HYPCK 多波束安装校准资料
基于C#的多波束测深数据预处理软件设计与实现

基于C#的多波束测深数据预处理软件设计与实现卢凯乐;王胜平【摘要】Based on the study of the multi beam sounding data preprocessing,which include data de-coding,sound ray tracking,attitude correction,geographic homing and outliers batch elimination. We design and develop a multi beam sounding data preprocessing software by using C#. The software also has the function of parameter configuration,data editing,precision system auxiliary parameter detec-ting,and view setting. Compared with the results of Hypack software,the software has high accuracy and reliability.%在研究了多波束测深数据预处理中的数据解码、声线跟踪、姿态改正、地理归位和粗差批处理的基础上,基于C#编程语言,设计并开发了一款多波束测深数据预处理软件,该软件同时还具备参数配置、测深数据编辑、精密系统辅助参数探测、视图设置等功能。
同Hypack软件处理结果比较结果表明,本软件具有较高的精度和可靠性。
【期刊名称】《江西科学》【年(卷),期】2016(000)001【总页数】4页(P56-59)【关键词】多波束测深数据;数据解码;C#语言;软件设计【作者】卢凯乐;王胜平【作者单位】东华理工大学测绘工程学院,330013,南昌; 流域生态与地理环境监测国家测绘地理信息局重点实验室,330013,南昌;东华理工大学测绘工程学院,330013,南昌; 流域生态与地理环境监测国家测绘地理信息局重点实验室,330013,南昌【正文语种】中文【中图分类】P229多波束测深系统起源于20世纪60年代美国海军研究署资助的军事研究项目,发展至今,已成为当代海洋基础勘测技术中的一项高新技术,多波束测深具有高精度、高效率和高分辨率等优点[1-2]。
Hypack多波束数据内业处理说明书

Hypack多波束数据内业处理说明书多波束内业处理用户手册V1.32016年12月目录1.处理流程 (1)2.数据处理 (2)2.1.数据准备 (2)2.1.1.多波束数据准备 (2)2.1.2.潮位数据编辑 (3)2.1.3.声速剖面数据编辑 (4)2.2.数据处理 (5)2.2.1.新建项目 (5)2.2.2.数据编辑 (6)2.3.水深成果输出 (11)2.4.安装偏差校准 (12)3.数据抽稀处理 (15)3.1.网格排序 (15)3.1.1.准备数据 (15)3.1.2.抽稀处理 (15)3.2.水深点压缩 (18)3.2.1.准备数据 (18)3.2.2.抽稀处理 (18)4.3D建模 (20)4.1.TIN模型 (20)4.1.1.准备数据 (20)4.1.2.建模 (20)附录 (22)附录A背景TIF文件生成 (22)A.1Cloud点云工具生成tif (22)A.2TIN模型工具生成tif (24)附录B xyz数据文件合并 (26)1.处理流程Hypack多波束数据处理是一个简单而繁琐的过程,从初始数据到最终的产品,我们所需要经历的流程大致如图1.1所示。
图1.1多波束处理流程图2.数据处理2.1.数据准备2.1.1.多波束数据准备多波束外业采集程序较多,不同程序会将外业数据保存为不同的数据格式,采用hypack软件进行多波束数据处理前,需将外业采集的数据转换为hypack 的HSX格式数据。
至于转换工具,请联系外业软件的供应商提供,其中hypack 也自带数据转换的小程序hsxconverter,支持将一些常见的数据格式转换为HSX 格式。
如图2.1所示为hypack2016转换小程序的软件界面。
图2.1hsxconverter转换程序窗口其中,程序支持多种常见的数据格式,如图 2.2所示为hypack2016里所支持的数据类型。
图2.2hypack支持的数据格式对话框这里,就不详细介绍此转换过程了。
多波束原理安装及操作
生物的 – 海洋生物;一般 <10kHz
普通波动原理 为什么多波束
不正确的水深测量
第一回波量程
不规则海底
深度量程
普通波动原理单波束
测深仪的局限性
窄波束
该窄波束叫做未经稳定的波
束
来自有限面积的回波
普通波动原理单波束
测深仪的局限性
纵摇角度
未经稳定的波束受船舶
运动影响
实际照射的区域
希望照射的区域
d1
S1
d2
d
S2
Sound sources
Line of equidistant locations
普通波动原理
相长干涉位置 2
A
S1
S2
d
A = d x sin
相长干涉 : A/ = 0; 1; 2; 3
or d/ x sin = 0; 1; 2; 3; 4;
相消干涉 : d/ x sin = 0 5; 1 5; 2 5; 3 5;
SeaBat 8111
240kHz
SeaBat 8101
<1dB/km
2 dB/km
5dB/km
30dB/km
20dB/km
70dB/km
455kHz
SeaBat 8125
70dB/km
110dB/km
散射
水中的声波遇到下列物体后发生散射:
水面 水底和陆地
有机颗粒
海洋生物
气泡
温度变化
加强背板
波束形成 – 换能器阵
导电涂层
连接导线
波束形成 – 水听器阵
阵基元
1
2
多波束水深测量误差分析及校正
多波束水深测量误差分析及校正作者:杨海峰黄承孝来源:《科技资讯》2017年第15期摘要:多波束水深测量技术效率高,可靠稳定,覆盖面积广。
但多波束测深系统的声学原理以及海水具有不均匀性,声波在进行传播期间会出现线折射,而波束测点也会因此出现位置的计算不准确。
因此,该文通过分析主要的系统参数误差,进一步深究并提出对应的测定方法和完善措施。
关键词:多波束水深测量误差校正中图分类号:P283 文献标识码:A 文章编号:1672-3791(2017)05(c)-0095-02该文从需要测定的系统参数中选取部分进行误差分析,主要包括横摇偏角(Roll bias)、纵倾偏角(Pitch bias)、时间延迟(Time Offset),除此之外,还需进行声速剖面(SVP)校正。
