湿度控制系统设计外文翻译
湿度与温度控制系统说明书
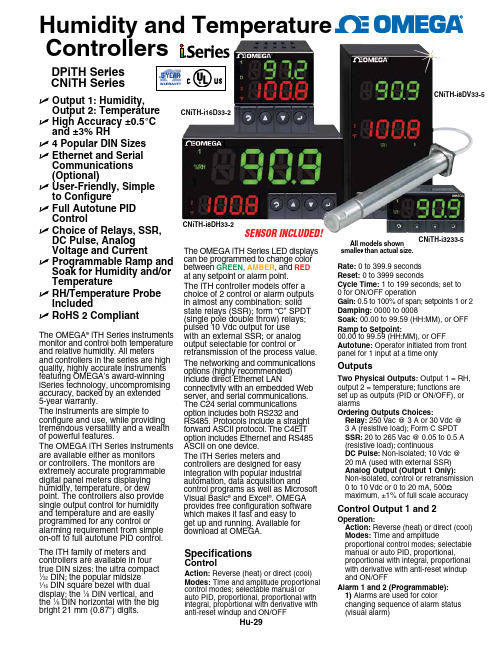
U O utput 1: Humidity, Output 2: Temperature UU 4 Popular DIN Sizes UE thernet and Serial Communications (Optional)U U ser-Friendly, Simple to Configure UF ull Autotune PID Control UC hoice of Relays, SSR, DC Pulse, Analog Voltage and Current U P rogrammable Ramp and Soak for Humidity and/or Temperature U R H/Temperature Probe Included U R oHS 2 CompliantRate: 0 to 399.9 seconds Reset: 0 to 3999 secondsCycle Time: 1 to 199 seconds; set to 0 for ON/OFF operationGain: 0.5 to 100% of span; setpoints 1 or 2Damping: 0000 to 0008Soak: 00.00 to 99.59 (HH:MM), or OFF Ramp to Setpoint:00.00 to 99.59 (HH:MM), or OFFAutotune: Operator initiated from front panel for 1 input at a time onlyOutputsTwo Physical Outputs: Output 1 = RH, output 2 = temperature; functions are set up as outputs (PID or ON/OFF), or alarmsOrdering Outputs Choices: Relay: 250 Vac @ 3 A or 30 Vdc @ 3 A (resistive load); Form C SPDT SSR: ******************.5A (resistive load); continuousDC Pulse: Non-isolated; 10 Vdc @ 20 mA (used with external SSR) Analog Output (Output 1 Only):Non-isolated, control or retransmission 0 to 10 Vdc or 0 to 20 mA, 500Ω maximum, ±1% of full scale accuracyControl Output 1 and 2Operation:Action: Reverse (heat) or direct (cool) Modes: Time and amplitudeproportional control modes; selectable manual or auto PID, proportional, proportional with integral, proportional with derivative with anti-reset windup and ON/OFFAlarm 1 and 2 (Programmable): 1)Alarms are used for colorchanging sequence of alarm status (visual alarm)The OMEGA iTH Series LED displayscan be programmed to change color between GREEN , AMBER , and RED at any setpoint or alarm point.The iTH controller models offer a choice of 2 control or alarm outputs in almost any combination: solid state relays (SSR); form “C” SPDT (single pole double throw) relays; pulsed 10 Vdc output for usewith an external SSR; or analog output selectable for control or retransmission of the process value. The networking and communications options (highly recommended) include direct Ethernet LANconnectivity with an embedded Web server, and serial communications. The C24 serial communications option includes both RS232 and RS485. Protocols include a straight forward ASCII protocol. The C4EIT option includes Ethernet and RS485 ASCII on one device.The iTH Series meters and controllers are designed for easy integration with popular industrial automation, data acquisition and control programs as well as Microsoft Visual Basic ® and Excel ®. OMEGA provides free configuration software which makes it fast and easy to get up and running. Available for download at OMEGA.The OMEGA ®iTH Series instruments monitor and control both temperature and relative humidity. All meters and controllers in the series are high quality, highly accurate instruments featuring OMEGA’s award-winning iSeries technology, uncompromising accuracy, backed by an extended 5-year warranty.The instruments are simple to configure and use, while providing tremendous versatility and a wealth of powerful features.The OMEGA iTH Series instruments are available either as monitors or controllers. The monitors are extremely accurate programmable digital panel meters displaying humidity, temperature, or dew point. The controllers also provide single output control for humidity and temperature and are easily programmed for any control or alarming requirement from simple on-off to full autotune PID control.The iTH family of meters and controllers are available in four true DIN sizes: the ultra compact 1⁄32 DIN; the popular midsize 1⁄16 DIN square bezel with dual display; the 1⁄8 DIN vertical, and the 1⁄8 DIN horizontal with the big bright 21 mm (0.87") digits.SpecificationsControlAction: Reverse (heat) or direct (cool)Modes: Time and amplitude proportional control modes; selectable manual or auto PID, proportional, proportional with integral, proportional with derivative with anti-reset windup and ON/OFFDPiTH SeriesCNiTH SeriesHumidity and Temperature ControllersSENSOR INCLUDED!CNiTH-i8DV33-5CNiTH-i16D33-2CNiTH-i8DH33-2CNiTH-i3233-5All models shownsmaller than actual size.High Accuracy ±0.5°C and ±3% RH*2 -C4EIT or -EIT option is not available on the 1⁄32 DIN. Refer to the iServer section for other Ethernet devices that can connect to a CNiTH-i32xx-x-C24.Units can be powered safely with 24 Vac power, but no certification for UL are claimed.Ordering Examples: CNiTH-i8DH43-5-C4EIT, horizontal 1⁄8 DIN dual display with pulse and relay outputs, a 127 mm (5") probe and Ethernet with embedded Web server.DPiTH-i16D-2-EIT, 1⁄16 DIN dual display with a 51 mm (2") probe and Ethernet with embedded Web server.2)Alarm functions are active,in addition to the color changing functions, if output 1 and 2 are (menu) disabled3)If alarms are disabled, output menus (PID or ON/OFF) are active;color change is still activeOperation: High/low, above/below, band, latch/unlatch, normally open/normally closed and process/deviation; front panel configurations-AL Limit Alarm Version: Output 1 and 2 submenus used for PID are eliminated from menu; color sequence based on alarm setpoints is still availableInputEthernet: Standards compliance IEEE 802.3 10Base-TSupported Protocols: TCP/IP, ARP, HTTPGETRS232/RS422/RS485: Selectable from menu; both ASCII and MODBUS protocol selectable from menu; programmable 300 to 19.2 K baud; completeprogrammable setup capability; program to transmit current display, alarm status, min/max, actual measured input value and statusRS485: Addressable from 0 to 199Connection: Screw terminalsGeneralA/D Conversion: 12-bit RH and 14-bit temp Reading Rate: 2 samples per sec max Digital Filter: ProgrammableDecimal Selection: None, 0.1 for temperature and humidityDisplay: 4-digit, 9-segment LED i32, i16D, i8DV: 10.2 mm (0.40") i8: 21 mm (0.83")i8DH: 10.2 mm (0.40") and 21 mm (0.83") RED , GREEN and AMBERprogrammable colors for process variable, setpoint and temp unitsOperating Temperature: 0 to 50°C (32 to 122°F), 90% RH non-condensing Protection:i32, i16D: NEMA 4X (IP65) front bezel i8DH, i8DV: NEMA 1 (IP23) front beze l Power: Refer to ordering guide*Note: Extended temperature range is for industrial probe only, the controller’s operating temperature is 0 to 50°C.Network and Serial Communications(For Options -C24, -C4EIT, -EIT)Accuracy/Range @ 25C - Non-condensing:±3% for 10 to 90%;±3.5% for 5 to 10% and 90 to 95%±4% for 0 to 5% and 95 to 100%Hysteresis: ±1% RH Non-linearity: ±3%Temperature Accuracy/Range*±0.5°C for 5° to 45°C (±1°F for 41 to 113°F); up to ±1.5°C for -40° to 5°C and 45° to 124°C (up to ±2.7°F for -40° to 41°F and 113° to 255°F)Resolution: 0.1%, 12bit for RH; 0.1°C, 14 bit for temperatureResponse Time: 8 seconds, tau 63% for RH; 5 to 30 seconds, tau 63% for temperature。
温湿度测量仪外文文献翻译、中英文翻译

外文翻译英文原文:Temperature and humidity measuring instrumentIntroductionTemperature and humidity measurement is a modern newly developed measurement field, especially the humidity measurement is to continue moving forward. Experienced a length method, dry and wet until today the course of the measurement, humidity measurement technology is maturing. Today, we are no longer satisfied with the measurement of the temperature and humidity, especially in some places to monitor directly the requirements of real-time measure and record the temperature and humidity changes in the whole process, and based on these changes identified during storage and transportation security, led to a new temperature and humidity measuring instrument was born. Temperature and humidity measuring instrument is the temperature and humidity parameters were measured according to a predetermined time interval stored in the internal memory, in the completion of the recording function will be coupled to a PC, use the adapter software data stored in accordance with values time analysis instrument. The instrument can determine the storage and transportation process, experiment process without any compromise product safety incident.MSP430F437 IntroducedThe MSP430 MCU main features are as follows:1)Ultra-low power consumption. MSP430 MCU supply voltage 1.8 to 3.6V low voltage RAM data retention mode power consumption of only 0.1uA active mode power 250uA/MIPS, IO input port leakage current of only 50nA.2)Powerful processing capability. The MSP430 MCU 16-bit microcontroller, reduced instruction set architecture with the most popular one clock cycle to execute an instruction, the MSP430 instruction speeds of up to 8MHz oscillator is 8MIPS.3)High-performance analog technology and a wealth of on-chip peripheral modules. The MSP430 monolithic organic combination of TI's high-performance analog technology, each member of the rich on-chip peripherals are integrated. Depending on the model of the different possible combinations of the following modules: watchdog,analog comparator A timer A, timer B, serial 0,1, hardware multiplier, LCD driver, 10/12/14-bit ADC, 12 DAC IIC bus, direct data access, port 1 to 6, the basic timer. 