非线性与离散系统
离散时间信号和系统理论知识介绍

离散时间信号和系统理论知识介绍离散时间信号和系统理论是信号与系统理论领域的重要分支,用于描述和分析在离散时间点上的信号及其相应的系统行为。
离散时间信号是在离散时间集合上定义的函数,通常由离散采样得到。
离散时间系统则是对输入离散时间信号进行操作和处理得到输出信号的过程。
离散时间信号是时间的一个离散序列,可以通过对连续时间信号进行采样得到。
最常见的离散时间信号是离散时间单位脉冲信号,其在一个时间点的值为1,其他时间点的值为0。
其他常见的离散时间信号包括阶跃信号、正弦信号、方波信号等。
每个离散时间信号都有其特定的频谱和幅度特性。
离散时间系统是对离散时间信号进行处理和操作的载体。
离散时间系统可以是线性系统或非线性系统。
线性系统可以通过线性时不变(LTI)系统模型来描述,即系统的输入和输出之间存在线性时不变关系。
LTI系统可以用巴特沃斯(Bartow)方程式或其它传输方程式来表示,并可以通过离散时间卷积来分析系统的响应。
非线性系统则不满足线性性质的要求,其描述和分析方法更为复杂。
离散时间信号和系统理论的基本概念包括线性性、时不变性、因果性和稳定性等。
线性性要求系统对输入信号的加法性和乘法性具有反应;时不变性要求系统的性质不随时间变化而改变;因果性要求系统的响应仅依赖于过去和当前的输入信号;稳定性要求系统的输出有界且有限。
离散时间信号和系统的分析方法包括时域分析和频域分析。
时域分析主要关注信号和系统在时间域上的行为,如脉冲响应、单位样本响应、单位阶跃响应等;频域分析则关注信号和系统在频域上的特性,如频谱分析、频率响应等。
离散时间信号和系统在实际应用中有广泛的应用。
例如,它们可以用于数字音频处理、数字图像处理、通信系统、控制系统等领域中。
在这些应用中,离散时间信号和系统的理论方法可以帮助我们分析和设计系统,优化信号处理算法,并提高系统的性能。
总而言之,离散时间信号和系统理论是信号与系统理论中重要的一部分,用于描述和分析离散时间信号和系统的特性。
非线性离散薛定谔方程的显式精确解

cosh ( k) ) , r = 1, a0 = a1 = 0,
b1 = ±
( (
co sh ( k) 1 + cosh
- 1) ( k) )
,
c = 4 sin ( p) sinh ( k) / ( 1 + cosh ( k) ) ;
( 5) q = 2 ( 1 + cosh ( k) - 2cos( p) ) /
第 4期 朱加民 :非线性离散薛定谔方程的显式精确解
·403·
到了方程的精确解 。
1 双曲函数方法简述
为方便对改进的双曲函数方法的论述 ,以 ( 2
+ 1)维非线性差分微分方程为例 。设非线性差
分微分方程 (DDE)为
Δ( un + p1 ( x, t) , un + p2 ( x, t) , …,
+ co sh ( k) ) , a0 = 0, a1 = a1 ,
b1 = ±
( co sh ( k) - 1) (1 + cosh ( k) )
r= ±
( a21
-
1
+ cosh ( k) + a21 cosh ( k) ( cosh ( k) - 1
) ,
c = 4 sin ( p) sinh ( k) / ( 1 + cosh ( k) ) 。
( cosh2 ( k) - 1) cosh ( k)
tanh
(
kn
+ 2 sin
( p) sinh co sh ( k)
( k)
t
+ζ)
ei (
pn
+
2
( cosh2 ( k) - co s( p) cosh2 ( k)
离散控制系统的非线性控制设计

离散控制系统的非线性控制设计离散控制系统是一种常用于工业自动化领域的控制系统。
非线性控制设计是指在系统非线性特性存在的情况下,设计合适的控制策略以达到系统稳定控制的目标。
本文将介绍离散控制系统的非线性控制设计方法以及其应用。