1 声速剖面误差及校正海水本身具有不均匀的性质,因此声波在传播的过程中,会受到海水盐分密度、水压以及水温等多方面影响,继而产生对应性的改变。
如声速会因海水的盐分密度、水压、水温的上升而加速,这里最密切相关的还是水温,其次是水压,再是海水盐分密度。
为了能够更好地保障多波束测深的精准性、可靠性,通常采取较多的声速剖面,进行科学合理的时间安排以及空间上的布置,有目的地适当对声速剖面的空间分布密度进行调整。
如在靠岸水较浅范围内,就需要考虑盐度情况,这个时候可适当调整或者加大声速剖面在空间上的分布密度,考虑到海域的昼夜温差较大,应加大声速剖面在时间上的分布密度。
2 导航定位时间延迟误差及校正2.1 误差分析通常定位系统都是和测深系统同步进行的,否则就会令测深点发生偏移,进而影响所测得的海底地形正常图形,这个过程叫做定位时间延迟误差。
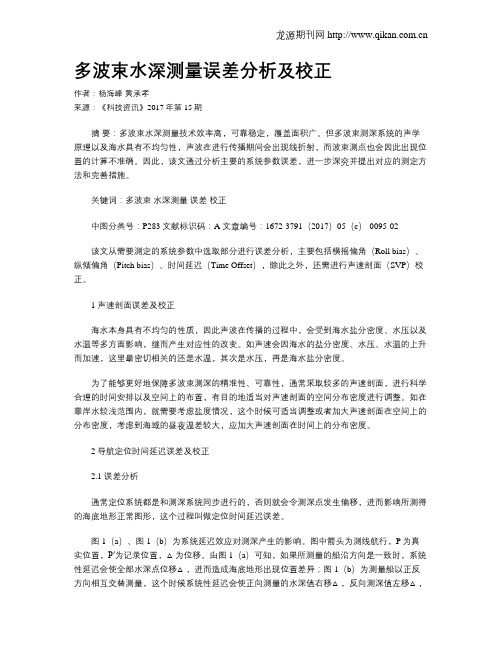
图1(a)、图1(b)为系统延迟效应对测深产生的影响。
图中箭头为测线航行,P为真实位置,P′为记录位置,△为位移。
由图1(a)可知,如果所测量的船沿方向是一致时,系统性延迟会使全部水深点位移△,进而造成海底地形出现位置差异;图1(b)为测量船以正反方向相互交替测量,这个时候系统性延迟会使正向测量的水深值右移△,反向测深值左移△,这个时候海底地形呈现条带状交叉错位。
多波束测深系统声速校正
多波束测深系统声速校正3何高文(广州海洋地质调查局二海,510760)摘要海水声速是多波束测深系统进行水深测量的基本参数之一,声速剖面正确与否直接影响测量结果的精度和可靠性。
本文阐述了声速对多波束水深测量的影响机理,并通过对南海SA 12试验区采集的声速资料的分析,以SeaBeam 2100多波束测深系统为例,对声速校正的技术方法进行了探讨。
关键词 海洋 声速校正 多波束测深 SeaBeam 2100测深系统中图分类号:P 73312 文献标识码:B前言自1994年原地矿部引进第一套多波束测深仪(SeaB eam 2100系统,安装于“海洋四号”船)以来,我国先后引进了多套深、浅水多波束测深系统,在大洋矿产资源调查和目前正在开展的近海大陆架及专属经济区的地形勘测中,发挥了巨大作用,引发了一场海底地形测量的革命,为有效地维护国家权益和即将开展的海域划界作出了很大贡献。
如何保证测量数据的精度及其可靠性,是任何测量仪器必须关注的问题,多波束测深仪也不例外。
作为一种有别于传统单波束测深仪的水深测量仪器,影响多波束测深数据的因素有很多,其中海水声速(简称“声速”)是重要的因素之一。
下面以SeaB eam 2100系统为例,探讨声速对多波束测量数据的影响以及声速校正的技术方法。
由于SeaB eam 多波束测深系统的水深测量值是根据发射声波的往返时间与声波在海水中的传播速度来确定的,因此,及时为系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一;此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的数据取点,也将对测量结果产生影响。
与传统的单波束测深仪相比,多波束测深仪对声速的要求更为严格(见后述)。
所以,为了获得准确可靠的多波束测深数据,必须进行声速校正。
通过对南海SA 12试验区海水声速系统测量结果的研究,获得了声速变化规律的认识,从而为SeaB eam 系统的声速校正提供科学依据。
1 声速影响因素海洋中的声速是一个比较活跃的海洋学变量,它取决于介质中的许多声传播特性,随季收稿日期:2000204220第19卷 第4期2000年12月 海 洋 技 术O CEAN T ECHNOLO GY V o l 119,N o 14D ec,2000节、时间、地理位置、水深、海流等的变化而不同。
多波束声呐基阵一体化自校准方法

多波束声呐基阵一体化自校准方法魏波;周天;李超;邢天耀;李海森【摘要】为了保证多波束测深系统的探测精度,在系统组装前需要对多阵元接收换能器基阵进行指向性测量和目标方位波束响应校准.针对常规方法中图像散焦问题存在的不足,本文提出了一种多波束声呐基阵一体化自校准方法,将换能器基阵和信号调理采集电路一体化测量,利用目标方位波束响应输出测量换能器基阵波束指向性.推导了阵元间距误差对测深结果产生的影响,采用聚焦波束形成技术,在小尺寸水池条件下开展校准实验研究.通过在水池中预先获得的方位波束角误差曲线,对多波束测深声呐外场实验数据进行了归位补偿,实现了多波束声呐基阵一体化自校准.实验结果表明:该方法能够保障多波束声呐的有效覆盖范围,具有较强的实用性和重要的工程应用价值与推广价值.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2019(040)004【总页数】7页(P792-798)【关键词】换能器基阵校准;聚焦波束形成;多波束测深声呐;图像散焦【作者】魏波;周天;李超;邢天耀;李海森【作者单位】哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001;哈尔滨工程大学,海洋信息获取与安全工信部重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001;哈尔滨工程大学,海洋信息获取与安全工信部重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001;哈尔滨工程大学,海洋信息获取与安全工信部重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001;哈尔滨工程大学,海洋信息获取与安全工信部重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001;哈尔滨工程大学,海洋信息获取与安全工信部重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TP391近年来随着现代水声信号处理技术和水声换能器技术的大幅度进步,水下目标精细探测和成像声呐技术已然成为了国内外研究的热点[1]。
多波束声呐声学参数校准系统设计