4)The system is stable. Power-on reset, first initiated by the DC0 CPU, to ensure that the program starts executing from the correct position to ensure crystal oscillator start-up and stabilization time. The software can then set the appropriate control bits of the register to determine the final system clock frequency. If the crystal oscillator is used as the CPU clock MCLK failure, the DCO will start automatically, in order to ensure the normal operation of the system. This structure and operational mechanism in the current series microcontroller is unique.5)Convenient and efficient development environment. MSP430 series OTP type, three types of FLASH-ROM, the domestic large-scale use FLASH. The development of these devices means, after the successful development of the OTP and ROM-type device using a dedicated emulator programmer or chip cover touch. FLASH type is very convenient development and debugging environment, because the device on-chip JTAG debug interface, as well as the electric flash FLASH memory using the first through the JTAG interface to download the program to the FLASH, run by the JTAG interface control program read the on-chip CPU status, and memory contents and other information for designers debug the entire development can be carried out in the same software integrated environment. Which only requires a PC and a JTAG debugger, without the need for a dedicated emulator and programmer. Temperature And Humidity SensorThe SHT7x temperature and humidity sensor characteristics are as follows:1)The temperature and humidity sensor signal is amplified conditioning, A / D converter, all integrated on one IIC bus interface;2)Given calibration relative humidity and temperature output;3)IIC bus with industry-standard digital output interface;4)With dewpoint calculation output function;5)With excellent long-term stability;6)Humidity value output resolution of 14 The temperature output resolution of 12 bits, and programmable;7)Small size (7.65 x 5.08 x 23.5mm) Surface Mount;8)Having reliable the CRC data transmission checking function;9)The chip load calibration coefficients can guarantee 100% interchangeability;AT25256 IntroductionTemperature and humidity data storage chip SPI interface uses ATMEL Corporation's low-voltage serial EEPROM AT25256. AT25256 is mainly applied to low-power occasion the internal accordance with 32K x 8-bit organization, can work at 3.3V, the maximum serial clock frequency as to 2.1MHz. Support for 64-byte page write mode and byte write mode. AT25256 by setting the write-protect pin / WP level to set the chip read-only or writable state. Serial Peripheral Interface (SPI) bus technology is a synchronous serial interface, the hardware features a strong, SPI software is quite simple, so that the CPU has more time to deal with other matters. SPI bus can be connected to multiple host MCU, equipped with SPI interface output devices, output devices, such as LCD drivers, A / D conversion and other peripherals can also be a simple connection to a single TTL shift register chip. The bus allows you to connect multiple devices, but only one device at any moment as the host.SPI bus clock line is controlled by the host, in addition to data lines: host input / output line from the machine and the host output / slave input line. Host and which slave communication through the slave strobe line selection.Application SPI system can be simple, complex and can take many forms: (1) a host MCU and the slave MCU; (2) multiple MCU are connected to each other into a multi-host system; (3) a host MCU and slave peripherals.Segment LCD Display PrincipleLCD display principle is to use the physical characteristics of the liquid crystal born, when power is turned on, arranged order so light by; arranged confusion is not energized, to prevent the light to pass through. Light to pass through and not through a combination of an image is displayed on the screen. In layman's terms, the liquid crystal display is the middle of the two glass clip a layer of liquid crystal material, the liquid crystal material to change their light transmission in the signal under the control of the state, so you can see the image in front of the glass panel. LCD ambient light to display information, the LCD itself is not self-luminous, LCD power consumption is very low, more suitable for single-chip low-power applications. In addition, the LCD can only use low-frequency AC voltage drive, the DC voltage will damage the LCD. There are many types of LCD segment liquid crystal character LCD, graphical LCD. Segment LCD inexpensive, simple to use, is widely used in a variety of microcomputer application system.MSP430 LCD driver module has four driving method, respectively, for static drive, 2MUX drive, 3MUX, Drivers, 4MUX drive. Static driving method, in additionto the public badly in need of a pin, each section of the drive each one pin. If the design involves a lot of number of segments, you need to take up the many pin. In order to reduce the pin number, you can select multiple drive needed: 2MUX drive, drive, 3MUX 4MUX driving method. Increase the number of public-pole, can greatly reduce the number of pins. Need to drive more segments, the more obvious effects. ConclusionThe design requirements to simultaneously detect the temperature and humidity. From the temperature and humidity sensor signal IIC bus to enter MSP430F437 MSP430F437, temperature and humidity data on the one hand to send the LCD display; the other hand, the temperature and humidity data is stored in AT25256 stored temperature and humidity data can be transmitted via RS232 bus to the PC, In the PC application, you can curve shows the temperature and humidity data, and can print the report.This design uses the MSP430 MCU measurement of temperature and humidity, display, storage, transmission, printing and other functions. But also through the button on the temperature and humidity measurement time interval, whether storage, starting time and other parameters set. In addition, the entire system can be connected to external 9V DC power supply, you can use a 9V lithium battery-powered, low-power design ultra-low power MSP430 MCU, and program design, making the whole system very power, particularly suitable for hand-held meter.中文翻译:温湿度测量仪1 引言温湿度测量是现代测量新发展出来的一个领域,尤其湿度的测量更是不断前进。
花园湿度控制器的设计(含程序,原理图和PCB)
花园湿度控制器的设计摘要:本系统采用AT89C51作为控制系统,通过模拟传感器把湿度信号采集后送给ADC0804,转换成数字信号后送入单片机,再通过LCD1602显示出来。
同时独立键盘输入湿度上门限值和下门限值,当湿度值低于上门限值50%时系统驱动控制电机进行湿度控制,当湿度再次回到上门限值50%以上时停止湿度控制。
本系统实时刷新当前湿度和门限值,适用于大棚,花卉以及家庭湿度检测与控制。