1. 引言离散控制系统在工业中广泛应用,例如在机械制造、化学工程和电力系统等领域。
然而,受到系统本身的非线性特性的影响,传统的线性控制方法往往无法获得满意的性能。
因此,非线性控制设计成为离散控制系统中重要的研究方向。
2. 非线性控制设计方法为了解决离散控制系统的非线性特性,研究人员提出了多种非线性控制设计方法。
以下是其中几种常见的方法:2.1 反馈线性化控制反馈线性化控制是一种通过将非线性系统进行状态转换,使得转换后的系统线性化,然后设计线性控制器进行控制的方法。
它通过计算非线性系统的反馈线性化矩阵,将非线性系统映射到一个线性系统,从而简化了控制器的设计和分析过程。
2.2 滑模控制滑模控制是一种通过引入滑模面来实现对系统的非线性特性进行控制的方法。
滑模面是一条求解系统状态的曲线,通过引入滑模面,可以将非线性系统的行为限制在滑模面上,从而实现对系统的控制。
2.3 自适应控制自适应控制是一种通过根据系统的实时状态和误差信号来调整控制器参数的方法。
它可以自动调整控制器参数以适应系统的非线性特性和变化的工作条件,从而提高系统的控制性能。
3. 非线性控制设计的应用非线性控制设计方法在离散控制系统中有广泛的应用。
以下是其中几个典型的应用案例:3.1 机械制造在机械制造过程中,离散控制系统常用于控制机器人的运动和姿态。
由于机器人的非线性特性,传统的线性控制方法无法满足对机器人运动的精确控制要求。
非线性控制设计方法可以通过引入反馈线性化控制或者滑模控制,实现对机器人的精确控制。
3.2 化学工程在化学工程过程中,离散控制系统常用于控制反应器或者传输管道。
由于反应器的非线性特性,传统的线性控制方法无法满足对反应器的稳定控制要求。
《自动控制原理》试卷及答案(a6套)
自动控制原理试卷A(1)1.(9分)设单位负反馈系统开环零极点分布如图所示,试绘制其一般根轨迹图。
(其中-P 为开环极点,-Z ,试求系统的传递函数及单位脉冲响应。
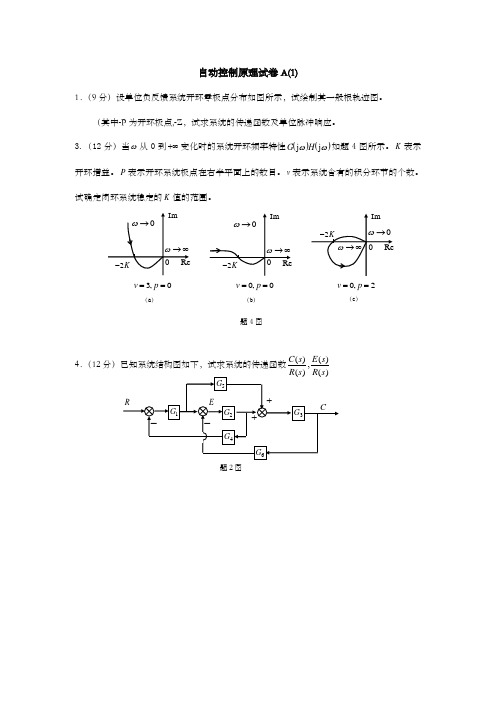
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。
K 表示开环增益。
P 表示开环系统极点在右半平面上的数目。
v 表示系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C,3==p v (a ),0==p v (b )2,0==p v (c )题4图题2图5.(15分)已知系统结构图如下,试绘制K 由0→+∞变化的根轨迹,并确定系统阶跃响应分别为衰减振荡、单调衰减时K 的取值范围。
6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
7.(15分)离散系统如下图所示,试求当采样周期分别为T=0.1秒和T=0.5秒输入)(1)23()(t t t r ⋅+=时的稳态误差。
8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图所示,试判断系统稳定性,并指出)(1x N和G (j ω)的交点是否为自振点。
参考答案A(1)1、 根轨迹略,2、 传递函数)9)(4(36)(++=s s s G ;单位脉冲响应)0(2.72.7)(94≥-=--t ee t c tt 。
3、 21,21,21><≠K K K 4、6425316324215313211)()(G G G G G G G G G G G G G G G G G G s R s C ++++= 642531632421653111)()(G G G G G G G G G G G G G G G G G s R s E +++-= 5、 根轨迹略。
离散系统的基本概念

06
CATALOGUE
离散系统的发展趋势与展望