多波束声呐声学参数校准系统设计韩鸿胜;柳义成;窦春晖;陈允约【摘要】依据水声计量测试原理与方法,设计了一套多波束声呐声学关键参数的计量校准系统.利用多维运行控制装置,在消声水池中对多波束声呐进行了声源级、工作频率、波束宽度、脉冲宽度等声学指标的校准.阐述了校准系统的主要组成、计量器具控制和校准方法.实现了在等效自由场、远场中对水下声呐换能器位置的精确控制、声信号采集与分析等功能.通过不确定度评定,给出了该校准系统工作频率、波束宽度测量结果的扩展不确定度.通过参考值与标称值比对,求得被检多波束声呐声源级误差小于0.7 dB,工作频率误差小于0.03%,脉宽误差小于2%,波束宽度误差小于10%.【期刊名称】《水道港口》【年(卷),期】2019(040)004【总页数】7页(P464-470)【关键词】多波束声呐;声学参数;计量校准;不确定度评定【作者】韩鸿胜;柳义成;窦春晖;陈允约【作者单位】交通运输部天津水运工程科学研究所国家水运工程检测设备计量站,天津300456;交通运输部天津水运工程科学研究所国家水运工程检测设备计量站,天津300456;交通运输部天津水运工程科学研究所国家水运工程检测设备计量站,天津300456;交通运输部天津水运工程科学研究所国家水运工程检测设备计量站,天津300456【正文语种】中文【中图分类】U666.7多波束声呐凭借全覆盖高效作业的优势,成为水深精细探测的主要声呐设备。
声呐设备性能的提高、频率范围的扩展和类型的增多对水声计量提出了许多新的要求,为保证海洋测量数据准确度,定期计量其探测性能具有实际的研究与应用价值[1-3]。
声源级、工作频率、波束宽度和脉冲宽度属于多波束声呐基本的声学参数,与其反向散射强度、距离分辨力、声照范围以及测深准确度等性能紧密相关,以上参数应作为多波束声呐水声计量校准的主要指标。
1 校准系统设计水声计量测试既要用到机械装置和电测量装置,又要涉及到水介质中声场,其量值不确定度要远大于单纯的几何、电磁、光学测量。
多波束测深边缘波束误差的综合校正(精)
第27卷第4期2005年7月海洋学报ACTAOCEANOLOGICASINICAVol.27,No.4July2005多波束测深边缘波束误差的综合校正吴自银1,2,金翔龙1,2,郑玉龙2,李家彪2,余平3(1.浙江大学地球科学系,浙江杭州310028;2.国家海洋局海底科学重点实验室,浙江杭州310012;3.广州海洋地质调查局,广东广州510760)摘要:边缘波束误差是影响多波束测深数据精度的主要因素,,也是进行相关研究的基础.、,测线方向的条带状假地形或地形位置偏移.过程,,面向对象方法,全面分析造成多波束勘测大,、提高数据精度的综合处理方法,最终.该项研究成果已初步应用于海洋项目总图编绘工作,并取得了预期效果.关键词:多波束;边缘波束处理;噪声编辑;误差校正中图分类号:P283;P209文献标识码:A文章编号:025324193(2005)04200882071引言多波束测深系统是当代海洋基础勘测中的一项高新技术产品.它采取多组阵和广角发射接收,并形成条幅式高密度测深数据,是计算机技术、导航定位技术和数字化传感器技术等多种高新技术的高度集成,是一种全新的高精度全覆盖式测深系统[1~3].从20世纪90年代我国首次引进SeaBeam多波束勘测深水系统在大洋调查和边缘海深水区勘测中起到重要作用,EM950和ElacBottomChart1180/1050中浅水多波束勘测系统被应用于海洋环境调查项目,SeaBat浅水系统在光缆路由调查中起到重要作用.近年来开展了数个基础勘测项目,获取了相关海域的多波束测深资料,但在上述多波束勘测数据的后处理成图过程中也发现了一些问题(见图1).图1a位于陆架浅水区域,从该图看出等深线极不光滑,左部等深线呈南北向抖动,右下部等深线呈西南—北东向抖动,反映了沿航迹方向的假地形.图1b是用在深水区采集的多波束数据绘制的等值线系统以来,多波束勘测系统的引进呈蓬勃增加之势,其中比较典型的多波束测深系统有美国SBI公司的SeaBeam深水多波束测深系统、挪威Simard公司的EM多波束测深系列、德国AlliedSignalELACNautik公司的ElacBottomChart1180/1050多波图,跟踪该图中单一等深线不难发现等深线极不光滑,甚至相邻等深线在局部抖动区呈平行状,在该图的左上部有一假海沟状地形,西南-北东向等深线在该处被截止,通过实测航迹分析,上述地形均为沿束测深系统、STNATLASELEKTRONIK公司的ATLASFansweep多波束测深系统及美国RESON公司的SeaBat多波束测深系统等[2],其中SeaBeam收稿日期:2004201204;修订日期:2004207208.基金项目:大洋技术项目资助(DY105203201207)“;863”青年基金资助项目(2002AA616010);海洋局基金资助项目(2002316).),男,河南省光山县人,副研究员,从事海洋地质及信息技术研究.E2mail:ziyinwu@作者简介:吴自银(1972—4期吴自银等:多波束测深边缘波束误差的综合校正89航迹方向的假地形.图1c位于深海平原区,该图等深线均呈锯齿状,甚至相互平行,实测的航迹为南北向,通过三维图分析,基于该数据反映的海底形态为南北向延伸、相互平行类砂脊状地形,是典型的假地形.图1所显现的精度问题具有一定的代表性,这种精度问题必须得到彻底解决才能制作符合规范要求的海底地形图件.本文研究工作的目的在于对“九五”期间已勘探的相关多波束数据进行全面分析,探寻出现精度问题的原因并提出相应的解决办法,然后用获得的经验和方法再去指导后续的多波束勘测和相关研究工作.211海洋噪声导致的测量误差噪声(即假信号或坏波束)产生的原因是多方面的,对不同测深系统而言,测量噪声产生的原因主要有以下几个方面[2,8]:(1)海况条件不好;(2)人为操作失误或声呐参数设置不合理;(3)仪器、环境等其他原因.对测深资料进行编辑,主要是剔除因海况因素产生的噪声.测深系统对海况的依赖性很大,当海况恶劣到一定程度时采集的资料便包含很大的噪声成分,甚至导致测深系统不能正常工作.操作人员不熟练或声呐参数设置不合理会造成一些人为噪声,有时会导致仪器不能找到海底,使大量有效波束丢失,严重时甚至导致系统瘫痪.除了上述因素会在,,、、鱼群、海底底质和地形对,都会不同程度地产生噪声,从而对测深系统的正常测量工作带来一定的干扰和影响.212声呐参数偏差导致的测量误差探头和运动传感器的安装一般不能达到理想状态,尽管严格按照规范要求进行了横摇(roll)、纵摇(pitch)、电罗经偏差和导航迟延的校正,但如果校正海区与勘测海区水深、声场差异太大,也会出现因声呐参数偏差导致的勘测误差.