关键词:AT89C51,LCD1602,ADC0804,湿度控制与检测The design of garden humidity controller Abstract:This system used AT89C51 as control system, by simulation sensor to humidity signal collection sent to ADC0804, conversion into digital signal sent into single tablets machine, then by LCD1602 displayed out. Independent keyboard input humidity at the same time the door limit and door limit, when the humidity is lower than 50% the door limit motor drive control system for humidity control, when humidity went back to the door limit stops humidity control more than 50%, This system live and refreshes the current humidity threshold values, apply to greenhouse, flower and family and humidity measuring and controllingKeyword:AT89C51,LCD1602,ADC0804,Humidity control and detection目录1 前言---------------------------------------------------------------------------------------------- 12 总体方案设计---------------------------------------------------------------------------------- 22.1 主控芯片模块的选择 ----------------------------------------------------------------- 22.2 湿度传感器的选择 -------------------------------------------------------------------- 22.3 A/D转换模块的选择---------------------------------------------------------------- 22.4 显示模块的选择 ----------------------------------------------------------------------- 32.5 系统的设计原则 ----------------------------------------------------------------------- 32.6 系统组成与框图 ----------------------------------------------------------------------- 43 系统单元模块分析---------------------------------------------------------------------------- 53.1 AT89C51简介 ------------------------------------------------------------------------ 53.1.1 AT89C51主要特性----------------------------------------------------------- 53.1.2 AT89C51管脚说明----------------------------------------------------------- 53.2 振荡器特性 ----------------------------------------------------------------------------- 73.3 时钟电路 -------------------------------------------------------------------------------- 83.4 复位电路 -------------------------------------------------------------------------------- 83.5 A/D转换电路------------------------------------------------------------------------- 93.6 湿度传感器 --------------------------------------------------------------------------- 103.6.1 湿敏电阻----------------------------------------------------------------------- 103.6.2 湿敏电容----------------------------------------------------------------------- 113.6.3 湿度测量的名词术语-------------------------------------------------------- 113.7 LCD液晶显示器------------------------------------------------------------------- 124 硬件电路的设计----------------------------------------------------------------------------- 144.1 湿度传感器与ADC0804 ----------------------------------------------------------- 144.2 LCD电路图 ------------------------------------------------------------------------- 154.3 独立键盘与驱动电路 --------------------------------------------------------------- 164.4 总体电路设计 ------------------------------------------------------------------------ 165 程序流程图与代码-------------------------------------------------------------------------- 175.1 主要程序流程图 --------------------------------------------------------------------- 175.2 主要程序代码 ------------------------------------------------------------------------ 196 系统的调试与总结-------------------------------------------------------------------------- 196.1 单片机测试 --------------------------------------------------------------------------- 196.2 硬件及软件调试 --------------------------------------------------------------------- 196.3 整机的调试与测试 ------------------------------------------------------------------ 206.4 综合调试 ------------------------------------------------------------------------------ 207 总结-------------------------------------------------------------------------------------------- 21参考文献----------------------------------------------------------------------------------------- 22附录一-------------------------------------------------------------------------------------------- 23附录二-------------------------------------------------------------------------------------------- 24附录三-------------------------------------------------------------------------------------------- 251 前言在工农业生产和日常生活中,对湿度的测量及控制始终占据着重要地位。
08湿度传感器系统毕业论文中英文资料外文翻译文献

湿度传感器系统中英文资料外文翻译文献英文:The right design for a relative humidity sensor systemOptimizing the response characteristics and accuracy of a humidity sensor system1 OverviewTo make the right choice when selecting a relative humidity sensor for an application, it is important to know and to be able to judge the deciding factors. In addition to long-term stability, which is a measure on how much a sensor changes its properties over time, these factors also include the measurement accuracy and the response characteristics of the sensor. Capacitive humidity sensors are based on the principle that a humidity-sensitive polymer absorbs or releases moisture as a function of the relative ambient humidity. Because this method is only a spot measurement at the sensor location, and usually the humidity of the surroundings is the desired quantity, the sensor must be brought into moisture equilibrium with the surroundings to obtain a precise measurement value. This process is realized by various transport phenomena (cf. the section titled "The housing effect on the response time"), which exhibit a time constant. Accuracy and response time are thus closely dependent on each other, and the design of a humidity measurement system becomes a challenge.2Measurement accuracyThe term measurement accuracy of a humidity sensor is understood primarily to refer to the deviation of the value measured by the sensor from the actual humidity. To determine the measurement accuracy, references, such as chilled mirror hygrometers, whose own tolerance must be taken into account, are used. In addition to this trivial component, humidity sensors require a given time for reaching stable humidity and temperature equilibrium (the humidity is a function of temperature and decreases with increasing temperature; a difference between sensor and ambient temperature leads to measurement errors). This response time thus has a significant effect on the value measured by the sensor and thus on the determined accuracy.This time-dependent characteristic is explained in more detail in the following.3Response characteristics and response timeThe response characteristics are defined by various parameters. These are:●The actual response characteristics of the humidity sensor at constant temperature.(1) How quickly the sensitive polymer absorbs or releases moisture until equilibrium is reached (intrinsic response time)(2) How fast the entire system reaches humidity equilibrium (housing effect)●The thermal response characteristics of the humidity sensor at a non-constant temperature(3) The thermal mass of the sensor(4) The system's thermal mass, which is thermally coupled to the sensor (e.g. printed circuit board)(5) Heat sources in the direct surroundings of the sensor (electronic components)(1) and (3) are determined entirely by the sensor itself, (1) primarily by the characteristics of the sensitive polymer.(2) and (4) are primarily determined by the construction of the entire system (shape and size of housing andreadout circuitry).(5) is determined by heat-emitting electronic components.These points will be discussed in more detail in the following.The intrinsic response time (1)Qualitatively, the response characteristics of capacitive humidity sensors look like the following (Fig. 1).Fig. 1: Typical and idealized response characteristics of capacitive humidity sensors (schematic)Because these response characteristics are especially pronounced at high humidity values,an isothermal humidity jump from 40% to 100% was selected here for illustration. The desired ideal behavior of the sensor is indicated in blue. In practice, however, the sensor behaves according to the red line, approximately according to:=(E-S)*(1-e)+SRH-t(t)Here, the time span 1 is usually very short (typ. 1 – 30 min.), in contrast, the time span 2 is very long (typ. Many hours to days). Here the connection of measurement accuracy and response characteristics becomes clear (t until RH=100% is reached). The value at t4 (Fig. 1) is considered to be an exact measured value. However, this assumes that both the humidity and also the temperature remain stable during this entire time, and that the testing waits until this very long measurement time is completed. These conditions are both very hard to achieve and unusual in practice. For the calibration, there are the following two approaches, which both find use in practice (cf. Fig. 2):1.The measured value at t2 (Fig. 