离散系统的新理论与方法
离散系统的新理论
随着科技的不断发展,离散系统的新理论也在不断涌现。例如,离散概率论、离散控制论、离散信息论等,这些 新理论为离散系统的发展提供了重要的理论支持。
离散系统的新方法
在实践中,人们不断探索新的方法来处理离散系统的问题。例如,离散数学、离散优化算法、离散模拟技术等, 这些新方法为离散系统的研究提供了更有效的工具。
状态转移图的绘制方法
根据状态方程,通过计算或模拟得到状态变量的时间序列解,并绘 制成图形。
状态转移图的应用
通过观察状态转移图,可以直观地了解系统动态行为和变化趋势。
04
CATALOGUE
离散系统的稳定性分析
线性离散系统的稳定性分析
定义
线性离散系统是指系统 的数学模型可以表示为 离散时间的线性方程组 ,如差分方程或离散时 间状态方程。
状态方程
1
状态方程是描述离散时间动态系统状态变化的基 本方程,通常表示为离散时间序列的递推关系。
2
状态方程通常由当前状态和输入量来预测下一个 状态,是离散系统分析的重要基础。
3
状态方程的解法包括递归法和矩阵法等,其中递 归法较为直观,而矩阵法适用于大规模系统。
转移矩阵
转移矩阵是描述离散系统状态转移关系的矩阵,其元素表示状态之间的转 移概率。
社会科学领域
在社会学、经济学、管理学等领域中,离散系统也有着广泛的应用。例如,在经济学中,离散模型被用 于描述经济活动中的离散事件;在社会学中,离散模型被用于描述社会结构和社会动态。
离散系统未来的研究方向
要点一
复杂离散系统的研究
随着科技的不断发展,复杂离散系统 的研究已经成为一个重要的研究方向 。例如,复杂网络、离散事件动态系 统等,都是复杂离散系统的研究重点 。
离散控制系统中的模型控制设计
离散控制系统中的模型控制设计离散控制系统是现代控制领域中的重要研究方向之一。
它涉及到对离散时间信号进行采样、量化和控制的技术。
离散控制系统的模型控制设计是对这些系统的建模和控制器设计的过程,具有广泛的应用价值和实际意义。
1. 离散控制系统的基本模型在离散控制系统中,系统的输入和输出信号在时间上是离散的。
常见的离散控制系统模型包括差分方程模型和状态空间模型。
对于线性时不变系统,可以使用差分方程模型描述系统的输入输出关系。
而对于非线性或时变系统,常常使用状态空间模型来描述系统的动态行为。
2. 模型控制设计的目标离散控制系统的模型控制设计的目标是设计一个控制器,使得系统的输出能够满足预期的性能指标。
通常的性能指标包括系统的稳定性、快速性和抗干扰能力。
在模型控制设计中,需要根据系统的数学模型和性能指标,选择合适的控制器结构和参数,以实现对系统的精确控制。
3. PID控制器设计PID控制器是离散控制系统中最常用的控制器之一。
它由比例(P)、积分(I)和微分(D)三个部分组成,通过对系统的误差信号进行加权运算,调节系统的输出。
PID控制器的设计可以通过经验法则或者优化算法来实现。
常用的经验法则包括Ziegler-Nichols法则和Chien-Hrones-Reswick法则。
4. 线性二次调节器设计线性二次调节器(LQR)是离散控制系统中一种优化控制方法。
它通过最小化系统输出与期望输出之间的误差的平方和,设计一个线性状态反馈控制器。
LQR控制器采用系统的状态反馈控制策略,通过对状态变量进行测量和调节,实现对系统的稳定性和性能的优化。
5. 系统辨识与模型预测控制系统辨识是离散控制系统中的关键技术之一,它通过对实际系统的输入输出数据进行分析和处理,确定系统的数学模型。
基于系统辨识得到的数学模型,可以应用模型预测控制(MPC)方法进行系统控制。
MPC控制器通过对未来一段时间内系统的状态进行预测,计算控制信号,实现对系统的控制和优化。
现代控制理论 离散时间系统、 时变系统和非线性系统的状态空间表达式