其次,由于海洋勘测的长期性和特殊性,如果不定期重新校正上述参数,也可能导致测量误差,而这种误差无法通过编辑方法予以剔除(图1c).实际工作表明上述声呐参数中横摇角度偏差对测量精度的影响占主导地位,该误差值的大小直接图1测深误差数据实例2多波束测深误差源分析在多波束系统测量过程中由于仪器自噪声、海况因素、声呐参数设置不合理或者使用了较大误差的声速剖面,致使测量资料不可避免地存在假信号(噪声),造成虚假地形,从而使绘制的海底地形图与真实海底存在差异(图1)[1~3].为了提高海底地形图的精度,必须消除这些假地形信号,为此首先对实时采集的测深资料进行编辑或校正,剔除假信号,恢复、保留真实信息,为后处理成图作好必要的准备.影响勘测的效率和相邻测幅的有效拼接.横摇角度偏差导致系统无法正确归位中央波束,中央波束与垂直方向有一定夹角,中央波束在垂直入射情况下传播距离、走时都最短,倾斜入射必然延长走时,系统在运算时却误认为中央波束是垂直入射的,在计算其他波束时也是按照与中央波束间的夹角关系依次计算走时和传播距离,最终导致勘测的海底面与实际海底面间有一定的夹角.在实际勘测时往往表现为一边波束上翘、另一边波束下凹,与正常地形不同的是这种现象随航向而改变,在平坦海区表现得尤为明显,在后处理成图中往往出现沿航迹方向的条带状假地形.在某深水航次中获取了典型的范例数据(见图1c).针对声呐参数误差后处理主要是校90海洋学报27卷正横摇角度偏差.213误差声速剖面导致的测量误差为了定量讨论误差声速剖面对多波束勘测的影响,我们基于斯涅尔定律编写了相应的声波传播程序,并用该程序对同一地点、不同时间采集的两条声速剖面进行比对试验(图2).980721和980802是在东海某区相近位置用同一CTD声速仪分别于1998年7和8月采集的两条声速剖面,980721声速剖面于70m左右具有明显跃层结构,980802声速剖面呈现负梯度结构.假定海底水深是120m(便于阐述问题),波束间距是2°,最大发射开角是150°,用980721剖面采集的资料,然后用980802剖面改正,会产生严重误差(表1),当波束入射角大于60°时水深误差已大于国际航道组织(IHO,InternationalHydrographicOrganization)[16]的1%精度要求,而当波束入射角等于74°时水深误差已达到4180%,在该情况下由不准确声速剖面带入的误差已远大于其他因素造成的误差,使测量的海底地形发生畸变.影响声速改正的因素主要有三个[2,13~21]:表层表1不准确的声速剖面引起的测量误差)入射角/(°60100115323515203121181901856210011622491721917118161111641001173266112381311813114366100118528418259131171811826810011993061728314117122131701001216332133111211615219472100123636218343191151531747410012593991338216114124180走时/s传播距离/m中心距/m水深/m水深误差(%)声速变化、声速剖面跃层及其深度和换能器垂直升降运动.表层声速的变化是整个声速剖面变化中最活跃的部分.由于受到昼夜温差和季节性变化的影响,表层声速常持续发生变化,一般昼夜变化为1m/s,季节性变化可达19m/s.由于表层声速的变化最早改变波束射线路径,因此表层声速变化对波束测量精度的影响也就最大,尤其边缘波束更是如此.试验表明表层声速减小时将引起勘测海底两头上翘,而表层声速增加时将引起勘测海底两头下凹.表层声速变化越大,引起的海底畸变也越大,并且这种畸变从中央波束到边缘波束呈迅速增加的趋势.根据斯涅尔折射定律,声波在传播过程中遇声速界面(跃层)将发生折射,使各波束声线的传播路径和前进方向发生改变.跃层的强度和深度影响多波束的测量精度,跃层强度越大,声波射线偏转角度越大,则波束测点的空间位置变化越大;跃层越浅,波束偏转越早,如果是递增跃层,边缘波束测点距中央波束测点的距离越远,反之两者距离越近;跃层较深,则跃层对波束偏转影响较小.对于多波束系统而言,如果跃层较浅,换能器正好处于跃层之中,在勘测过程中由于波浪作用导致船体摇晃,换能器探头随船体运动,探头将有可能起伏于跃层之中,探头在跃层上下测量的结果是不同的,在码头或浅水区域勘测,必须考虑这种因素导致的勘测误差.4期吴自银等:多波束测深边缘波束误差的综合校正913综合处理方法及流程海洋噪声、声呐参数偏差和声速剖面误差等因素对多波束勘测数据的影响是一个复杂、综合、叠加作用的过程,因此针对不同的误差源,首先应采取相应的校正措施分别按步骤处理,最终以综合可视化的校正方法提高采集数据的质量.311噪声剔除方法[2,8]夹角(在实测监视屏上常表现为波束脚印[2]连线呈倾斜翘起状态),测量海底与真实海底以中央波束为轴呈斜交状,严重时导致在平坦海区勘测的海底地形出现沿航迹方向的条带状假地形,在进行声速校正或后处理成图前必须校正这种误差.在勘测前严格按照规范进行参数校正,勘测过程中也严格按照要求进行,理论上测量结果应该满足精度要求,但由于多波束勘测的长期性和特殊性,受外界影响甚大,如恶劣海况导致运动传感器不能及时补偿船姿、航次勘测末期船载油水的大量减少导致船姿的改变、在敏感海区勘测不能定期校正声呐参数等,多年的实测工作表明在长期勘测中常有(),而重新测量将投前对横摇偏差角的校正方法一般[2,13~21]:选择平坦海区(水深一般在20~100m)布设三条往返测线(测线长度一般是水深的20倍),勘测船以5kn左右速度全开角发射、往返径直穿过每条测线,然后编辑每条测线并进行潮位、吃水改正,最后以每条往返测线为一组进行数学统计运算,求取左、右舷横摇偏差角度(见图3).其他声呐参数一般选择典型海底目标物(如沉船、管线、锚沟等),布设一条往返测线,根据具体要求设置不同的发射开角和速度穿过目标物,用目标识别、对比方法校正相应的声呐参数,但如果发现勘测后的数据有声呐参数偏差问题,如何在已勘测的数据基础上消除声呐参数造成的误差国内还未见相关研究(国家海洋信息中心文献馆查新结论1)),国外也未见相应的商用软件.