1) is used as a calibration reference.Advantage:●The required measurement time for reaching the end value (in the example 100%) isclearly shortened,corresponds to practice, and achieves an apparent short responsetime of the sensor (cf. Fig. 2).Disadvantage:●If the conditions are similar for a long time (e.g., wet periods in outdoor operation),the sensors exceed the correct end value (in the example 100%) undesirably by upto 10% (cf. Fig. 2).2. The measured value at t4 (Fig. 1) is used as a calibration reference.Advantage:●Even for similar conditions over a long time (e.g., wet periods in outdoor operation),an exact measurement result is obtained (cf. Fig. 2).Disadvantage:●For a humidity jump like in Fig. 1, the sensors very quickly deliver the measuredvalue at t2, but reaching a stable end value (about 3-6% higher) takes a long time(apparent longer response time)(cf. Fig. 2).In order to take into account both approaches optimally, the measured values at t3 (cf. Fig. 1) are used as the calibration reference by Sensirion AG.Fig. 2: Response characteristics of different humidity measurement systemsThe housing effect on the response time (2)Here, two types of transport phenomena play a deciding role:●Convection: For this very fast process, the air, whose humidity is to be determined,is transported to the sensor by means of ventilation.●Diffusion: This very slow process is determined by the thermal, molecularself-motion of the water molecules. It occurs even in "stationary" air (e.g., within ahousing), but leads to a long response time.In order to achieve favorable response characteristics in the humidity measurement system, the very fast convection process must be supported by large housing openings and the slow diffusion process must be supported by a small housing around the sensor (small "deadvolume") with "stationary" air reduced to a minimum. The following applies:Thermal effects (3), (4), and (5)Because the total thermal mass of the humidity measurement system (sensor + housing)has a significant effect on its response time, the total thermal mass must be kept as low aspossible. The greater the total thermal mass, the more inert the measurement system becomesthermally and its response time, which is temperature-dependent, increases. In order toprevent measurement errors, the sensor should not be mounted in the vicinity of heatgenerating components.4Summary –what should be taken into account when designing a humidity measurement systemIn order to achieve error-free operation of a humidity-measurement system with response times as short as possible, the following points should be taken into account especially for the selection of the sensor and for the design of the system.●The selection of the humidity sensor element. It should●be as small as possible,●have a thermal mass that is as low as possible,●work with a polymer, which exhibits minimal fluctuations in measured values duringthe time span 2(cf. Fig. 1); testing gives simple information on this condition,●provide calibration, which corresponds to the requirements (see above), e. g.,SHT11/SHT15 from Sensirion.●The housing design (cf. Formula 1). It should●have air openings that are as large as possible in the vicinity of the sensor or thesensor should be operated outside of the housing à good convection!●enclose a "dead volume" that is as small as possible around the sensor àlittlediffusion!●The sensor should be decoupled thermally as much as possible from other components,so that the response characteristics of the sensor are not negatively affected by the thermal inertia of the entire system.(e.g., its own printed circuit board for the humidity sensor, structurally partitioning the housing to create a small volume for the humidity sensor, see Fig. 3)Fig. 3: Mounting example for Sensirion sensors SHT11 and SHT15 with slits for thermal decoupling●The sensor should not be mounted in the vicinity of heat sources. If it was, measuredtemperature would increase and measured humidity decrease.5Design proposalThe challenge is to realize a system that operates cleanly by optimally taking into account all of the points in section 4. The already calibrated SMD humidity sensors SHT11 and SHT15 from Sensirion are the ideal solution. For optimum integration of the sensors in a measurement system, Sensirion AG has also developed a filter cap as an adapter aid, which takes into account as much as possible the points in section 4 and also protects the sensor against contaminants with a filter membrane. Fig. 4 shows schematically how the sensors can be ideally integrated into a housing wall by means of the filter cap SF1.Fig. 4: Filter cap for SHT11 and SHT15In addition to the advantages mentioned above, there is also the option of building an IP67-compatible humidity measurement device (with O-ring, cf. Fig. 4) with optimal performance. Detailed information is available on the Sensirion Web site.译文:相对湿度传感器系统的正确设计湿度传感器系统精度及响应特性的优化1.综述为了在相对湿度的应用方面对传感器做出正确的选择,了解和评估那些起决定作用的因素是非常重要的。
湿度控制系统设计
湿度控制系统设计目录摘要 (1)关键词 (1)英文摘要 (1)英文关键词 (1)1 前言 (2)1.1 研究背景与意义 (2)1.2 国内外发展状况 (2)1.3 设计要求 (3)1.4 设计方案研究 (3)2 系统硬件组成电路设计 (3)2.1 系统结构概述 (3)2.2 单片机STC89C52简介 (4)2.3 湿度采集模块 (7)2.3.1 湿度传感器的选取 (7)2.3.2 DHT11引脚说明 (8)2.3.3 湿度测量电路 (8)2.4 电源模块 (8)2.5 键盘及LED液晶显示模块 (9)2.5.1 LED液晶显示模块 (9)2.5.2 键盘模块 (10)2.5.2.1 键盘接口技术原理 (10)2.5.2.2 键盘电路 (10)2.6 报警电路模块 (11)2.6.1 蜂鸣器简介 (11)2.6.2 报警电路 (11)2.7 湿度控制模块 (11)2.7.1 去湿模块 (12)2.7.2 加湿模块 (13)3 软件设计 (14)3.1 主程序流程图 (15)3.2 DHT11的信号发送 (15)4 测试方法及结果分析 (16)4.1 测试方法 (16)4.2 结果分析 (16)5 结束语 (19)参考文献 (19)附录1:总体设计原理图及PCB图 (21)附录3:整机实物图 (22)附录4:软件程序 (22)湿度控制系统设计摘要:随着现代工农业技术的发展,空气的湿度在各个方面的应用也越加广泛,且对空气湿度的要求也越来越高了。
本系统以STC89C52单片机为核心处理器,采用了DHT11湿敏电容数字式温湿度传感器在某特定环境下的湿度进行收集,将采集的数据传入单片机中进行处理,然后通过LED数码管令采集到的湿度值进行显示,接着将所测量值与设置的湿度范围进行对比,当所测得的环境湿度低于所设定的湿度范围的下限值时,驱动加湿器将会进行加湿;如果所测得的环境湿度高于设定的湿度的范围的上限值,驱动电吹风进行工作使环境的湿度下降,以减少所在环境的湿度。
温湿度控制中英文

外文原文Single chip microcomputer and the development of the temperature and humidity sensorAbstract:Temperature control system has been widely used over the past decades. In this paper, a general architecture of distributed temperature control system is put forward based on multi-sensor data fusion and CAN bus. A new method of multi-sensor data fusion based on parameter estimation is proposed for the distributed temperature control system. The major feature of the system is its generality, which is suitable for many fields of large scale temperature control. Experiment shows that this system possesses higher accuracy, reliability, good real—time characteristic and wide application prospectBorn in the 1970 s single chip microcomputer, and experience the SCM, MCU, SOC three phases.(1) SCM namely Single Chip computer stage, main is to seek out the monolithic forms of the embedded system best system structure. "Innovation mode" success, laid the SCM and general computer completely different development road.(2) MCU namely Micro Controller (Micro Controller Unit) stage, the main technological development direction is: expanding meet embedded application, the object system requirements of various peripheral circuit and interface circuit, dash forward show its object the intelligent control ability.