《现代控制理论》MOOC课程1.5 离散时间系统、时变系统和非线性系统的状态空间表达式一. 时间离散系统离散系统的状态空间表达式可用差分方程组表示为x(k +1)=Gx(k)+Hu (k)y k =Cx k +Du(k)二. 线性时变系统其系数矩阵的元素中至少有一个元素是时间t 的函数;线性时变系统的状态空间表达式为:x =A t x +A t u y=C t x +D t u三. 非线性系统x =f (x,u , t )y=g (x,u,t)1.非线性时变系统的状态空间表达式式中,f ,g 为函数向量;x =f (x,u )y=g (x,u)2.非线性定常系统的状态空间表达式当非线性系统的状态方程中不显含时间t 时,则称为非线性定常系统3.非线性系统的线性化x =f (x,u )y =g (x,u)设是非线性系统x 0,u 0的一个平衡状态, 即。
f (x 0,u 0)=0 , y 0=g (x 0,u 0)若只考虑附近小范围的行为,则可将非线性系统取一次近似而予以线性化。
x 0,u 0,y 0将非线性函数f 、g 在附近作泰勒级数展开,并忽略高次项,仅保留一次项:x 0,u 0f x,u =f x 0,u 0+ðf ðx x 0,u 0δx +ðf ðu x 0,u 0δu g x,u =g x 0,u 0+ðg ðx x 0,u 0δx +ðg ðu x 0,u 0δu则非线性系统的一次线性化方程可表示为:δx =x −x 0=ðf ðx x 0,u 0δx +ðf ðu x0,u 0δu δy =y −y 0=ðg ðx x 0,u 0δx +ðg ðu x 0,u 0δu 将微增量用符号表示,线性化状态方程就表示为:δx ,δu ,δy x ,u ,y x=A x +B u y=C x +D u 其中,A =ðf ðx x 0,u 0,B =ðf ðu x 0,u 0,C =ðg ðx x 0,u 0,D =ðg ðu x 0,u 0第一章控制系统的状态空间表达式第一章小结状态变量、状态空间、状态空间表达式的定义建立系统状态空间表达式的方法,特别是状态变量选取的方法;状态空间表达式非奇异线性变换的方法;由状态空间表达式导出传递函数矩阵的方法;组合系统状态空间表达式的建立方法;离散系统、非线性系统状态空间的基本形式;。
自动控制原理:自动控制系统的性能指标
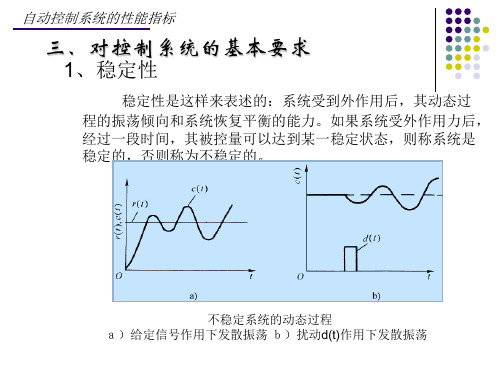
自动控制系统的类型
2. 性质 ① 满足叠加原理 ② 齐次定理
1)叠加性:如果用c1(t)表示由r1(t)产生的 输出,用c2(t)表示由r2(t)产生的输出,则 当r1(t)和r2(t)同时作用时,输出量为c1(t) + c2(t) 。
2)齐次性:如果用c(t)表示由r(t)产生的 输出量,则在Kr(t)作用下的输出量为 Kc(t)。
自动控制系统的类型
3. 判断方法
对方程
a0
d n yt
dtn
a1
d n1 yt
dt n1
...
an
yt
b0
d m xt
dtm
b1
d m1xt
dt m1
...
bm xt
其中x(t)为输入量,Y(t)为输出量.
若方程中,输入、输出量及各阶导数均为一次幂,且各 系数均与输入量(自变量)X(t)无关.就可定义为①, 用拉氏变换可求出输入输出关系函数(传递函数,动态 数模)。
处或几处的信号是离散信号,则称为离散系统。 对控制系统性能的主要要求是稳定性、暂态性能和稳态性能等几个方
面。这些性能常常是互相矛盾的。
《自动控制原理》国家精品课程 浙江工业大学自动化研究所 14
第二章
§2 自动控制系统的数学模型
0 序言 §2-1 动态微分方程式的编写 §2-2 非线性数学模型线性化 §2-3 传递函数 §2-4 系统动态结构图 §2-5 系统传递函数和结构图的等效变换 §2-6 信号流图
导读
为什么要介绍本章?
分析、设计控制系统的第一步是建立系统的数学模型。
本章主要讲什么内容?