我们采取的策略是(见图4):选择一块已勘测的较平坦海区,将波束点(脚印[2])沿航迹方向叠加投影,假定海底是一微倾斜平面,则投影结果必然是以中央波束为中轴的近似正弦波状图形(见图1c),计算出每个扇区与其相邻测线相应扇区中央波测深数据的编辑方法有多种,不同测深系统的编辑方法亦不尽相同,但总的编辑思路是一致的,编辑的对象一般是水深值,有的软件也可以对水深点的坐标进行编辑,用于消除导航定位造成的位置误差.我们在总结使用多套测深系统经验的基础上,将测深数据编辑方法归纳分为两种:计算机自动识别法和人机交互识别编辑法,计算方法分别为曲面拟合法和投影法.(1)曲面拟合法.,.用中央波束点集建立噪声误差模型,用一定的曲面拟合海底面,超出曲面一定范围的数据点称之为跃点,采取人机交互的方式予以剔除.对曲面拟合常用的计算方法有Bezier方法、B样条方法、最小二乘法拟合等.(2)投影法.因为采集的水深数据是三维的,对测线文件进行编辑时首先必须把水深数据投影到三视图平面上,然后才能进行编辑.投影方式主要有以下几种:1)沿测线前进方向投影;2)正交测线方向投影;3)垂直正投影.如果同时对多条测线文件进行编辑,可以采取垂直正投影.为了进一步提高编辑效果,在垂直正投影的基础上还可以用“水深分层法”和“相邻波束及相邻测线对比编辑法”进行编辑.采用上述方法编辑多波束测深数据的过程中,还要自始至终贯穿“参考地形变化趋势编辑”的原则.312声呐参数后处理校正方法束连线与水平线的夹角,然后求出这些夹角的均方根,该值即为试验海区的海底自然坡角近似值.假如试验海底是一微倾斜平面,即使声呐参数存在误差,每个多波束勘测条幅也是与海底面相交的一个倾斜平面,可以求出每条勘测条幅每个扇区[2](fan)的倾斜角度,然后求出每条勘测条幅上所有扇区倾角的均方根,再求出试验区相同航向勘测条幅均方根的非海洋噪声因素导致的测量误差不能通过编辑方法彻底剔除,须分析造成误差的原因,通过相应方法予以校正.声呐参数偏差导致的测量误差往往与海洋噪声导致的误差有明显的不同,其中以横摇角度偏差导致的测量误差最明显.因横摇偏差角的存在导致实测地形沿航迹方向与真实海底存在一定的1)查新报告:多波束边缘波束的可视化综合处理技术研究(NMDIS20022002).92海洋学报27卷平均值,两相向航向均方根的平均值减去先前求取的海底倾斜角度,最后求平均,该平均值理论上就是横摇偏差误差角度.声速剖面造成的测量误差:(1)重新拟合最佳声速剖面;(2)直接校正偏差数据. (1)重新拟合最佳声速剖面.由于测深系统勘测的时效性,一般多波束系统只能用有限个声速点去近似拟合实际声场(如SeaBeam多波束系统在测量时最多可输入30个声速值[10]),因此对声速剖面点的选取非常重要,选择的声速点应该是声速剖面线的拐点和特征点,否则由选取的声速剖面点构成的拟合曲线不能代表实测声速剖面,它必然导致勘测误差,尤其在声场复杂的深水海区,往往用有限个点很难准确拟合实际声速剖面,在长期勘测中如不能定期加测声速剖面,将必然导致测量误差的产生,,.我:,使其达到最佳拟合效果,用新拟,并根据水深剩余值来评估并调整声速剖面.考虑到测量声速剖面的仪器本身也可能有一定的系统误差,需进行一些处理,如滞后订正、盐度和声速计算及噪声平滑等[2].选取合适的声速计算公式也是很重要的因素,公认准确的声速计算公式是Wilson公式,Medwin公式也很常用.相对简单的声速计算公式有Leroy公式及Frye和Pugh给出的公式[13~21].如果用求取的最佳拟合声速剖面重新计算平坦试验区海底地形仍未能得到有效改善,则需应用直接校正方法.(2)直接校正偏差数据.具体步骤是:选择一块已勘测的较平坦海区,将波束点(脚印)沿航迹方向叠加投影,首先求取海底自然倾斜角度.对误差波束的校正可以采取两种方法进行:旋转法和系数法.以中央波束点为格网点建立VIP(veryimportantpoints)点集,用VIP点集建立试验区的数字地面模型[2~9](TIN网或格网),以中央波束为原点建立局部坐标系,以其他波束与中央波束的距离为半径旋转至实际海底面,同时求取旋转后的波束位置及水深值.系数法与旋转法不同在于通过试验区求取每个勘测波束水深与实际海底水深间的误差系数,然后用该系数去校正其他海区.如果勘测结果上翘,将每个波束的传播路线自然延伸至海底面;如果下凹,则缩短波束的传播路线至海底面,本质上是增加或缩短波束的走时,由校正后的走时可以重新计算波束测点位置和水深值.求出每个实测波束走时的校正百分比,然后用该百分比(系数)去校正其他非平图3横摇偏差校正示意图4313声速改正除海洋噪声和声呐参数偏差导致的测量误差外,不准确声速剖面也是导致测量误差的一个重要因素.导致声速剖面误差的原因是多方面的:采集声速剖面的仪器精度不够、在测量时输入的声速剖面点不能很好地拟合实际声场、测区声速测站点太稀、没有及时更新声速剖面、因海况因素导致表层声速剧变、声速跃层变化过快等[1~10].声速对测深误差影响由三部分组成:(1)垂直误差;(2)声线弯曲引起的水深误差;(3)回波位置偏移以及在斜坡区由于位置偏移而引起的水深误差[2~10].可用下述公式定量计算声速造成的测深误差:ΔH=H-θvcosdt=∫ni=1∑(hiθ-tivicosi),式中,H为水深;ΔH为误差值;hi为单层水深;ti为θ声波在单层海水中的走时;vi为测量声速;i为折射角;n为水深分层数.我们不能重新采集准确的声速剖面去替代误差声速剖面,但可采取一些补救措施来校正声速剖面造成的测量误差.与声呐参数偏差导致的测量误差不同在于:用误差声速剖面勘测的平坦海区的海底地形往往表现为边缘波束上翘或下凹[2],自中央至边缘波束逐渐加剧.有两套方案可以改善由不准确4期吴自银等:多波束测深边缘波束误差的综合校正93坦海区.较之于其他方法,采用直接校正法改正多波束测深数据误差在理论上并非最佳选择.314综合校正流程高精度测深系统勘测数据误差是多种因素综合作用、叠加的结果,依靠单一方法很难彻底解决勘测中出现的精度问题,需对勘测数据的误差源进行全面分析,然后综合多种处理方法,并通过人机交互的方式多次反馈处理(图5).首先导入试验区测深数据(有条带状假地形特征),通过拟合法或投影法对测深数据进行初步编辑,剔除由海洋噪声导致的误差波束点,然后分析是否有声呐参数误差,如果有,则用沿航迹投影波束点的方法求取声呐参数偏差,最后用较准确的声呐参数去校正试验数据,并重新精细编辑,剔除被系统误差掩盖的海洋噪声数据.