(3) MCU is embedded system independent development way, to a key factor to the development of MCU stage, is to seek application system on a chip in the maximization of the solution; Therefore, special MCU development natural form the SOC tendency. With microelectronics technology, IC design, EDA tools development, based on the single chip microcomputer application system SOC design can have larger development.Temperature is a basic physical quantities, everything in nature is closely related with the process of temperature. The temperature sensoris the earliest development, the most widely used kind of sensor. From 17 th century people began to use temperature measuring. The temperature sensor there are four main types: thermocouple, thermal resistance, resistance temperature detector (RTD) and temperature sensor IC. IC temperature sensor and including analog output and digital output two types. Contact temperature sensor detection part and the tested object has a good contact, and calls the thermometer. The thermometer through the transmission or convection reach thermal equilibrium, thus make the thermometer and value can be measured directly says the temperature of the objects. General measurement precision. In a certain temperature range, the thermometer can also be measuring objects of internal temperature distribution. But for sports body, small target or heat capacity is very small objects will produce larger measurement error, commonly used a thermometer have two-metal thermometer, glass liquid thermometer, pressure type thermometer, resistance thermometers, thermistors and temperature difference electric dipole, etc. Contactless temperature sensor sensitive components and tested object each other is not contact, again say non-contact highlighted.it table. This instrument can be used to measure movement object, small goals and heat capacity small or temperature change quickly (transient) the surface temperature of the object, also can used for the measurement of the temperature distribution.Distributed temperature control system has been widely used in our daily life and production, including intelligent building, greenhouse, constant temperature workshop, large and medium granary, depot, and soon[1]. This kind of system should ensure that the environment temperaturecan be kept between two predefined limits. In the conventional temperature measurement systems we build a network through RS-485 Bus using a single-chip metering system based on temperature sensors. With the aid of the network, we can carry out centralized monitoring and controlling. However, when the monitoring area is much more widespread and transmission distance becomes farther, the disadvantages of RS-485 Bus become more obvious. In this situation, the transmission and response speed becomes lower, the anti-interference ability becomes worse. Therefore, we shouldseek out a new communication method to solve the problems produced by RS-485 Bus.During all the communication manners, the industrial control-oriented field bus technology can ensure that we can break through the limitation of traditional point to point communication mode and build up a real distributed control and centralized management system. As a serial communication protocol supporting distributed real-time control, CAN bus has much more merits than RS-485 Bus, such as better error correction ability, better real-time ability, lower cost and so on. Presently, it has been extensively used in the implementation of distributed measurement and control domains.With the development of sensory technology, more and more systems begin to adopt multi-sensor data fusion technology to improve their performances. Multi-sensor data fusion is a kind of paradigm for integrating the data from multiple sources to synthesize the newinformation so that the whole is greater than the sum of its parts [3][4][5].And it is a critical task both in the contemporary and future systems which have distributed networks of low-cost, resource-constrained sensors1.AVR devices profileA VR MCU is 1997 by ATMEL company developed of enhanced the built-in Flash RISC (Reduced Instruction Set CPU) Reduced Instruction Set high speed eight microcontroller. AVR single-chip can be widely used in computer external equipment, industrial real-time control, instrument and apparatus, communication equipment, household electrical appliances, etc. In 1997, the Atmel company Norway design center of Mr. A and V sir, the use of the new technology Atmel company Flash, to research the RISC reduced instruction set high speed eight microcontroller, hereinafter referred to as the AVR.Avr microcontroller characteristicsAVR microcontroller hardware structure take eight machine and 16 machine of compromise strategies that use local registers of deposit (32 register file) and monomer high-speed input/output scheme (i.e. input capture registers, output is matching register and the corresponding control logic). Improve the instruction execution speed (1 Mips/MHz), overcome the bottlenecks, and enhance the function; At the same time, reduce the cost of the management of foreign set, relative simplified the hardware structure, reduce the costs. So AVR microcomputer in the soft/hardware cost, speed, performance and cost many has made optimization balance, is a cost-effective microcontroller.AVR SCM's I/O line can be set on the all take pull-up resistors, set separately for input/output, can be set (initial) the high impedance input,driving ability (can save power drive devices) features, make the I/O mouth flexible and powerful and resources can be fully used.Single chip microcomputer automatic power AVR reset circuit, independent watchdog circuit, low voltage detection circuit BOD, multiple reset source (automatic reset and external reset and electricity, the watchdog reset, BOD reset), can be set to start delay to run the program, enhance the reliability of the embedded system.AVR SCM has a variety of province electricity sleep mode, and wide voltage operation (5-1.8 V), the anti-interference ability is strong, can reduce the average 8 bits of software anti-interference design work machine and the usage of the hardware.AVR microcontroller technology embodies the single-chip microcomputer collect A variety of devices including FLASH program memory, the watchdog, EEPROM, with/asynchronous serial mouth, TWI, SPI, A/D converter module, timer/counter, etc) and A variety of functions (enhance the reliability of the system, reduce the power consumption reduction of anti-interference sleep mode and many varieties of all categories interrupt system, with input and output is matching and capture the timer function of diversification, replace function with/counter the I/O port...) at A suit, fully embodies the microcontroller technology from "piece of self conduct war" to "chip systems SoC" the development direction of the transition.2.Integrated temperature sensorAD590Integrated temperature sensor AD590 to, its temperature resolution for the 0.3 degrees Celsius. The analog signal is output AD590 to, when the temperature of 0 degrees, output current 273.2 microamps, and current variation and temperature variation in a linear relationship, temperature, and once every change, the output current change 1 microamps, the temperature sensor of working temperature range is-30 degrees-150 degrees. If use AD590 to make the temperature sensor, sensor peripheral circuit is simple, just put sampling resistance and AD590 to link and then to amplify the signal, and then using voltage comparator compared to output voltage, voltage comparator output signals can be directly as PLC the input signal.3.Humidity sensorThere are many ways of measuring the air humidity, its principle isbased on certain material from the surrounding air absorb water caused by physical or chemical properties of the change, indirectly from the material of water quantity and the surrounding air humidity. Capacitive and resistive and wet go up wet type according to its original susceptibility were macromolecule material moisture absorption after the dielectric constant and resistivity and volume change and humidity measurementSolution a: the HOS-201 wet sensors. HOS-201 wet sensor for high humidity sensor switches, it's the job of the voltage of ac 1 V the following, frequency for frequency 50 HZ ~ 1 KHZ, humidity measurement range of 0 ~ 100% RH, working temperature range is 0 ~ 50 ℃, impedance in 75% RH (25 ℃) for 1 M Ω. The sensor is used to switch the sensor, not on the wideband range detection humidity, therefore, mainly for the judgment or under more than e. humidity level. However, the sensor to a certain range, have a good use of the linear, and can be effectively using the linear characteristics.Scheme ii: the HS1100 / HS1101 humidity sensor. HS1100 / HS1101 capacitance sensor, in a circuit of equivalent to a capacitor, it has the capacity as the air humidity increases while. Do not need to complete interchangeability of