板零件的类型 不平行度
滤光镜 高精度 3″-1′
保护镜 一般精度 1′-10′
分划板
10′-15′
表面涂层的反射镜 10′-15′
背面涂层的反射镜 2″-30″
光楔精度 公差 高精度 ±(0.2″-10″) 中等精度 ±(10″-30″) 一般精度 ±(30″-1 ′)
十三、对光学部件的技术要求
方案之3:光圈检验
外表形状公差〔N 、ΔN〕
n 对光圈数N和局部光圈ΔN的要求
n 光波在被检光学外表与参考光学外 表间由于干预所形成的条纹。它表 示被检光学零件外表曲率半径误差。
R
4NR2
D2
n 被检光学零件外表与参考光学外表由干 预所形成的干预条纹的不规那么程度, 它表示面形精度。
n ΔN应由光学设计确定。
第二节 对光学零件的要求
n 透镜
曲率半径及面形精度 中心误差 外圆直径及公差 厚度及公差 外表粗糙度 外表疵病 气泡度
棱镜
角度及直线尺寸误差 屋脊棱镜误差 非圆形零件的保护性倒角 平面度 分辨率 研磨外表的粗糙度 抛光外表的疵病 气泡度
一、气泡度q
n 限定气泡大小,可以不限制也可以限制数量
n q=0.01 n q=0.01×3
n N和ΔN的取值应协调一致。一般ΔN= 〔0.2~0.1〕N
曲率半径及面形精度
三、标准样板精度等级△R
n 标准样板的精度ΔR分为A、B两级。
精
标准样板的曲率半径R
度 0.5~5 >5~10 >10~35 >35~350 >350~1000 >1000~4000
等
半径允差
级
ΔR(µm)
相对R名义尺寸的百分比
十五、光学零件图
浅谈反射介质对免棱镜全站仪测程和测距精度的影响

I n f l u e n c e o f Re f l e c t i v e Di e l e c t r i c o n t h e Me a s u r e me n t Ra n g e a n d Me a s u r eme n t Ac c u r a c y o f T o t a l - s t a t i o n I n s t r u me n t wi t h o u t Pr i s m
观测 边
A
B
坼=
=
镶=
观 测值平 均值( m )
1 7 5 . 8 9 8
= = 面 : m 砷
观 测值 中误 差 ( 1 1 1  ̄ 1 )
±2 . 4
引 言
无棱镜模式下各边观测值中误差,如表2 所示。
表2各边无棱镜模式观测值
观 测 边
有棱镜模式与无棱镜模式测距2 O 次。试验 方式为在
同一观测时段 、相 同观测条件 下,有棱镜 模式测量 完后 ,将棱镜头反转 ,再 用无棱镜模式测量棱镜的 背面 ,然后再对测量数据进 行统计,分析比较得出
结 果 ,测 量 统 计 结 果 如 表 1 所示。
表1无棱镜模式与有合作 目 标 的测距 比较
[ 关键词】 免棱镜全站仪 影响 精度
【 Ab s t r a c t J T h i s p a p e r i n t r o d u c e s t h e a d v a n t a g e s a n d p e r f o r m—
a l i c e o f t o t a l - s t a t i o n i n s t u me r n t wi t h o u t p r i s m, t h r o u g h t h e e x -
全站仪不用棱镜怎么测坐标

全站仪不使用棱镜时如何测量坐标引言全站仪是一种先进的测量仪器,广泛用于土木工程、建筑工程和测量工程等领域。
传统上,全站仪通常需要使用棱镜来进行坐标测量。
然而,在某些情况下,可能无法使用棱镜,这就需要寻找其他方法来测量坐标。
本文将介绍在全站仪不使用棱镜时,可以采用的几种替代方法。
方法一:反射棱镜测量全站仪不使用标准棱镜时,可以使用反射棱镜来进行近似测量。
反射棱镜是具有一定反射能力的平面镜,其表面反射光线可以被全站仪接收。
测量过程与使用标准棱镜类似,只需将反射棱镜放置在待测点上,并通过望远镜观察其反射光线。
需要注意的是,反射棱镜的反射能力可能会受到一些限制,因此其精度可能不如标准棱镜。
方法二:直接观测法另一种方式是通过直接观测待测点,并测量仪器与目标之间的距离。
首先,在全站仪上选择一个已知的基准点,然后用全站仪观测该基准点与待测点之间的水平角和垂直角。
接下来,测量全站仪到待测点的水平距离。
通过三角测量原理,可以计算出待测点相对于基准点的坐标值。
方法三:交会定位法交会定位法是一种基于几何关系的测量方法。
它需要使用至少两个已知坐标的点来确定待测点的坐标。
首先,在全站仪上选择两个已知坐标点,并测量它们相对于全站仪的角度和距离。
然后,通过观测待测点与已知点之间的夹角和距离,应用三角测量原理来计算待测点的坐标。