如果没有声呐参数误差,则进一步分析是否有声速剖面误差问题,如果存在,,新编辑.,和声速改正需要根据反馈的校正结果进行多次调整,直至试验区数据能够反映真实海底地形,达到IHO1%的精度要求[16].4应用展望(1)提高海底地形勘测数据的精度.“九五”期间已开展相关海域的多波束调查,测区范围广,水深变化区间大,已经暴露了一些测量数据精度的问题,其中以沿测线方向的条带状假地形最为明显、严重.我们的初步研究成果已为编制海底地形和海底地貌图件工作提供了及时的服务[22].(2)对将开展的后续多波束勘测项目具有指导意义.中发挥作用,对“九五”,.,其应用前景甚至被誉为海底遥感.全覆盖、高精度的多波束勘测数据也可用于微地形、地貌研究,如最近在大陆架调查中又发现了一些小型海底峡谷、陆架区线状砂脊群及冲绳海槽中央洼地中的线性海山等.精细的多波束勘测数据也为构造地貌和古环境演化研究奠定了基础.带误差的多波束勘测数据将给上述研究蒙上假象. (4)促进多波束勘测系统软硬件的国产化进程.目前我国现役的多波束系统基本都是从国外引进的,如何提高国产多波束系统的实用性能,并最终赶超国际先进水平,使我国的海洋测绘工作由对国外的依赖逐渐转为自立,其意义重大.对多波束大误差边缘波束问题的彻底解决将有利于国内的多波束系统软硬件的研制.图5大误差测深数据综合处理流程图参考文献:[1]金翔龙,高金耀.我国多波束数据综合处理成图技术的现状和对策[A].中国地球物理学会年刊[C].武汉:中国地质大学出版社,2000.230.[2]李家彪.多波束勘测原理技术和方法[M].北京:海洋出版社,1999.[3]吴自银,高金耀,方银霞,等.海底地形成图子系统MBMap的设计及特点[J].海洋通报,2002,21(1):69—79.[4]巴兰金,鲍李所夫.大陆架地形测量手段与方法[M].天津:中国人民解放军海军司令部航海保证部,1984.[5]朱维庆,魏建江.多波束测深声呐的随机误差模型[J].海洋技术,1986,2:98—104.[6]陈非凡.多波束条带测深技术的研究[J].海洋技术,1998,17(2):1—5.[7]陈非凡.多波束条带测深仪的动态测量误差评估[J].海洋技术,1999,18(1):42—45.[8]吴自银,李家彪.多波束勘测的数据编辑方法[J].海洋通报,2000,19(3):74—78.[9]朱庆,李德仁.多波束测深数据的误差处理与分析[J].武汉测绘科技大学学报.1998,23(1):1—4.[10]何高文,刘方兰.多波束测深系统声速校正[J].海洋地质与第四纪地质.2000,20(4):109—113.[11]吴自银.海底地形坡度参数分析[A].东太平洋多金属结核矿带海洋地质与矿床特征[M].北京:海洋出版社,1997.94[12]王英,李家彪,韩喜球,等.地形坡度对多金属结核分布的控制作用[J].海洋学报,2001,23(1):60—65.[13]ROBERTJU.PrinciplesofUnderwaterSound[M].3rded.NewYork:McGraw2HillBookCo mpany,1983.[14]SPIESFN.Seafloorresearchandoceantechnology[J].MTSJournal,1987,21(2):5—17.海洋学报27卷[15]TIMO2PEKKAJANTTI.TrialsandexperimentalresultsofECHOSXDmultibeamechosoun der[J].IEEEJournalofOceanicEngineer2ing,1989,14(4):306—313.[16]IHO.IHOstandardsforhydrographicsurveys:No.44.[S].4thed.SpecialPublication,1994.[17]TYCERC.SeaBeamdatacollectionandprocessingdevelopment[J].MTSJournal,1988,21(2 ):80—92.[18]LINGSCHSC,ROBINSONCS.Acousticimageryusingamultibeambathymetricsystem[J]. MarineGeodesy,1992,15:81—95.[19]FERGUSONJS,CHAYSEDA.Agenericswath2mappingdataformat[J].MarineGeodesy,1 992,15:129—140.[20]ALEXANDROD,MOUSTIERC.AdaptivenoisecancelingappliedtoSeaBeamsidelobeinte rferencerejection[J].IEEEJournalofOce2anicEngineering,1998,13(2):70—76.[21]DAVIDWC,DALENC.MultibeamdataprocessingofhydrosweepDS[J].MarineGeophysic alResearches,1996,18:631—650.[22]吴自银,金翔龙,高金耀,等.地形地貌多源数据综合成图关键技术[J].海洋学报,2003,25(增刊1):143—148.Integratederrorcorrectionofmulti2beamWUZi2yin1,2,Jng1,2,2,LIJia2biao2,YUPing3(1.Departmentof,y,Hangzhou310028,China;2.KeyLaboratoryofSubmarineGeosci2ences ofState,Hangzhou310012,China;3.MarineGeologicalSurveyBureauofGuangzhou,Guang zhou510760,)Abstract:Theerrorofmarginalbeamsmainlyinfluencesthequalityofmulti2beamsoundingda ta.Thepre2cisionofmulti2beamsoundingdatainfluencestheirreliabilityandapplication,andi tisthebaseofcorrela2tivestudy.Thekeycontrolfactorsofmarginalbeamsqualityareaccurate multi2beamsonarparameters,accuratesoundprofilesandsoundingnoisescompilation.Ifinac