首先介绍控制系统数学模型的概念,然后阐述分析、设计控 制系统常用的几种数学模型,包括微分方程、传递函数、结构 图以及信号流图。使读者了解机理建模的基本方法,着重了解 这些数学模型之间的相互关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《非线性与离散系统》课程教学大纲
Nonlinear and Discrete Control System
课程编号:2000492 学时数:32
适用专业:电气工程及其自动化学分数:2学分
执笔者:王艳邱瑞昌编写日期:2002.5
一、课程的性质和目的
课程性质:非线性离散控制系统是电气工程及其自动化专业的技术基础选修课之一。
主要目的:培养学生
1、掌握非线性控制系统、离散控制系统的分析方法;
2、学会使用非线性环节改善系统的动态性能及用离散系统的理论分析数字系统;
3、掌握典型非线性环节及采样系统的实验方法,获得实验技能的基本训练。
4.了解非线性控制系统和离散控制系统的发展方向。
二、课程教学内容
第一章非线性控制系统
内容:理解非线性控制系统的基本概念及其与线性控制系统的区别,掌握非线性控制系统的两种分析方法 描述函数法和相平面法;学会利用非线性特性改善系统的动态性能。
了解如何运用计算机对非线性系统进行辅助分析和设计。
重点:描述函数法、相平面法。
难点:运用两种分析法分析非线性系统。
作业:9个。
自学内容:典型环节描述函数的求取,(自学不占课时,但要考试)。
自学前给出求取描述函数的一般方法,自学后布置作业检验自学效果。
课堂讨论:如何利用非线性特性改善控制系统的动态性能。
实验环节:非线性控制系统的综合与校正、采样控制系统设计实验。
第二章线性离散控制系统
理解采样过程的数学描述,掌握采样定理,会确定采样周期;掌握信号如何恢复和保持,会运用Z变换求取系统的脉冲传递函数;会分析线性离散系统的稳定性;学会运用时域分析法分析离散系统;了解数字控制器的模拟化和数字化的设计方法。
重点:采样定理、信号的采样和保持、Z变换、脉冲传递函数、离散系统的稳定性。
难点:采样过程、离散系统的稳定性、数字控制器的设计。
作业:8个。
自学内容:Z变换与Z的反变换,(自学不占课时,但要考试)。
自学前对内容作简要介绍,自学后布置作业检验自学效果。
课堂讨论:数字控制器的设计方法。
实验环节:采样控制系统的校正
三、课程教学的基本要求
本课程的教学环节包括:自学、课堂讲授、自制多媒体电子课件、习题课、课外作业、实验。
通过本课程各个教学环节的教学,重点培养学生的自学能力、动手能力、分析问题和解决问题的能力。
(一)课堂讲授
1、教学方法:
采用启发式教学,鼓励学生自学,培养学生的自学能力;精选教学内容,精讲多练;思考题和课外作业为主,调动学生学习的主动性。
2、教学手段:
课堂讲授与电子教案授课相结合,开展CAI课件的研制、引进和应用、研制多媒体教学系统。
3、计算机的应用:
在模拟非线性系统、离散系统仿真实验的同时,适当安排学生上机使用MATLAB软件作数字仿真实验。
4、外语的要求
在讲授过程中,给出各章节主要专业名词的英语单词,通过本课的学习,学生可接触到80个左右专业名词的英语单词。
如:Nonlinear time-invaried Control System(非线性时不变控制系统) saturation nonlinearity(饱和非线性) dead-zone nonlinearity (死区非线性) backlash nonlinearity(间隙非线性) describing function(描述函数) phase plane (相平面)phase portraits(相轨迹) singular points(奇点)limit cycles(极限环) Linear time-invariant discrete System(线性离散时不变系统) difference equations(差分方程) z-transform(Z变换) inverse z-transform (Z反变换)sampled data(采样) data reconstruction (信号保持)pulse transfer function(脉冲传递函数) zero-order hold(零阶保持器) digital filter(数字滤波器) discrete system stability (离散系统的稳定性)
(二)教学辅助资料
《自动控制原理习题集》,引导学生复习和自学。
实验指导书,非线性离散系统试题库。
(三)实验环节
两个设计性实验。
(四)习题课、
第一章:4个。
第二章4个
(五)作业方面
1、目的:
巩固讲授的基本理论知识;培养解题能力和技巧;学会分析非线性系统和离散系统,了解数字控制器的设计方法。
2 、课外习题内容:
第一章 9个。
第二章8个。
(六)考试环节
考试形式采用笔试,题型有:填空、选择、问答、计算。
四、本课程与其它课程的联系与分工
本课程的先修课为:电路基础、电机拖动及其控制系统、自动控制原理等。
后续课程《现代控制理论》、《最优控制》、《过程控制》、《计算机控制》、《控制系统的计算机仿真》等。
五、建议教材及教学参考书:
1、吴麒主编,《自动控制原理》清华大学出版社
2、戴忠达,《自动控制理论基础》清华大学出版社
3、Feedback Control Systems Phillips PRENTICE HALL Cliffs,New Jersey 07632
4、非线性离散系统实验指导书
六、对教师的基本要求:
1、熟练掌握非线性时不变系统和线性离散系统的分析方法,了解这两种系统的发展方
向,同时了解非线性时变系统和非线性离散系统的基本分析方法。
2、能够改革这两种系统的仿真方法,使学生最终能够达到设计系统的目的。