方法四:单点测量法单点测量法是一种相对简单的测量方法,在需要快速获得坐标估计值时可以使用。
该方法只需要选取一个已知坐标点,然后通过观测全站仪与待测点之间的角度和距离,应用三角测量原理计算出待测点的坐标。
需要注意的是,由于缺乏其他参考点的信息,单点测量法可能会导致较大的误差。
结论在某些情况下,全站仪可能无法使用标准棱镜进行坐标测量。
但是,通过采用反射棱镜测量、直接观测法、交会定位法或单点测量法,我们仍然可以获得待测点的坐标。
根据实际需求和具体情况,选择适合的方法可以有效解决全站仪不使用棱镜时的坐标测量问题。
全反射棱镜原理
全反射棱镜原理
全反射棱镜原理是光电学计量中一种常用的原理。
它以全反射现象及棱镜的理
论为基础,把一束光在交叉棱镜中全反射出来,以解决复杂的线性度矫正问题。
目前,它在坐标测量机、缝纫机、检测仪器等机械设备中都有着广泛的应用。
全反射棱镜具有精确、可靠、灵活等特点,能够在不同尺寸操作范围内实现非
常准确的线性度测量与解调。
它的工作原理是,将一组不同折射率的棱镜组成的光学系统,将外界的光束反射到棱镜中,使其在折射率较大的棱镜边界处完全反射出来,而在折射率较小的棱镜边界处则只有折射部分发射出来,进而实现精准校正的功能。
随着电子技术的发展,全反射棱镜也发生了巨大的变化。
现在,它越来越多的
应用在高性能的光缆、光纤定位器、传感器等设备中,可以高精度地监测传感器信号的变化,以及坐标测量机及缝纫机的线性矫正等等。
由于它的精确度和可靠性,实现了自动调平、面膜定位精度、自动划线以及曲线绘画等多方面应用。
此外,全反射棱镜还能够实现测距、定位、判断等功能,可以用于高精度测量,以实现无损检测,可以与表面定位和轨迹技术相结合,智能机器人等任务。
而且,随着现代计算机技术的发展,它也可以直接与计算机接口,使它的控制更加精确,使工作效率提高得更加明显。
总而言之,全反射棱镜是一种功能强大的光学传感器,通过利用全反射现象和
棱镜原理,能够实现准确的线性矫正,且可以用于测量、定位、判断和控制复杂的任务,取得了非常显著的应用效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
反射棱镜的精度
从玻璃立方体的顶角中切割出一个锥形体,可以制造圆形三棱镜。
该锥形体有3个相互垂直的反射面,能够将来自任何方向的入射光线平行地反射回去。
反射棱镜的精度取决于多个方面,本快讯较详细地介绍了这些方面的细节内容。
光束角偏差
入射光束和反射光束不平行形成的角差称为光束角偏差。
大的光束角偏差将极大降低测距返回信号的强度,并因此降低距离测程。
GPR1/GPR121专业型反射棱镜具有极高的加工精度:光束角偏差小于2弧秒。
加工后,每个棱镜都通过inferometer (检测光束角偏差的仪器)检测,以确定其光束角偏差。
那些角偏差较大,但仍然小于8弧秒的,将被用于装配GPR111基本型反射棱镜。
棱镜增反镀层
徕卡棱镜在三个直角反射面上有一层镀铜增反层。
铜对红外光束具有非常高的反射能力。
由于镀层具备耐用性和抗腐蚀性,所以具有很长的使用寿命。
市场上许多其他厂家的棱镜在反射面上没有镀层。
值得注意的是,这对距离测程、ATR 测程和PowerSearch 测程的影响将降低30%以上。
此外,当湿气在反射面凝结成露珠时,将会产生不正确的观测值。
对徕卡来讲,有一个例外是GPR112监测棱镜。
该棱镜没有反射镀层,但专利气体充气技术能够有效地阻止露珠的形成。
棱镜消反涂层
徕卡棱镜的前表面有一消除反射的涂层。
该涂层极其坚固,还具有保护棱镜表面防止刮擦的特性。
若没有该涂层,则棱镜的前表面将会反射部分的EDM 测距信号。
在较近的距离上,这将会产生不正确的距离观测结果。
上述棱镜消反涂层是针对徕卡EDM 测距信号优化设计的。
带有类似涂层的其他品牌的棱镜仍将可能存在部分前表面反射,对距离观测产生不正确的影响。
GPH1P 精密棱镜是一个例外。
虽然它没有消除反射的前表面涂层,但由于棱镜按一个微小的斜度进行装配,从而可以防止棱镜的前表面直接反射信号返回到EDM 接收器中。
对中精度
对中精度是指棱镜的光学中心与棱镜框架的机械对中轴之间的符合精度。
根据棱镜在三角基座上的强制对中支架,可以确定某点测量的3维对中精度。
徕卡棱镜一览表
下表给出了徕卡反射棱镜简要规格说明一览。
由此可根据距离测程和精度要求选择相应的反射棱镜。
表中对中精度基于SNLL121专业棱镜支架(带有激光对中器)。
棱镜类型光束角偏差(弧秒)
对中精度(毫米)
专业型GPH1P
20.3GPR1/GPR1212 1.0GMP1016 1.0GRZ46 2.0GMP1046n/a 基本型GPR1118 2.0GPR1116 2.0GRZ1016 2.0GPR112
6
n/a
附件快讯——第5期
反射棱镜的精度。