curatemulti2beamsonarparametersorin2accuratesoundprofilesareusedinflatareaduringthe multi2beamsurvey,unrealitysubmarinetopographywillbegotsuchasbeltalongthesurveylin e.Itisdifficulttoimprovethequalityofmulti2beamsoundingdatausingsinglemethodduringp ost2processing,becausetheerrorofmulti2beamsoundingiscausedbydifferentfactors.Onthe basisofmulti2beamsurveyprinciplesandtheacousticstheory,themulti2beamsoundingerror datahavebeenresearchedandprocessed,thesoftwareofman2machineconversationtoprocess themulti2beamerrorsoundingdatahasbeendesignedandestahlishedwithoriented2objectme thodofGISatlast.Thestudyresulthasbeenusedintopographicmappingofmarinproject. Keywords:multi2beam;errorofmarginalbeams;noisecompilation;errorcorrection。
多波束参数误差的判断及校正
多波束系统的参数误差判断及校正刘胜旋关永贤(广州海洋地质调查局510760)摘要多波束回声测深系统是当今世界上最先进的测深系统之一,高精度、高效率是其最突出的特点。
系统参数的可靠性直接影响着测量结果的精度。
本文试图对主要的系统参数误差进行分析,判断误差的种类和来源,并提出测定的方法及校正措施。
关键词多波束,纵倾偏角,横摇偏角,时间延迟,航偏角,声速剖面,潮汐改正一引言多波束回声测深系统的出现,为研究海底地形地貌、寻找沉没于水中的飞机船舰、进行水下考古、铺设海底管线、航道岸堤测量、工程疏浚的土方计算等一系列工作提供了可靠的手段。
然而,对于任何一套精密仪器,其参数正确与否,是影响整个系统性能和精度的主要因素。
因此,在正式工作前,都必须正确、严格地测定它们的各项参数。
多波束测深系统也不例外,在每一个航次前,或有关键硬件设备更换时,都应进行系统参数测定。
需要测定的系统参数有:横摇偏角(Roll bias)、纵倾偏角(Pitch bias)、时间延迟(Time Offset)、航偏角(Yaw bias)。
另外,在以上四项参数测定前,还需要作声速剖面(SVP)校正。
结合多年来的多波束工作经验,本文试图系统地介绍各参数误差的现象,判断误差的来源,并提出相应的测定和校正方法。
二声速剖面误差及校正海水是不均匀的介质,声波在海水中传播时,速度受海水温度、压力和盐度等因素影响而发生变化。
声速随着温度、压力、盐度的增大而增大,其中与温度的相关性最大,压力次之,盐度最小。
但在江河入海口、海底淡水泉口等处,由于海水与淡水的混合,盐度变得极为不均匀,声速也随时空而频繁变化。
不同的声速在海水中构成一系列声速层,使得声波传播时遵循Snell定律图1 声波在不同介质中的传播发生声线弯曲(如图1)。
声线弯曲误差对多波束测深的影响主要反映在两个方面:一是对声线传播距离的影响,也就是对覆盖宽度的影响;二是对水深测深值的影响。
图2是典型的声速误差的例子,该图是东亚交汇2号光缆路由调查的一部分,距香港大屿山南部仅25公里。
HYPAC使用说明(005b版)
G HJ\CK\QTSC\HYPACKSC15HYDROGRAPHIC SURVEY SOFTWAREHYPACK MAX操作手册广州航道局测量勘察公司广州江南大道中173号6楼第一章概述HYPACK 是美国Coastal Oceanographics Inc.公司的一个用于海洋调查和水道测量的商品软件。
HYPACK在国外用户较多,在国内的仅天津航道局和上海航道局应用较为成熟。
HYPACK MAX是为我国中港集团集体购买的行为而专门修改的版本,主要是增加了符合中国行业规范的土方量计算模式和适用于挖泥船的断面显示功能。
需要特别说明的是:HYPACK MAX的许多功能是依据国外的规范或规定来设计的,用户使用时须根据我国的行业规范和规定加以选择并灵活处理。
HYPACK MAX是32位软件(见图1—1),可在英文或中文WINDOWS95、WINDOWS98和WINDOWS NT平台下运行,但是对中文WINDOWS平台的兼容性第 1 页共 39 页不是很好。
HYPACK MAX具备通用的WINDOWS操作风格,有WINDOWS操作经验的用户,很容易就可以学会操作。
HYPACK MAX版较以前的版本增加了如下的新功能:1、增加了符合中国行业规范的土方量计算模式,分别为Chinese 1 End Area 1、Chinese 1 End Area 3、Chinese 2 End Area 1和Chinese 2 End Area 3。
2、增加了适用于挖泥船的实时断面显示比较功能(依赖上次测量数据)。
3、增加了运动传感器数据的接入、处理和显示功能(镇江船舶学院格式)。
4、增加了实时潮位数据的接入显示功能(上海航道局格式)。
5、……第 2 页共 39 页图1-1第 3 页共 39 页第 1 页 共 39 页第二章 软件的安装§2-1 配置要求HYPACK MAX 对计算机的配置要求为:1. Pentium 166以上IBM 兼容机, 16M (最好64M )RAM ;2. VGA 显示屏,最好有支持800×600(75Hz ),24色的显示卡;3. 硬盘要求为2Gb 或更大;4. 笔式或喷墨式的平板或滚筒式绘图仪(HP-GL/2语言模式);5. 数字化仪(可选);6. 英文、中文版WINDOWS 95、WINDOWS98或WINDOWS NT 操作系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Parking lot survey lines
HYPACK® data from Optech ILRIS scanning laser.