calibration, high reliability and long-term stability, fast response time, patent design of solid polymer structure, the top contact (HS1100) and lateral contact (HS1101) two kinds of packaging products, apply to linear output voltage and frequency output two circuit, is suitable for making automatic assembly line of the plugin and automatic assembly process, etc.Relative humidity at 1%-100% RH range; The capacity to change by 16 pF 200 pF, the error is not more than plus or minus 2% RH; Response time less than 5 S; The temperature coefficient is 0.04 pF / ℃. Visible is higher accuracy.A comprehensive comparison of scheme and scheme ii, plan one although meet the precision and the requirements of the measure humidity range, but its limited to certain scope, have a good use of the linear, and can be effectively using the linear characteristics. And still do not have in this design system of temperature-30 to 50 ℃ request, so we chose this design as the second scheme humidity sensor.4.MC14433 A/D converterMC14433 is three and A half double integral type of the A/D converter, with high precision, good anti-jamming performance advantages, its shortcoming is conversion rate low, about 1-10 times/SEC. Without the requirement of high speed switching occasions, for example, in low speed data acquisition system, is widely used. MC14433A a/D converter and domestic product 5 G14433 are all the same, can be interchanged.5.Multi-sensor data fusonThe aim to use data fusion in the distributed temperature control system is to eliminate the uncertainty, gain a more precise and reliable value than the arithmetical mean of the measured data from finite sensors. Furthermore, when some of the sensors become invalid in the temperature sensor groups, the intelligent CAN node can still obtain the accurate temperature value by fusing the information from the other valid sensors.5.1. Consistency verification of the measured dataDuring the process of temperature measurement in our designed distributed temperature control system, measurement error comes into being inevitably because of the influence of the paroxysmal disturb or the equipment fault. So we should eliminate the careless mistake before data fusion.We can eliminate the measurement errors by using scatter diagram method in the system equipped with little amount of sensors. Parametersto represent the data distribution structure include median—TM, upperquartile number—Fv , lower quartile number—FLand quartiledispersion—dF.It is supposed that each sensor in the temperature control systemproceeds temperature measurement independently. In the system, there are eight sensors in each temperature sensor group of the intelligent CAN node. So we can obtain eight temperature values in each CAN node at the same time. We arrange the collected temperature data in a sequence from small to large:T 1, T 2, …, T 8In the sequence, T 1 is the limit inferior and T 8 is the limit superior.We define the median —T M as:(1)The upper quartile —F v is the median of the interval [T M , T 8].The lowerquartile number —F L is the median of the interval [T 1, T M ].The dispersion of the quartile is:(2)We suppose that the data is an aberration one if the distance from the median is greater than adF, that is, the estimation interval of invalid data is:(3)In the formula, a is a constant, which is dependent on the system measurement error, commonly its value is to be 0.5, 1.0, 2.0 and so on. The rest values in the measurement column are considered as to be the valid ones with consistency. And the Single-Chip in the intelligent CAN node will fuse the consistent measurement value to obtain a fusion result6.The research significanceThe collection of temperature and humidity monitoring in daily life has a wide range of USES, the temperature and humidity monitor based on this and design, the biggest advantage is that it can display the current temperature and humidity measurement, and the current temperature and preset temperature carries on the comparison, more than when the current temperature and humidity preset temperature alarm, realize the historicaldata monitoring, collection and analysis purposes. The temperature and humidity monitoring alarm low power consumption, can use the minimal resource for different temperature for high precision measurement, reliable performance, convenient operation information, complex work through software programming to complete, easy to get results, in actual use for the ideal effect. This design has realized to the real-time control of the temperature, flexible control precision and reliability, high, can meet the product preliminary test the requirements of the aging. In the processing of constant temperature and heating temperature, formed a complete set of control plan, can transplantation for constant temperature, heating the house and equipment many aspects. Therefore, this design research results and the design idea can be good in other design transplantation, did it and the actual good union, with strong practical significance.译文单片机及温湿度传感器的发展摘要:在过去的几十年,温度控制系统已经被广泛的应用。
恒温恒湿试验箱控制系统毕业设计 外文翻译
毕业设计(论文)外文资料翻译题目: 博物馆储藏室空调系统的温度和湿度独立控制装置院系名称:电气工程学院专业班级:电气F0802学生姓名:宋海华学号:200848720201 指导教师:王伟生教师职称:讲师起止日期:2012.3.1-4.1 地点: 31520附件: 1.外文资料翻译译文;2.外文原文。
指导教师评语:签名:年月日博物馆储藏室空调系统的温度和湿度独立控制装置摘要:对于博物馆文化遗产的保护,精确控制博物馆室内的热湿参数和气流速度,为适合室内环境需要,HV AC系统往往是必要。
应防止这些参数在设计值上的大偏差,因为它们可能导致艺术品的退化。
因此,消耗更多的能源是不可避免的。
本文针对博物馆储藏室空调系统提出了一种新型温度和湿度独立控制(THIC)设备和及其相关的控制方法。
与传统的空调系统相比,冷却线圈(CC)的仪器露点通常是固定的,在节能方式上,由于该系统采用THIC设备,可以实现独立的温度和湿度控制。
实验研究表明,与传统的HV AC空调系统相比,该系统采用再加热和加湿室内热测湿环境,可降低能耗21.7%,并且储藏室的温度和湿度也保持稳定在较高的精度水平。
1、引言保护艺术作品,需要精确地控制室内小气候条件。
因此,一个博物馆往往需要一个合适可靠的HV AC空调控制系统,以维持室内合适的热测湿参数和风速,并从设计值上尽量减少这些参数的误差。
它包括加热、加湿、冷却、除湿和自动控制装置,同时控制温度和湿度。
因此,对于博物馆空调系统它是必不可少。
考虑到博物馆的HV AC系统始终要维持每天运行24小时,终年如此,一个合适的技术,可获得大量节能[1],并保证室内良好的热测湿气候就显得尤为重要了。
据一些文献[2-5]讲,如果HV AC系统采用合适的节能技术,能源消耗将减少约10-50%。
习惯上对于传统的HV AC系统,在露点温度固定,冷却盘管中空气处理过程中,空气进入后,CC过度冷却,以保证温度和湿度比(CC)均低于送风参数,然后在加热和增湿的能源补偿得到结果。
测控技术与仪器专业外文翻译--温室温度和湿度智能控制系统
外文出处:Proceedings of the 3rd WSEAS Int. Conf. on CIRCUITS, SYSTEMS, SIGNAL and TELECOMMUNICATIONS.2009,51(17):120-125中文译文温室温度和湿度智能控制系统摘要:文章是基于嵌入式数据库的温室温湿度智能控制系统。
该系统提出在温室温湿度智能控制系统中采用嵌入式数据库技术,来控制温室作物的生长过程,以解决温室作物在温度和湿度控制的环境中生长过程并不理想的问题,以及提高系统的控制和成本效益的问题。
本文着重阐述了控制系统的结构,硬件、软件的设计和系统控制策略。
该控制系统具有硬件结构简单,成本低,易于使用和维护,温度和湿度数据兼测,稳定性好等优点。
关键语:嵌入式数据库,温度和湿度控制,数据过滤,温室,微控制器1 简介带有嵌入式微控制器技术、智能控制系统是科技发展的方向。
数据库是决策智能控制系统的核心,是智能控制的基础,它需要存储的专业知识和例子很多,也需要不断更新和添加实时数据。
为了确保在温室环境下正常的农业生产和高效率,提高农产品质量和数量,降低劳动强度,节约能源,是温室环境中对温度和湿度控制的必要条件。
目前在温室环境下中、低档产品的控制仍存在一些技术问题:一般只对一套温度和湿度控制使用。
由于作物对温度和湿度的要求不一样,用户必须经常调整控制器的设置,这难以满足现代农业生产的要求。
开发一个,低价格,系统可靠的温室是温湿度智能控制系统必需的。
温室环境是非线性的,参数分布,时变,长延迟,多变量耦合和多个控制对象的控制系统。
在温室中培育不同作物需要不同的栖息地。
在温室的温湿度控制系统中建立温室环境的嵌入式数据库系统的目的在于:(1)专家的经验与用户的实际需要相结合,灵活和自动化生产适合对具体对象种植的监测战略;(二)未提供关于作物栽培系统的专家经验,用户可以通过控制系统的独立运作的使用方式建立监测数据库,并长期保存;(三)建立可能对用户系统进行优化和修改的监测数据。
基于单片机的湿度控制系统设计
基于单片机的湿度控制系统设计摘要:生活上,合适的空气湿度有益于人们的身体健康;工业上,芯片的封装,设备的维护以及工厂的装配等,都需要在合适的湿度下进行.该课题对空气的湿度进行研究,采用单片机和湿度模块组成的湿度控制系统,对环境的湿度进行数据采集、处理.系统通过测量当前环境的绝对湿度,及时、精确地了解空气湿度的变化,并将当时绝对湿度值与预设的上下限值进行比较,如果不在合适的空气湿度范围内,系统会自动发出报警。
本设计具有控制方便、组态简单和灵活性大等优点。
关键词:单片机;湿度传感器;ADC0832数模转换Based on SCM humidity control system design Abstract:In daily life,suitable air humidity beneficial to people’s health。
In industry,chip encapsulation, equipment maintenance and factory assembly,etc, all need in appropriate humidity to work。
This essay analyzes the humidity of the air,the humidity control system constituted by single-chip microcomputer and humidity sensor collect the data of the environmental humidity and deal with it。
This system can be aware of the change of the environmental humidity timely and accurately by measure absolute humidity, absolute humidity measured by system will be compare with the presupposed upper limit and lower limit。
图书馆的温湿度控制系统设计英文翻译
图书馆的温湿度控制系统设计1、高清敏,2、高磊1商丘技术研究所,商丘,河南,中国2河南中医学院,郑州,河南,中国电子邮件:gqm@, Gaolei0161@关键词:温度和湿度的测量,风扇控制,智能设计摘要:这是一个基于实验室的温度和湿度的自动测量系统和控制系统的设计。
它是利用现代信息收集技术,计算机数据处理与控制技术,从硬件设备的选择和软件程序的设计,来实现图书馆的温度自动检测的可行性和湿度参数和空调设备的控制。
通过工程实例,系统结构清晰,动能稳定可靠。
它有明显提高了图书馆的书籍保存质量,因此,温度和湿度的控制在图书馆领域的将具有广阔前景。
简介目前,图书馆的温湿度监控系统大多是以普通的自然通风或空气为基础的,该系统具有抗干扰能力低的缺点,和低监测精度等。
图书馆中这些书保存质量、防腐和防霉有很大的关系温度和湿度记录库,一旦图书馆温度和湿度不受控制的,这些书保护将迫在眉睫。
及时和有效地根据情况调解和控制图书馆温度和湿度,并处理相应的关键措施,对于保护和延长书的寿命是很重要。
快速准确的自动检测温度和湿度记录对于改善生活是非常重要的。
根据国家有关规定,本书提出了一种基于检测系统PROFIBUS DP现场总线的数字温度,湿度检测和通风控制为一体的智能图书馆的温度和湿度记录控制系统。
该系统具有结构简单,易于扩充,防水,防雷,防腐蚀等特点。
管理员可以在24小时内知道图书馆从各个方向的温度和湿度的测试结果和与计算机的历史检测记录。
除了测试测量,通信控制,数据显示和打印等功能,该系统也可以给多路报警提示和事故处理等措施。
系统功能现场总线是一种开放的现场总线控制的国际标准。
今天,在世界许多自动设备生产厂家提供了一个现场总线接口设备。
PROFIBUS现场总线被广泛应用于制造加工和建筑自动化等行业。
这是一个成熟的技术。
根据不同特点的应用,PROFIBUS 可以分为三个兼容的版本:Profibus-DP,Profibus-FMS、PROFIBUS-PA组成了PROFIBUS系列。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5(b)显示与三个电压时的湿度(相对湿度)。
阀的电压为0 V时的湿度增加和饱和率。
在其他两种情况下,湿度的降低,然后增加和饱和曲线图所示。
5(B)。
虽然也有一些分歧的情况下,相对湿度增加,在一般情况下,由于温度降低。
为了降低湿度,潮湿的空气干燥加热器芯,或在传统的系统从发动机的热空气混合。
加热和风扇转速的组合控制也使用,但它是很难控制系统中的温度和湿度的同时。
在本文章中,有一个精确的控制,压缩机,电磁阀控制温度,除湿转子控制湿度。
(5)加热器的核心有传统系统的特点,也与热水器的核心能力为1200 W的使用。
它被放置在空调出点打击,并用于通断控制。
热水器在目前的制度,当然不需要。
3.目前系统的温度和湿度控制4.目前系统和传统系统的能量之间的比较.由于压缩机的能源消耗是亲部分的扭矩,扭矩测量。
B曲线图。
12描述了PD 控制下的传统系统,曲线图A扭矩响应时间。
12(二)目前的控制下,我们的除湿系统的响应。
在控制后的初始地区,本系统和传统系统之间的扭矩的差异很小,原文:High energy efficiency desiccant assisted automobile air-conditioner and its temperature andhumidity control systemK. Nagaya*, T. Senbongi, Y. Li, J. Zheng, I. MurakamiDepartment of Mechanical Engineering, Gunma University Kiryu, Gunma 376-8515, JapanReceived 9 November 2004; accepted 6 December 2005Available online 19 January 2006Abstract: The energy efficiency is of importance in air conditioning systems for automobiles. The present article provides a new type air con-ditioning system for automobiles in which energy loss is small in comparison with the previous system. In the system, a desiccant is installed in the air conditioning system for controlling both temperature and humidity. The control is performed by an electromagnetic control valve, which controls an inclination of the rotating plate of a compressor. It is difficult to control both temperature and humidity precisely, because there are some delays in the control due to the time of heat exchange and that of coolant flow from the actuator (elec-tromagnetic valve) to the evaporator. In order to have precise control, this article also presents a method of control with consideration of control delays. The energy of our system is compared with that in the previous conventional system in the same condition. It is shown that our controlled results and energy efficiency are better than those in the previous system.Keywords: Automobile; Car; Air conditioner; Desiccant; Temperature control; Humidity control; Low energy; Energy loss1. IntroductionRecently, air conditioners with small energy loss and low environmental hazard are required, and a number of interesting studies have been reported for building air con-ditioners and automobile air conditioners [1–12] . In the studies, various methods were discussed for decreasing energies and environmental hazard based on thermo-dynamics and fluid dynamics, and optimal conditions were found experimentally [1–8]. Recently, theoretical and numerical approaches were also given [9–12] . In the sys-tems presented in the above papers, the cooling systems were discussed mainly. In air conditioners, both the tem-perature and humidity should be controlled simulta-neously. However, the studies on the humidity decreasing system have not been investigated thoroughly. Inconven-tional air conditioners, in general, the humidity is con-trolled by a heater, and so the system has a small energy efficiency for controlling humidity. The energy loss due to the humidity control is also important factor in the air con-ditioning system. From the situation, Subramanyam et al.presented the system of a desiccant assisted air-conditioner [13,14] , in which the reheat system was not required. The system can be used in usual building air conditioners, but it has not been applied to automobile air conditioners.For an automobile, a small energy loss air conditioner isstrongly required, because the compressor is driven by the engine. Since the air was cooled at lower temperature, then reheated to have dry air in the system, the energy efficiency decreases, and it is difficult to control humidity exactly.When the humidity is large, one feels uncomfortable, even if the temperature is in the comfortable range. There is the relation between the temperature and humidity in which one feels comfortable. Hence, both the temperature andhumidity have to be in the appropriate range. not controlled exactly, although the humidity is decreased by the reheat system.The object of this paper is to present an air conditioner for automobiles from a stand point of engineering applica-tions, which can control both temperature and humidity, and whose energy efficiency is large in comparison with previous automobile air conditioners. In order to have such a system, the desiccant [13,14] is utilized for the automobile air conditioner. The air conditioning system of the automo-bile is somewhat different from building air conditioners, and so the control system and the control algorithm are important. In this article, an air conditioning system using the desiccant is presented, in which the compressor is con-trolled by an electromagnetic valve. Since there is a time delay in the system due to coolant fluid flow and heat exchange, a control method is also presented with consid-eration of the time delay. The torque of the system is com-pared with the conventional system for the same temperature and humidity.2. Development of an automobile air conditioner using desiccants2.1. Geometry of the systemAlthough there are a few changes, the cooling system used in this experiment is the same as the usual automobile air conditioner in which R134A is used as the working fluid.Fig. 1 shows the geometry of the automobile air-con-ditioner system presented in this article.In order to drive the compressor, an induction motor instead of an engine Is used, in which motor 1 drives pulley 3 and 4, and its tor-que is transmitted to compressor 5. When clutch 6 of com-pressor 5 works, the rotary motion of the motor is transformed to the reciprocating motion.It compresses the coolant in the compressor whose pressure is controlled by an electromagnetic valve 7. Condenser 9 cools the cool-ant, and liquid tank 10 separates the liquid from the vapor and so only the liquid coolant is supplied to evaporator 11. Evaporator 11 gets the heat, and the coolant fluid becomes gas due to the evaporation. This cycle is repeated, and the air temperature decreases around the evaporator. In the system, although the temperature decreases, the humidity increases. Both temperature and humidity are of impor-tance for making comfortable atmosphere, and so the cooled air is heated in the usual air conditioner to have low humidity air. In the system, although the humidity decreases, its control is not perfect, because it is difficult to control the humidity in the system. In addition, since the cooled air is heated, the temperature of air should be cooled under the required temperature. This means that the energy loss will be large.A desiccant is appropriate for having dry air, becausethe desiccant rotor works under low temperature, and so the present article uses desiccant rotor 14 as shown in Fig. 1 . To have the same humidity in the experiment,humidifier 15 supplies humid air to the experiment. It is not required in the real air conditioner of course.2.2. Elements used in the systemIn the above-mentioned system, temperature–humidity sensor 13 detects the temperature and the humidity at the blow out point of the air conditioner, torque meter 2 detects the torque of the compressor shaft, and signals of those are input to Digital signal processor 19 (DSP19). Using these signals, DSP 19 calculates the appropriate con-trolvoltage of the electromagnetic valve in the compressor as mentioned below. The elements used in this system are.as follows:(1) Electromagnetic clutch 6.Clutch 6 allows on–off control of the transmission con-nection between the driving shaft of the motor and the compressor shaft. This is also used as a safety device, cut-ting the transmission when condenser 9 freezes. When the temperature increases, it makes a connection of the trans-mission again.