注意事项
避免使用较差的定位数据进行校准。
•如果有RTK GPS ,建议使用RTK 以获得最高的定位精度。
避免在非常浅的水域做校准
•在较深水域做校准,数据的可信度更高。 •在可以实现的情况下,在尽量深的区域做校准。
右图是探头横摇安装出现 误差时,跑往返线时对数 据造成的影响。
USACE Requirements for Patch Testing (EM1110-2-1003)
•在多波束系统最初安装后应进行校准,且在每次各设备位置改变,重新安装择平坦地形. • 选择大的起伏地形,沿开挖好的平坦航道即可校准
•在每一个偏差度数下计算出一个误差值.
•误差值最小的角度通常即位偏差角度,但个别情况下不是这样,还需注意计算结 果的合理性.
较好的校正结果
•两条线重合度高. •误差值在最小的位置
较差的校正结果
•两条线重合度低. •误差值大
校准窗口
使用MBMAX中的剖面工具,选择合适的显示方法. • 选择显示的内容
• Different line geometry to overlap port and starboard heads separately.
• Requires 3 survey lines instead of 2. • Lines A and B overlap starboard head. • Lines B and C overlap port head.
延迟,纵摇与朝向校准:
• 选择较大的起伏地形。 • 开挖的航道边坡可以用来校准。 • 也可以使用水下布放的管线位置校准。 • 有时可以在符合上述所有要求的同一个区域完成校准。
所有的校准都可以在上图中完成,图中既有平坦地形,也有起伏地形。
单探头布线方式:
横摇校准:
• 选择线A-B,平坦地形,按照正常测量航速跑往返线
不要只进行一次校准。
实际操作中,安装后,建议进行多次校准检测取平均值。 (MBMAX 中有工具 可以保存各次结果。)
校准过程
在 MBMAX64中,用户可以一次载入所有的测线,然后选择需 要在后边进行校准的测线。
选定一对数据后,即可进行校准,如下图所示的数据,两组数据在边沿拼接不好 ,该问题可以通过安装校准解决.
如果计算出一个与其它结果偏差非常大的值,重新计算,直到结果达 到合理的范围.
结果
误差计算曲线
好的结果
不理想结果. U型的误差计算结果是希望达到的效果, 但计算结果并不总是这样的.
计算结果显示: 最初值:在校正前的偏差值 (从HYSWEEP® 硬件设置 中读取) •调整: 相对于最初值的校正改正值. •最终值:在HYSWEEP®中设定的新校正值
• 设置每次载入的 剖面数据量
• 选择校准参数与 声纳头
• 选择步进值
• 开始校准
• 软件将自动计算出误差最小的结果.完成后,点击OK ,完成校准.
校准窗口
当一次计算完成后,使用更小的步进值更精细的计算.当用户满意于当前计算 结果时,点击OK 完成一个参数计算.
可选项: •保存计算结果的历 史以多次计算取平 均. •更新配置文件.自动 设置HYSWEEP中 的硬件参数. •将计算结果保存成 报告.
Some dual head systems are engineered mounting frames can be treated as single head.
Overlap: Green = Port Head. Red = Starboard Head.
激光扫描仪布线方式(本系统不适用)
多波束安装校准
HYSWEEP®
多波束校准
• 进行单探头或双探头多波束校准. • 也可以进行激光扫描仪安装校准.
多波束安装校准
多波束校准可以确定下面的参数:
多波束探头安装的横摇,综摇与朝向偏差。测量的偏差角 是从多波束探头到MRU及船朝向的偏差。安装偏差可以 导致水深数据的深度值及位置出现偏差。 •GPS延迟。延迟可以导致水深数据的位置误差。
•使用 “Wrench”工具手工切 割选择的校正区域.
•横摇校正:平坦地形,与测线 方向相垂直的方向.
•纵摇校正:起伏区域,与测线 方向相平行的方向.Pitch section:
•朝向校正:起伏区域,与测线 平行方向的两条平行线.
•延迟校正:起伏区域,与测线 方向平行.
校准方法
数值计算
•对重叠的部分在各个角度下计算.例如:纵摇计算范围为-10 到 10 度,步进值为1 度.
The best patch area is a parking lot with light posts! • Line pairs A-C or B-D can be compared for all
alignments: roll, pitch and yaw.
If you need to do it in water, find a day marker or piling out of the water
纵摇校准:
• 选择线C-D,起伏地形,按照正常测量航速跑往返线。
朝向校准:
• 线C-D与线E-F,起伏地形,按照正常测量航速同向跑平行线,两线之间有50% 数据重叠。
延迟校准:
• 线C-D, 起伏地形,按照高低两种船速同向跑同一根线。
A
D
C
F
E
B
双探头布线方式(本系统不适用)
Roll and Pitch Test
历史报告中有偏差值与标准 偏差
计算顺序与重复计算
处理顺序不同可能导致结果不同
•首先计算系统延迟 (如果有必要计算延迟) •应用延迟计算结果,然后计算纵摇误差. •应用纵摇误差计算结果,然后计算横摇误差. •应用横摇误差计算结果,然后计算朝向偏差.
再一次计算,以确定计算的准确性.
•在得到最初的结果后,再次计算,检测结果. •使用同样的计算顺序:纵摇,横摇,朝向. •多次计算可以得到更可靠的数据.