(2) Evaporator fan 12.Evaporator fan 12 cools the evaporator, and so the evaporation increases when the fan speeds increases. To compare the present system and a conventional system, the experimental conditions should be the same, and so the experiment is made in the constant fan speed.(3) Desiccant 14.Since, the low constant speed is desirable for the desic-cant rotor for having enough efficiency as mentioned in Refs.[13,14] , on–off control is utilized for the desiccantrotor. Fig. 2 shows the comparison of a conventional sys-tem (Fig. 2(a)) and the present system ( Fig. 2(b)).In the conventional system, since the suction air is cooled by the evaporator, and reheated by a heater core, cooled and low humidity air flows in the car room. In this case, the temperature of cooled air has to be significantly smaller than the desired temperature because of reheating. This means that the strong over cooling is required in thecon-ventional system. While, in our system, dry air from the desiccant is mixed to the suction air, and so cooled and low humidity air is created. Although the temperature of dry air from the desiccant is slightly larger than the desired temperature, the temperature of cooled air is close to the desired temperature. This enables the energy loss due to over cooling small in our system. Fig. 3 shows the geometry of the desiccant rotor in which the silica gel is installed. Moistures of suction air are absorbed in silica gel when the air passes through the desiccate area, and dry air flows out. Wet air flows out when the rotor rotates at the repro-duction area, where the heated air flows in the wet silica gel, because the moisture in the gel flows out under heated air created by a heater. Air cools the gel when the heated region is rotated into the recovery region. Repeating this cycle, dry air can be obtained from the rotor. The desiccant used in this experiment is as follows: flow rate = 100 m 3/h,and moisture absorbing capacity = 350 g/h. Fig. 4 depicts he relation between the absolute humidity after procession and suction absolute humidity for this desiccant.The effects of the desiccant and the humidifier on the tem-perature and humidity are first investigated. When only thedesiccant works, the temperature converges to about 31℃, and when only the humidifier works, the temper also con-verges about 31℃. When both the desiccant and humidifier work, the temperature converges about 34℃. As for the humidity, the desiccant is capable to decrease the humidityuntil 5%. The humidity of the humidifier is controlled, and it creates humidity until 60%. The settling time for both the temperature and the humidity were about 180 s.In order to dry the silica gel in the desiccant rotor, this system uses an electric heater. Recently, a method of using engine heat is discussed for having dry air instead of using the heater. In the present system, although a tube supply-ing the heat from a radiator to the silica gel rotor is required, the method is also applicable, so the energy due to the heater is not required in such system.(4) Electromagnetic valve 7 in compressor 5.Since a real time control of the temperature is required in this system, the compressor with an electromagnetic valve is appropriate. The electromagnetic valve controls an inclination of the plate with pistons for a plate–piston type compressor, in which piston the electromagnetic valve controls strokes. The compressor used in this experiment is MLA6167A made by Calsonic Co. Ltd, which is used in a usual automobile air conditioner.The performance test was carried out for this compres-sor under non-control. Fig. 5(a) shows the temperature ver-sus time for three cases of electromagnetic valve voltages (0, 6 and 12 V). The test was made continuously, and so the value at 600 s is the same as the initial value of the next case. When there is no input voltage to the valve, the temperature decreases with time. This means that the com-pressor works without valve control. The temperature decreases when the valve voltage increases as shown in curves for 6 V and 12 V. The result of 12 V is shown as the special case, because the temperature under the freezing point is not used in the air conditioner. From the figure, the capacity of the compressor is enoughFig. 5(b) shows the humidity (relative humidity) versus time in three voltages. The humidity increases and satu- rates in case of 0 V valve voltage. In the other two cases, the humidity decreases, then increases and saturates as shown in the curves in Fig. 5 (b). Although there are a few differences in the cases, the relative humidity increases, in general, because of decreasing temperature. In order to decrease the humidity, wet air is dried by the heater core or by mixing heated air from the engine in conventional systems. The combination controls of heating and fan speed are also used, but it is difficult to control both tem- perature and humidity in the system simultaneously. In the present article, to have a precise control, the electro- magnetic valve in the compressor controls temperature, and the desiccant rotor controls humidity.(5) Heater core.To have the characteristic of the conventional system, a heater- core with capacity of 1200 W was also used. It was laid at the blow out point of the air conditioner, and on–off control is used. In the present system, the heater is not required of course.3. Temperature and humidity control for the present system4. Comparison between energies for the present system and the conventional systemSince, the conventional system reheats the air for obtaining low humidity air, a large over cooling is required. The over cooling consumes the energy in the compressor. In the present system, using the desiccant, the over cooling is significantly small in comparison with the conventional system. To clarify it, the energies consumed in the compres- sors are investigated for both our system and the conven- tional system. The experiments are performed in the sameconditions in both cases.Since the consumed energy in the compressor is in pro- portion to the torque, the torque is measured. Curve B in Fig. 12 depicts the time response of the torque for the con- ventional system under the PD control, and curve A in Fig. 12(b) the response for our desiccant system under the present control. At the initial region after the control, the difference of the torques between the present system and conventional system is small, but after 40 s, repetitions of large torques are observed in the conventional system, while in our system, small torques with small oscillations are observed. It is clear that the total torque of the present system is smaller than that of the conventional system. The mean values of the torques are shown inTables 3–5 for three shaft rotation speeds. Since, the region from 0 to 100 s is unsteady under the control, the mean values are obtained in two cases of the time from 0 to 100 s (0℃ in the tables) and the time after 100 s (100℃in the tables). The tables imply that the torque is depending on the speed, and the energy loss can be decreased about 27% for 900 rpm, 18% for 1800 rpm, and 17% for 2400 rpm by using the present system. Although a maintenance work in the silica gel will be required, this is the advantage of our system.5. ConclusionA desiccant assisted automobile air conditioner control system has been presented, in which both temperatureand humidity are controlled precisely. In order to control the system, an adaptive control combining the PD control was presented. Experimental test have been carried out for a prototype system made in this experiment. It is ascertained that, it is difficult to control the humidity at the blow-out point of the air-conditioner in the conventional system, while our system can control both the temperature and the humidity. In addition, energy consumption of our system is smaller than that of the conventional system.。